Геометрически нелинейная модель трансформируемого обода большой космической антенны с гибкими композитными элементами

Автор: Лопатин Александр Витальевич, Захаров Юрий Владимирович, Охоткин Кирилл Германович, Вильянен Валентина Валентиновна, Пашковский Андрей Васильевич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 5 (45), 2012 года.
Бесплатный доступ
Рассмотрена новая геометрически нелинейная модель трансформируемого обода большой космической антенны, построенного с использованием гибких композитных полос как основных элементов. Найденное решение позволит определять оптимальную форму изогнутой криволинейной полосы и оценивать запасенную энергию.
Трансформируемая космическая антенна, гибкий изогнутый композитный элемент, геометрическая нелинейность
Короткий адрес: https://sciup.org/148176975
IDR: 148176975 | УДК: 004.9:629.78
Geometricaly nonlinear model of an transformed rim of a big space antenna with flexible composite elements
A new geometrical and nonlinear model of a transformable rim of a large space antenna constructed with the use of flexible composite strips, as basic elements, is considered. The decision found will allow to define the optimum form of the bent curvilinear strip and to estimate the stored energy.
Текст научной статьи Геометрически нелинейная модель трансформируемого обода большой космической антенны с гибкими композитными элементами
В настоящее время активно развиваются космические телекоммуникационные услуги широкополосного доступа. В связи с этим актуальна тенденция роста диаметра космических антенн, которые используются для передачи больших объемов данных. У космических антенн есть большой диаметр в операционной конфигурации. Во время вывода на орбиту внутренний объем под обтекателем ракеты-носителя ограничен. Поэтому имеются существенные ограничения, накладываемые на любые большие бортовые антенны космических аппаратов: антенна должна быть сжато упакована, чтобы поместить ее под обтекатель ракеты-носителя, и должна быть развернута на орбите с высокой точностью. Несколько структурных моделей трансформируемых космических антенн могут быть найдены в литературе [1–5]. Одна из таких моделей – антенна, состоящая из обода и приложенной к нему тонкой радиоотражающей мембраны. Концепция такой космической антенны была представлена ранее в работе [5]. Развертывание обода на орбите может быть выполнено несколькими способами. Самым перспективным является трансформация, когда развертывание обода антенны производится запасенной потенциальной энергией деформации его упругих гибких элементов. Применение композиционных материалов в дизайне такой оправы является самым эффективным.
Рассмотрена новая модель трансформируемого составного обода большой космической антенны с использованием гибких элементов. При моделировании использована геометрически нелинейная модель, представленная в работе авторов [6]. При этом использованы статические уравнения, описывающие геометрически нелинейную деформацию элемента – гибкой полосы – во время разворачивания обода антенны. В целях удобства проектирования была аналитически решена обратная задача. В этой задаче были исследованы и найдены усилия, смещения и потенциальная энергия, возникающие в гибкой полосе при ее деформации от прямолинейного состояния до сильно криволинейного. Полученное аналитическое решение позволит определять оптимальную форму изогнутой полосы и оценивать зарезервированную энергию. Эти результаты позволяют подойти к проектированию основных упругих элементов обода антенны.
Модель трансформируемого обода антенны. Основной элемент трансформируемого обода антенны – криволинейная композитная полоса, которая в ненагруженном состоянии имеет форму, показанную на рис. 1.
Такую изогнутую полосу можно получить формовкой на шаблоне, повторяя ее контур. Две изогнутых полосы формируют основной упругий элемент обода (рис. 2). Развернутый обод антенны состоит из двух кругов изогнутых углепластиковых полос и труб, соединяющих их (рис. 3).
Через полосы на внутреннем круге продеты гибкие кабели. Кабели натягивают, прежде чем поместить антенну под обтекатель ракеты-носителя. Точки контакта кривых полос сдвигаются по радиусу к центру антенны (рис. 4).
