Формирование образа маркера для автономного относительного ориентирования в ближней зоне

Автор: Сай Сергей Владимирович, Чемерис Денис Сергеевич
Журнал: Космические аппараты и технологии.
Рубрика: Информационные технологии
Статья в выпуске: 1 (3), 2013 года.
Бесплатный доступ
Описывается процесс формирования структуры образа искусственного маркера для решения задачи определения параметров относительного положения робототехнического объекта на примере автономного не- обитаемого подводного аппарата, с применением методов цифровой обработки изображений и распознавания образов. Для учета инвариантных свойств перспективной группы геометрических трансформаций выполняется компьютерное моделирование с целью определить наиболее оптимальный базовый элемент структуры маркера. Результаты моделирования позволят перейти к процессу формирования оптимального образа искусственного маркера.
Цифровая обработка изображений, образ искусственного маркера, распознавание образов, инвариантные свойства, коэффициент двойного отношения
Короткий адрес: https://sciup.org/14117289
IDR: 14117289 | УДК: 004.932.2
The image of marker for autonomous relative orientation in near field
The process of forming of image for artificial marker structure for solving a problem of robot relative position parameters determining, on example of an autonomous unmanned underwater vehicles, using the methods of digital image processing and pattern recognition is described. To account for invariant properties of projective group of transformations on the image plane performed computer simulations to determine the optimal structure of a basic element of the token. The simulation results to move to the process of creating the optimal way of artificial marker.
Текст научной статьи Формирование образа маркера для автономного относительного ориентирования в ближней зоне
Одним из перспективных и активно развивающихся направлений современной науки является исследование Мирового океана с применением автономных необитаемых подводных аппаратов (АНПА). Выполнение широкого круга задач с помощью АНПА сопряжено с их длительным пребыванием под
водой. Время пребывания АНПА под водой ограничено в силу ограниченности запаса энергоресурсов. Одним из решений данной проблемы является разработка методов автономного наведения АНПА для стыковки к док-станции с целью подзарядки аккумуляторов и выполнения информационного обмена. Процесс автоматического наведения заключается в выполнении двух этапов: получения
С. В. Сай, Д. С. Чемерис
Нейросетевой подход к мониторингу состояния промышленных роботов-манипуляторов значений параметров относительного положения (ПОП) и формирования команд системе управления АНПА для коррекции траектории наведения. К ПОП в данном случае относятся такие параметры, как дальность, курс, крен и дифферент.
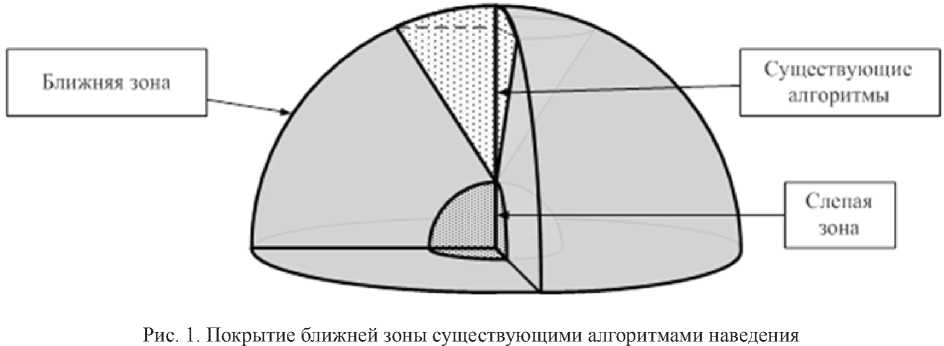
Известны различные способы получения значений ПОП АНПА: использование электромагнетизма [1], акустические [2; 3] и визуальные методы [4; 5]. В силу того, что одним из наиболее емких источников информации под водой являются видеоизображения, АНПА почти всегда оснащены видеокамерой. По этой причине наибольший интерес вызывают методы визуального получения значений ПОП, основанные на цифровой обработке изображений и распознавании образов. Чаще всего применяются те алгоритмы, которые используют известный образ маркера. Анализируя работы [4; 5], можно сделать вывод о том, что представленные алгоритмы определения параметров ПОП не учитывают инвариантные свойства перспективной группы геометрических трансформаций (ПГГТ), что накладывает ряд ограничений. Отклонение положения камеры от параллельного расположения относительно сцены более чем на ~10º [4] приводит к полному отказу алгоритмов распознавания. Как это представлено на рис. 1, существующие алгоритмы позволяют распознавать образ маркера только в ~ 8 % возможных положений.
