Имитационная модель рабочего процесса манипулятора при удалении нежелательной растительности вместе с корневой системой в лесных насаждениях

Автор: Попиков Птр Иванович, Бухтояров Леонид Дмитриевич, Платонов Алексей Александрович, Вакула Елена Юрьевна
Журнал: Resources and Technology @rt-petrsu
Статья в выпуске: 4 т.17, 2020 года.
Бесплатный доступ
Одной из актуальных проблем, возникающих при выращивании долговременных лесных культур, является проблема своевременного и качественного выполнения их осветлений. Срезание или вырубание нежелательной древесно-кустарниковой поросли ручным или механизированным способом зачастую приводит к продолжению существования удаляемой растительности. Одним из способов уничтожения нежелательной растительности, обеспечивающим невозобновление её произрастания на очищаемой территории, является способ удаления нежелательной поросли вместе с корневой системой, осуществляемый, например, путём воздействия на неё рабочего органа, закреплённого на конце стрелы манипулятора многофункциональной машины. С учётом ранее полученных авторами статьи результатов по моделированию сферического рабочего пространства машин с манипуляторными установками авторы в данной статье, с целью определения оптимальных значений конструктивных и технологических параметров манипулятора с размещённым на его конце рабочим органом, разработали математическую модель процесса воздействия указанных технических средств на нежелательную поросль, обеспечивающую высокие характеристики производительности и качества работы как самого манипулятора, так и рабочего органа. Выполненное в данном исследовании моделирование было основано в целом на методах классической механики. Для обоснования кинематических параметров манипулятора и рабочего органа авторами разработан ряд расчётных схем с указанием положений выдернутой поросли в нескольких системах координат, в том числе координат характерных точек нежелательной поросли с обоснованием особенностей их принятия, указаны точки приложения внешних сил (движущих моментов и моментов сопротивления движению, сил тяжести элементов манипулятора), действующих на манипулятор и рабочий орган. Авторами составлен ряд дифференциальных уравнений движения элементов манипулятора (платформы, поворотной стойки, корпуса и штока), зависящих от времени, приведён график рабочего процесса манипулятора с указанием начальных параметров и номинальных значений перемещений. На основании разработанной математической модели для ряда начальных условий рассчитаны траектории и построены графики движения характерных точек манипулятора и поросли, показаны направления дальнейшего применения найденных управляющих воздействий
Нежелательная поросль, удаление, манипулятор, моделирование, дифференцирование, траектория движения
Короткий адрес: https://sciup.org/147227132
IDR: 147227132 | УДК: 630*307 | DOI: 10.15393/j2.art.2020.5402
Simulation model of the manipulator workflow when removing uncontrolled vegetation along with the root system in forest plantations
One of the urgent problems that arises when growing long-term forest stands is the problem of timely and high-quality sapling thinning. Manual or mechanized cutting or clearing of uncontrolled trees and shrubs often results in their survival. One of the methods for destruction of such vegetation that protects the cleared areas from its regeneration is a method for removing uncontrolled underwood including the root system that is performed by using a working body attached to the end of the manipulator arm of a multifunctional machine. The authors take into account the results previously obtained when modeling the spherical working space of machines with manipulator installations. To determine the optimal values of the design and technological parameters of the manipulator with a working body located at its end the authors have developed a mathematical model describing the process of these technical means influence on the uncontrolled underwood, providing high performance and quality characteristics of both the manipulator itself and the working body. This modeling was based in general on the methods of classical mechanics. To substantiate the kinematic parameters of the manipulator and the working body the authors have developed a number of design schemes indicating the positions of the pulled out underwood in several coordinate systems. These coordinates included the characteristic points of the uncontrolled underwood with substantiation of the features of their adoption, points of application of external forces (driving moments and moments of resistance movement, gravity of the manipulator elements) acting on the manipulator and the working body. The authors have compiled a number of time-dependent differential equations of the movement of the manipulator elements (platform, rotary rack, body and rod); the graph of the manipulator workflow indicates the initial parameters and nominal displacement values. Based on the developed mathematical model for a number of initial conditions, the authors have calculated the trajectories, constructed the graphs of the movement of the characteristic points of the manipulator and the underwood, and proposed the directions of further application of the obtained control actions.
