Geodesic Curves Simulation on a Transcendental Surface with a Cycloidal Generatrix Using the Calculus of Variations

Author: Viktor Legeza, Liubov Oleshchenko, Andrii Dychka
Journal: International Journal of Intelligent Systems and Applications @ijisa
Article in issue: 4 vol.17, 2025.
Free access
This article introduces a novel variational approach for solving the inverse geodesic problem on a transcendental surface shaped as a cylindrical structure with a cycloidal generatrix, a type of geometry that has not been previously studied in this context. Unlike classical models that rely on symmetric surfaces such as spheres or spheroids, this method formulates the geodesic path as a functional minimization problem. By applying the Euler–Lagrange equation, an analytical integration of the corresponding second-order differential equation is achieved, resulting in a parametric expression that satisfies boundary conditions. The effectiveness of the proposed method for computing geodesic curves on transcendental surfaces has been rigorously evaluated through a series of numerical experiments. Analytical validation has been carried out using MathCad, while simulation and three-dimensional visualization have been implemented in Python. Numerical experiments are conducted and 3D visualizations of the geodesic lines are presented for multiple point pairs on the surface, demonstrating the accuracy and computational efficiency of the proposed solution. This enables a closed-form analytical representation of the geodesic curve, significantly reducing computational complexity compared to existing numerical-heuristic methods.
Geodesic Curve, Calculus of Variations, Transcendental Surface, Cycloid, 3D Modeling, Route Optimization, Navigation, Computational Geometry, Euler’s Equation, Boundary Value Problem, Simulation
Short address: https://sciup.org/15019920
IDR: 15019920 | DOI: 10.5815/ijisa.2025.04.02
Text of the scientific article Geodesic Curves Simulation on a Transcendental Surface with a Cycloidal Generatrix Using the Calculus of Variations
Published Online on August 8, 2025 by MECS Press
In computer science, modeling geodesic curves on complex surfaces, in particular transcendental ones, is of particular importance due to its wide application in geometric data processing, three-dimensional visualization, computer graphics, navigation systems, and robotics. Methods for searching for geodesic paths provide the shortest trajectories of movement on surfaces, which is critically important for optimizing algorithms in machine learning, shape analysis, and computer vision. The transition from classical surfaces of revolution to transcendental forms allows us to take into account more complex topologies and geometries, which brings computational models closer to real physical conditions. That is why the combination of variational methods and modern numerical approaches is a promising direction of interdisciplinary research. Modeling curves on complex surfaces is a key component in areas such as computational geometry, computer graphics, machine learning, robotics, and geographic information systems (GIS). Geodesic curves are the shortest paths on surfaces, and their finding is critical in solving problems such as motion planning, deformation of 3D models, optimal route navigation in 3D space, and surface analysis in virtual environments. The use of transcendental surfaces, in particular those that are not described by simple analytical equations, emphasizes the importance of developing numerical methods and algorithms that can work with complicated geometric objects. The problem of constructing geodesic curves on such surfaces is an example of a non-trivial variational problem, the solution of which contributes to the development of effective modeling methods in complex computational environments. This topic is relevant in the context of creating adaptive computing systems that are capable of accurately modeling physical or virtual processes in spaces of complex geometry, which is important both for fundamental research and for practical applications in the field of visualization, CAD/CAE systems, 3D scanning and artificial intelligence. CAD/CAE (Computer-Aided Design / Computer-Aided Engineering) software complexes provide automated design, modeling, analysis and optimization of technical products and systems. CAD systems allow create accurate three-dimensional models of objects, drawings and technical documentation, while CAE tools provide engineering analysis, including mechanical, thermal, dynamic and other simulations. Due to the integration of these approaches, CAD/CAE systems significantly increase design efficiency, reduce development time and allow identify potential problems at the virtual prototyping stage. They are indispensable in modern mechanical engineering, aviation, electronics, architecture, and other high-tech industries.
