Гладкие модели биологических популяций

Автор: Лобанова Екатерина Валерьевна, Медведева Наталия Борисовна
Рубрика: Математическое моделирование
Статья в выпуске: 2 т.7, 2014 года.
Бесплатный доступ
Предложен метод построения моделей, выражающих численность биологических популяций, на основе временных рядов. На первом этапе строится сглаженный набор эмпирических данных, который отражает общие черты реального временного ряда. Это достигается посредством построения оптимизационного сплайна - кусочно-полиномиальной функции, имеющей минимальное отклонение от эмпирических данных по методу наименьших квадратов. Далее строится система дифференциальных уравнений, правая часть которой имеет наименьшее отклонение по методу наименьших квадратов от производной оптимизационного сплайна на некоторой более частой сетке. Решение задачи Коши для построенной системы на тестовом промежутке времени берется в качестве прогноза модели. Метод применяется к конкретным временным рядам, делается оценка погрешности прогноза, исследуется зависимость погрешности от параметров метода. Кроме того метод применяется к искусственному временному ряду, содержащему случайные возмущения. Исследуется зависимость погрешности прогноза от величины возмущения.
Временной ряд, модель популяции, сплайн, метод наименьших квадратов
Короткий адрес: https://sciup.org/147159265
IDR: 147159265 | УДК: 519.6 | DOI: 10.14529/mmp140205
Smooth models of biological populations
We propose a method for constructing models to express the size of biological populations based on time series. At the first stage we construct a smoothed-out collection of empirical data reflecting the common features of an actual time series by using an optimizing spline, which is a piecewise polynomial function at the minimal distance from the empirical data in the sense of the least-squares method. Then we construct a system of ODEs which has the minimal least-squares distance from the derivative of the optimizing spline on certain finer lattice. We take the solution to the Cauchy problem for this system as the forecast by the model. We apply the method to concrete time series, estimate the error of the forecast and study its dependence on the parameters of the method. In addition, we apply the method to an artificial time series containing random perturbations. We study the dependence of error in the forecast on the size of random perturbation.
Текст научной статьи Гладкие модели биологических популяций
В данной работе строятся модели, выражающие численность биологических популяций, на. основе анализа, временных рядов [1 -6].
Особенность временных рядов в экологии состоит в том, что, во-первых, для исследования доступно незначительное число значений, поскольку, как правило, представленные эмпирические данные - это результаты измерений в течение 30 - 50 лет. Во-вторых - малая точность, потому как практически невероятно измерить численность всей популяции, вплоть до отдельной особи, на. большом ареале ее обитания. В-третьих - реакция биосферы и ее объектов на. внешние воздействия носит избирательный характер, т.е. объекты биосферы не реагирует на. все воздействия одновременно, при этом один и тот же объект биосферы в разные интервалы времени может реагировать на. одинаковые воздействия по-разному, характер и сила, наблюдаемой реакции могут не соответствовать параметрам внешних воздействий. Отсюда. - возникновение сложностей при построении вида, модели.
В связи с вышеизложенным, прежде чем приступить к моделированию по временному ряду, строится сглаженный набор эмпирических данных, который отражает лишь общие черты реального временного ряда. Это достигается посредством построения оптимизационного сплайна: весь временной интервал, в пределах которого лежат измерения наблюдаемой величины, делится на. несколько равных промежутков, на. каждом промежутке строится свой полином заданной степени, исходя из следующих условий: на. границах временных интервалов значения соседних полиномов, а. также их последовательных производных до некоторого фиксированного порядка, должны совпадать. Более того, кусочный сплайн, составленный из этих полиномов, должен быть экстремальным в своем классе, исходя из условия оптимального отклонения от эмпирических данных на. всем временном промежутке по методу наименьших квадратов. Далее, к сглаженному временному ряду применяется аналог метода. Безручко - Смирнова. [7], заключающегося в построении системы дифференциальных уравнений, решение задачи Коши для которой моделирует зависимость, выражаемую данным временным рядом.
Е.В. Лобанова, Н.Б. Медведева
В данной статье описанные методы применяются к конкретным временным рядам, выражающим численность биологических популяций, вычисляется погрешность прогноза, исследуется зависимость погрешности от некоторых параметров метода. Кроме того, метод применяется к искусственному временному ряду, содержащему случайные возмущения, исследуется зависимость погрешности прогноза от величины возмущения.