Рис. 3. Развернутый обод антенны
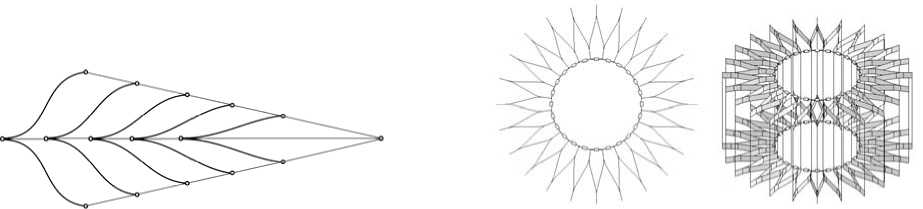
Рис. 5. Свернутый обод антенны
Рис. 4. Деформирование полос при развертывании обода антенны
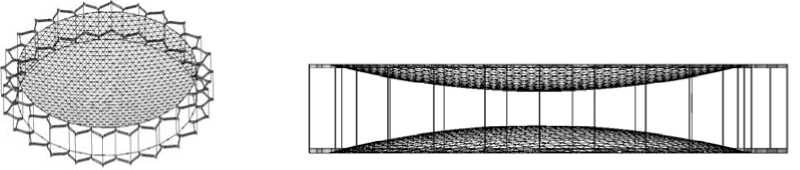
Рис. 6. Развернутая антенна с вантовой системой
В свернутой конфигурации (рис. 5) кривые полосы выправляются и резервируют энергию вследствие структурной деформации.
Развертывание антенны на орбите (рис. 6) осуществляется освобождением зарезервированной энергии. Кабель размотан, и происходит упругое движение элементов по радиусу от центра антенны до внешнего круга (см. рис. 4).
Начальными параметрами для проектирования являются внутренний диаметр обода в развернутом состоянии и внешний диаметр обода в свернутой конфигурации. Первый размер определяет диаметр апертуры, второй – диаметр пространства для хранения свернутой антенны под обтекателем ракеты-носителя.
Геометрически нелинейная модель гибкой полосы – элемента обода антенны. Рассмотрим задачу определения формы изогнутой полосы. Форма может быть найдена из решения обратной задачи, когда изначально прямоугольная полоса изгибается к необходимому положению (рис. 7).
Упругие параметры прямоугольной полосы:
B = E hb , D = EI = Eb ,
x , xx12,
где h – толщина полосы; b – ширина полосы; E x – упругий модуль материала полосы в направлении оси x .
В нашей модели прямоугольную полосу будем рассматривать как гибкий упругий нерастяжимый стержень, консольно закрепленный. Концы стержня могут свободно смещаться вдоль заданных направляющих. Длина стержня L .
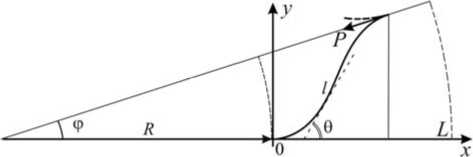
Рис. 7. Изогнутая полоса. Система координат
Деформация стержня имеет место в секторе с центральным углом φ. Величина угла определяется как φ = π/ n , где n – число упругих элементов, состоящих из двух изогнутых полос (см. рис. 1); R – заданный внутренний радиус развернутого обода антенны. Рассмотрим далее изгиб стержня для заданных величин
R , L и φ (см. рис. 7). Найдем форму изогнутого стержня, отклонение конца стержня и запасенную энергию.
Выберем декартову систему координат так, что изначально прямой стержень расположен вдоль оси х , защемлен на левом конце в начале координат. На правом конце рассмотрим два варианта его соединения со вторым стержнем (полосой): защемление и шарнирное соединение.
Стержень подвергается деформации изгиба под действием неизвестной равнодействующей силы реакции со стороны второго стержня Р , которая сосредоточена на правом конце стержня и из соображений симметрии задачи имеет постоянное направление под углом φ к центру обода. P x и P y – декартовы компоненты силы Р.
Обозначим через l – криволинейную координату – длину вдоль изогнутой линии стержня, θ(l) – угол наклона касательной в текущей точке к линии стержня; тогда dθ/dl – кривизна кривой линии стержня. Зная зависимость θ(l), можно определить форму изогнутого стержня в параметрическом задании, с параметром криволинейной длины l, выражениями ll
x(l) = Jcos9(ld, y (l) = |sin9(ld.