Текст научной статьи Имитационная модель рабочего процесса манипулятора при удалении нежелательной растительности вместе с корневой системой в лесных насаждениях
Одним из приёмов выращивания полноценных и долговременных лесных культур [1], [2] является осветление, в процессе которого регулируют густоту и улучшают условия роста деревьев главной породы. Осветление проводят в насаждениях, начиная с 3…5 и до 10 лет, а при зарастании междурядий порослью второстепенных лиственных пород необходимость осветления культур появляется уже на втором году после посадки. Особенно это характерно для зоны смешанных лесов, где обилие тепла, плодородные почвы и достаточное количество осадков приводят к массовому появлению поросли осины и берёзы. Поэтому, если своевременно не проводить осветление, то, как отмечают многие учёные [3], [4], лесные культуры гибнут.
Для срезания поросли могут применяться кусторезы ручные и тракторные с пассивными и активными рабочими органами [5]. В частности, определённое применение находят кусторезы с рабочими органами активного действия [6—8] фрезерного типа, к которым относятся тракторные кусторезы КОГ-2.3, КОМ-2.3, КОН-2.3, КО-1.5 и др. Однако после срезания этими (а также иными) кусторезами поросль продолжает развиваться, что снижает сроки очередного проведения осветления. Поскольку поросль разнообразна по своим параметрам (диаметр, высота) и физико-механическим свойствам (сопротивление изгибу, жёсткость стволика), то доля уничтожаемой поросли составляет всего лишь 30…40 %. В соответствии с этим нам представляется актуальным проведение дополнительных исследований, направленных на устранение имеющихся недостатков в существующих способах и средствах удаления нежелательной растительности.
2. Материалы и методы
Одним из способов уничтожения нежелательной растительности, обеспечивающим невозобновление её произрастания на очищаемой территории, является способ удаления нежелательной поросли вместе с корневой системой [9] и переработкой в щепу каждого удаляемого экземпляра древесно-кустарниковой растительности. Подобные воздействия на нежелательную поросль способствуют уменьшению ручного труда работников лесных предприятий, сокращению затрат на вывоз и последующую утилизацию порубочных остатков, уменьшению (вплоть до полного исключения) необходимости повторной обработки ранее очищенных площадей и, в целом, повышению качества осветления лесных культур.
В соответствии с указанным способом воздействие на нежелательную поросль осуществляется рабочим органом, закреплённым, например, на конце стрелы манипулятора (рисунок 1) многофункционального транспортного средства. Рассматриваемый в данной работе манипулятор представляет собой платформу 1 с поворотными стойкой 2 и корпусом 3, внутри него возвратно-поступательно перемещается шток 4. На конце штока установлено рабочее оборудование 5 (в данном случае — клещевой захват).
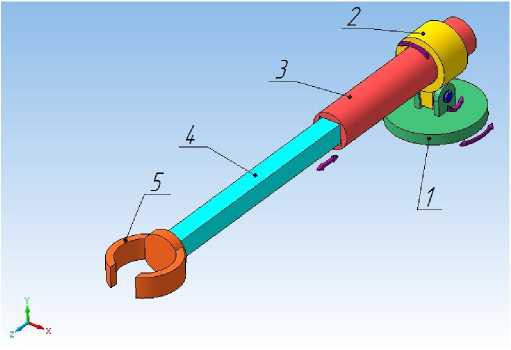
Рисунок 1. Малозвенный манипулятор с рабочим оборудованием
Figure 1. Manipulator with a small number of links and working equipment
Отметим, что на современном этапе развития науки и техники одним из основных этапов разработки наукоёмкой продукции является моделирование сложных систем или процессов [10], [11], поскольку современная технология является чрезвычайно сложным техническим объектом. В целом вопросами моделирования работы машин с манипуляторными установками занимался целый ряд как отечественных (например, [12—15]), так и зарубежных [16—18] учёных, однако нами было выявлено недостаточное изучение вопроса моделирования рабочего процесса малозвенного манипулятора с закреплённым на конце его стрелы рабочим органом. С учётом полученных нами результатов по моделированию сферического рабочего пространства машин с манипуляторными установками [19] для определения оптимальных значений конструктивных и технологических параметров рассматриваемого в данной работе манипулятора с размещённым на его конце рабочим органом необходимо разработать математическую модель процесса воздействия указанных технических средств на нежелательную поросль, обеспечивающего высокие характеристики производительности и качества работы как самого манипулятора, так и рабочего органа [20], [21]. Выполненное в данном исследовании моделирование было основано, в целом, на методах классической механики [22—24].
