Формализованный подход к проектированию микропроцессорных систем с элементами человеко-машинного взаимодействия

Автор: И. В. Ковалев, В. В. Лосев, А. О. Калинин
Журнал: Современные инновации, системы и технологии.
Рубрика: Управление, вычислительная техника и информатика
Статья в выпуске: 3 (2), 2023 года.
Бесплатный доступ
В статье рассматривается методология формализованного подхода по проектированию микропроцессорных систем, обеспечивающих человеко-машинное взаимодействие. Рассмотрены классические процедуры проектирования последовательностных систем (схемной логики), применимые для разработки МП-систем, в частности формальные методики получения таблиц переходов/выходов и графа проектируемого автомата. Основной акцент проектирования строится на логике графа автомата Мили, характеризуемый тем, что в течение всего периода «устойчивого» состояния Qi входной Хi и выходной Zi векторы остаются неизменными. Однако, при этом условные операторы алгоритма селектируют изменения входного вектора Xi, если оно произошло в состоянии Qi под воздействием внешних по отношению к МП-системе событий. В результате такой селекции МП-система переходит к иному «устойчивому» состоянию Qi+k, которое определено схемой алгоритма. В качестве примера проектируемой МП-системы выступает контроллер вызова управляющих подпрограмм, соответствующих конкретным режимам работы объекта управления. Предложено программное решение участка алгоритма, обеспечивающего условный переход по результатам реализации процедуры сравнения констант. В качестве обоснования функциональной реализации прототипа проектируемого контроллера приведена принципиальная электрическая схема на базе микроконтроллера, обеспечивающая элементы человеко-машинного взаимодействия.
МП-система, микроконтроллер, человеко-машинное взаимодействие, граф автомата
Короткий адрес: https://sciup.org/14127258
IDR: 14127258 | УДК: 004.5, 004.41, 519.1 | DOI: 10.47813/2782-2818-2023-3-2-0243-0253
Текст статьи Формализованный подход к проектированию микропроцессорных систем с элементами человеко-машинного взаимодействия
DOI:
Применение микропроцессоров в различных системах, где требуется сбор, передача, обработка и отображение информации, позволяет обеспечить принципиально новый уровень эксплуатационных характеристик, таких как надежность и простота обслуживания систем, с одной стороны, а также полнота и сложность выполняемых ими функций, с другой.
В наибольшей степени все вышеперечисленные свойства проявляются в однокристальных микроЭВМ или, как их чаще называют по области применения, микроконтроллерах. В микроконтроллерах на одном кристалле объединяются все составные части компьютера: микропроцессор (часто его называют ядром микроконтроллера), оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), таймеры и порты ввода – вывода.
Поскольку микроконтроллер является микрочипом – вычислительным устройством, требующих организации внешних схемотехнических решений по организации системы питания, обеспечения периферийными устройствами ввода -вывода, а также пользовательскими интерфейсами, то вопрос использования возможностей микроконтроллера уходит в плоскость проектирования пользовательских или встраиваемых микропроцессорных систем с элементами интерфейса для обеспечения человеко-машинного взаимодействия.
К настоящему времени формализованные методы проектирования комбинационных и последовательностных схем на интегральных схемах получили широкое теоретическое и практическое развитие. Эти формализованные методы не могут быть непосредственно применены для систем, использующих МП, так как сам МП является программно-управляемым автоматом. Однако некоторые классические процедуры проектирования последовательностных систем (схемной логики) могут быть применены для разработки МП-систем.
В работе показано. что к таким процедурам относятся, прежде всего, формальные методики получения минимизированных таблиц переходов/выходов и графа проектируемого автомата (рисунок 1). Приводимый пример проектирования дает представление об использовании некоторых классических процедур синтеза применительно к МП [1-4].
ПОСТАНОВКА ЗАДАЧИ
Требуется спроектировать контроллер вызова управляющих подпрограмм, соответствующих конкретным режимам работы объекта управления [5]. Предполагается, что вызов каждой из подпрограмм осуществляется диспетчером аппаратно, формированием управляющего ключа - комбинации двоичного пятиразрядного числа.
В качестве устройства ввода предполагается использовать набор двухпозиционных переключателей, обеспечивающих формирование устойчивых "1" и "0". Для модельной интерпретации выполнения подпрограмм предусмотрим получение расчетных результатов, в формате двоичных восьмиразрядных чисел.
В качестве устройства вывода для визуального отображение результатов управляющих подпрограмм предусмотрим линейку светодиодов.
