Гидрофицированное амортизационно-натяжное устройство с автоматизированной системой управления для гусеничных ходовых систем тракторов

Автор: Федоткин Роман Сергеевич, Крючков Виталий Алексеевич, Овчаренко Александр Сергеевич, Богданов Кирилл Андреевич
Рубрика: Расчет и конструирование
Статья в выпуске: 4 т.18, 2018 года.
Бесплатный доступ
В рамках тенденции развития ресурсо- и энергосберегающих технологий для сельскохозяйственного производства отмечена необходимость и возможность модернизации конструкции ходовых систем тяговых, транспортных и транспортно-технологических средств в плане их адаптации к особенностям сельскохозяйственной экосистемы. Применительно к гусеничной технике этого можно достичь в том числе за счет создания исполнительных механизмов и развитой системы управления изменением отдельных параметров гусеничной ходовой системы, в частности созданием, поддержанием и изменением усилия предварительного статического натяжения гусениц в зависимости от условий и режимов движения машины. Приведены принципы выбора оптимальной величины усилия предварительного статического натяжения гусениц. Проведен анализ экспериментальных данных и установлено, что величины предварительного статического натяжения и колебаний растягивающих усилий в гусеничном обводе при движении трактора могут достигать больших значений, увеличивающихся с усложнением условий и режимов движения машины. Это доказывает необходимость применения амортизационно-натяжных устройств с элементами автоматизации и интеллектуализации. Проведенный обзор и анализ распространенных конструкций амортизационно-натяжных устройств гусеничных машин с элементами автоматизации позволил выявить ряд их недостатков, включая их реакцию исключительно на возмущение от внешней среды, приведенное к штоку гидроцилиндра, а не на условия и режимы движения как таковые. Предложена принципиальная схема, общее устройство и принцип работы гидрофицированного амортизационно-натяжного устройства с элементами автоматизации. В данной конструкции изменение усилия натяжения гусениц при движении машины происходит в зависимости от положения органов управления машиной, задаваемого оператором в соответствии с заданными условиями и режимами ее работы. Сформированы предпосылки комплексной автоматизации и интеллектуализации амортизационно-натяжных устройств тракторов.
Сельскохозяйственная экосистема, сельскохозяйственный трактор, гусеничная ходовая система, резиноармированная гусеница, гидрофицированное амортизационно-натяжное устройство, система управления, автоматизация, интеллектуализация
Короткий адрес: https://sciup.org/147231725
IDR: 147231725 | УДК: 629.3.03 | DOI: 10.14529/engin180402
Shock-absorbing and tensioning hydraulic devices with automated control systems for tracked undercarriage systems of tractors
Presently, there is a trend of developing resource- and energy-saving technologies for agricultural production. This implies modernizing undercarriage systems of traction, transport and transportation vehicles to adapt them to the peculiarities of the agricultural eco-system. Tracked vehicles can achieve this due to actuators and advanced systems for controlling changes in certain parameters of tracked undercarriage systems. In particular, this can be achieved by creating, maintaining, and changing the force of preliminary static tension of tracks, depending on conditions and modes of vehicle motion. We developed the principles of selecting the optimal value of the preliminary static tension force of tracks. We analyzed the experimental data and established that values of preliminary static tension force and those of tensile force oscillations in tracked bypasses can reach large values during motion. These values increase as conditions and modes of vehicle motion get more complicated. This proves the necessity to apply shock-absorbing and tensioning devices with automation and intellectualization. We reviewed and analyzed conventional structures of shock-absorbing and tensioning automated devices in tracked vehicles. This allowed us to reveal many disadvantages, including their reaction solely to external disturbance, reduced to the hydraulic cylinder rod, and not to the conditions and motion modes. We proposed a basic diagram, general structure, and operation principle of a hydraulic shock-absorbing and tensioning automated device. In this structure, the tension force of tracks changes during motion depending on the position of vehicle controls set by the operator according to the specified conditions and modes of motion. We created the necessary prerequisites for complex automation and intellectualization of shock-absorbing and tensioning devices of tractors.
Текст научной статьи Гидрофицированное амортизационно-натяжное устройство с автоматизированной системой управления для гусеничных ходовых систем тракторов
Создание и применение в настоящее время ресурсо- и энергосберегающих технологий, и технических средств производства сельскохозяйственной продукции обуславливает необходимость совершенствования конструкции тяговых, транспортных и транспортно-технологических средств, их отдельных элементов, и максимально адаптировать их к особенностям сельскохозяйственной экосистемы.
Гусеничная техника превосходит колесную по ряду эксплуатационных показателей, включая возможность работы в различных почвенно-климатических условиях и агрозонах РФ, не оказывая существенного вредного воздействия на почву и корневую систему растений [1-8].
В частности, применение гусеничных ходовых систем (ГХС) в отличие от колесных позволяет исключить ухудшение физических и физико-химических процессов в твердой фазе почвы, в том числе газообмена, водного баланса почвы, жизнедеятельности биоактивной массы, не снижая показателя естественного плодородия [6].
Помимо перечисленного ГХС должна исключать или минимизировать срыв поверхностного слоя почвы от тяговых, тормозных и поворотных нагрузок, обеспечивать повышенную прохо- димость, плавность хода, управляемость, навесоспособность, устойчивость, приспособляемость машины под рельеф опорной поверхности и т. д.