3. Результаты
Для обоснования кинематических и динамических параметров манипулятора нами была разработана математическая модель рабочего процесса удаления нежелательной поросли с его корневой системой. На рисунке 2 приведена расчётная схема манипулятора для определения его кинематических параметров.
Характерными точками на данной схеме являются точки A и B — точки, связанные с удаляемой нежелательной порослью, при этом в качестве точки A нами был принят верх основного ствола нежелательной растительности, а в качестве точки B — начало её корневой системы.
Рассматриваем координаты крайних точек A и B выдернутой с корнем поросли в системе координат при повороте растительности на угол (рисунок 3).
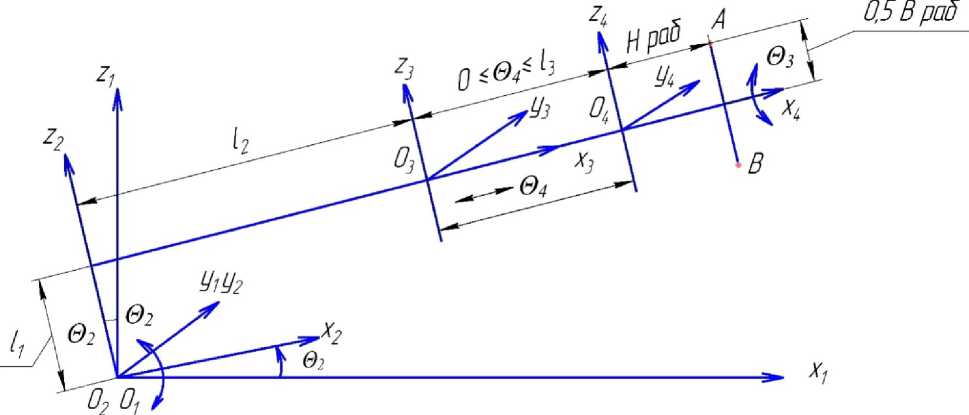
Рисунок 2. Расчётная схема манипулятора для определения кинематических параметров
-
Figure 2. Design diagram of the manipulator for determining the kinematic parameters
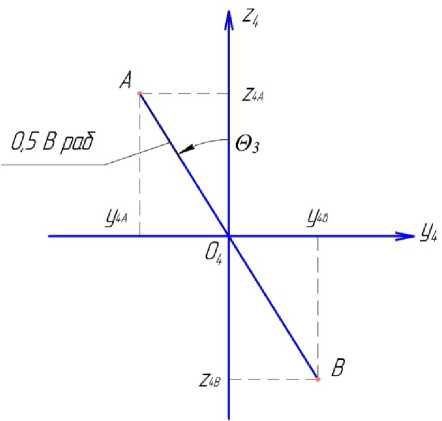
Рисунок 3. Положение выдернутой поросли в системе координат ZOY
-
Figure 3. The position of the pulled out underwood in the ZOY coordinate system
При этом положительное направление вращения © 3 принимаем против часовой стрелки со стороны положительного направления оси x 4 ( го д > 0):
|
X 4A = H раб = Н |
X b = Н |
|
|
< Y 4 a = - 0,5 • B • sin © 3 |
Y 4 В = 0,5 • B • sin © 3 |
(1) |
|
_ Z 4 A = 0,5 • B • cos © 3 |
Z 4 В =- 0,5 • B • cos © 3 |
При переносе начала координат из точки О 4 в точку О 2 :
|
' X 2A = H + 1 2 +© 4 Y 2 A =- 0,5 • B • sin © 3 _ Z 2 A = 0,5 • B • cos © 3 + 1 1 |
Х2В = H + 1 2 +© 4 Y 2 в = 0,5 • B • sin © 3 (2) Z 2 В =- 0,5 • B • cos © 3 + 1 1 |
Рассматриваем координаты точек А и В выдернутой поросли относительно осей координат x 1 y 1 z 1 (рисунок 4). Очевидно, координаты относительно оси y 1 не изменятся. Рассмотрим координаты относительно осей x 1 О 1 z 1 :
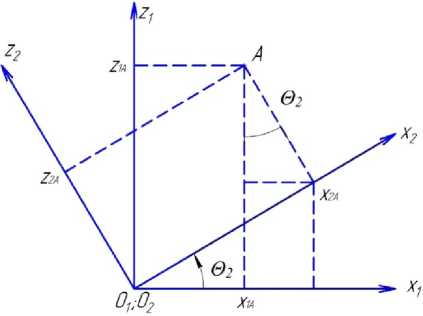
Рисунок 4. Координаты точек А и В выдернутой поросли относительно осей координат x 1 y 1 z 1
Figure 4. Coordinates of points A and B of the pulled out underwood relative to the coordinate axes x 1 y 1 z 1
