Формирование траекторий в механизмах с параллельной кинематической структурой

Автор: Смирнов Владимир Алексеевич, Петрова Лина Николаевна, Федоров Виктор Борисович
Рубрика: Расчет и конструирование
Статья в выпуске: 11 (66), 2006 года.
Бесплатный доступ
На основе анализа простейшего механизма с параллельной кинематической структурой показаны особенности решения траекторных задач для подобных механизмов и представлен алгоритм аппроксимации требуемой траектории сегментами кривых.
Короткий адрес: https://sciup.org/147151382
IDR: 147151382 | УДК: 621.865.8
Текст научной статьи Формирование траекторий в механизмах с параллельной кинематической структурой
Рассмотрим плоский механизм, показанный на рис. 1, а. Механизм состоит из трех поворотных шарниров и двух раздвижных штанг, длины которых ЬАВ и ЬАС могут меняться при помощи соответствующих приводов. Выходным элементом механизма является центр шарнир А (далее - точка А). Так как передача энергии от приводов к выходному звену осуществляется параллельно (через раздвижные штанги), то данный механизм можно отнести к классу механизмов с параллельной кинематической структурой. Простота механизма позволяет достаточно легко выявить особенности этих механизмов, влияющие на решение задачи формирования требуемой траектории выходного звена.
А’
а) б)
Рис. 1
В качестве управляющих координат в этом механизме выступают длины LAB и ЬАС, которые могут рассматриваться как обобщенные Z-координаты. Такие координаты широко используются при описании механизмов с параллельной кинематической структурой [1-3]. Если известны декартовые координаты (Хв, YB), (Хс, Yc) центров шарниров В и С в некоторой системе координат OXY, то /-координаты механизма, соответствующие положению центра шарнира А в точке с координатами (ХА, YA) определяются следующими зависимостями:
Lab Lac = ^(ХА-Хс)2 +(Ya - Yc)2 . (1)
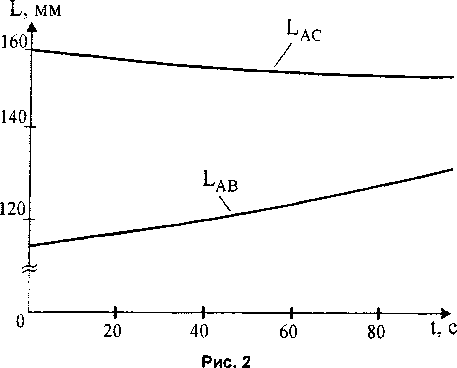
Выражения (1) позволяют решить для этого механизма обратную задачу кинематики: определить значения управляющих координат по известным координатам выходного звена. Иными словами, с использованием этих выражений можно сформировать такое управление приводами штанг, которое обеспечит движение выходного звена механизма по требуемой траектории с требуемой точностью. На рис. 2 показан результат решения обратной задачи для механизма с Хв = 0, YB =0 (начало системы координат совмещено с центром шарнира В), Хс -100мм, Yc =-50 мм . Точка А должна, равномерно двигаясь по прямой линии, перейти за 100 с из начальной точки с координатами (55, 100) в точку (85, 100). Из рис. 2 видно, что требуемый линейный закон изменения координат выходного звена обеспечивается при нелинейных законах изменения управляющих /-координат. Это положение обусловлено нелинейной связью декартовых и /-координат (1); оно справедливо и для более сложных механизмов с параллельной кинематической структурой [4].
Нелинейная связь декартовых и Z-координат ведет к тому, что для формирования одинаковых траекторий, имеющих различные начальные точки, требуется обеспечить разные законы изменения /-координат. Для иллюстрации этой особенности механизмов с параллельной кинематической структурой на рис. 3, а показан результат моделирования законов изменения /-координат для случая движения точки А по прямой линии из точки с координатами (55, 100) в точку (85, 100); на рис. 3, б - для случая движения точки А по прямой линии из точки с координатами (65, 100) в точку (95, 100). Как видно из рисунков, формирование одной и той же траектории - отрезка длиной 30 мм, требует изменения длин штанг по разным законам.