1. Сглаживание эмпирических данных
Перечислим основные элементы процедуры построения оптимизационного сплайна. Пусть задан скалярный временной ряд { v i } MQ , задающий последовательность значений размера популяции на протяжении определенного количества лет, t i = i (i = 0,..., M) -временная сетка, M - натуральное число. Предположим, что M = lk, где l > 1,k > 1 -натуральные числа. Тем самым весь временной интервал I = [0, M], в пределах которого лежат измерения наблюдаемой величины, делится на к равных промежутков I = U k=i I i , на каждом из которых доступны, следовательно, l + 1 значений. По этим значениям строятся полиномы y ni (t) = П=0 сО c ij • t j заданной степени n, исходя из следующих соображений: в каждой граничной точке t i · l промежутков I i соседние полиномы должны принимать одинаковые значения вместе со всеми своими производными до заданного порядка d:
Mt i ^ i ) = ^Aki), ^tkt i ^ i ) = ^(k i ), ..., a id (t i ^ i ) = ^H-ifei ), i = 1,...,k - 1
Кусочный сплайн a n (t), составленный из функций a ni (t),. .. ,a nk (t):
^ n (t) = <
^ nl (t), ^ n2 (t),
t G I l , t G I 2 ,
, ^nk(t), t G Ik, должен быть экстремальным в своем классе, исходя из условия оптимального отклонения сплайна от эмпирических данных и его производных от нуля на всем временном промежутке:
M dM
^ (^ n (t i ) - v i ) 2 + ££ (^ ( t i )) 2 ^ min . i=0 s=1 i=0
Такой способ построения позволяет однозначно определить все коэффициенты c Io ,...,C kn оптимизационного сплайна.
2. Реконструкция систем дифференциальных уравнений
Метод моделирования по временным рядам с помощью построения системы обыкновенных дифференциальных уравнений, разработанный Безручко – Смирновым [7], состоит в следующем. В случае, если исходный временной ряд – векторный размерности D, то вычисляются разностные производные первого порядка компонент этого ряда. Модель строится в виде задачи Коши для системы дифференциальных уравнений
ЗС i (t) = F i (x i ,X 2 , ...,X D ),
ЭС 2 (t) = F 2 (x i ,X 2 , ...,X D ),
_ X D (t) = Fd (xi,X2,...,XD ), в которой Fj, j = 1... D - многочлены некоторой фиксированной степени K с неопределенными коэффициентами, которые ищутся из условия минимального отклонения разностных
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ производных компонент временного ряда от соответствующих компонент правой части системы (2) по методу наименьших квадратов.
В случае же, если исходный временной ряд – скалярный, модель строится в виде задачи Коши для системы обыкновенных дифференциальных уравнений некоторой размерности D > 1
x I = X2, x 2 = x3,
< x 3 = x 4 , (3)
...,
, xD = F(xi, . . . ,XD), где F(xi,..., xd) — многочлен степени K, коэффициенты которого ищутся методом наименьших квадратов из условия минимального отклонения разностной производной временного ряда порядка D от значений многочлена F на наборе разностных производных временного ряда до порядка D — 1 включительно. Вопрос о выборе размерности D требует специального обсуждения.
Метод Безручко – Смирнова показал свою эффективность при моделировании временных рядов, возникающих при измерениях в технических устройствах, содержащих сотни и даже тысячи измерений.
-
3. Схема построения модели
Первый этап построения модели популяции по временному ряду – это нахождение оптимизационного сплайна, который может быть как векторным, так и скалярным. Далее применяется аналог метода Безручко – Смирнова к дисретизированному сплайну, для чего временной промежуток делится на большое количество частей N – порядка сотен или даже тысяч, таким образом получается новый сглаженный временной ряд, производные которого в точках сетки вычисляются в отличие от метода Безручко-Смирнова аналитическим дифференцированием оптимизационного сплайна в системе MAPLE.