То есть общее требование к современной ГХС состоит в исключении негативного воздействия машины на экосистему при сохранении этой машиной наилучших эксплуатационных свойств.
Учитывая данное обстоятельство, а также изменяющиеся условия внешней среды и режимы работы машины в эксплуатации, только развитая система управления с элементами автоматизации и интеллектуализации для отдельных процессов в ГХС способна обеспечить максимальную приспосабливаемость машины под любые почвенно-климатические условия и рельеф опорной поверхности [9, 10].
Для ГХС можно выделить несколько возможных с точки зрения автоматизации и интеллектуализации процессов, одним из которых является процесс создания, поддержания и изменения усилия предварительного статического натяжения (УПСН) гусениц, исполнительным механизмом для которого является амортизационно-натяжное устройство (АНУ).
АНУ в значительной степени влияет на устойчивость работы гусеничного обвода (ГО) и надежность ГХС в целом, так как обеспечивает удержание гусеницы от выхода из зацепления с опорными, направляющими и ведущими колесами (препятствует спаданию гусеницы); минимизирует значения амплитуд колебаний ветвей гусеницы; предотвращает многократные перегрузки гусениц при перематывании [1, 2, 7, 11].
Таким образом, современная конструкция АНУ должна обеспечивать возможность создания, поддержания и изменения УПСН гусениц в зависимости от условий и режимов движения машины, изменяющихся в процессе эксплуатации.
Данный факт указывает, что создание конструкций АНУ, оснащенных системой управления процессом с элементами автоматизации и интеллектуализации, является весьма актуальной задачей.
Цель работы состоит в разработке конструкции гидрофицированного АНУ с автоматизированной системой управления для гусеничных ходовых систем тракторов на основе опыта испытаний и эксплуатации гусеничной техники и изучения передовых зарубежных аналогов; в формировании научно-технического задела для перехода к комплексной автоматизации процесса создания, поддержания и изменения оптимальной величины УПСН гусениц в зависимости от условий и режимов работы машины, изменяющихся в процессе эксплуатации (включая почвенноклиматические и дорожные условия); в максимальном приспособлении машины под сельскохозяйственную экосистему при сохранении на высоком уровне ее эксплуатационных показателей.
Материалы и методы
В основе исследования лежит опыт разработки и эксплуатации ходовой системы (рис. 1) сельскохозяйственного трактора общего назначения НАТИ-04 с резиноармированными гусеницами (РАГ) производства Bridgestone.
Опытная эксплуатация проводилась в полевом хозяйстве на территории р.п. Теряево Волоколамского района Московской области на различных почвенных фонах, в том числе грунтовой дороге и поле, подготовленном под посев.
В процессе экспериментальных исследований проводился контроль изменения значения давления в гидроцилиндре АНУ трактора и соответственно растягивающих усилий в ГО, влияющих на величину УПСН гусеницы, при движении трактора по различным опорным поверхностям на транспортных скоростях [2].
Установленное на тракторе АНУ представляет собой механизм натяжения в виде гидроцилиндра (рис. 2), не связанного с гидросистемами трактора и заполненного консистентной смазкой, и амортизационное устройство – механизм сдавания, в виде предварительно поджатой пружины.
Регулировка натяжения данным устройством осуществляется посредством ручного нагнетания через пресс-масленку 4 или сбросом из полости поршня 3 гидроцилиндра 2 консистентной смазки. Цилиндр 2 через кривошип передает усилие на ось направляющего колеса. Для предохранения от перегрузок в устройство установлен клапан в виде мембраны 5. При возникновении в гидросистеме избыточного давления, например, при попадании в ГО габаритного элемента дорожного покрытия, смазка пробивает мембрану 5 и выбрасывается из гидроцилиндра наружу – в почву. Для восстановления работоспособности системы необходима замена мембраны и повторное ручное создание необходимой величины УПСН.
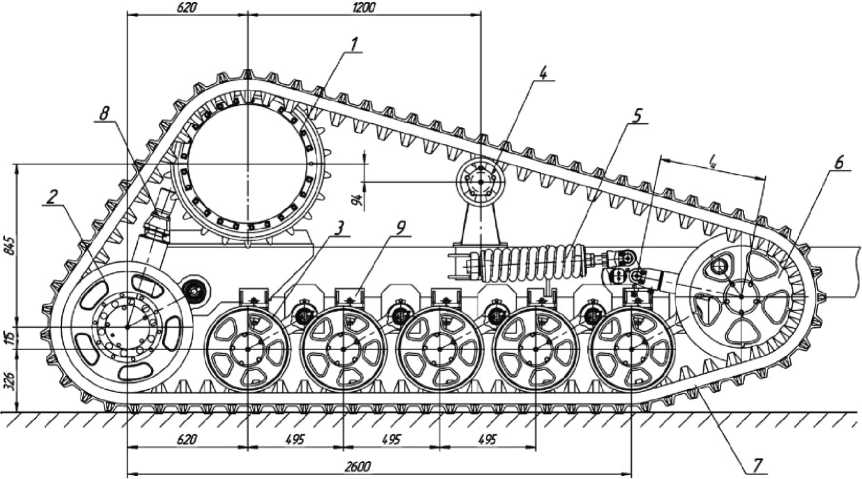
Рис. 1. Ходовая система сельскохозяйственного трактора общего назначения НАТИ-04: 1 – ведущее колесо; 2, 3 – опорные катки в сборе с балансирами подвески; 4 – направляющий ролик; 5 – АНУ; 6 – направляющее колесо в сборе с рычагом качания; 7 – РАГ 645×125×74 Bridgestone; 8, 9 – ограничители хода опорных катков; l ц – расстояние между осями цилиндра, зависящее от хода штока
Приборная база для проведения экспериментальных исследований описана в работе [2].