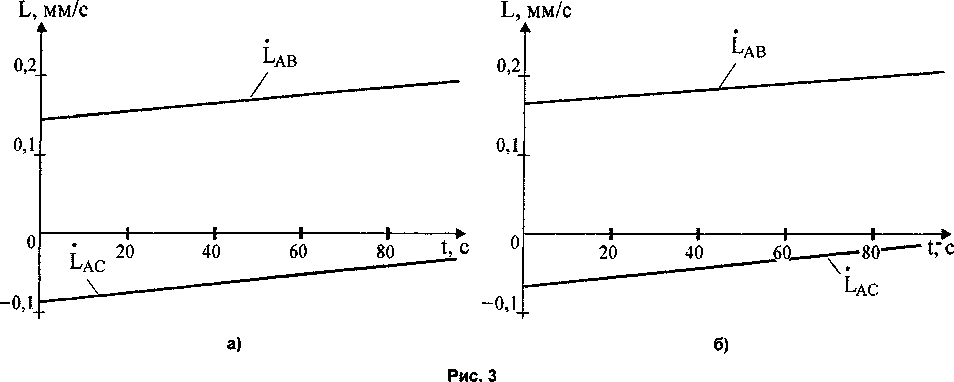
Обеспечить изменение /-координат по требуемому нелинейному закону достаточно сложно, так как при этом требуется непрерывное изменение скорости приводов, изменяющих длины штанг (см. рис. 3). Рассмотрим вопрос замены нелинейных законов изменения /-координат кусочнолинейными (с кусочно-постоянными законами изменения скоростей приводов) и определим, как в этом случае будет двигаться точка А механизма.
Для определения характера движения точки А при заданном законе изменения длин штанг необходимо решить прямую задачу кинематики. Решение этой задачи сводится к разрешению системы уравнений (1) относительно переменных ХА и УА. Выполнение этой операции наталкивается на трудности, связанные с неоднозначностью решения прямой задачи для механизмов с параллельной кинематической структурой [1]. На рис. 1, б показаны два состояния рассматриваемого механизма, для которых значения /-координат одинаковы, однако декартовы координаты точек А и А' существенно разнятся.
Решение прямой задачи для рассматриваемого механизма можно упростить, если поместить один из шарниров, например, шарнир В, в начало декартовой системы координат. В этом случае
Расчет и конструирование

Подставив выражение (2) во второе уравнение (1), получим уравнение относительно YA:

которое после преобразований сводится к квадратному уравнению k1YA2+k2YA+k3=0, (3)
где k! = ХС2 + Yc2;
ь _ у к 2 т 2_v2_v2|- к2 - icp^AC lab лс J’ kз - ~ [lac2 Yc2 - (Lab - Xc)2 ] [tAC2 - Yc2 - (t AB + Xc )2 ].
Уравнение (3) дает два значения для координаты YA, соответствующей заданным /-координатам Ьдд и LAC. Для каждой из этих координат YA уравнение (2) дает еще по две координаты ХА . Однако только две пары координат (ХА, YA) удовлетворяют уравнениям (1). Эти координаты и будут являться решением прямой задачи. Введением дополнительного условия, накладывающего ограничения на положение точки А, можно выделить только одно решение прямой задачи. Для рассматриваемого механизма можно принять, что точка А должна находиться выше линии, соединяющей центры шарниров В и С.
На рис. 4 показаны результаты решения прямой задачи для рассматриваемого механизма. При моделировании принято, что длины штанг изменяются равномерно в интервалах: Едз - от 110 мм до 130 мм, ЬАС - от 170 мм до 120 мм. Анализ уравнений (1)-(3) показывает, что при линейно изменяющихся /-координатах декартовые координаты точки А описываются квадратичными функциями относительно параметра t, что иллюстрирует рис. 4, а. Вид кривой, описываемой точкой А на плоскости, показан на рис. 4, б. Данная кривая также является квадратичной [5].