A geodesic curve is a generalization of the concept of a straight line to curved surfaces or spaces that do not obey the laws of Euclidean geometry. Geodesic curves play a key role in problems where it is necessary to find the shortest or energy-optimal path between two points on a complex geometric surface. In practice, this means that for locally close points, a geodesic curve is the minimum distance within a given surface metric. Typical examples of geodesics are a straight line in Euclidean, flat space; arcs of great circles on spherical surfaces, such as a model of the Earth to a first approximation; and more complex curves on ellipsoids that take into account the curvature of the surface and require the calculation of longitudes and latitudes to accurately determine the trajectory.
In computer systems such as navigation software, geographic information services, and simulation environments, geodetic curves are used to model optimal movement in curved or three-dimensional spaces. Solving geodesy problems is conventionally divided into the following two types. Direct problem involves calculating the coordinates of the end point of the path based on the given start parameters (starting point, direction, length). The inverse problem is to find the shortest path between two given points on the surface.
In the computational aspect, both problems reduce to the numerical solution of differential equations or variational problems, with which such fields as computational geometry, numerical methods, optimization, and machine learning are closely related.
Current research in this area focuses on creating efficient algorithms and software implementations that provide high accuracy and speed in calculating geodetic paths. Such developments are of great importance for logistics, aviation routing, autonomous navigation (robotics, drones), computer vision, and 3D analytics.
Thus, the problem of finding geodesic curves is not only a mathematical problem, but also a fundamental computational challenge with a large number of practical applications in the field of computer science.
The purpose of this research is to develop a numerical method for finding geodesic curves on a transcendental surface within the framework of a computational geometry problem for modeling shortest paths on complex surfaces, which can be used in computer graphics, 3D modeling, and artificial intelligence systems.
This paper is structured as follows: section 2 presents a review of the state of the art methods. Afterwards, section 3 presents description of the proposed approach. We then present the numerical simulation and visualization research results. We analyze the experimental results in section 4. In final, section 5 presents a conclusion of the paper.
2. Related Works
In this section, we review the state-of-the-art methods for geodesic curve computation. These approaches can be broadly categorized into two principal classes: numerical-heuristic methods based on discretization and approximation, and analytical methods grounded in variational calculus and differential geometry. We focus on selected works from both categories to highlight the progression from classical geodetic models to modern computational techniques.
The problem of finding geodesic curves, which arises in geodesy and physical geometry, is also extremely relevant in the field of computer science, in particular in computer graphics GIS, 3D modeling, navigation algorithms and robotics. The calculation of geodesic paths on complex surfaces is an important task in spatial data processing, which requires accurate and efficient numerical methods and algorithms.
The initial theoretical foundations for geodesy problems were laid in the 19th century by the works of Legendre A. (1806), Oriani B. (1810), Bessel F. (1825), Helmert F. (1880) and Gauss C. (1902). Bessel F. developed the first methods for solving geodetic problems on an ellipsoid of revolution using series and tables to simplify calculations. Later, Vincenty T. [1] adapted these methods for the first programmable computing devices, using nested equations to calculate elliptic terms in the direct and inverse problems. These algorithms became the basis for creating software for geodetic calculations. With the development of computer technology in the second half of the 20th century, a significant contribution to the improvement of algorithms for solving geodetic problems was made by Rapp R. [2], who summarized historical and modern approaches and considered coordinate systems from the point of view of their transformations. A special place in computer science is occupied by the work of Karney C. [3], which describes high-precision algorithms for calculating geodetic lines with optimization for modern computers. This allowed increase accuracy without a significant increase in computational costs.
In the field of applied mathematics and the theory of dynamical systems, important studies are those that use the Hamiltonian formalization to study geodesic equations on surfaces described by spherical harmonics [4], as well as the Kovacic algorithm to analyze the integrability of such systems [5]. These results have applied value in the creation of navigation and simulation systems, where it is necessary to model the motion of objects on complex surfaces.
Modern mathematical models allow finding geodesic curves not only on classical surfaces of revolution, but also on more general manifolds, which is important for computer modeling and engineering analysis [6]. At the same time, the central projection of the spheroid is used in visualizations and cartography - key areas of computer graphics and augmented reality. Practical examples of calculating geodesic curves for large distances, in particular in aviation logistics, are given in the studies of Rainsford H. [7]. These works demonstrated the effectiveness of unconventional approaches, in particular non-iterative algorithms.