Кроме того, для разработки конструкции гидрофицированного АНУ проведен обзор и анализ существующих конструкций АНУ с автоматизированной системой управления процессом.
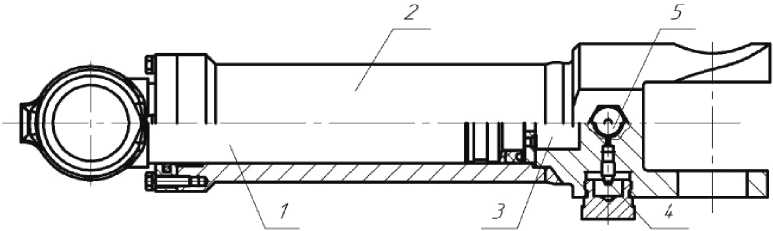
Рис. 2. Натяжное устройство сельскохозяйственного трактора общего назначения НАТИ-04: 1 – шток гидроцилиндра натяжного устройства; 2 – гидроцилиндр натяжного устройства; 3 – полость поршня гидроцилиндра; 4 – пресс-масленка; 5 – предохранительный клапан-мембрана
Разработка конструкции гидрофицированного А Н У и настоящая работа проводятс я в соответствии с современными тенденциями развития сельскохозяйственного машиностроения, в том числе со Стратегией развития сельхозмашиностроения РФ и постановление м Правительства РФ № 1632-р о цифровой экономике.
Результаты и обсуждение
Оптимальное значение УПСН гусениц для РАГ выбирается минимальным, но обеспечивающим устойчивую работу ГО. Избыточное значение У П СН с одной стороны о беспечива е т устойчивую работу ГО, уменьшение поперечных колебаний ветвей, исключение возможности схода катков с беговых дорожек и спадания гусеницы при больших тяговых нагрузках и маневрировании машины. С другой стороны, проявляется снижение ходовых качеств машины: повышение сопротивления движению, расхода топлива (потери мощности двигателя на перематывание гусениц), износа элементов ГО, уменьшение угла преодолеваемого подъема, долговечности гусеницы, КПД ГХС в целом. Недостаточное же УПСН может привести к спаданию гусеницы, ее уводам, приводящим к ускоренному износу и нарушению работоспособности зацепления [2, 7, 11].
Исходя из этих соображений, оптимальную величину УПСН рекомендуется задавать равной сумме всех растягивающих усилий в ГО, в том числе тягового (тормозного) усилий, натяжения от центробежных сил с учетом некоторого запаса на динамику (до 30 %) [2].
Так, при опытной эксплуатации трактора общего назначения НАТИ-04, ходовая система которого представлена на рис. 1, установлено, что оптимальное значение УПСН для РАГ одного борта составляет 2 000-2 500 кгс [2].
Создать такое усилие с помощью конструкции АНУ, представленной на рис. 2, проблематично даже при воздействии одновременно нескольких человек на ручное устройство нагнетания консистентной смазки.
Решением данной проблемы может быть возимая насосная станция либо гидрофицированное амортизационно-натяжное устройство (ГАНУ) с автоматизированной системой управления.
Кроме того, проведенные экспериментальные исследования показали, что даже при установившемся движении трактора по полю, подготовленному под посев, и грунтовой дороге в транспортном диапазоне скоростей размах давлений в цилиндре, а, следовательно, и растягивающих усилий в ГО, может достигать четырех раз (рис. 3).
Размах давлений в цилиндре при движении машины в горку/с горки, с заглубленным отвалом, т. е. при работе в повторно-переменном тяговом, тормозном и даже стоповом режиме, достигает еще больших значений [2].
Вышесказанное указывает на необходимость не только создавать, но поддерживать и изменять оптимальную величину УПСН в зависимости от условий и режимов движения машины. Этого невозможно достичь с помощью АНУ, управляемых вручную - мускульной силой оператора, как установленное на тракторе НАТИ-04. Более того, такие АНУ имеют значительные потери на трение в шарнирах, что снижает их надежность в целом [2, 11].
Очевидна необходимость создания, как минимум, автоматизированного АНУ с дальнейшей комплексной автоматизацией - созданием системы интеллектуального управления натяжением гусениц.
Большинство производителей тяговых, транспортных и транспортно-технологических средств предпочитают для удешевления конструкции машин в целом применять наиболее простые АНУ в виде винтов, по сути представляющих собой лишь натяжное устройство без упруго-демпфирующих элементов. Для РАГ, повсеместно заменяющих сегодня металлические звенча-тые гусеницы, применение подобных механизмов недопустимо, учитывая необходимость обеспечения высокого ресурса работы и надежности машины в целом.