Если временной ряд – векторный размерности D , то модель ищется в виде задачи Коши для системы (2), где
K DD
F(xi,x2,...,xD) = ^2 cj,ii,i2,...,iDnxkk, 52 ^-K, l1 ,l2,...,lD =0 k=1 k=1
– полиномы степени не выше K , коэффициенты которых ищутся для каждого j из условия минимума
N
^ ( F j ( ст П (h • iV-^D (h • i)) — ( ^ n ) ‘ ( h • i )) 2 ^ min, i =0
где ст П - оптимизационный сплайн для j -й компоненты временного ряда, h = M/N .
Когда наблюдению доступен лишь скалярный временной ряд, процедура построения системы (3) включает в себя еще один предварительный этап (по сравнению с моделированием по векторному ряду) – выбор размерности модели D , который в простейшем случае можно осуществить на основе перебора. В данной статье мы исследуем зависимость погрешности прогноза от величины D . Модель в этом случае ищется в виде задачи Коши для системы (3), где
KDD
F(xi,x2, ...,xd)= ^2 cii,i2,...,iD IJxk , 52 lfc - K,(4)
l1 ,l2,...,lD =0 k=1
Е.В. Лобанова, Н.Б. Медведева
– многочлен степени K , коэффициенты которого находятся из условия минимума
N
^ (F (ст п (Н • i), ст П (h • i),..., a D 1 (h • i)) - ^(h • i)) 2 ^ min . i=0
Качество построенной модели исследуется с точки зрения адекватности прогноза. Промежуток определения временного ряда делится на две части – тренировочную и тестовую: M = M train + M test . Для исследования погрешности прогноза оптимизационный сплайн строится не на всем промежутке I = [0, M], а на промежутке [0, M train ], далее на этом же промежутке строится система дифференциальных уравнений (2) или (3). Далее ищется численное решение задачи Коши для этой системы дифференциальных уравнений на всем промежутке I = [0, M]. Численное решение сравнивается с исходными эмпирическими данными на тестовом промежутке [M train , M ]. Ошибка прогноза в случае скалярного временного ряда вычисляется по формуле
Е = max | x i (t i ) - V i | ,
t i G [M train ,M ]
а в случае векторного – по аналогичной формуле для каждой компоненты.
Программа построения оптимизационного сплайна, модельной системы дифференциальных уравнений, решения соответствующей задачи Коши, построения графиков и вычисления погрешности прогноза была реализована в системе MAPLE 14.
4. Реализация метода в случае одновидовой популяции
Приведем ряд демонстрационных примеров реализации вышеизложенного метода с использованием математического пакета Maple 14. В качестве одновидовой системы была выбрана популяция цапли Ardea cineria на юге Ланкашира, Англия, с указанными в табл. 1 показателями на протяжении 30 лет [8].
Показатели численности популяции цапли
Таблица 1
|
Год |
1912 |
1913 |
1914 |
1915 |
1916 |
1917 |
1918 |
1919 |
1920 |
1921 |
|
Число пар |
20 |
21 |
