Гибридная система дифференциальных уравнений, описывающая твердое тело, прикрепленное к двум упругим стержням

Автор: Мижидон Арсалан Дугарович, Хамханов Алдар Кимович
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Математическое моделирование и обработка данных
Статья в выпуске: 4, 2022 года.
Бесплатный доступ
В данной работе рассматривается построение математической модели для механической системы, представляющее собой твердое тело, прикрепленное к двум балкам Эйлера - Бернулли. Уравнений динамики были получены с использованием вариационного принципа Гамильтона - Остроградского. Математическая модель, представлена в виде гибридной системы дифференциальных уравнений, для которой обсуждается возможность использования единого подхода исследования свободных колебаний, предложенного при исследовании систем твердых тел, прикрепленных к одному стержню.
Твердое тело, гибридная система дифференциальных уравнений, балка эйлера, бернулли
Короткий адрес: https://sciup.org/148325424
IDR: 148325424 | УДК: 519.62, | DOI: 10.18101/2304-5728-2022-4-38-47
A hybrid system of differential equations describing a rigid body attached to two elastic rods
In this paper, we consider the construction of a mathematical model for a mechanical system, which is a rigid body attached to two Euler-Bernoulli beams. Dynamic equations were obtained using the variational principle of Hamilton-Ostrogradsky. The mathematical model is presented in the form of a hybrid system of differential equations, for which the possibility of using a unified approach to the study of free vibrations, proposed in the study of systems of solids attached to one rod, is discussed.
Текст научной статьи Гибридная система дифференциальных уравнений, описывающая твердое тело, прикрепленное к двум упругим стержням
Механические системы, состоящие из твердого тела или же системы твердых тел, связанные между собой одним стержнем достаточно подробно исследованы в работе [1]. Уравнения динамики для рассматриваемых систем были получены с применением вариационного принципа Гамильтона — Остроградского, что в свою очередь приводит к возникновению системы дифференциальных уравнений, названных гибридными (ГСДУ). Особенность ГСДУ состоит в том, что она представляет собой систему дифференциальных уравнений, включающая в себя как обыкновенные дифференциальные уравнения, так и уравнения в частных произ- водных. Позже в работе [2] были получены теоретические основы исследования для данного класса гибридных систем, что в свою очередь привело к разработке единого подхода к исследованию собственных колебаний путем построения обобщенных математических моделей применительно к широкому классу механических систем, состоящего из систем твердых тел, закрепленных на балке Эйлера — Бернулли [3].
-
1 Постановка задачи
Механическая система состоит из двух упругих стержней, к которым крепится посредством пружин жесткостью с 1 , с 2, с 3, с 4 твердое тело массой m в точках a 1 , a 2, a 3, a 4 (рис. 1). Зададим 0 xz неподвижную систему координат. Пусть 0 xz имеет начало координат в точке крепления нижнего стержня, а ось 0 x будет направлена вдоль оси этого стержня. Так же нам потребуется подвижная система координат 0 ‘ x'z' , связанная с твердым телом. Будем считать, что в состоянии равновесия оси координат описанных систем параллельны. В рамках заданной механической системы тело с массой m может двигаться поступательно вдоль оси 0 x и одновременно поворачиваться вокруг собственной оси на некоторый угол ф . Функции, выражающие перемещение точек стержней вдоль оси Oz обозначены как u 1 ( x , t ), u 2 ( x , t ) .
Запишем уравнение перемещения вдоль оси Oz для произвольной точки тела ( x ', z ')
z = z 0 + z ‘ + x 'ф . (1)
Данное равенство будет справедливо в силу того, что перемещение вдоль оси 0 x отсутствует, а угол ф является достаточно малым.
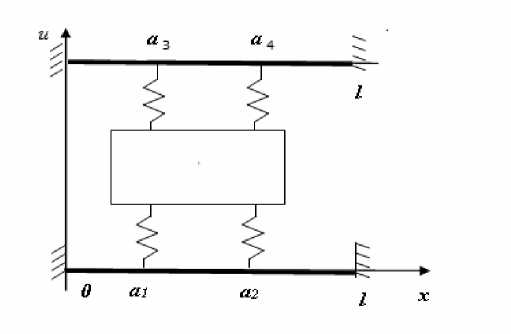
Рис. 1. Механическая система с двумя упругими стержнями
На основании полученного равенства (1), перемещения точек соединения упругих элементов и твердого тела массой m вдоль оси Oz можно описать следующими равенствами zx = z0 + zi'+ d 1Ф, z2 = z0 + z2'+ dФ, z3 = z0 + z3'+ d3Ф, z4 = z0 + z4'+ d4Ф, где z1', z2', z3', z4' — координаты точек соединения тела массы m и упругих элементов вдоль оси Oz, d 1, d2, d3, d4 — расстояния от подвижной оси 0'z' до осей пружин, прикрепленных к стержням в точках
a l , a 2 , a 3 , a 4 .