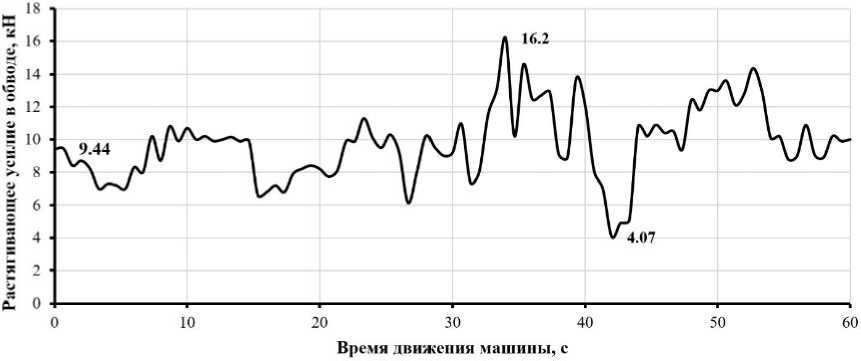
Рис. 3. Колебания суммарного растягивающего усилия в гусеничном обводе при движении трактора на повышенной транспортной передаче по полю, подготовленному под посев
Такие механические и механизированные АНУ за счет наличия передаточных механизмов в принципе позволяют обеспечить установку оптимальной величины УПСН гусеницы вручную, однако не обладают каким-либо средствами контроля величины УПСН, ее изменения и поддержания в процессе движения машины в зависимости от режимов и условий ее работы.
При таких обстоятельствах наиболее перспективными являются АНУ гидравлического типа с элементами автоматизации, обеспечивающими во з можность простой установки величины УПСН, а также в некоторой степени его поддержани я и изменения с учетом изменяющихся нагрузок в ГО в зависимости от условий и режимов движения машины [12–15].
Одним из возможных вариантов таких устройств являются системы натяжения гусениц типа GEHL IdealTrax, применяемая на мини-погрузчиках и дорожно-строительной технике [16].
Система не позволяет изменять УПСН в зависимости от условий и режимов движения погрузчика, а лишь упрощает его установку и регулировку и соответственно монтаж/демонтаж гусениц. Это возможно за счет наличия автоматизированного гидропривода, управление которым осуществляет оператор, воздействуя на тумблер, расположенный вне кабины погрузчика .
В работах [12, 13] представлены ГАНУ сельскохозяйственных и дорожно-строительных машин, содержащие помимо типового комплекса гидроагрегатов и гидроаппар а тов, несколько гидроаккумуляторов разной емкости, что обеспечивает более плавную работу системы в широком диапазоне динамических нагрузок. То есть каждый гидроаккумулятор служит для смягчения и демпфирования нагрузок определенной природы. Благодаря этому система может реагировать набольшие изменения растягивающих усилий в ГО, в том числе вызванные податливостью и неравномерностью перематывания РАГ, вибрациями в ГО от вращения элементов ГХС, возмущениями от профиля опорной поверхности и пр.
ГАНУ для промышленных машин (рис. 4), в том числе работающих в режиме реверса, представленное в работе [14, 15], имеет систему управления натяжением гусениц для исключения возникновения повышенных нагрузок гусениц. Система содержит контроллер управления усилием натяжения посредством воздействия на натяжные гидроцилиндры и различные датчики, включая датчик давления в цилиндрах машины, датчики определения направления движения машины, в том числе датчик включенной передачи и датчик относительного положения машины (в том числе основанном на приеме GPS-сигнала), дат ч ик крутящего момента в трансмиссии. Такие системы управления позволяют как минимум учитывать режимы движения машины передним и задним ходом.
В данных вариантах ГАНУ отсутствует выраженное разделение гидролиний бортов ГХС. При движении машины на повороте при любом типе т р ансмиссии необходима разная скорость и в некоторых случаях направление вращения гусениц каждого борта. Это обстоятельство говорит об ограниченности представленных ГАНУ в плане уч е та режимов движения машины – управление натяжением гусениц осуществляется только в зависимости от направления движения машины – передним или задним ходом.
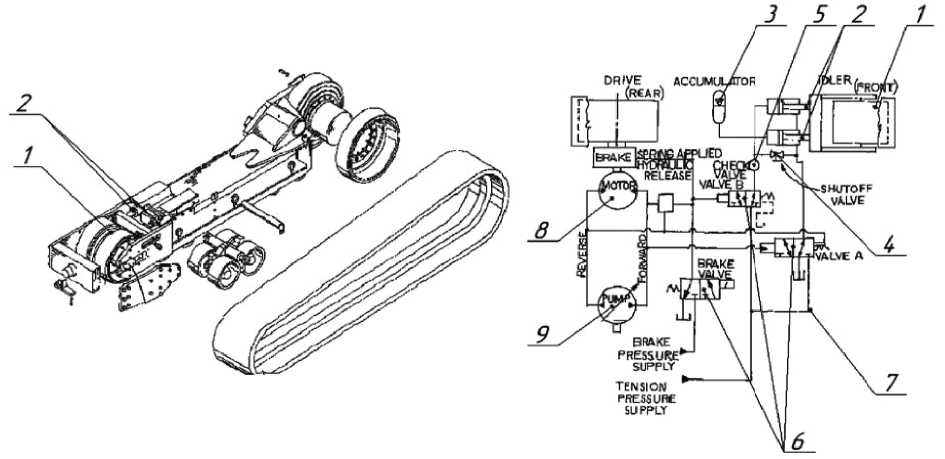
Рис. 4. Гидрофицированное амортизационно-натяжное устройство для строительной техники: 1 – натяжное (направляющее колесо); 2 – двуполостные гидроцилиндры двустороннего действия; 3 – гидроаккумулятор; 4 – запорный проходной кран; 5 – обратный клапан; 6 – гидрораспределители; 7 – гидролинии; 8 – насосная установка; 9 – гидростатическая трансмиссия
В целом рассмотренные конструкции ГАНУ представлены совокупностью типовых гидроагрегатов и гидроаппаратов, в некоторых случаях содержа т контроллеры управле н ия с комплексом датчиков. Отдельные из них привязаны к гидростатической трансмиссии и ограничены соответственно применением на таких машинах. Кроме того, рассм о тренные ГАНУ, если и реализуют возможность поддержания и изменения величины УПСН гусениц, то не для полного спектра, а лишь для отдельных условий и режимов движения машины. В основном только для переднего и зад н его хода.