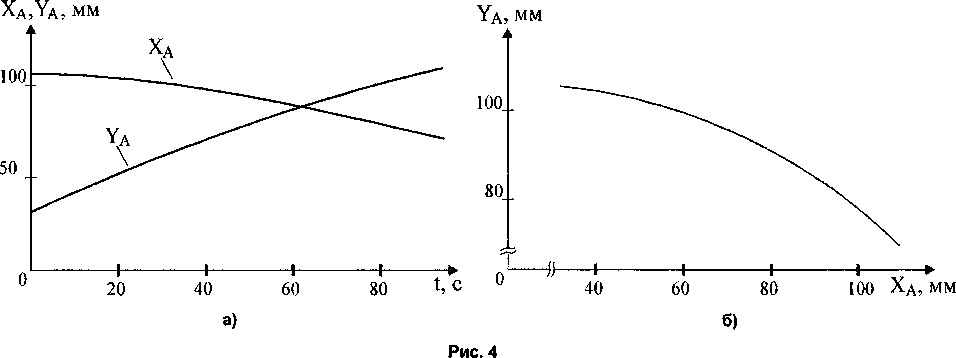
При использовании механизма, показанного на рис. 1,а, для выполнения технологических операций, необходимо обеспечить движение его точки А по требуемой траектории с требуемой скоростью. Если на управление механизмом налагается требование кусочно-линейного изменения /-координат, то необходимо решить задачу замены (аппроксимации) требуемой траектории движения точки А линией, состоящей из сегментов квадратичных кривых, показанных на рис. 4, б. Рассмотрим один из вариантов решения этой задачи.
Примем, что:
-
• приводы, обеспечивающие изменение длин штанг, имеют точность позиционирования Ап ;
-
• при работе приводов отклонение точки А от требуемой траектории не должно превышать величины точности позиционирования приводов Ап;
-
• количество линейных участков, аппроксимирующих нелинейные законы изменения /-координат, должно быть минимальным.
Пусть требуется осуществить перемещение точки А из начальной точки (Х^ УАН). В некоторый момент времени t точка А должна лежать на требуемой траектории и иметь координаты (XAt YAt). Однако в силу конечной точности приводов, обеспечивающих изменение длин штанг, действительные координаты точки А будут отличаться от требуемых координат (XAt YAt). Для данного момента времени t можно определить 9 возможных положений точки А (рис. 5), соответствующих целому количеству дискрет приводов Ап . Положение (0,0) соответствует такому состоянию механизма, когда координаты точки А минимально отличаются от требуемых. Остальные положения соответствуют отклонениям приводов на одну дискрету от положения (0,0). В дальнейшем должны рассматриваться только те возможные положения, которые отстоят от требуемой траектории на величину, не превышающую Ап . На рис. 5 из даль-
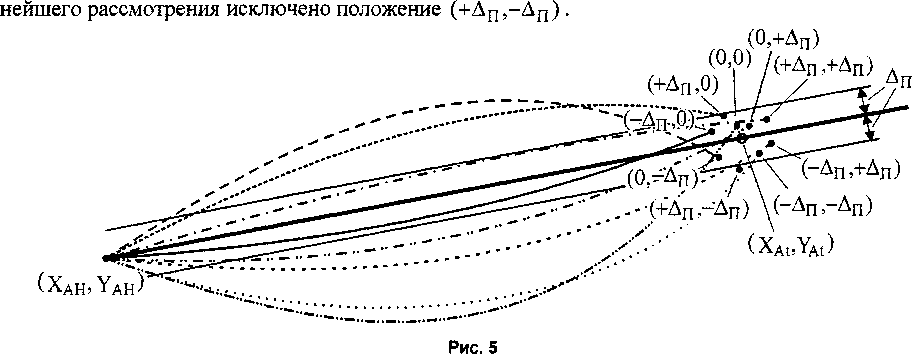
Для каждого из возможных положений необходимо существует единственный закон линейного изменения длин штанг, обеспечивающий переход в это положение из начального. Этому закону будет соответствовать некоторая квадратичная траектория движения точки А (см. рис. 5). Среди всех возможных положений точки А в момент t необходимо найти такое, для которого траектория движения точки А отличается в любой момент времени от требуемой на величину, не превышающую Ап :
|§(т)| < Ап, V т е [О, t]. (4)
Кроме того, можно потребовать минимальность интегрального отклонения t
J|8(T)|dT —> min. (5)
о
Отклонение 5(т) должно определяться как расстояние от текущего положения точки А до требуемой траектории. Задача существенно упрощается, если требуемая траектория задана аналитически. На рис. 5 оптимальная траектория соответствует положению (-Ап,0) . Найденное положение будет являться начальным для определения следующего участка линейного закона изменения длин штанг.