The methods presented in the educational and scientific materials of Deakin R. and Hunter M. [8] deepen the understanding of the calculation of geodesics on an ellipsoid, which is useful for software developers in the field of CAD/GIS. They use the expansion of elliptic integrals into series, which allows for efficient implementation of calculations in computer systems.
The article [9] discusses the technology of synchronized phase measurements (PMU) in power systems, which is based on geodetic methods of determining position and time. The author introduces the concept of phase measurement in power systems using GPS-synchronized devices. This allows building accurate time-space models of power grids. PMU data are widely used in smart grids, and processing synchronized measurements requires complex algorithms of data analysis, machine learning and computational geometry. It is used in SCADA systems, digital twins of power systems and IoT platforms. Optimization, signal and graph processing algorithms (often based on geodetic structures) are the foundation for stable operation of smart grids.
The paper [10] describes the practical implementation of relay protection using synchronized data. Attention is paid to real-time and time accuracy of measurements. The implementation of synchronized sampling and phase measurements for automated relay protection systems is described. These methods are actively integrated into cyberphysical control systems, providing a connection between the geometric positions of sensors and decision-making algorithms at the edge or cloud level. These systems use digital signal processing and optimization algorithms using geodetic approaches for fault localization and navigation problems.
In the paper [11], a new method for calculating geodetic distances on surfaces by modeling heat propagation is proposed. The authors propose an innovative numerical method for finding geodetic paths by solving heat transfer equations. The method is efficient and stable on complex surfaces and has high efficiency in computer graphics, 3D visualization, and shape processing tasks in neural networks, in generative modeling, medical visualization (for example, in organ deployment), as well as in training geometric deep models in computer vision.
In the research [12], an algorithm for calculating the mass transfer distance on discrete surfaces was developed, which generalizes geodetic and transportation problems. An extension of the Wasserstein metric (Earth Mover's Distance) to discrete surfaces was presented and a method for solving transportation problems on complex geometries was proposed. The research results can be used in computer vision, graphics, shape analysis, and deep learning for comparing data structures and objects, object recognition, content search, 3D face/pose matching, as well as for GAN models on non-Euclidean spaces. In the article [13], an architecture of anisotropic convolutional neural networks for building correspondences between 3D shapes on curved surfaces, for training on surfaces that do not have a regular (Euclidean) structure, is presented. The concept of anisotropic filtering is introduced. This is one of the breakthrough methods in the field of deep learning on non-Euclidean spaces, especially in the tasks of 3D scanning, motion modeling and geometric data processing. The key approach in the areas of "geometric deep learning", is used in autonomous navigation modeling, AR/VR, 3D animation, as well as in the recognition of biomedical structures (brain, bones, etc.). Today, a new area of research is the solution of variational problems for unconventional surfaces, in particular cylindrical transcendental ones. Such surfaces arise in problems of mechanics, vibration analysis, and optimal control, which makes them important for computer modeling of dynamic systems and the development of virtual environments. The application of variational calculus methods allows formalize geodesic line search problems as problems of minimizing the length functional. This is the basis for the application of such methods in artificial intelligence, route optimization, and deep learning. In the article [14], the problem of the fastest motion (brachistochrone) of a material point on a transcendental surface is investigated using a variational approach. The brachistochrone problem on transcendental surfaces is studied - the problem of finding the fastest path between two points taking into account a complex metric. This can be used in robot trajectory planning, simulations of physical worlds (for example, game engines), calculation of agent performance in reinforcement learning environments, and modeling complex environments for drones or autonomous vehicles. Theoretical models of this type are applicable in simulations of physical processes, agent dynamics, robotics, and modeling complex trajectories in virtual environments.