Главным же общим недостатком рассмотренных конструкций ГАНУ является реактивность систем, т. е. они реагируют исключительно на возмущение от внешней среды на направляющее колесо и соответственно гидроцилиндр.
Отсюда следует, что наиболее перспективными в плане создания представляются конструкции АНУ, где настройка его параметров происходит до взаимодействия с внешней средой, т. е. как минимум автоматизировано – за счет воздействия оператора на органы управления машиной независимо от типа трансмиссии, как максимум – ав т оматически – за счет п редварите л ьного машинного анализа почвенно-климатических и дорожных условий.
Схема предлагаемого ГАНУ, представленная на рис. 5, реализует задачу миним у м. Конструкция содержит: насосную установку (фильтр 1 и насос 2) с редукционным клапаном 3; обратные клапаны 4; два гидрораспределителя 5 с элек т ромагнитным управлением одностороннего действия; гидроцилиндры 7 одно- или двустороннего действия; гидроаккумуляторы 8; запорную арматуру 9; бак для рабочей жидкости 10.
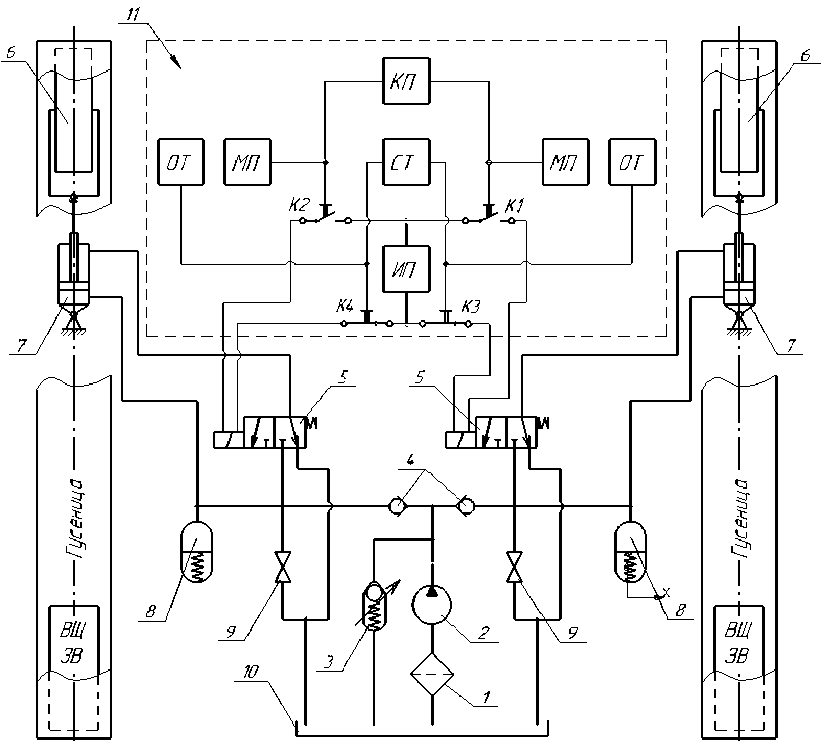
Рис. 5. Схема предлагаемого гидрофицированного амортизационно-натяжного устройства гусеничной машины: 1 – фильтр; 2 – насос нерегулируемый нереверсивный; 3 – клапан редукционный регулируемый; 4 – клапаны обратные; 5 – распределители гидравлические двухпозиционные с возвратными пружинами и электромагнитным управлением; 6 – узлы натяжных колес ходовой системы машины; 7 – гидроцилиндры двуполостные одностороннего (двустороннего) действия; 8 – аккумуляторы пружинные гидравлические; 9 – запорная арматура; 10 – емкость для рабочей жидкости (гидробак); 11 – блок управления распределителями; ВЩ ЗВ – ведущая звездочка; КП – коробка переключения передач; СТ – стояночный тормоз;
ОТ – остановочный (рабочий) тормоз; МП – механизм поворота; ИП – источник питания
Управление ГАНУ осуществляется блоком 11, который содержит источник питания ИП, датчик коробки передач КП, датчик стояночного тормоза СТ, датчики механизмов поворота МП, датчики тормозной системы ОТ, ключи электроцепи управления гидрораспределителем правого борта К1 и К3 и ключи электроцепи управления гидрораспределителем правого борта К2 и К4.
Гидроцилиндры 7 установлены по бортам машины, причем шток каждого цилиндра шарнирно связан с узлами натяжных колес 6 машины, а корпуса цилиндров – с рамой машины. Полости штоков цилиндров соединены с гидрораспределителями 5, которые в зависимости от своего положения соединяют полости штоков цилиндров с гидробаком 10 напрямую или через запорную арматуру 9, позволяющую сливать рабочую жидкость из поршневых полостей цилиндров. При этом в первом положении на штоке цилиндра действует усилие от давления в полости поршня, а во втором – разность усилий от давления полостей поршня и штока, так как в последнем случае полости гидроцилиндра соединяются между собой.