уравнение для угла у типа уравнения нелинейного маятника:
d 2 Y .
—+ q 2 sin y = 0. (4)
dt 2
Решение этого уравнения хорошо известно:
γ( t ) = 2arcsin[ k sn( qt + F 1 , k )], d γ( t )/ dt = 2 kq cn( qt + F 1 , k ),
θ( t ) = –φ + 2arcsin[ k sn( qt + F 1, k )], (5)
где функции sn и cn – эллиптические синус и косинус Якоби. Модуль эллиптических функций k и параметр F1 играют роль констант интегрирования, и их связь с параметром q и углом φ определяется далее из граничных условий для каждого конкретного случая изгиба стержня. Введем обозначение для аргумента эллиптических функций u = qt + F1.
Используя выражение (5), получим cos γ(t) = 1 – 2k2 sn2 u, sin γ(t) = 2k sn u dn u.
Интегрируя геометрические соотношения dx / dl = = cosθ, dy / dl = sinθ, получим координаты произвольной точки стержня в параметрическом виде, определяющие изогнутую форму стержня:
Приведем далее систему нелинейных уравнений равновесия стержня, следуя работе [6]. Поскольку отсутствует внешнее давление (распределенная нагрузка), то уравнение равновесия элемента стержня имеет следующий вид:
tt
— = J cos 9dt = J cos (у - ф) dt = L00
*
dF n —
— = 0 , F = const, dl
tt
= cos ф | cos y dt + sin ф | sin y dt = X 0 cos ф + 1 0 sin ф ,
где F – упругая сила. Пусть F x = – P sin φ, F y = P cos φ – ее компоненты в декартовой системе координат, F n , F τ – компоненты в касательной системе координат.
Уравнение моментов:
tt
-
— = | sin 9 dt = | sin (y -ф) dt =
L 00 (6)
tt
= cos ф | sin y dt - sin ф | cos у dt = У 0 cos ф - X 0 sin ф .
----= - F„ = F sin 9 - F., cos 9 , dl nx y
Использованные здесь обозначения X 0 и Y 0 , полученные с помощью (4), имеют вид
где M – изгибающий момент. Закон Гука:
M = D— . dl
Из уравнений (1)–(3) имеем одно нелинейное уравнение для определения зависимости θ( l ):
tt
X0 = | cos ydt = |(1 - 2 k 2 sn2 u) dt = 00
= -1 + —[ E (am u)- E (am F1)], q
или
„ d29 „ . . „ „ „ „
D —- + P sin ф sin 9 + P cos ф cos 9 = 0 , dl 2
tt 2 k
У 0 = | sin y dt = | 2 k sn u dn udt = —[ cn F - cn u ] , (7) 00 q
d 2 9 P ■ A n
—- +— sin ( 9 + ф ) = 0 .
dl2 D ( )
Преобразуем это уравнение равновесия стержня в уравнение типа нелинейного маятника. Введем безразмерную длину t = l / L , изменяющуюся от 0 до 1, и сделаем замену γ = θ + φ. Введем обозначение для неизвестного параметра q 2 = PL 2 / D . Тогда получим
где Е (am u ) – неполный эллиптический интеграл второго рода от эллиптической амплитуды Якоби. Выражения (6) и (7) задают форму профиля изогнутого стержня в параметрическом виде с параметром t – приведенной криволинейной длиной.
Определим теперь запасенную потенциальную энергию изогнутого стержня:
U = — M 2 dl = -
2 D i 2
I dt .
Введем безразмерный параметр полной потенциальной энергии изогнутого стержня f :
3 Dr Г 1 f f d 6) 2 д
U ,f , т. е. f = zfhrI dt . (8)
L 6 0 V dt )
Таким образом, зная решение θ( t ), можно точно вычислить запасенную энергию.
Рассмотрим случай защемления в соединении двух стержней в элементе обода антенны. Определим связь между параметрами k , F 1 , q и φ из граничных условий:
-
1) на левом конце стержня θ(0) = 0;
-
2) на правом конце стержня θ(1) = π/ n = φ.