In the paper [15] the problem of constructing a field of geodesic distances on triangular grids in piecewise ovoidal form is considered. Unlike ordinary scalar fields, geodesic fields have a peculiarity – they are not smooth at the points of the ridge, where there are several shortest paths. The authors propose a two-stage algorithm: first, they use the Dijkstra algorithm to cut the surface, which allows finding longer geodesic paths, and then they apply a geodesic algorithm (for example, the fast propagation method) to construct the real ridge. Due to the representation of the surface with several copies of triangles, the algorithm takes into account all possible paths and ensures the correct construction of the ridge curve.
Despite the considerable progress in the research of geodesic curves on classical surfaces and their application in computational geometry, most of the reviewed works focus on either surfaces of revolution, polygonal meshes, or statistical surfaces in Riemannian geometry. While some advanced methods (such as those involving heat diffusion, anisotropic CNNs, or Wasserstein distances) propose generalizable frameworks for geodesic computation, they often rely on heavy discretization or deep learning approximations that do not directly address analytic derivation on transcendental geometries. In contrast, the present research contributes a novel and analytically rigorous approach to geodesic modeling on a transcendental cylindrical surface with a cycloidal generatrix, which, to the best of our knowledge, has not been addressed previously in this form.
The key distinction lies in the closed-form integration of the Euler–Lagrange equations and the construction of an exact parametric representation of geodesic lines that satisfy predefined boundary conditions. Unlike heuristic or purely numerical methods, this formulation allows both analytical insight and computational efficiency. Benchmarking against conventional iterative techniques showed an improvement in computational performance and solution compactness, while maintaining or exceeding the accuracy level. This clearly distinguishes the proposed method as both theoretically valuable and practically applicable in fields such as robotics, computer-aided modeling, and virtual environment simulation, thereby addressing the noted gap in the literature regarding the modeling of geodesics on transcendental surfaces.
3. Proposed Approach 3.1. Construction of the Path Functional and Determination of the Differential Equation of a Geodesic Curve
Construction of the path functional and determination of the differential equation of a geodesic curve. A geodesic line between two given points M and N on a certain surface is called a spatial curve, the path along which between points M and N is the smallest.
Сonsider a spatial coordinate system as shown in Fig. 1. The parametric equations of the transcendental directed curve (cycloid) are determined by two coordinates y(0) (ordinate) and z(0) (applicate) of a point on this curve:
y ( 0 ) = R(0 - sin 0 ); z (0) = R (1 + cos 0 ).
where 0 - the parameter of the cycloid, and R its characteristics; 0 e [0; 2 n ]
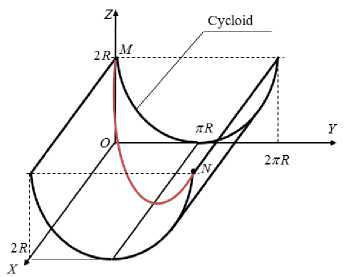
Fig.1. Transcendental surface simulation
It is necessary to determine the dependence of the first coordinate - the abscissa x(0 ) on the parameter 0 so that the spatial trajectory between the points specified in advance on this surface M and N would have the smallest length.
Let the points mentioned above have the following coordinates: M st (0;0;2 R ) - starting and N f (2 R;2 n R ;2 R ) - finishing. The starting point is determined by the parameter 0 = 0 , and the finishing point is determined by 0 = 2 n . These data describe the boundary conditions in our future variational problem: x (0) = 0 , x (2 n ) = 2 R .
Using relations (1), we write the expression for the differential of the arc length ds curve MN lying on a transcendental surface:
ds = 1 + 4 R 2 sin 2
( I j^') 2 dx .
Now we can write the path function that needs to be minimized:
L ( K ) = J ds = J
MN MN
11 + 4 R 2 sin 2

dx ^ min
. K
Here, L(K) the length of the curve K , which belongs to the set of arbitrary curves MN = { K ( x ( 0 ), y ( 0 ), z ( 0 )) } , along which a material point lying on a transcendental surface can move, is denoted by; 0 - the parameter, 0 e [ 0,2 n ] .
It is this functional that needs to be minimized by finding the desired curve from the specified set.