Таким образом, задача замены требуемой траектории линией, состоящей из сегментов квадратичных кривых, сводится к задаче последовательного нахождения интервалов максимальной длительности tMAX, для которых выполняются условия (4) и (5) хотя бы для одного из возможных положений, соответствующих конечному на интервале моменту времени t. Если условие (4) выполняется только для одного из возможных положений, то условие (5) можно не рассматривать. Максимальность длительности интервалов обеспечит их минимальное количество.
Нахождение максимальной длительности одного из интервалов можно рассматривать как решение задачи динамического программирования [6] с нефиксированным конечным моментом
Расчет и конструирование
(так как длительность t^^ неизвестна) и подвижным правым концом (так как в каждый из моментов времени t точка А может принимать только фиксированные положения).
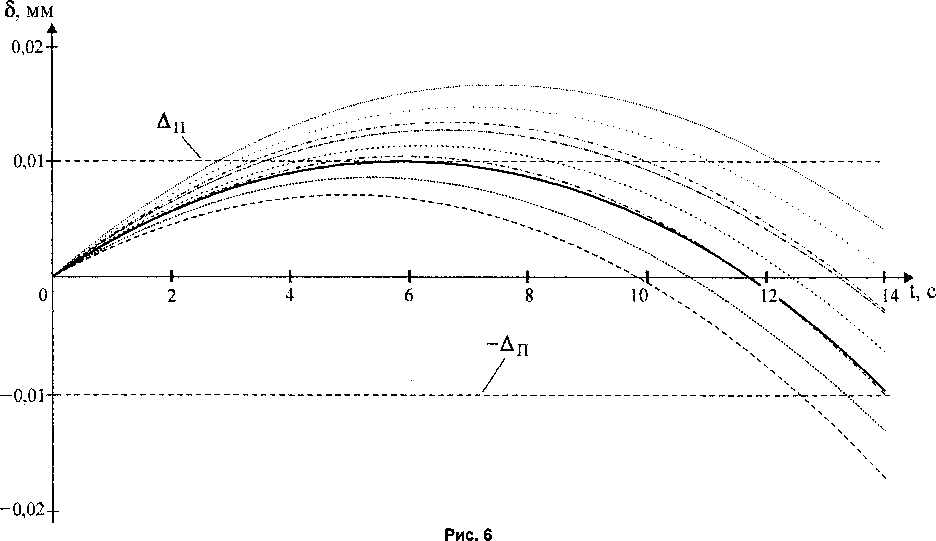
На рис. 6 показаны результаты поиска длительности первого интервала, обеспечивающего приближение реальной траектории точки А механизма к требуемой. Конечной точкой интервала будет являться такое возможное положение механизма, соответствующее положению точки А на требуемой траектории в момент времени t = 14 с, для которого отклонение привода штанги АВ составляет «- Дп », а отклонение привода штанги АС равно нулю. Величина Дп = 0,01 мм.
При выполнении поиска контролировалось ограничение (4), отклонение полученной траектории от требуемой показано сплошной линией.
Найденное положение будет являться начальным для следующего интервала.
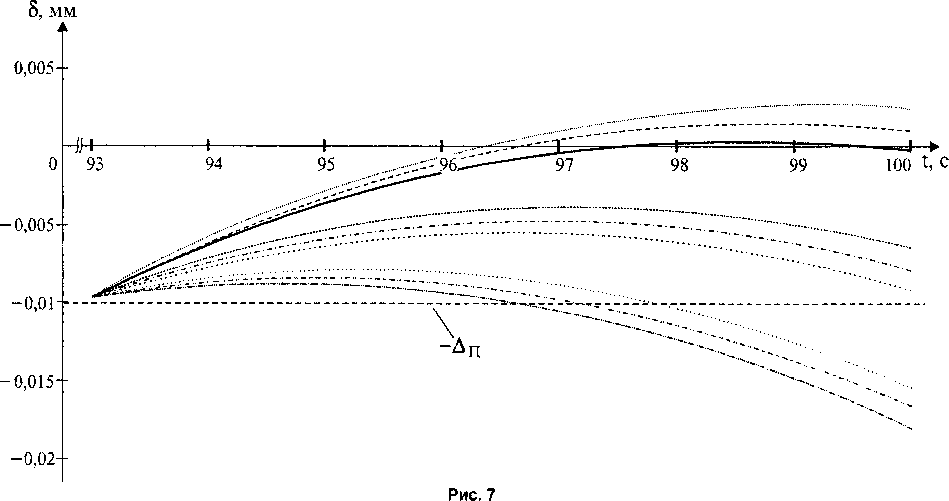
На рис. 7 показан результат решения аналогичной задачи для последнего интервала. В этом случае реальная траектория выбирается из условия минимального отклонения от требуемой в конечной точке.