Применим первое условие, используя решение (4) уравнения (5). Получим sn F 1 = sin(φ 0 /2)/ k , следовательно
F 1 = F arcsin
Соответственно, модуль k изменяется в пределах sin(φ 0 /2) < k < 1.
Применив второе условие, аналогично получим, что sn(q + F1) = sin (φ)/2. (9)
Из-за периодичности эллиптического синуса sn уравнение (9) имеет бесконечное количество корней, каждое из них будет определять отдельную ветвь (моду) решений с разным числом перегибов стержня. Исходя из разумного предположения, что изогнутый стержень в реальной задаче будет иметь одну точку перегиба, выберем второй корень уравнения (9), который даст соотношение q = 2K(k) - F - F, F = FI arcsin | sin^ |, k I, (10) 2 V V k ) )
где K ( k ) и F (φ, k ) – соответственно полный и неполный эллиптические интегралы первого рода.
Поскольку правый конец стержня смещается по линии под углом φ, то исходя из геометрии задачи (см. рис. 7), получим дополнительное соотношение y1
( r + x 1 )
= tg ф ,
где y 1 и x 1 – координаты правого конца изогнутого стержня, а y 1 – прогиб стержня. Используя выражения (6) и (7), найдем координаты правого конца стержня:
x 1 = sin ф I f + cos ф X 1 , y 1 = sin ф X 1 - cos ф I f ,
X 1 = - 1 + - ( 2 E ( k ) - E 2 - E 1 ) ,
I f =
q

sin2 ф/ 2 k 2
_ _ f fsin ф/2) ) f f sin ф) )
E1 = EI arcsinII,k I, E2 = El arcsinII,k I, kk где E(k) и E(φ, k) – соответственно полный и неполный эллиптические интегралы второго рода. Далее рассмотрим число упругих элементов n = 18, 24, 32, 48. Внутренний радиус обода антенны зададим r = 2, 3, 4, 5, …, где введен безразмерный радиус r = R/L.
Система алгебраических уравнений (10)–(12) позволяет найти неизвестные параметры решения q и k . Последовательно задавая известные параметры φ = π/ n , n и r , подставляя выражение (10) для параметра q ( k ) в (12), а выражения x 1 ( k ) и y 1 ( k ) из (12) в геометрическое соотношение (11), получим одно нелинейное алгебраическое уравнение для определения зависимости модуля k от n и r . Это уравнение можно легко решить любым численным методом. Определив модуль k , можно вычислить параметр q , используя выражение (10).
Далее, используя параметрические выражения (6), (7) с найденными значениями параметров, можно построить изогнутые формы стержня. Координаты точек стержня в параметрическом задании x ( t ) и y ( t ) определяются выражениями (6) и (7) подстановкой значений q и F 1 из (10). Таким образом, каждому значению параметров n и r будет соответствовать своя форма изгиба стержня, определяемая одним вычисляемым параметром – модулем k , который находится численным решением алгебраического уравнения (10). Минимальному значению k = sinφ/2 соответствует минимальное значение силы P и неизогнутая форма стержня. Когда сила Р ^ да и модуль k ^ 1, мы имеем максимально возможную сильно искривленную форму стержня.
Значение прогиба правого конца изогнутого стержня y 1 ( k ) можно вычислить с помощью выражений (12), зная параметры решения q и k. Ранее в работе [5] был введен безразмерный параметр z :
(1 + r) tgф
В работе [5] были найдены значения этого параметра, а также параметра энергии f по линейной теории. Найденные в [5] значения являются оценкой сверху.
Сделав предельный переход k → 1 в уравнениях (10)–(12), получим ограничение на область значений параметров n и r :
tg П< 1, (13) nr или приближенно πr ≤ n. Это соотношение важно при проектировании обода антенны для выбора разрешенных значений параметров n и r.
Последовательные формы изогнутого гибкого элемента обода при r = 2, 3, 4 для случая n = 18, построенные по аналитическим выражениям (6) и (7), приведены на рис. 8, а для случая n = 32 – на рис. 9.