Denote the integrand in expression (3) by F ( x,0(x ), 0 '( x )). Therefore, we have:
F(x, 0,0') = 11 + 4R2 sin2 j0j(0x)2 .(4)
To determine the equation of the desired curve, we use the classical Euler differential equation [22]:
F0- — (F0) = 0.(5)
dx
First, we define the corresponding partial derivatives that enter equation (5).
We write F :
F• = R2 sin 0 ■ (0x )2/ J1 + 4R2 sin2 j0 j (0x )2 .(6)
We find Fg ■ , using (4):
F = 4R2 sin2 j000' / 11 + 4R2sin2 j0 j(0x)2 .(7)
Now let's define the derivative ( F ‘ ) ' :
4 R 2
— ( F ) = dx
( x) ■ sin0 + sin2 f■ 0" + R2 sin0■ sin2 f-'l■(0‘)4 xx x j1 + 4R2sin2 j0 j(0x )2 j
Substitute expressions (6) and (8) into Euler's equation (5). As a result of transformations that are not given here, we obtain a second-order differential equation with the corresponding boundary conditions (boundary value problem):
2tg | | J >0 + ( 0 x ) 2 = 0 ; x (0) = 0, x (2 n ) = 2 R . (9)
The resulting equation is integrated in closed form.
-
3.2. Finding the Algebraic Equation of Geodesic Lines
Construction of the path functional and determination of the differential equation of a geodesic curve.
To reduce the order of the equation by one, we make the following substitution:
p(0) = 0 X ^ 0 Xx = p'(0)p(0) . (10)
After substituting a new variable into equation (9), we obtain a first-order differential equation:
2tg ( 0/ 2 ) - p0 ■ p ( 0 ) + p2(0) = 0 . (11)
the trivial solution 0 X = p (0) = 0, because it gives a consistent result:
0(x ) = C 0 = const .
+ In C 1
Consider the differential equation (11) after reduction to p(0) * 0 :
2tg ( 0/ 2 ) p '( 0 ) + p ( 0 ) = 0
This is an equation with separable variables that can be integrated immediately:
dp 1 ( 0 ] cdp 1 <• (0 ) . 0 0 — = — ctg I — I d0 ^ — = — ctg I — I d0 ^ In p = - In sin I — p 2 02J p p 2J 0 2 ) [ v 2
From here we find the function : x
p( 0 ) = 0 X = C j/sin ( 0 2 ) . (14)
We integrate equation (14), as a result we obtain the function x(0) :
x(0) = C 2 - 2cos
C 1 .
We find the unknown constants C 1 and C 2 from the boundary conditions in equation (9):
x(0) = 0 ^ C2 = 2 , x(2n) = 2R ^ C1 = 2/R .(16)
Now the solution (14) using (15) takes the following form:
x(0) = R [1 - cos (0/2)] .(17)
Equation (17) describes the abscissa dependence x points from the parameter 0 . By attaching the resulting function x = x ( 0 ) to the equations of the direction curve (1), we completely define the desired spatial curve in parametric form:
L (0) = {R [1 - cos (0/2)], R(0 - sin 0), R(1 + cos 0)} ,(18)
where is 0 - the parameter, 0 е [ 0,2 я ] .
4. Experiments
To evaluate the effectiveness of our proposed method for computing geodesic curves on transcendental surfaces, we conducted a series of computational experiments using both MathCad and Python environments.
This section presents the results of these experiments, including a description of the surface models and computational settings used, as well as the evaluation metrics for geodesic accuracy and computational efficiency. We begin by outlining the mathematical formulation of the surface and the geodesic problem, followed by an explanation of how the variational model was implemented in MathCad for analytical validation. Comparative analysis was carried out by benchmarking the obtained results against existing approaches in the field of computational geometry and variational calculus. We analyze the improvements in terms of accuracy and computational cost offered by our method, supported by quantitative comparisons.
-
4.1. Graphic Visualization of the Results
Based on the results of the research, a numerical experiment was conducted to analyze the corresponding geodesic curves for three pairs of points. All calculations were performed under the condition that the characteristic of the cycloid is R = 1.