С учетом полученных выражений (2) запишем потенциальную энергию пружин как квадрат ее линейной деформации.
U = c i ( z 0 + z 1 -
7 / 2 . / ' . 7 / ,\\ 2
d 1 ф - u 1 ( a 1 , t )) + c 2 ( z 0 + z 2 + d2 ф - u 1 ( a 2 , t )) +
/ . ' 7 / ,\\2 / . ' . 7 / ,\\2
+ c 3 ( z 0 + z 1 - d3 Ф - u 2 ( a 3 , t )) + c 4 ( z 0 + z 1 + d4 ф - u 2 ( a 4 , t ))
.
Уравнение для кинетической энергии твердого тела массой m будет иметь вид
.2 г • 2
mz_ 1_ф_
T\ + ,
1 2 2
.
где 1 ф — момент инерции данного тела относительно центра масс при
повороте на угол ф .
Исходя из технической теории стержней, запишем потенциальную и кинетическую энергии рассматриваемых стержней.
T = 1 W ( dU ) dx +
2 2 J dt
\pF ( dU 2 ) 2 dx , dt
U2 =1 fEZ (du )2 dx +
1 z/2
J El ( d 42 ) 2 dx ,
0 dx-
-
2 2 J dx 2
где I — момент инерции поперечного сечения стержня относительно нейтральной оси сечения, перпендикулярной к плоскости колебаний, E — модуль упругости, F — площадь поперечного сечения и р — плотность материала стержня.
Далее следуя единому подходу исследования свободных колебаний, предложенному для систем, прикрепленных к одному стержню, также воспользуемся вариационным принципом Гамильтона — Остроградского и получим следующий интеграл.
J ( z , p , u1, u 2) = J 5 ( T - U ) d1 = 0, (6)
где U — кинетическая энергия системы, а T — потенциальная энергия системы.
2 Гибридная система дифференциальных уравнений
Составим вспомогательную функцию с учетом полученных соотношений для кинетической и потенциальной энергии (3)-(5).
р(а) = J(z + aAz,ф + aAp,u + aAu1,u2 + aAи2).
Затем вычислим производную от функции р ( а ) по параметру а и тогда мы сможем определить вариацию функционала действия 5 J при а = 0
5J = 5ф(0) = j^ mz05z0 + 1рф5ф "'dtt - ti
-J[c1( z 0 + z‘ - dp - u1(a1, 1 ))(5z0 - d15p - 5u1(ap1 ))]d1
t i
-J[ c 2( z0 + z 2 + d 2p - u1( a 2,1 ))(5z0 + d 25p - 5u1( a 2,1 ))]d1 - ti
-J[ c3( z0 + z3 - d3p - и 2(a3,1 ))(5z 0 - d35p - 5u 2( a 3,1))]d1 -
-
1 i
-
1 2
-
- J [c4 (z0 + z4 + d4ф - и2 (a4,1 ))(5z0 + d45p - 5u2 (a4,1 ))]d1 +
1 i
l
+J J PF
1 i _
auiCx,!) d5ui(x,1) _ l
a 1 a 1 J
du1(x, 1) d25u1(x, 1)
^X dx2 dx
d1 +
J J PF
1 i .
du2(x, 1) d5u2(x, 1)
d 1 d 1
, l du^ (x, 1) d25u9 (x, 1) , dx - El —2 \ ---—- dx
0 ax2 ax1
d1.