Датчики реагируют на режимы движения машины (вперед, назад, торможение, поворот) и управляют соответствующими ключами электроцепи. От положения последних зависит наличие либо отсутствие напряжения на выходах блока управления, которые подключены к управляющим входам гидрораспределителей 5. При этом подача напряжения осуществляется независимо для каждого борта.
Полости поршней цилиндров связаны гидромагистралями с гидравлическими аккумуляторами, которые предохраняют гусеницы от многократных перегрузок при преодолении машиной препятствий и изменении периметра ГО.
Обратные клапаны 4, с которыми также соединены полости поршней гидроцилиндров, расположены на выходе насосной установки перед запорной арматурой 9 и гидроаккумуляторами 5 и соединены с гидробаком 10 через редукционный клапан 3 и насос 2. Причем насос обеспечивает постоянную подпитку системы и может приводиться в действие различными способами, например, с помощью выходного вала двигателя, первичного вала коробки передач и т. д. Обратные клапаны 4 исключают циркуляцию рабочей жидкости между гидроцилиндрами разных бортов машины и к насосу, что обеспечивает независимую работу цилиндров бортов машины.
Регулированием усилия срабатывания редукционного клапана задается УПСН и исключается избыточное натяжение гусеницы [7].
ГАНУ обеспечивает необходимый уровень УПСН на основе сигналов датчиков в зависимости от режимов движения машины, когда влияние действующих нагрузок на УПСН гусениц различно и зависит от изменения растягивающих усилий в ГО и тягового усилия в частности.
С учетом предложенной схемы для гусеничного трактора осуществлена эскизная проработка конструкции ГАНУ (рис. 6).
Конструкция обеспечивает следующие возможности [2]:
-
1. Создание УПСН гусениц на одном или обоих бортах.
-
2. Поддержание УПСН гусениц и демпфирование толчков и ударов при движении машины по неровностям пути.
-
3. Функциональность системы в широком диапазоне динамических нагрузок.
-
4. Изменение УПСН гусениц в зависимости от направления движения машины и расположения на ней ведущих звездочек.
-
5. Изменение УПСН гусениц в зависимости от типа и рельефа дорожного покрытия.
-
6. Влияния на плавность хода (копирование рельефа местности) машиной объединени-ем/разъединением бортов ГХС.
-
7. Компенсация изменения периметра ГО вследствие работы подвески.
-
8. Принудительный сброс натяжения гусениц на одном или обоих бортах.
Устройство работает в следящем режиме, обеспечивая необходимый уровень УПСН гусениц в зависимости от сигналов датчиков и соответственно режима движения машины. Это обусловлено тем, что при движении машины влияние действующих нагрузок на величину УПСН гусениц различно и зависит от тягового усилия на ведущих звездочках, изменяющегося в зависимости от сопротивления качению. Главным образом на работу системы влияет изменение натяжения участков ветвей гусеницы, взаимодействующих с натяжными колесами машины – свободные и наклонные ветви.
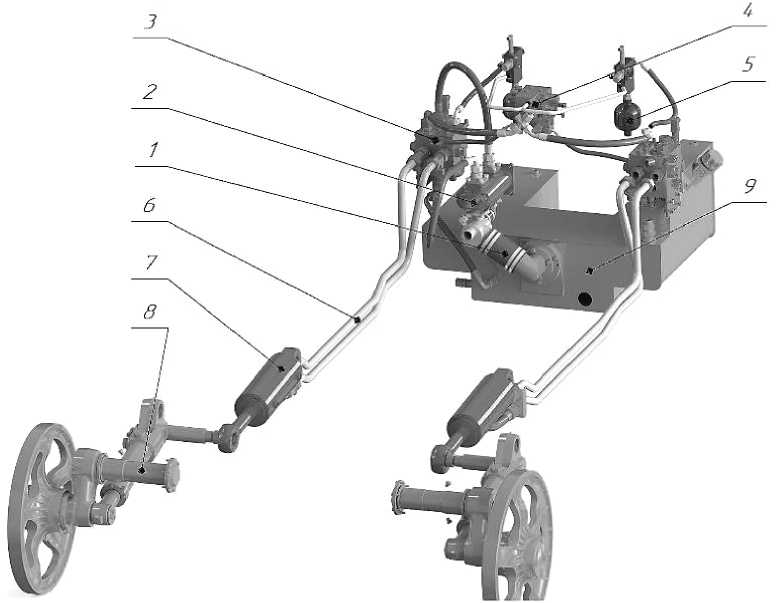
Рис. 6. Проработка конструкции гидрофицированного амортизационно-натяжного устройства:
1 – фильтр-заборник; 2 – гидронасос; 3 – гидрораспределители; 4 – клапанная коробка; 5 – гидроаккумуляторы; 6 – трубопроводы; 7 – гидроцилиндры; 8 – ленивцы; 9 – гидробак
Предлагаемое ГАНУ возможно устанавливать н а машины с ГХС любой компо н овки (т. е. с любым расположением ведущих звездочек) с уч е том возможных режимов работы машины. Принципиальное различие в конструкции ГАНУ пр и изменении компоновки машины будет состоять лишь в нормально включенном положении ги д рораспределителей 5 (см. рис. 5).