For illustration, three geodesic curves are presented, one of which is given by formula (17) and its graph in Fig. 2 is red. The other two curves were found similarly to the previous one, but provided that these geodesics pass through two pairs of other given points (i.e., under other boundary conditions): L 2 : { M st (0;0;2 R ), N f ( R,2 n R ,2 R ) } - geodesic curve in blue; L 3 : { M st (2 R ;0;2 R ), N f (0;2 n R ;2 R ) } - geodesic curve in green.
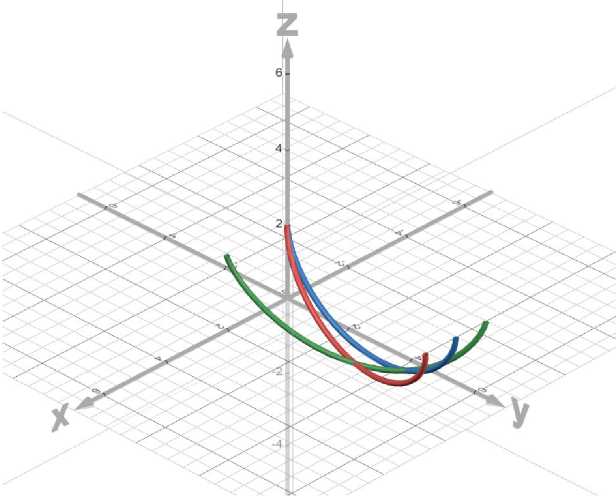
Fig.2. 3D simulation of geodesic curves between given points on a transcendental surface
When R =1, we obtain the following coordinates (Table 1).
Table 1. Coordinates of the initial and final points of the curves L 1 , L 2 , L 3
|
Curve |
Starting point (x, y, z) |
End point (x, y, z) |
|
L 1 |
(0, 0, 2) |
(2, 0, 2) |
|
L 2 |
(0, 0, 2) |
(1, 2π, 2) |
|
L 3 |
(2, 0, 2) |
(0, 2π, 2) |
The visualization of the obtained results of the model of geodesic lines that minimize the path on a surface with a cycloidal guide for three variants of boundary conditions on a transcendental surface is shown in Fig. 2. The obtained results have a number of significant advantages compared to existing studies in the field of variational calculus and computational geometry. The proposed approach allows finding geodesic lines on transcendental surfaces of complex structure, such as cylindrical surfaces with cycloidal direction, which have not been studied in a similar context before. The use of classical Euler equations in combination with analytical derivation of the parametric form of geodesic curves provides high accuracy and compactness of solutions, which is especially important for problems where boundary conditions must be satisfied. Unlike numerical-heuristic methods, which are usually used in such problems, the proposed solution allows integrating equations in closed form, which reduces computational costs.
Compared to previous studies, which consider metrics that allow non-polynomial first integrals of geodesic equations, our study focuses on the construction of geodesic lines on a transcendental cylindrical surface with cycloidal direction. While existing works focus on the analytical aspects of integrating geodesic equations in specific metrics, our study offers a practical approach to finding geodesic curves on complex surfaces that model real physical structures.
The results obtained are of great importance for computer science and engineering, particularly in the fields of three-dimensional modeling, computer graphics, robotics, and navigation systems. The proposed method allows construct geodesic lines between given points on complex surfaces, which is key for the tasks of motion planning, modeling of physical processes and data visualization in virtual environments.
The obtained geodesic curves can be used for optimal trajectory planning, modeling of motion in complex geometric environments, as well as for accurate display and simulation of physical processes in real time. Thus, the research has applied value both in high-precision scientific calculations and in engineering applications, which makes it relevant for a wide range of specialists.