Далее при помощи вариационного принципа Гамильтона — Остроградского получим t1
8 J = J ( - mz0 - c1 [ z 0 + z ’- d 1 ф - u1 ( a 1 ,t ) ]- c 2 [ z 0 + z 2 + d 2 ф - u1 ( a 2 , t ) ] + t 0
+c3 [z0 + z3 - d3ф-u2 (a3,t)]-c4 [z0 + z4 - d4ф -u2 (a4,t)])8z0dt + t1
+J(- 1фФ + c1 d 1 [ z0 + z1 - d 1ф - u1 (a1, t)] + c 2 d 2 [ z 0 + z 2 + d 2ф - u1 (a 2, t)] + t0
t 1
+ J ( - 1 ф Ф + c 1 d 1 [ z о + z 2 - d 1 Ф - u 1 ( a 1 , t ) ] + c 2 d 2 [ z о + z 2 + d 2 Ф - u 1 ( a 2 , t ) ] + t 0
+c3d3 [z0 + z3 -d3ф-u2 (a3,t)] + c4d4 [z0 + z4 + d4ф -u2 (a4,t)])8фdt + t1l
+JJ(c [z0 + z‘ - d 1ф - uj (x,t)] + c2 [z0 + z2 + d2ф - ut (x,t)]- t00
d u 'u u i |e
-
- pF —-— EI —— 8 u dxdt +
d t 2 d x 4 J 1
t 1 l
+ JJ ( c 3 [ z 0 + z 3 - d3 ф - u 2 ( x , t ) ] + c 4 [ z 0 + z 4 + d4 ф - u 2 ( x , t ) ] t 0 0
—
-
p F( u2 - ei d u2 1 8 u,dxdt = 0.
dt 2 ax4 J 2
Далее согласно основной лемме вариационного исчисления мы получим ГСДУ для динамики системы. Так как допустимые вариации 8 z 0( t ), 8ф и 8 u1(x , t ), 8 u 2( x , t ) независимы и произвольны.
mz 0 + c 1 [ z 0 + z ‘ - dx ф - u 1 ( a 1, t ) ] + c 2 [ z 0 + z '2 + d 2 ф - u 1 ( a 2, t ) ] +
+ c 3 [ z 0 + z 3 - d 3 Ф - u 2 ( a 3, t ) ] + c 4 [ z 0 + z 4 + d 4 ф - u 2 ( a 4, t ) ] = 0;
-
1 ф ф - c 1 d 1 [ z 0 + z 2 - d 1 Ф - u 1 ( a 1 , t ) ] + c 2 d 2 [ z 0 + z 2 + d2 Ф - u 1 ( a 2 , t ) ] +
-
- c 3 d 3[ z 0 + z 3 - d 3 Ф - u 2 ( a 3, t ) ] + c 4 d 4 [ z 0 + z 4 + d4 ф - u 2 ( a 4, t ) ] = 0;
p F ^ u 1 + EI дГ 4Г = c 1 [ z 0 + z 2 - d 1 Ф - u 1 ( x , t ) ] 8 ( x - a 1 ) + (7)
d t dx
+ c 2 [ z 0 + z 2 + d2 ф - u 1 ( x , t ) ] 8 ( x - a 2 )
p F ^d ur + EI ^I x r = c 3 [ z 0 + z 3 - d 3 Ф - u 2 ( x , t ) ] 8 ( x - a 3 ) +
+ c 4 [ z 0 + z 4 + d4 ф - u 2 ( x , t ) ] 8 ( x - a 4 ) .
Систему (7) приведем к следующему виду
Zo + Pi2 (zо + z‘-d1Ф -U\ (a\,t)) + P22 (zо + z2 + d2Ф - u (a2,t)) + +p32 (z0 + z3- d3p-u2(a3,t)) + p42(z0 + z4 + d4p-u2(a4,t)) = 0, ф - q12 (z0 + z‘ - d 1p - u 1 (a1, t)) + q22 (z0 + z2 + d2p - u1 (a2, t ))--q32 (z0 + z3 - d3p - u2 (a3,t)) + q42 (z0 + z4 + d4p - u2 (a4,t)) = 0, d2 ui dt2
, d4u, +b dt4
= e1 (z0 + z‘ - d 1p - u 1 (a1, t)) 5 (x - a1) +
+e2 (z0 + z‘ + d2p - u 1 (a2, t)) 5 (x - a2)
d 2 и 2 dt t
, d4u2 + b —t dt4
= e3 (z0 + z‘ - d3p - u2 (a3,t))5(x - a3) +
+e4 (z0 + z4 + d4p - u2 (a4,t))5(x - a4), c cd EJ c где p, = J -, q, =. , b = ™77, e = , 1=1,..4.