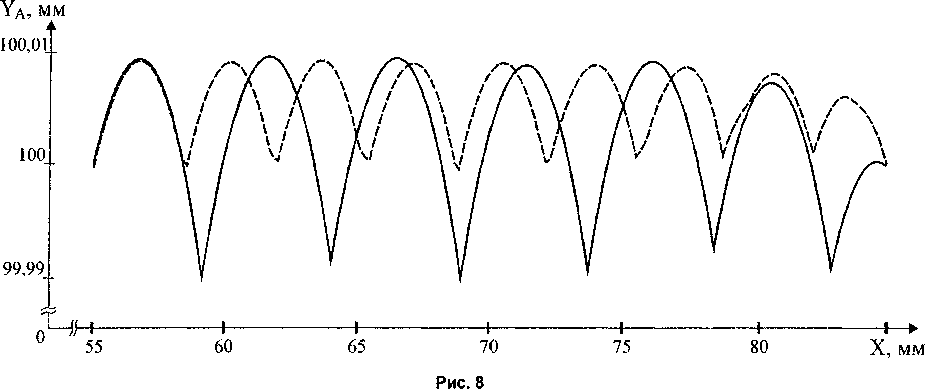
На рис. 8 сплошной линией показаны результаты моделирования движения точки А из начальной точки с координатами (55, 100) в точку (85, 100). Требуемая траектория движения - прямая линия. Полученная траектория имеет 7 участков, на каждом из которых Z-координаты изменяются линейно, и отличается от требуемой не более чем на 0,01 мм.
Для сравнения (пунктирная линия на рис. 8) приведена траектория движения точки А, полученная с использованием управления, описанного в [7]. В этом случае траектория имеет 14 участков линейного изменения /-координат; среднеквадратичное отклонение этой траектории от требуемой на 10% больше, чем для траектории, показанной сплошной линией.
Предложенный алгоритм формирования траектории, близкой к требуемой, может быть реализован и в более сложных механизмах с параллельной кинематической структурой.
Список литературы Формирование траекторий в механизмах с параллельной кинематической структурой
- Манипуляционные системы роботов/А.И. Корендясев, Б.Л. Саламандра, Л.И. Тывес и др.; Под общ. ред. А.И. Корендясева. -М.: Машиностроение, 1989. -472 с.
- Обрабатывающее оборудование нового поколения. Концепция проектирования/В.Л. Афонин, А.Ф. Крайнов, В.Е. Ковалев и др.; Под ред. В.Л. Афонина. -М.: Машиностроение, 2001.-256 с.
- Пространственные механизмы параллельной структуры/В.А. Глазунов, А.Ш. Колискор, А.Ф. Крайнев. -М.: Наука, 1991. -95 с.
- Смирнов В.А., Тверской М.М. Математическая модель трехкоординатного манипулятора с параллельной кинематической структурой//Вестник ЮУрГУ. Серия «Машиностроение». -2005. -Выпуск 7. -№ 14(54). -С. 19-22.
- Фокс А., Пратт М. Вычислительная геометрия. Применение в проектировании и на производстве: Пер. с англ. -М.: Мир, 1982. -304 с.
- Габасов Р., Кириллова Ф. М. Основы динамического программирования. -Минск: Изд-во БГУ им. В.И. Ленина, 1975. -264 с.
- Смирнов В.А., Федоров В.Б. Алгоритм управления механизмом с параллельной кинематической структурой//Вестник ЮУрГУ. Серия «Машиностроение». -2005. -Выпуск 7. -№ 14(54). -С. 23-26.