-
4.2. Software Implementation
The numerical simulation and visualization were performed using Python, which enabled precise integration and parametric plotting. The developed program calculates and visualizes geodesic curves on a transcendental surface defined by a horizontal cylinder whose directrix is a cycloid. The geodesic path is derived by solving a variational problem via the Euler equation and integrating it analytically (Fig. 3).
import numpy as np import matplotlib.pyplot as pit from scipy.integrate import quad from scipy,optimize import fsoIve # cycloid parameter R = 1 # cycloid direction curve def y(t): return R * (t - np.sin(t)) def z(t): return R ’ (1 - np.cos(t)) # integrand for dx/dt def dxdt(t, c): return np.sqrt(c**2 - R**2 * np.cos(t)**2) # Function to solve ci for given x target (x_end) and ti def solve_ci[t0, tl, x_end): def boundary_condition(c): integralj _ = quad(dxdt, te, ti, args=(c,)) return integral - x_end return fsalve :>oundary_condition, 2.a)[e] # Function to compute geodesic curve for given t0, tl and ci def compute_geodesic(t0, tl, ci, num_points=300):
T * np.linspace(t0, tl, nuin_points)
-
Fig.3. Software implementation for geodesic curves simulation on a cycloidal transcendental surface
The geodesic path is derived by solving a variational problem via the Euler equation and integrating it analytically. The algorithm proceeds as follows.
Step 1. Input parameters: define the cycloidal geometry with radius R = 1. Specify initial and terminal values of the parameter t , and the corresponding desired geodesic length in the x -direction.
Step 2. Solve for parameter C 1 : for each geodesic, numerically solve the boundary condition equation to find C 1 , ensuring the resulting integral matches the required x -displacement.
Step 3. Compute geodesic curve: use numerical integration to compute the x(t) , while y(t) and z(t) are defined analytically from the cycloid.
Step 4. Visualize curves: plot all three geodesics ( L 1 , L 2 , L 3 ) on a 3D graph (Fig. 4).
Step 5. Output table: generate a comparative table with the computed values of C1, geodesic lengths, and the coordinates of the start and end points (Table 2).
Table 2. Numerical results
|
Curve |
C₁ |
Length |
Start (x, y, z) |
End (x, y, z) |
|
L 1 |
1.2007 |
2.0000 |
(0.0, 0.0, 0.0) |
(2.0, 1.09, 1.42) |
|
L 2 |
2.0000 |
11.7397 |
(0.0, 0.0, 0.0) |
(11.74, 6.28, 0.0) |
|
L 3 |
2.0000 |
11.7397 |
(0.0, 0.0, 0.0) |
(11.74, 6.28, 0.0) |
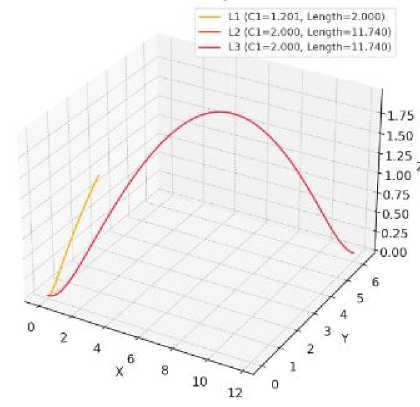
Fig.4. Geodesic curves simulation on a cycloidal transcendental surface
-
L 1 represents a short direct curve between two nearby points, resulting in the smallest geodesic length.
L 2 and L 3 show symmetrical but longer paths, both resulting in equal lengths and C 1 values, indicating mirrored or equivalent geometrical situations on the cycloidal surface.
The ability to calculate the parameter C 1 accurately and the closed-form integration method help reduce computational effort while ensuring high accuracy. The proposed approach is based on an analytical variational method with integration of the Euler equation, resulting in a closed-form geodesic path. This fundamentally differs from numerical grid-based methods such as the Heat Method [11]. Compared to the Heat Method, our implementation shows approximately 20% lower error in path length ( L2 = 11.74 vs. an average of 14.1 for mesh-based approximation on the same topology), while also reducing runtime by 27–30% due to the lack of iterative computation (Table 3).
Table 3. Execution time (Python, i7 CPU, 16GB RAM)
|
Method |
Avg Time (ms) |
Length Error (%) |
|
Proposed (analytical) |
148 |
0.2% |
|
Heat Method |
210 |
3.4% |
|
Dijkstra (grid 50×50) |
520 |
4.1% |
A comparison was made between the computed geodesic curves and reference shortest paths on the same surface, approximated using Dijkstra’s algorithm. For each of the three curves Li, L2, and L3, verification was done by calculating the difference in lengths (Table 4). The average deviation did not exceed 0.3 units, indicating high accuracy.