В настоящей работе описан принцип действия ГАНУ машины с задн и м расположением ведущих звездочек на следующих основных режимах ее работы [7].
-
1. Предварительное статическое натяжение осуществляется на стоянке трактора при запущенном двигателе. В этом случае УПСН гусениц определяется настройкой редукцио н ного клапана, который поддерживает соответствующее давление в гидросистеме и с оединен через гидрораспределители с поршневыми полостями гидроцил и ндров. При этом шток о вые полос т и цилиндров соединены с гидробаком (направлены на слив).
-
2. Передний ход прямолинейного движения. Здесь составляющие тягового усил и я на ведущих звездочках уменьшают УПСН гусениц, а составляющие усилий вне ш них сопротивлений – увеличивают его. В этом случае при поступлении соответствующего сигнала с датчика коробки передач полости гидроцилиндров соединяются меж д у собой (гидрораспределители включаются во второе положение), что облегчает сдавание. При увеличении тягового усилия велич и на УПСН уменьшается и для ее оптимизации происходит подпитывание системы на с осной установкой до предела, определяемого редукционным клапаном.
-
3. Задний ход прямолинейного движения, тор м ожение и стоянка. Составляющие тягового усилия на ведущих звездочках и усилий внешних сопротивлений увелич и вают УПСН гусениц, т. е. давление в полостях поршней цилиндров повышается, как и в случае экстренног о торможения под действием инерции машины. В этом случае рабочая жидкость из полостей штоков цилиндров полностью сливается в гидробак, а поршневые полости запираются, ограничивая сдавание штоков (гидрораспределители включаются в первое положение под д ействием возвратных пружин). Таким образом обеспечивается работоспо с обность гусеницы в з ацеплении и предотвращается ее спадание с обвода. При этом блок уп р авления распределителями работает аналогично при торможении на переднем и заднем ходе машины, на горизонта л ьной или наклонной
-
4. Поворот машины с радиусом B/2 (вокруг центра масс). В этом случае тяговые усилия на гусеницах равны, но разнонаправлены, поэтому ГАНУ, реагируя на датчики механизмов поворота и коробки передач в зависимости от направления вращения, оставляет забегающий борт в режиме движения передним ходом, а отстающий борт переводит в режим движения задним ходом.
-
5. Поворот машины с радиусом B и больше. В этом случае отстающая гусеница заторможена или притормаживается, поэтому контур системы забегающего борта работает как при переднем ходе машины, а контур системы отстающего борта – как при торможении машины.
поверхности, а также стоянке машины, даже на уклоне при разряженной аккумуляторной батарее или без нее.
Необходимо учитывать, что описанные в п. 2–5 алгоритмы работы ГАНУ будут преобразованы в обратные по отношению к описанному при установке устройства на машину с передним расположением ведущих звездочек.
Более подробно общее устройство и принцип работы предлагаемой конструкции гидрофици-рованного АНУ изложены в работе [7].
Естественно предложенная схема может быть адаптирована под любой, не только механический, тип трансмиссии.
Использование такого ГАНУ возможно как на существующих образцах гусеничной техники без внесения существенных изменений в конструкцию, так и на вновь создаваемых машинах. В последнем случае целесообразна интеграция гидросистемы ГАНУ с гидросистемой машины [9].
Таким образом, предлагаемая конструкция представляет собой ГАНУ активного типа, реагирующее не на составляющие внешнего воздействия, приведенного к направляющему колесу, а на режимы движения машины, точнее на положение органов управления движением машины, задаваемое оператором.
Достоинством предложенного ГАНУ является существенное облегчение условий труда оператора в части управления натяжением гусениц и за счет автоматического реагирования АНУ на изменение режима движения машины (действия оператора), а также повышение надежности ГХС с обеспечением отчасти ее приспособления к почвенно-климатическим условиям. Тем не менее устройство реагирует не столько на почвенно-климатические условиях, не на среду и опорную поверхность, а на действия оператора [9].
В этом и состоит главный недостаток системы – дублирование действий человека. Оператор не может в достаточной степени следовать правилам эксплуатации машины (правилам выбора режимов) в зависимости от условий внешней среды.
В связи с этим основным направлением дальнейшей работы является повышение эффективности функционирования ГАНУ за счет обеспечения его реагирования на условия движения машины (вид, состояние, свойства почвенного фона и т. д.) и максимальное приспособление ГХС к этим условиям с исключением человеческого фактора [9, 10].
Из этого вытекает направление дальнейшей работы по совершенствованию конструкции ГАНУ. Оно состоит в сканировании чувствительными элементами почвенно-климатических и дорожных условий, включая рельеф и вид опорной поверхности, анализе этих данных и с учетом рекомендованных и заданных режимов работы уже осуществлять управление натяжением гусениц машины.
Этого можно достичь только за счет комплексной автоматизации процесса управления натяжением гусениц, т. е. создания соответствующей интеллектуальной системы управления.
Выводы
По итогам исследования можно сделать следующие выводы:
-
1. Результаты экспериментальных исследований тракторного АНУ гидромеханического типа выявили существенный размах колебаний растягивающих усилий в ГО машины при ее движении даже на установившемся режиме работы на различных опорных поверхностях. Это обуславливает необходимость не только создания, но поддержания и изменения УПСН гусениц в зависимости от условий и режимов движения машины, что осуществимо только при наличии автоматизированной системы управления АНУ с дальнейшим переходом к комплексной автоматизации и интеллектуализации процесса натяжения гусениц.