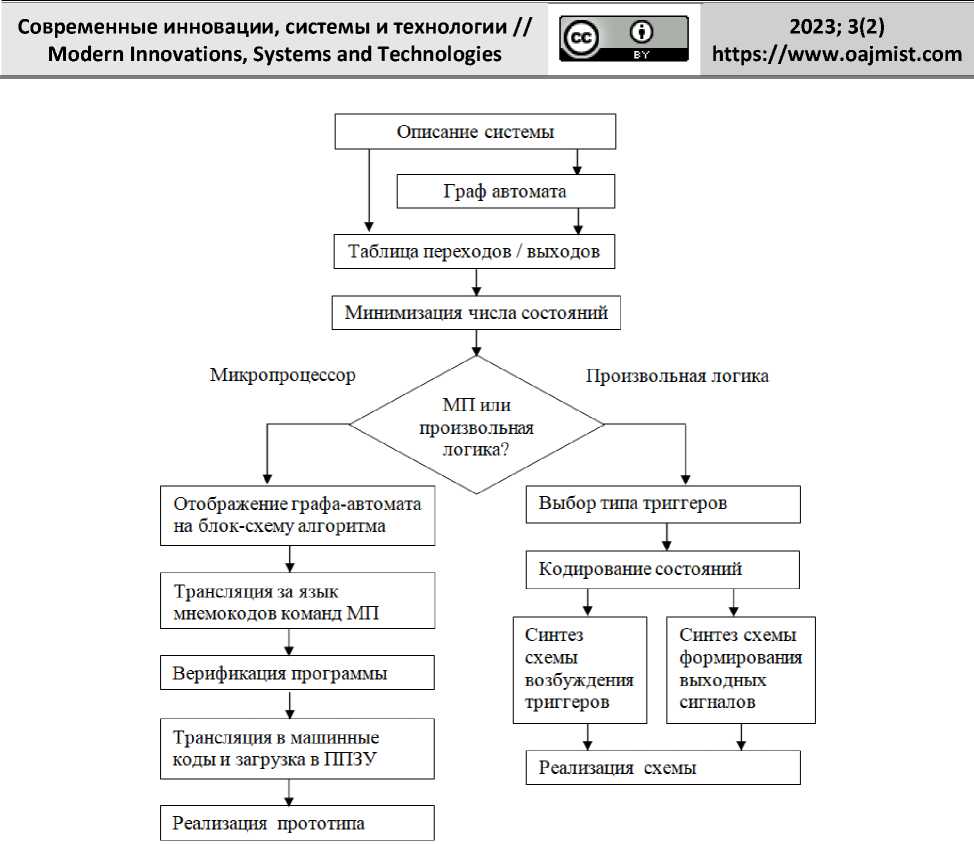
Рисунок 1. Последовательность разработки МП-системы.
Figure 1. The sequence of development of the MP-system.
Инженерная интерпретация задачи
В таблице 1 отражено формализованное описание системы, а на рисунке 2 показана примерная структурная схема контроллера.
Таблица 1. Спецификация выходных управляющих воздействий.
-
Table 1. Specification of output control actions.
Векторы
B 7
B 6
B 5
B 4
B 3
B 2
B 1
B 0
Z 1
1 (8)
0
0
0
0
0
0
0
1
Z 2
3 (8)
0
0
0
0
0
0
1
1
Z 3
7 (8)
0
0
0
0
0
1
1
1
Z 4
15 (8)
0
0
0
0
1
1
1
1
Z 5
0 (8)
0
0
0
0
0
0
0
0
Множество входные сигналы X (x1, x2, x3, x4, x5) соответствует следующему набору значений {1(8), 3(8), 4(8), 5(8), 7(8)}
|
Х1 Х1 Хз x4 Xs |
8-П El О & о и |
||
|
► Bi |
|||
|
► В: |
|||
|
► B4 -------► Bs -------► B6 -------► В- |
Рисунок 2. Структурная схема проектируемого контроллера.
Figure 2. Structural diagram of the designed controller.
ПОСТРОЕНИЕ ГРАФА АВТОМАТА И МИНИМИЗАЦИЯ ЧИСЛА ВЕРШИН
На рисунке 3 представлен граф автомата, дуги которого размечены входными и выходными векторами x1x2x3x4x5V…Vx1"x2"x3"x4"x5" V…/Z1-5. Таблица 2, 3
иллюстрируют проектируемые переходы/выходы и отмеченные состояния графа-автомата [6-8].
Таблица 2. Таблица переходов / выходов.
-
Table 2. Jump/output table.
Состояние
X 1 , X 2 , X 3 , X 4 , X 5
00001
00011
00100
00101
00111
1
1, Z 1
2, Z 2
-
-
-
2
-
2, Z 2
-
-
3, Z 3
3
-
-
-
4, Z 4
3, Z 3
4
-
-
5, Z 5
4, Z 4
-
5
1, Z 1
2, Z 2
5, Z 5
4, Z 4
3, Z 3
Таблица 3. Таблица отмеченных состояний.