22 |
25 |
29 |
34 |
37 |
38 |
37 |
37 |
|
Год |
1922 |
1923 |
1924 |
1925 |
1926 |
1927 |
1928 |
1929 |
1930 |
1931 |
|
Число пар |
37 |
40 |
43 |
45 |
46 |
46 |
46 |
47 |
49 |
51 |
|
Год |
1932 |
1933 |
1934 |
1935 |
1936 |
1937 |
1938 |
1939 |
1940 |
1941 |
|
Число пар |
52 |
52 |
51 |
52 |
53 |
55 |
56 |
57 |
57 |
58 |
На основании приведенных данных был построен оптимизационный сплайн, сглаживающий эмпирические данные, на обучающем промежутке длины M train = 22 года. В качестве степеней полиномов, образующих данный сплайн, была выбрана степень n = 9, уровень гладкости сплайна d = 3. Весь обучающий временной интервал был разделен на к = 7 равных частей по l +1 =4 измерения в каждом. График полученного сплайна og(t) изображен
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
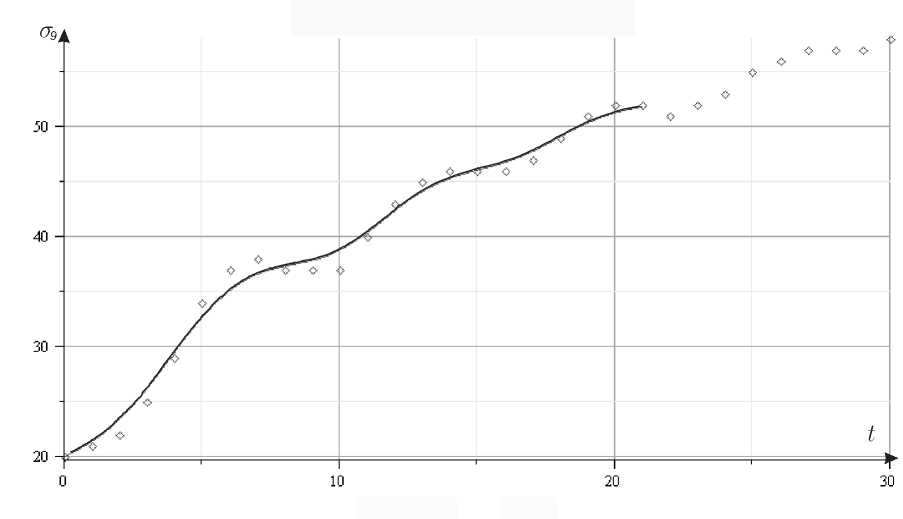
Рис. 1 . График оптимизационного сплайна a(t) для популяции цапли Ardea cineria
на юге Ланкашира, Англия, 1912 – 1941 гг.
на рис. 1. Затем выбранный промежуток был разбит на N = 300 частей, и полученные значения легли в основу нахождения методом наименьших квадратов коэффициентов системы вида (3) размерности D = 3 со степенью полинома (4) в правой части, равной K = 2:
Х 1 = Х 2 ,
< Х 2 = Х3, (6)
, Х3 = F(Х1,Х2,Хз), где F(Х1, Х2, Хз) = Со + С1Х1 + С2Х2 + С3Х1Х2 + С4Х1 + С5Х2 + С6Х1Х3 + С7Х2Х3 + С8Х2.
После того, как все коэффициенты c 0 , ..., c 8 были найдены из условия:
^ ( F ( СТ 9 ( h • i) ,^ 9 ( h • i), a % ( M • i)) — CTg ‘ ( M • i )) 2 ^ min, i=0
где h = M/N = 0,1, численным методом было получено решение системы (6) с начальными условиями Х 1 (0) = 20, Х 2 (0) = ст 9 (0), Х з (0) = ст 9 ‘ (0). Функция x i (t), является на тестовом промежутке прогнозом численности популяции английской цапли (рис. 2). Подсчитано, что в данном случае погрешность прогноза ε, вычисленная по формуле (5) не превышает двух особей.
Как можно увидеть из рис. 2 графики оптимизационного сплайна и найденного решения системы (6) практически совпадают на тренировочном промежутке, а график прогноза визуально хорошо совпадает со значениями исходной выборки на тестовом промежутке.
Для указанных выше начальных данных и значений n, d, l и D была исследована зависимость погрешности прогноза от частоты разбиения на N отрезков, по которым осуществлялось нахождение коэффициентов в условии (7). Из полученных данных (рис. 3) можно сделать вывод, что стабильное уменьшение ошибки прогноза и, следовательно, увеличение его точности достигается уже при значениях N > 500.
Е.В. Лобанова, Н.Б. Медведева
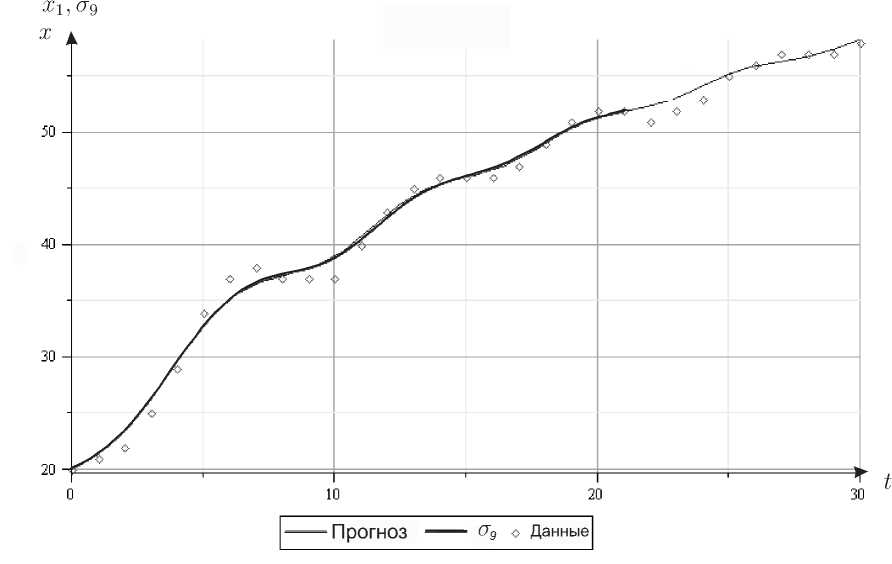
Рис. 2 . Прогноз численности популяции цапли Ardea cineria на юге Ланкашира, Англия, 1912 – 1941 гг.