V m у I p p F p F
На u 1 ( x , t ) , u 2 ( x , t ) , наложены граничные условия:
u 1 ( 0, t ) = u 1 ( l , t ) = 0, u 2 ( 0, t ) = u 2 ( l , t ) = 0,
^Ц 1 ( 0, t ) =d u > ( 1 , t ) = 0, d u 2 ( 0, t ^d u 2 ( 1 , t ) = 0
dx dx dx dx
3 Дифференциально-алгебраическая система дифференциальных уравнений
Подставим в (8) z 0, p , u 1 ( x , t ), u 2( x , t ) в следующем виде:
z 0 = A s1n(®t), p = Аф s1n(®t), u1 (x, t) = V1 (x) sin (rot), u2 (x, t) = V, (x) sin (rot), и из системы (8) получим дифференциально-алгебраическую систему уравнений.
-to 2 A + p 2 ( A + z ’ - d ] A , - V 1( a )) + p 2 ( A + z\ + d 2 A , - V ( a 2 )) + + p 2 ( A + z 3 - d 3 A , - V 2 ( a 3 )) + p 4 ( A + z ‘ + d 4 A , - V 2 ( a 4 )) = 0,
-
- to 2 A , - q 1 ( A + z ‘ - d 1 A , - V ( a i )) + q 2 ( A + z 2 + d 2 A , - V ( a 2 ))
-
-
- q 3 2 ( A + z 3 - d 3 A , - V z ( a 3 )) + q 4 ( A + z 4 + d 4 A , - V 2 ( a 4 )) = 0,
d V M
-
- to 2 V ( x ) + b ---= e, ( A + z ‘ - dA - V ( x )) 5 ( x - ax ) +
-
1 dx 4 1 1 1 1 1
+ e 2 ( A + z ‘ + d 2 A , - V1 ( x )) 5 ( x - a 2)
7 d 4 V7(x)
-to 2 V ( x ) + b ---. = e ( A + z ‘ - dA - V ( x )) 5 ( x - a 3) +
-
2 dx 4 3 3 3 2 3
+ e 4 ( A + z 4 + d 4 A , - V 2 ( x )) 5 ( x - a 4).
В силу того, что соотношения три и четыре из (10) понимаются в обобщенном смысле, то для произвольной основной функции ,(x, t) бу дут справедливы следующие равенства:
г 7 d 4 V ( x ) , х
J ( - to 2 V ( x ) + b -----4 ) , ( x , t ) dx =
J0 1 dx 4 3 '
= C1(A + z’ - d 1 A, -V1(aj),(a1,t) + e2(A + z2 + d2A, - V^(a2)),(a2,t), г 7 d4 V, (x) z x
J ( - to 2 V ( x ) + b ----5^) , ( x , t ) dx =
J0 2 dx 4 3 '
= e 3( A + z 3 - d 3 A , - V 2( a 3)) , ( a 3, t ) + e 4( A + z 4 + d 4 A , - V 2( a 4)) , ( a 4, t ) .
А полученные условия для функций V ( x ) , V 2 ( x ) из граничных условий (10) будут иметь следующий вид:
V (0) = V (1 ) = 0, v2 (0 ) = V2 (1 ) = 0,
dV- (0) = dV- (I ) = 0, dV^ (0 ) = dV^ (l ) = 0.
dx dx dx dx
Теорема 1 . Пусть G1 ( x ) , G 2 ( x ) , G 3 ( x ) , G 4 ( x ) — обобщенные решения уравнений
-to2Gi(x) + b^ ^4(x) = 5(x), i = 1,..4.
Тогда для любых to , A , A , решения системы
-to V (x) + b —-^-4—- = e1 (A + z1 - d 1 A, - V (x)) • 5 (x - a1) +
+e 2 (A + z ‘ + d 2 A, - V (x)) • 5 (x - a 2)
2 , х d4V (x)
—to2 V (x) + b---= e
2V dx4 3
—
d 3 A v
—
x — a з) +
+e4 (A + z 4+ d4 Av — V2 (x)) • 5(x — a 4)
будут иметь вид
V1 (x ) = G1 (x — a1 )• e1( A + z; — d 1 Av — V1( a1))+
+ G 2 ( x — a 2 ) • e 2 ( A + z ‘ + d 2 A v — V ( a 2 ))
V2 (x) = G3 (x — a3 )• e3 (A + z3 — d3AV — V2 (a3 )) +
+ G4 (x — a 4) • e4 (A + z 4 + d4 Av — V2 (a 4))
и удовлетворять следующим краевым условиям
G , ( ■ a, ) = G , (l — a , ) = 0, dG ( ■ a , ) = dG ( l — a , ) = 0. dx dx
Доказательство.