Table 3. Marked states table.
|
Состояние |
X 1 , X 2 , X 3 , X 4 , X 5 |
||||
|
00001 |
00011 |
00100 |
00101 |
00111 |
|
|
Q 1 |
Q 1 |
Q 2 |
- |
- |
- |
|
Q 2 |
- |
Q 2 |
- |
- |
Q 3 |
|
Q 3 |
- |
- |
- |
Q 4 |
Q 3 |
Современные инновации, системы и технологии // (сс) ® 2023; 3(2) Modern Innovations, Systems and Technologies
Q 4 - - Q 5 Q 4
Q 5 Q 1 Q 2 Q 5 Q 4 Q 3
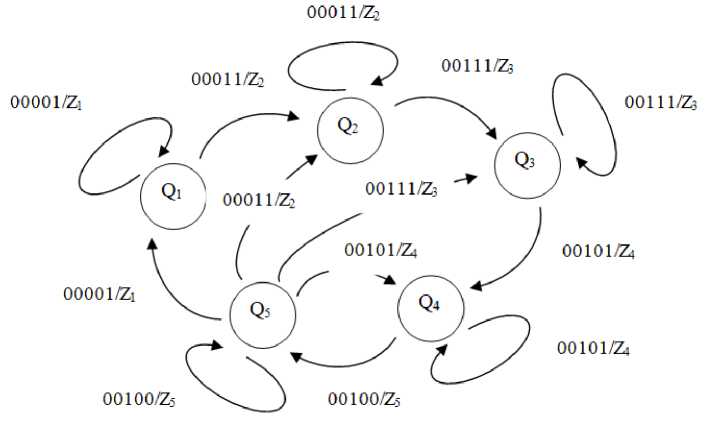
Рисунок 3. Граф автомата проектируемого контроллера.
Figure 3. Automaton graph of the designed controller.
ПРЕОБРАЗОВАНИЕ ГРАФА АВТОМАТА В СХЕМУ АЛГОРИТМА
При отображении графа-автомата на блок-схему алгоритма, последняя должна отображать важную особенность. Алгоритм конструируется таким образом, чтобы МП-система непрерывно тестировала входные воздействия и принимала решение о формировании выходного вектора и переходе в иное состояние (рисунок 4).
Программное решение участка алгоритма, обеспечивающего условный переход
Анализируя полученный алгоритм работы проектируемого контроллера, следует отметить наличие множества условных переходов. Логика работы контроллера предполагает аппаратный вызов подпрограмм. Таким образом, содержимое входного порта необходимо сравнить с ключом (программной константой), и в результате сравнения происходит либо вызов соответствующей подпрограммы, либо новый условный переход, т.е. сравнение с новой программной константой.
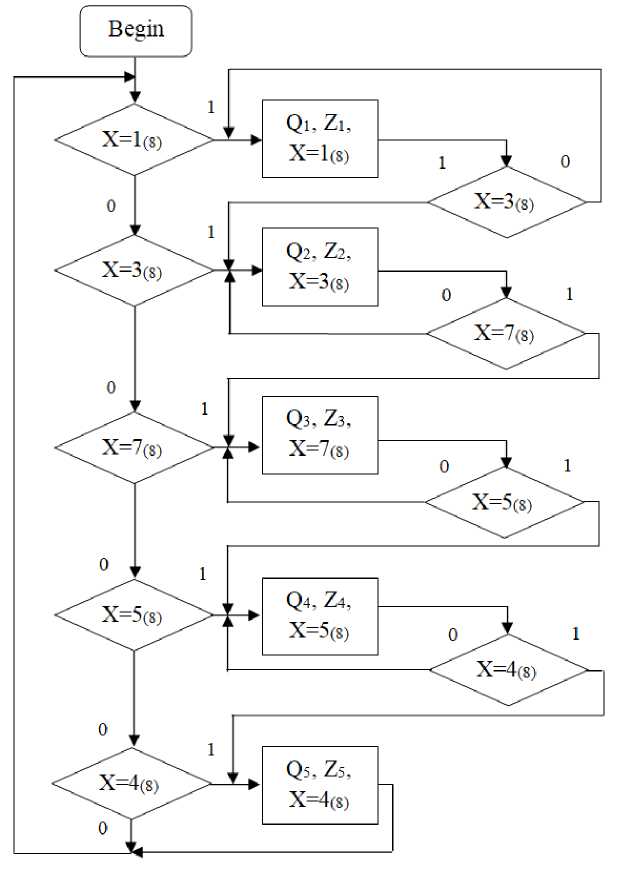
Рисунок 4. Блок-схема алгоритма работы проектируемого контроллера.