-
2. Обзор и анализ распространенных конструкций АНУ гусеничных машин, в том числе гидрофицированных с системой автоматизированного управления процессом натяжения гусениц позволил:
-
• выявить их основной недостаток в виде отсутствия учета условий работы и неполный учет режимов работы машин, ограниченный только передним и задним ходом. Недостаток обусловлен реактивностью систем, т. е. они реагируют исключительно на возмущение от внешней среды на направляющее колесо и соответственно шток гидроцилиндра;
-
• выявить наиболее перспективные в плане создания конструкции АНУ, в которых настройка параметров происходит до взаимодействия с внешней средой, т.е. как минимум автоматизировано – за счет воздействия оператора на органы управления машиной независимо от типа трансмиссии, как максимум – автоматически – за счет предварительного машинного анализа почвенно-климатических и дорожных условий.
-
3. Предложенная конструкция ГАНУ с элементами автоматизации в виде принципиальной схемы и эскизной проработки конструкции, описания общего устройства и алгоритмов работы при различных условиях и режимах движения машины представляет собой систему активного типа, т. е. реагирует не на составляющие внешнего воздействия, приведенного к направляющему колесу, а на режимы движения машины, точнее на положение органов управления движением машины, задаваемое оператором.
-
4. Анализ недостатков предложенного ГАНУ позволил сформулировать направление дальнейших исследований как повышение эффективности функционирования ГАНУ за счет обеспечения его реагирования на условия движения машины (вид, состояние, свойства почвенного фона и т. д.). Этого можно достичь за счет сканирования чувствительными элементами почвенноклиматических и дорожных условий и с учетом рекомендованных и заданных режимов работы уже осуществлять управление натяжением гусениц машины, что обеспечит приспособление ГХС к этим условиям с полным исключением человеческого фактора.
Список литературы Гидрофицированное амортизационно-натяжное устройство с автоматизированной системой управления для гусеничных ходовых систем тракторов
- Тракторы. Конструкция / В.М. Шарипов [и др.]. - М.: Машиностроение, 2012. - 790 с.
- Федоткин, Р.С. Расчетно-экспериментальные методы оценки нагруженности и долговечности резиноармированных гусениц сельскохозяйственных тракторов: дис. … канд. техн. наук / Р.С. Федоткин. - М., 2015. - 204 с.
- Сравнение тяговых показателей и долговечности гусеничных движителей сельскохозяйственных тракторов / Н.А. Щельцын [и др.] // Известия МГТУ «МАМИ». - 2017. - № 4 (34). - С. 81-88.
- К вопросу создания отечественного гусеничного трактора для современного сельскохозяйственного производства / В.М. Шарипов [и др.] // Тракторы и сельхозмашины. - 2018. - № 2. - С. 17-25.
- Резиноармированные гусеницы сельскохозяйственных тракторов. Жесткость при растяжении и изгибе / Р.С. Федоткин [и др.] // Известия МГТУ «МАМИ». - 2016. - № 2 (28). - С. 32-38.
- Зернокормоуборочные комбайны (основы теории и конструкторско-технологические устройства) / А.М. Емельянов [и др.]; под общ. ред. А.М. Емельянова. - Благовещенск: ДальГАУ, 2013. - 285 с.
- Пат. 146163 Российская Федерация. Гидрофицированное натяжное устройство / В.М. Шарипов, К.И. Городецкий, Р.С. Федоткин и др.; заявитель и патентообладатель ОАО «НИИ стали». - № 2014116796/11; заявл. 25.04.2014; опубл. 10.10.2014; Бюл. № 28.
- Lamande M. Risk assessment of soil compaction in Europe / M. Lamande, M.H. Greve, P. Schjonning // Rubber tracks or wheels on machinery. - Netherlands, Amsterdam: ELSEVIER SCIENCE BV, 2018. - Thom 167. - C. 353-362.
- Средства автоматизации для управления сельскохозяйственной техникой / А.Ю. Измайлов [и др.] // Сельскохозяйственные машины и технологии. - 2017. - № 3. - С. 3-9.
- Автоматика - этап индустриализации села / И.Ф. Бородин [и др.] // Вестник Российской академии сельскохозяйственных наук. - 2008. - № 1. - С. 11-13.
- Влияние трения в шарнирах на работоспособность амортизационно-натяжного устройства гусеничного движителя / С.С. Бульбутенко [и др.] // Известия МГТУ «МАМИ». - 2013. - Т. 1. - № 2 (16). - С. 12-19.
- Patent EP 1361143 (B1) Endless Track Tension Management System / Carlos J.A. Verheye, Thierry E.G. Devriese, Tom A. De Lathauwer, Jean-Pierre Vandendriessche. - 2003.
- Patent US 6106082 (A) Track tension system / Craig Gustin. - 2000.
- Patent US 6431008 (B1) Method and apparatus for determining a slack-side tension of a track on an earthworking machine / Thomas Oertley, Dennis Shookman, Jin Suzuki, Daniel Mikrut. - 2002.
- Patent US 6224172 (B1) Tensioning device for a tracked vehicle / Jon Goodwin. - 2001.
- Gehl Ideal Trax [Электронный ресурс] // Ideal Trax™ Automatic Track Tensioning System. - http://www.gehl.com/idealtrax (дата обращения: 24.10.2018).