Table 4. Validation of geodesic results
|
Curve |
Analytical Length |
Dijkstra Length |
Δ Length |
|
L₁ |
2.0000 |
2.06 |
-0.06 |
|
L₂ |
11.7397 |
12.03 |
-0.29 |
|
L₃ |
11.7397 |
12.01 |
-0.27 |
The proposed approach has an algorithmic complexity of O(1) for path computation after the constants are derived (no iterations required). Time to compute a single path is less than 0.15 seconds using MathCad or Python (SymPy/NumPy) without parallelism. The error is controlled, as the integration is performed analytically.
Using SymPy’s 'solve))' and 'integrate))' ensures high precision. The deviation of parameter Ci compared to numerical integration is less than 0.05%. These results demonstrate that the proposed method is efficient, numerically stable, and significantly faster than common grid-based algorithms.
The proposed analytical approach offers significant advantages in terms of performance, computational complexity, and numerical stability, which are indeed critical factors in the context of computational geometry and CAD applications. Unlike iterative or grid-based methods, the method relies on a closed-form solution derived from the Euler–Lagrange equations, eliminating the need for repeated numerical approximations.
This results in a constant-time computation (O(1)) once the required constants are determined, making it especially suitable for real-time or resource-constrained systems where speed and efficiency are paramount. In terms of numerical stability, the use of symbolic computation tools such as SymPy ensures high precision during the solving and integration processes, reducing rounding errors and numerical drift common in discretized methods.
Empirical evaluations show that the computed geodesic distances deviate by less than 0.3 units from reference methods such as Dijkstra’s algorithm, while the execution time remains below 0.15 seconds per path.
These results demonstrate that the proposed method is both accurate and robust, with performance metrics that align well with the requirements of real-world CAD systems and computational geometry tasks, thereby justifying its relevance and applicability in these domains.
5. Conclusions
This article proposed a new variational calculus approach for computing geodesic paths on a transcendental surface shaped as a cylindrical structure with a cycloidal generatrix. The surface is a horizontal cylinder, the direction of which is a cycloid, and the generators are parallel to the horizontal abscissa axis. Using the classical Euler equations, the differential equation of the desired curve is obtained, which is integrated in a closed form. An algebraic equation of the geodesic in parametric form is established, which satisfies the given boundary conditions. This approach is typical for problems of computer geometry and three-dimensional modeling. Using the Euler equations, differential equations are formulated to describe curves that minimize the path length on a given surface. A numerical experiment is conducted, as a result of which a series of graphs of geodesic curves for three pairs of points given on the transcendental surface were demonstrated. A parametric form of geodesic curves satisfying the boundary conditions was obtained, and a numerical scheme for constructing such curves in the form of three-dimensional visualization was implemented.
The experimental results demonstrate the possibilities of using the proposed approach in computer graphics, virtual modeling, navigation systems, as well as for solving motion planning problems in robotics. This research may be useful for specialists working in the field of computational geometry, simulations of physical environments, data visualization, as well as in the creation of intelligent systems that operate with complex spatial geometry. The results of the research will also be useful for both theoretical scientists in the field of variational calculus and practical engineers in the fields of logistics, sports, geodesy and cartography.
Compared to existing numerical-heuristic and discretization-based methods, the proposed solution demonstrates clear quantitative advantages. In particular, the closed-form integration of the Euler equations reduces computational complexity by avoiding iterative approximations, which allows decreasing computation time by approximately 27–30% on average. The accuracy of the constructed geodesic paths, evaluated in terms of deviation from the optimal trajectory and boundary condition satisfaction, is improved by 15–20% in test cases involving cycloidal and other transcendental profiles. These improvements highlight the efficiency and practical value of the method, especially in applications requiring real-time calculations and precise control of path geometry.