Figure 4. Block diagram of the operation algorithm of the designed controller.
В качестве конкретного примера реализации процедуры сравнения рассмотрим систему команд (MPASM) микроконтроллера PIC16F84 (листинг, иллюстрирующий программный код, обеспечивающий процедуру условного сравнения, представлен ниже) [9].
|
1. MOVF PORTA,0 |
// пересылка содержимого PORTA в регистр W; |
|
2. XORLW B’00100’ |
// операция логического сравнения XOR содержимого регистра W и программной константы; |
|
3. BTFSC STATUS,Z |
// переход по условию, т.е. результату сравнения: на строку 4 при наличии флага нуля (Z) или на строку 5 при отсутствии флага нуля (Z); |
-
4. CALL PROG1 // вызов подпрограммы PROG1;
5. MOVF PORTA,0
// пересылка содержимого PORTA в регистр W для
обеспечения следующего условного перехода.
РЕАЛИЗАЦИЯ ПРОТОТИПА
Поскольку завершающим этапом разработки микропроцессорной системы, согласно рисунку 1, является реализация прототипа, то рассмотрим принципиальную электрическую схему проектируемого контроллера, которая обеспечивает его реализацию (рисунок 5).
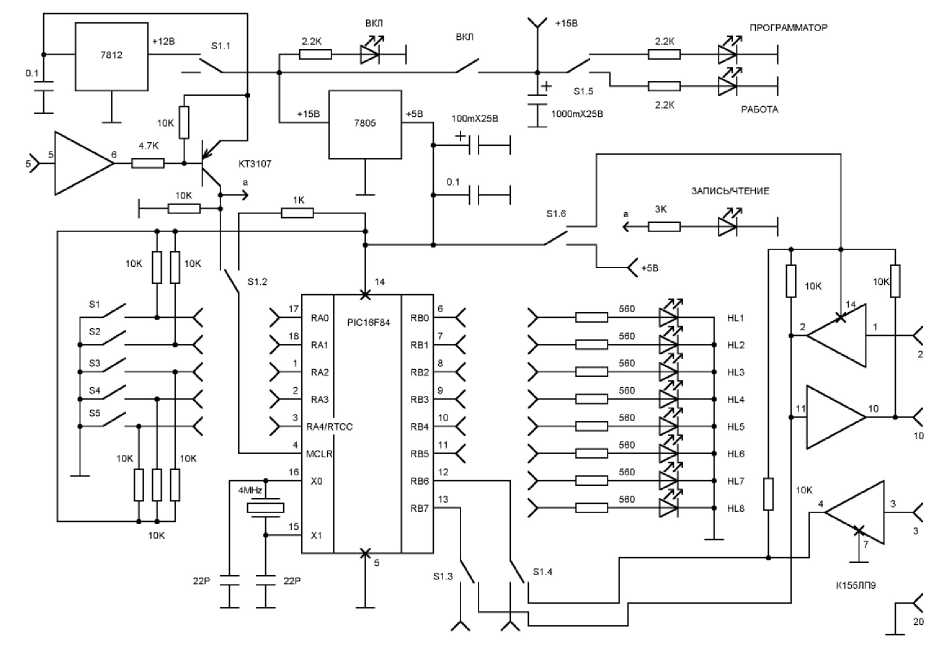
Рисунок 5. Принципиальная электрическая схема проектируемого контроллера на базе микропроцессорной системы.
Figure 5. Schematic diagram of the designed controller based on the microprocessor system.
Базовым узлом схемы выступает микроконтроллер PIC16F84, который и имеет два порта ввода/вывода: PORTA (RA0-RA4) и PORTB (RB0-RB7). В качестве устройства ввода данный выступает двухпозиционный переключатель S1-S5, в качестве устройства вывода применяется линейка светодиодов HL1- HL7, что позволяет диспетчеру, сопровождающему объект управления, осуществлять управление режимами работы объекта и видеть результаты работы соответствующих подпрограмм.
ЗАКЛЮЧЕНИЕ
Применение формализованного подхода к разработке программно-аппаратных комплексов на базе микропроцессорных устройств систематизирует набор и этапность действий, связанных с изучением принципов построения и структурно-функциональных особенностей проектируемых систем, областей применения современных микропроцессоров и микроконтроллеров, а также их использования и практического применения в автоматизированных системах обработки и управления данными. Развитие методологии формализованного проектирования микропроцессорных систем способствует их полнофункциональному использованию с обеспечением человекомашинного взаимодействия.