Как показали также аналогичные исследования для двухвидовой популяции, существуют небольшие значения N , при которых достоверность прогноза достаточно велика (здесь это достигается, к примеру, при N = 100, N = 275, N = 400).
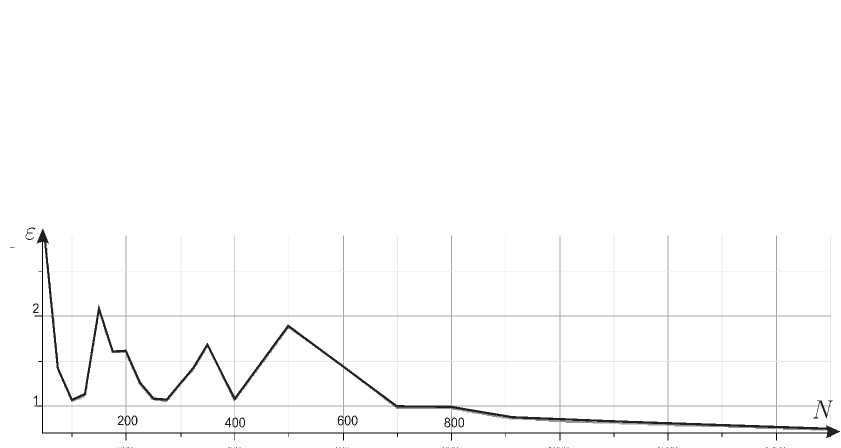
Рис. 3 . Зависимость погрешности прогноза от частоты разбиения N для численности цапли Ardea cineria на юге Ланкашира, Англия, 1912 – 1941 гг.
Наконец, реализация метода для различных размерностей D системы вида (3) при n = 9, d = 3, l + 1 = 4, N = 300 привела к следующему результату: самой оптимальной в плане
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ точности прогноза стала размерность D = 3, что соответствует теоретическим результатам Такенса о вложениях [9].
Проведенные эксперименты со степенью полиномов n, составляющих оптимизационный сплайн a n (t) и построенных при наличии l + 1=2 измерений на одном отрезке разбиения всего временного промежутка, показали, что с ростом степени n растет точность прогноза численности исследуемой популяции.
5. Исследование метода с помощью искусственной выборки
X, Xb (7g
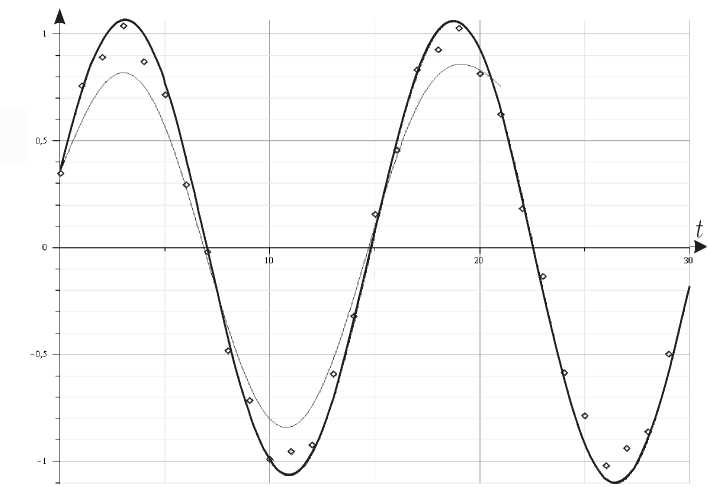
Рис. 4 . График сплайна a 9 (t) изображен тонкой линией, жирной линией изображено решение системы (6) - прогноз для искусственного временного ряда x(t) = sin(0,4 • t) с уровнем шума, не превосходящим 4%
Для исследования зависимости точности прогноза от величины вводимых шумов мы рассмотрели искусственный временной ряд, получаемый из функции x(t) = sin(0,4 • t) путем добавления случайных добавок величины 6 на целочисленной сетке t i = i, i = 0,..., 30, (ромбики на рисунке 4). Аналогично случаю одновидовой системы был построен сплайн на тренировочном промежутке [0, 22], затем система вида (6). Исследование влияния добавленных шумов в данную конструкцию выявило характерное снижение неточности прогноза при уменьшении уровня зашумленности временного ряда. Зависимость погрешности прогноза ε от шумов δ представлена на рис. 5.