Х 1А = Х 2А • cos © 2 - Z 2 A • sin © 2
Z ia = Х 2А • sin © 2 + Z 2 A • cos © 2
Таким образом, имеем:
X 1A = ( H + 1 2 + © 4 ) • cos © 2 — ( 0,5 • cos © 3 + 1 1 ) • sin © 2
< Y1 A =- 0,5 • sin © 3 (4)
_ Z 1 A = ( H + 1 2 +© 4 ) • sin © 2 + ( 0,5 • cos © 3 + 1 1 ) • cos © 2
XiB = ( H + 1 2 +0 4 ) • cos 0 2 - ( 1 1 - 0,5 • cos © 3 ) • sin © 2
< У 1 в =- 0,5 • sin © 3 (5)
_ Z 1 B = ( H + 1 2 + 0 4 ) • sin 0 2 + ( 1 1 - 0,5 • cos © з ) • cos 0 2
Рассматриваем поворот системы координат % i y i z i относительно оси z i на угол 0 i . Определяем координаты точек А и В выдернутой поросли в системе координат x y z (рисунок 5). Очевидно, координаты z не изменятся. Рассмотрим координаты относительно осей х и у .
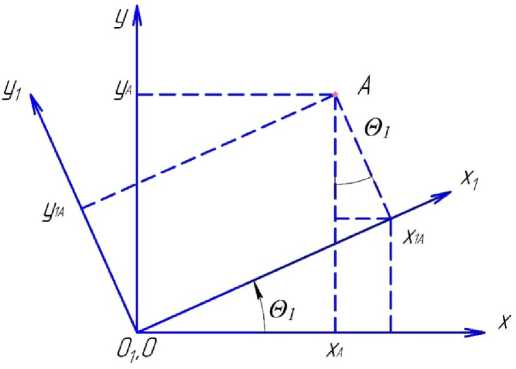
Рисунок 5. Координаты точек А и В выдернутой поросли в системе координат x y z
Figure 5. The coordinates of points A and B of the pulled out underwood in the coordinate system x y z
X а = X ia • cos 0 i - Y i a • sin 0 i
Z a = X ia • sin 0 i + Y i A • cos 0 i
Аналогичные выражения можно получить и для точки B выдернутой поросли. Окончательно имеем:
X a = [( H + 1 2 +0 4 ) • cos 0 2 - ( l i + 0,5 • cos 0 3 ) • sin 0 2 ] • cos 0 i +
+ 0,5 • B • sin 0 3 • sin 0 i
< Y a = [( H + 1 2 +0 4 ) • cos 0 2 - ( 1 i + 0,5 • cos 0 3 ) • sin 0 2 ] • sin 0 i -
-
- 0,5 • B • sin 0 3 • cos 0 i
Z a = ( H + 1 2 +0 4 ) • cos 0 2 - ( 1 i + 0,5 • cos 0 3 ) • cos 0 2
X b = [( H + 1 2 + © 4 ) ' cos © 2 - ( 1 1 — 0,5 ' cos © 3 ) ' sin © 2 ] ' cos © 1 —
-
- 0,5 • B • sin © з • sin © 1
* Y g = [( H + l 2 + © 4 ) • cos © 2 — ( 1 1 — 0,5 • cos © з ) • sin © 2 ] • sin © 1 + (8)
+ 0,5 • B • sin © 3 • cos © 1
_ Z B = ( H + l 2 +© 4 ) • sin © 2 + ( l 1 — 0,5 • cos © 3 ) • cos © 2
На основании математической модели, описывающей движение характерных точек манипулятора и поросли, рассчитаем траектории их движения для следующих условий: скорости звеньев «1 = 0,628 c-1, «2 0,105 c-1, «3 = 0, V4= 0,1 м/с (рисунки 6 и 7). Время моделирования t = 5 c. Высота поворотной колонны 2 м, длина стрелы 2 м, длина рукояти 1,1 м, высота поросли 1 м.