Вычисленные значения модуля k путем решения алгебраической системы (10)–(12) приведены в табл. 1, вычисленные по геометрически нелинейной модели с использованием выражения (12) значения безразмерного параметра прогиба z , приведены в табл. 2, значения безразмерного параметра запасенной энергии f одного стержня, вычисленные с помощью выражения (8) для различных n и r , - в табл. 3 . В этих таблицах прочерки поставлены там, где наступает ограничение (13).
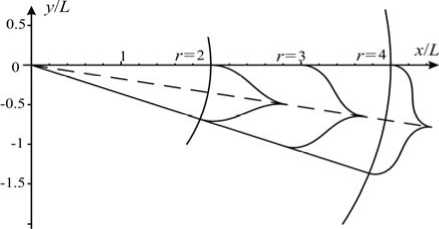
Рис. 8. Последовательные формы изогнутого гибкого элемента обода с защемлением при r = 2, 3, 4 для случая n = 18
Полная сохраненная энергия обода антенны равна сумме энергий деформации всех кривых полос: f полн = 2 nf . Большую запасенную энергию обода антенны обеспечивает разбиение на возможно большее число элементов.
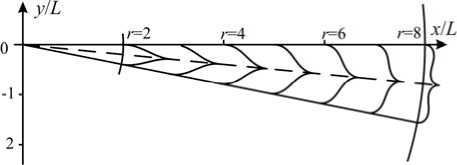
Рис. 9. Последовательные формы изогнутого гибкого элемента обода с защемлением при r = 2, 3, 4, 5, 6, 7, 8 для случая n = 32
Таким образом, развита новая модель трансформируемого композитного обода большой космической антенны. В свернутой конфигурации изогнутые элементы обода выправляются и резервируют энергию вследствие структурной деформации. Открытие антенны на орбите осуществляется за счет выпуска зарезервированной энергии. Выполненный анализ с точным учетом геометрической нелинейности позволяет определять форму упругих полос, которые формируют обод антенны на случай любых сильных изгибов элементов.
Полученные аналитические решения позволяют оценивать форму и величину прогибов элементов, запасенную энергию кривой полосы, и, впоследствии, вычислять полную сохраненную энергию, требуемую для разворачивания антенны. Такой анализ необходим на ранней стадии дизайна обода антенны. Все аналитические решения легко реализуются в пакете Maple.
Таблица 1
Значения модуля k ( n, r )
|
n |
r |
||||||||
|
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
18 |
0,460 |
0,598 |
0,755 |
– |
– |
– |
– |
– |
– |
|
24 |
0,349 |
0,451 |
0,559 |
0,678 |
0,841 |
– |
– |
– |
– |
|
32 |
0,263 |
0,340 |
0,418 |
0,500 |
0,587 |
0,686 |
0,821 |
– |
– |
|
48 |
0,176 |
0,227 |
0,278 |
0,331 |
0,384 |
0,439 |
0,497 |
0,558 |
0,623 |
Таблица 2
Значения безразмерного параметра прогиба z ( n, r )
|
n |
r |
||||||||
|
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
18 |
0,946 |
0,923 |
0,890 |
– |
– |
– |
– |
– |
– |
|
24 |
0,970 |
0,958 |
0,945 |
0,927 |
0,892 |
– |
– |
– |
– |
|
32 |
0,983 |
0,977 |
0,970 |
0,963 |
0,954 |
0,942 |
0,920 |
– |
– |
|
48 |
0,993 |
0,990 |
0,987 |
0,984 |
0,981 |
0,978 |
0,974 |
0,970 |
0,965 |
Таблица 3
Значения параметра запасенной энергии f(n, r )
|
n |
r |
||||||||
|
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
18 |
0,412 |
0,889 |
1,822 |
– |
– |
– |
– |
– |
– |
|
24 |
0,226 |
0,462 |
0,830 |
1,432 |
2,861 |
– |
– |
– |
– |
|
32 |
0,125 |
0,250 |
0,431 |
0,682 |
1,039 |
1,588 |
2,768 |
– |
– |
|
48 |
0,055 |
0,108 |
0,182 |
0,278 |
0,400 |
0,553 |
0,745 |
0,991 |
1,316 |