Задача, решаемая в данной работе, заключается в расширении области возможных положений камеры в ближней зоне за счет определения базового элемента структуры маркер для распознавания с учетом инвариантов ПГГТ. Любое изображение, полученное с видеокамеры, является результатом центральной проекции на плоскость, поэтому необходимо учитывать инварианты ПГГТ при построении образа маркера. Фундаментальным инвариантом, как указано в [6], служит коэффициент двойного отношения (КДО). 57
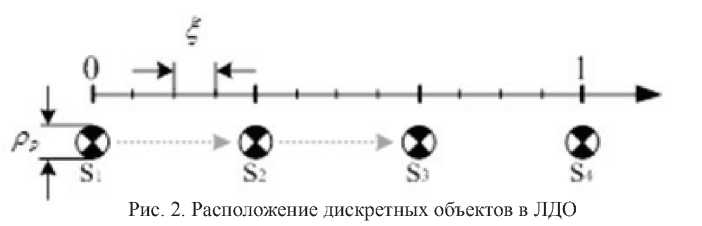
Последовательность из четырех дискретных объектов, показанную на рис. 2, назовем линейкой дискретных объектов (ЛДО).
Допустим, что дискретные объекты расположены на отрезке единичной длины, а крайние объекты S1 и S4 попадают соответственно на начало и конец отрезка. Таким образом, конфигурация зависит от положения S2 и S3. Для получения всех положений S2 и S3 зададим шаг ξ, который зависит от параметра ρ P , характеризующего физический размер дискретного объекта и его расположение в ЛДО.
Основным критерием при выборе оптимальной конфигурации ЛДО является коэффициент промахов М , представленный соотношением
M = m (p I ) N .100%,
ИССЛЕДОВАНИЯ
HAVKO____________
Ж ГРАДА где N- общее число возможных положений камеры в ближней зоне; т(ρI) – число положений камеры в ближней зоне, с которых определение КДО ЛДО не представляется возможным; ρI – параметр, учитывающий минимальное расстояние между соседними проекциями в плоскости I, при котором возможно определение КДО ЛДО. Оптимальная конфигурация ЛДО, с точки зрения распознавания на изображении, соответствует минимальному значению M.
Другим параметром является модуль от- 58 клонения η P , вычисленного для конфигурации
ЛДО в плоскости сцены Р , от η I , полученного проецированием ЛДО на плоскость изображения I .
ε = |η P – η I |.
Для каждой конфигурации ЛДО наибольший интерес представляет максимальное значение emax, показывающее, в каких пределах следует считать, что вычисленное значение η I соответствует η P . При равных значениях M у нескольких конфигураций ЛДО критерием выбора оптимального является меньшее значение £max. Построим графики зависимости величины M при следующих диапазонах значений параметров системы: курс ф = { n е N | n < 90 } град.; дифферент ф = { n е N | n < 90 } град.; дистанция d = { n е N | n < 20 } м; угол обзора камеры а = 90°; фокусное расстояние камеры f = 45 мм; разрешение изображения H×W= 1000×1000 пикс.; длина ЛДО L = 1,5 м; параметр ρ I = 10 пикс. и параметр ρ P = 5 см.
Результаты моделирования представлены на рис. 3 в виде графика, отображающего зависимость значения коэффициента M от дальности d.
№ 1 (3) январь-март 2013
По результатам моделирования в качестве базового элемента маркера выбран ηб = 1,333, при этом εбmax = 0,15, а значение коэффициента M < 1 %. Следующим этапом станет формирование образа искусственного маркера.
Список литературы Формирование образа маркера для автономного относительного ориентирования в ближней зоне
- Feezor M. D., Yates Sorrell F., Blankinship P. R., Bellingham J. G. Autonomous underwater vehicle homingdocking via electromagnetic guidance // IEEE Journal of Oceanic Engineering. 2001. № 26. С. 515-521.
- Stokey R., Allen B., Austin T., Goldsborough R., Forrester N., Purcell M., von Alt C. Enabling technologies for REMUS docking: an integral component of an autonomous ocean-sampling network // IEEE Journal of Oceanic Engineering. 2001. № 26. С. 487-497.
- Stokey R., Purcell M., Forrester N., Austin T., Goldsborough R., Allen B., von Alt C. A docking system for REMUS, an autonomous underwater vehicle // OCEANS 1997. 1997. № 2. С. 1132-1136.
- Борейко А. А., Воронцов А. В., Кушнерик А. А., Щербатюк А. Ф. Алгоритмы обработки видеоизображений для решения некоторых задач управления и навигации автономных необитаемых подводных аппаратов // Подвод. исследования и робототехника. Владивосток, 2010. C. 29-39.
- Чемерис Д. С., Бурдинский И. Н. Определение относительного положения на основе обработки видеоизображений // Цифровая обработка сигналов. 2010. № 2. C. 57-59.
- Hartley R., Zisserman A. Multiple View Geometry in Computer Vision. 2-е изд. New York: Cambridge University Press, 2004. 655 с.