6. Применение метода к двухвидовой популяции
Были проведены эксперименты с данными о численности популяций рысей и зайцев [8], представленными в табл. 2. В качестве модели взаимодействия двух популяций мы рассмотрели задачу Коши для системы обыкновенных дифференциальных уравнений вида (2)
Е.В. Лобанова, Н.Б. Медведева
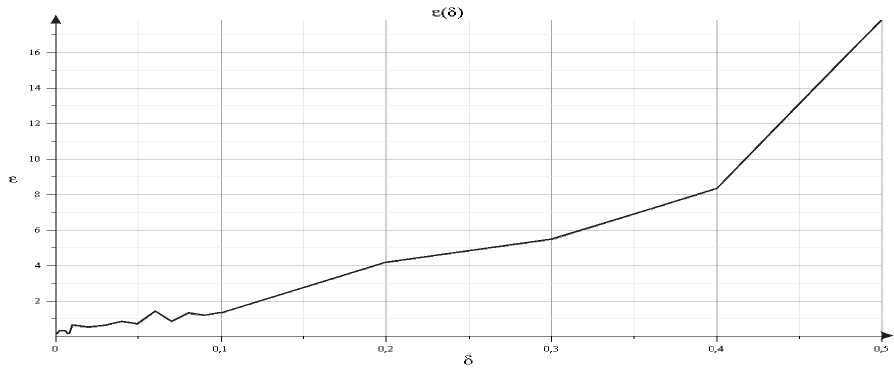
Рис. 5 . Зависимость погрешности прогноза е для искусственной системы x(t) = sin(0,4 • t) от уровня вводимого шума 5
Таблица 2
|
Год |
1950 |
1951 |
1952 |
1953 |
1954 |
1955 |
1956 |
1957 |
1958 |
1959 |
|
Число пар рысей / зайцев |
35/20 |
33/21 |
35/18 |
21/25 |
11/26 |
10/28 |
9/38 |
8/39 |
9/49 |
14/67 |
|
Год |
1960 |
1961 |
1962 |
1963 |
1964 |
1965 |
1966 |
1967 |
1968 |
1969 |
|
Число пар рысей / зайцев |
18/86 |
24/96 |
22/90 |
31/93 |
37/82 |
34/65 |
30/59 |
24/51 |
19/49 |
20/54 |
|
Год |
1970 |
1971 |
1972 |
1973 |
1974 |
1975 |
1976 |
1977 |
1978 |
1979 |
|
Число пар рысей / зайцев |
14/57 |
15/63 |
18/80 |
23/86 |
27/96 |
29/94 |
30/81 |
33/75 |
35/64 |
33/62 |
Показатели численностей популяций рысей и зайцев
размерности D = 2
( X 1 = F 1 (x i ,X 2 ),
( X 2 = F2(xi,X2), где Fi(xi,X2) и F2(xi,x2) — многочлены степени K = 3 от двух переменных:
F j (x 1 , x 2 ) у c j,l 1 ,l‘ 2 x 1 x 2 , j 1 , 2 *
-
l 1 +l 2 ≤ 3
Аналогично одномерному случаю мы взяли для каждой компоненты временного ряда степень полиномов, образующих оптимизационный сплайн, равной n = 9 с уровнем гладкости d = 3, разбиение обучающего временного интервала на равные части по l + 1 = 4 измерения в каждом. Для построения системы (8) тренировочный промежуток был разбит на N = 300 частей. Численно было построено решение системы (8) с начальными условиями С 1 (0) = 20, С 2 (0) = 35. Полученные результаты отражены на рис. 6.