Таблица. Исходные значения координат точек для расчёта
Table. The initial values of the coordinate points to calculate
|
№ п/п |
Обозначение точек |
Координаты точек |
||
|
X, мм |
Y, мм |
Z, мм |
||
|
1 |
О 1 |
0 |
0 |
0 |
|
2 |
О 2 |
0 |
0 |
1850 |
|
3 |
О 3 |
1624 |
0 |
969 |
|
4 |
О 4 |
2085 |
0 |
719 |
|
5 |
А |
2213 |
0 |
1006 |
|
6 |
В |
2152 |
0 |
3 |
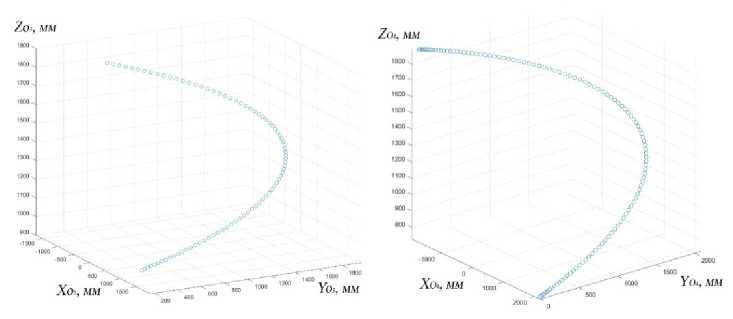
Рисунок 6. Траектории движения точек О 3 , О 4 манипулятора
Figure 6. Trajectories of movement of manipulator points O 3 , O 4
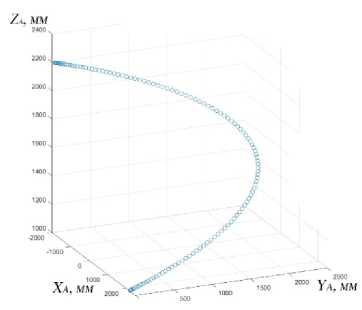
Рисунок 7. Траектории движения точек А и В поросли
XU, ММ '™ зк»
Figure 7. Trajectories of movement of underwood points A and B
4. Обсуждение и заключение
-
1. На основании полученной имитационной модели манипулятора были установлены траектории движения характерных точек звеньев манипулятора и крайних точек выдернутой поросли.
-
2. Найденные управляющие воздействия могут быть использованы как входные параметры для моделирования манипулятора в других средах и для создания устройства, автоматизирующего работу оператора манипулятора.
Список литературы Имитационная модель рабочего процесса манипулятора при удалении нежелательной растительности вместе с корневой системой в лесных насаждениях
- Бартенев И. М., Шаталов В. Г. Технология и механизация выращивания защитных лесных насаждений: Учеб. пособие. Воронеж: ВПИ, 1991. 66 с.
- Мельчанов В. А., Фремон Т. В., Эрреро Х. Защитная роль лесных насаждений по берегам рек и водохранилищ: [Монография]. М.: РИАМА, 2008. 170 с.
- Лесные культуры: Учебник / А. Р. Родин, С. А. Родин, Е. А. Калашникова, С. Б. Васильев; Под ред. В. Ф. Никитина. М.: МГТУ им. Н. Э. Баумана, 2020. 210 с.
- Редько Г. И. , Мерзленко М. Д., Бабич Н. А. Лесные культуры: в 2 ч.: Учебник / отв. ред. Г. И. Редько. М.: Изд-во Юрайт, 2019. Ч. 1. 197 с.
- Бартенев И. М., Драпалюк М. В., Попиков П. И., Бухтояров Л. Д. Конструкции и параметры машин для расчистки лесных площадей: [Монография]. М.: Флинта-Наука, 2007. 208 с.
- Бухтояров Л. Д. Разработка конструкции и обоснование параметров инерционно-рубящего рабочего органа кустореза для удаления лесной поросли: Дис. ... канд. техн. наук: 05.21.01. Воронеж, 2004. 189 с.