Запишем уравнение один из системы (16) в следующем виде: l
V (x) = J G1 (x — 5) e (A + z; — d1 Av — V (5 ))5(5 — a1) d? + 0
l
+J G, (x—5) e2 (A + z 2+ d 2 Av — V(5))5(5 — a 2) d5.
Подставим получившееся V ( x ) в левую часть уравнения (11).
Затем
умножим на v ( x , t ) и проинтегрируем по переменной x от 0 до l с заменой порядка интегрирования. Тогда с учетом (14), мы получим:
ll
, d4G ( x — 5 ), b —’ 4 ) *
0 0
* e ( A + z \ —
dx
d 1 Av — V1 (5)) 5 (5 — a1) +
/ 2^/ dd4g2(x — 5),
+(—to G2 (x — 5) + b----------) *
dx
* e 2 (A + z \ + d 2 Av — V (5)) 5(5 — a 2)] d5v( x, t) dx =
l
= J[ei (A + zi - di A, - Vi (5)) 5 (5 - ai )* 0
(L 2^z LdG(x-^ч.^
* J ( - ® 2 G ( x - ^ ) + b ----1—4----) , ( x , t ) dx +
I0 dx4
+ e 2 ( A + z 2 + d 2 А ф - V ( ^ ) ) 5(^ - a 2 ) *
* [( - ® 2 G 2( x - ^ ) + b 2( x ——) , ( x , t ) dx ] d e =
I0 dx4
zz
= J[ei (A + z’ - d 1 A, - V, (5))5 (^ - ai )J,(x, t)5 (x - ^)dx + 00
I
+ e2 (A + z\ + d2A, - V (^))5(^ - a2) J,(x,t)5(x - ^)dx]de =
= e i ( A + z ’ - d i A , - V i ( a i ) ) , ( a i , t ) + e 2 ( A + z 2 + d 2 A , - V ( a 2 , t ) ) , ( a 2 ), что соответствует правой части первого соотношения из (ii). Доказательство второго соотношения из (i6) для функции V , ( x ) получается аналогично. Что и требовалось доказать.
Заключение
В данной работе была рассмотрена возможность применения единого подхода исследования свободных колебаний, ранее предложенного при исследовании систем, состоящих из твердых тел, прикрепленных к одному стержню, применительно к малоизученным системам твердых тел, прикрепленных к двум стрежням. Для этого была построена математическая модель, которая в свою очередь так же имеет вид ГСДУ вследствие использования вариационного принципа Гамильтона — Остроградского. Также была сформулирована и доказана теорема о представлении решений вспомогательной дифференциально-алгебраической системы уравнений, на основе которой в дальнейшем строится уравнение частот, аналогично [2, 4]. В дальнейшем планируется обобщение полученных ранее результатов для систем твердых тел, закрепленных на двух и более стержнях. Подобные модели широко используются в машиностроении и аэродинамике. Например, они могут найти применение в области исследования систем виброзащиты объектов.
Список литературы Гибридная система дифференциальных уравнений, описывающая твердое тело, прикрепленное к двум упругим стержням
- Мижидон А. Д., Мижидон К. А. Собственные значения для одной системы гибридных дифференциальных уравнений // Сибирские электронные математические известия. 2016. Т. 13. С. 911-922.
- Мижидон А. Д. Теоретические основы исследования одного класса гибридных систем дифференциальных уравнений // Математический анализ. Итоги науки и техн. Сер. Соврем. мат. и ее прил. Темат. обз. 2018. Т. 155. С. 38-64.
- Мижидон А. Д. Гибридные системы дифференциальных уравнений в приложении к исследованию одного класса механических систем с сосредоточенными и распределенными параметрами // XII Всероссийский съезд по фундаментальным проблемам теоретической и прикладной механики: сборник трудов: в 4 томах. Т. 1: Общая и прикладная механика. Уфа: РИЦ БашГУ, 2019. С. 21-23.
- Мижидон А.Д. Об одной дифференциально-алгебраической системе уравнений с сингулярными коэффициентами // Динамические системы, оптимальное управление и математическое моделирование: материалы международного симпозиума, посвященного 100-летию математического образования в Восточной Сибири и 80-летию со дня рождения профессора О. В. Васильева / ответственный редактор В. Г. Антоник (Иркутск, 5-12 октября 2019 г.). Иркутск: Изд-во ИГУ, 2019. С. 155-159.