Исследование зависимости погрешности прогноза от степени полиномов K в правой части (8) показало, что возрастание степени правой части K ведет, во-первых, к сильному росту времени счета, делая его иногда невозможным, а во-вторых, вообще говоря, не ведет
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
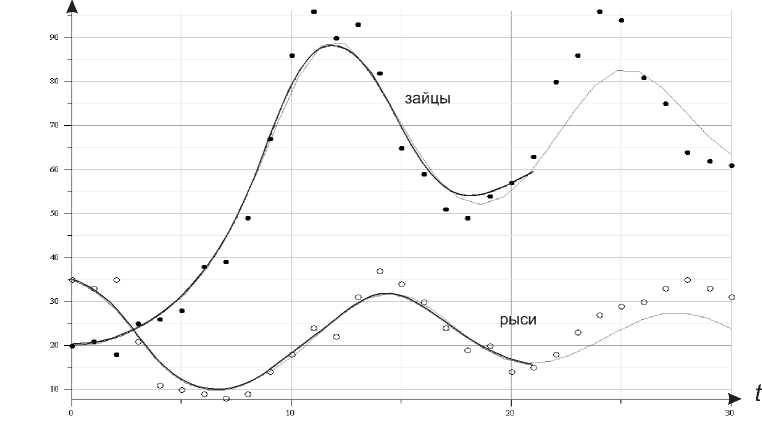
Рис. 6. Прогноз численности популяций рысей и зайцев. Оптимизационные сплайны обозначены толстыми линиями, прогнозы – тонкими линиями к увеличению точности прогноза. В обоих случаях наилучший результат был достигнут при K = 3. Исследование зависимости погрешности прогноза, рассчитанной по формуле (5), от степени оптимизирующего сплайна n и в этом случае показало, что, как правило, чем выше его степень, тем надежнее прогноз.
Работа проводилась при финансовой поддержке РФФИ, грант 13-01-00512.
Список литературы Гладкие модели биологических популяций
- Crutchfield, J.P. Equations of Motion from a Data Series/J.P. Crutchfield, B.S. McNamara//Complex Systems. -1987. -V. 1. -P. 417-452.
- Cremers, J. Construction of Differential Equations from Experimental Data/J. Cremers, A. Hubler//Z. Naturforschung A. -1987. -V. 42. -P. 797-802.
- Gouesbet, G. Construction of Phenomenological Models from Numeri-Cal Scalar Time Series/G. Gouesbet, J. Maquet//Physica D. -1992. -V. 58. -P. 202-215.
- Gouesbet, G. Global Vector-Field Approximation by Using a Multi-Variate Polynomial Approximation on Nets/G. Gouesbet, C. Letellier//Phys.Rev. E. -1994. -V. 49. -P. 4955-4972.
- Восстановление структуры динамической системы по временным рядам/Д.А. Грибков, В.В. Грибкова, Ю.А. Кравцов, Ю.И. Кузнецов и др.//Радиотехника и электроника. -1994. -Т. 39, вып. 2. -С. 269-277.
- Янсон, Н.Б. Моделирование динамических систем по экспериментальным данным/Н.Б. Янсон, В.С. Анищенко//Изв. ВУЗов. Прикладная нелинейная динамика. -1995. -Т. 3, № 3. -С. 112-121.
- Безручко, Б.П. Реконструкция обыкновенных дифференциальных уравнений по временным рядам/Б.П. Безручко, Д.А. Смирнов. -Саратов: ГосУНЦ Колледж, 2000. -40 с.
- Уильямсон, M. Анализ биологических популяций/М. Уильямсон. -Москва: Мир, 1975.
- Takens, F. Detecting Strange Attractors in Turbulence, in Dynamical Systems and Turbulence, Warwick. eds. D.Rang and L.S.Young/F. Takens//Lecture Notes in Mathematics. -1980. -V. 898. -P. 366-381.