- Малюков С. В. Проведение испытаний кустореза с упорами-улавливателями порослевин в полевых условиях // Лесотехнический журнал. 2011. № 4. С. 93—97.
- Булавинцева А. Д. Обоснование параметров активного навесного кустореза для линейных объектов: Автореф. дис. ... канд. техн. наук: 05.21.01. Йошкар-Ола, 2013. 18 с.
- Патент на изобретение RU 2642180 C1, 24.01.2018. Способ удаления нежелательной растительности с полосы отвода железных дорог / Платонов А. А., Зимарин С. В., Вакула Е. Ю. Заявка № 2016148090 от 07.12.2016.
- Попиков П. И. Повышение эффективности гидрофицированных машин при лесовос-становлении на вырубках. Воронеж, 2001. 156 с.
- ДрапалюкМ. В., Полев В. С. Моделирование рубящих элементов цепного кустореза // Лесной журнал. 2010. № 6. С. 94—98.
- Гидроманипуляторы и лесное технологическое оборудование: [Монография] / И. М. Бартенев, З. К. Емтыль, А. П. Татаренко, М. В. Драпалюк, П. И. Попиков, Л. Д. Бухтояров. М.: Флинта-Наука, 2011. 408 с.
- Иванов А. В. Манипулятор как многопараметрический объект управления // Известия Санкт-Петербургской лесотехнической академии. 2007. № 181. С. 116—120.
- Chizhikov V. I., Kurnasov E. V., Petrov A. B. Robot manipulator control with efforts stabilization in capture of object with fuzzy geometrical characteristic // Proceedings of the 5th International Conference on Industrial Engineering (ICIE 2019). «Lecture Notes in Mechanical Engineering». 2019. P. 823—837. DOI: 10.1007/978-3-030-22063-1_88.
- Fedorushkov A. B., KuzmenkoD. N., LazarevE. A. Selection of concept and determination of the main parameters for manipulator of dual-arm manipulator system of planetary rover // ARPN Journal of Engineering and Applied Sciences. 2015. Vol. 10, no. 20. P. 9706—9712.
- Theodoridis D. C., Boutalis Y. S., Christodoulou M. A. A New adaptive neuro-fuzzy controller for trajectory tracking of robot manipulators // International Journal of Robotics and Automation. 2011. Vol. 26, no. 1. P. 64—75. DOI: 10.2316/Journal.206.2011.1.206-3401.
- Yuan P., Su F., Shi Z. Y., Wang T. M., Chen D. D. Autonomous path planning solution for industrial robot manipulator using backpropagation algorithm // Advances in Mechanical Engineering. 2015. Vol. 7, no. 12. P. 15619768. DOI: 10.1177/1687814015619768.
- Zhang Y., Li W., Liao B., Guo D., Peng C. Analysis and verification of repetitive motion planning and feedback control for omnidirectional mobile manipulator robotic systems // Journal of Intelligent and Robotic Systems. 2014. Vol. 75, no. 3-4. P. 393—411. DOI: 10.1007/s10846-014-0022-0.
- Платонов А. А. Элементы математической модели образования сферического рабочего пространства манипуляторными машинами // Научно-технический вестник Брянского государственного университета. 2018. № 1. С. 48—55. DOI: 10.22281/2413-9920-2018-0401-48-55.
- Грязин В. А. Интерактивный подход в моделировании манипуляторов транспортно-технологических машин // Известия Санкт-Петербургской лесотехнической академии. 2013. № 205. С. 109—117.
- Лазуткина Н. А. Техническая реализация управления переносным движением манипулятора // Фундаментальные исследования. 2015. № 9-3. С. 476—480.
- Адлер Ю. П., Маркова Е. В., Грановский Ю. В. Планирование эксперимента при поиске оптимальных решений: Учеб. пособие. М.: Наука, 1976. 279 с.
- Моделирование сельскохозяйственных агрегатов и их систем управления: Учебник для вузов / Под ред. А. Б. Лурье. Л.: Колос. Ленингр. отд-ние, 1979. 312 с.
- Советов Б. Я., Яковлев С. А. Моделирование систем: Учеб. пособие. М.: Высш. шк., 1998. 319 с.
