Имитационное моделирование движения быстроходной гусеничной машины с независимым гидрообъёмным механизмом поворота

Автор: Кондаков Сергей Владимирович, Филичкин Николай Васильевич, Вансович Егор Иванович
Рубрика: Расчет и конструирование
Статья в выпуске: 10 (186), 2010 года.
Бесплатный доступ
Приведены результаты имитационного моделирования движения машины с независимым гидрообъемным механизмом поворота в сравнении с традиционным дифференциальным при одинаковых параметрах траектории и скорости. Проиллюстрировано преимущество предлагаемого механизма поворота по установочной мощности гидрообъемного привода.
Быстроходная гусеничная машина, математическая модель, гидрообъемная передача, механизм поворота, установочная мощность
Короткий адрес: https://sciup.org/147151488
IDR: 147151488 | УДК: 629.114.2
Imitation model of mobility of high-speed caterpillar machine with independent hydrostatic turning drive
The author considers the results of researching of mobility of high-speed caterpillar machine with independent hydrostatic drive in comparison with traditional differential drive and equal parameters of trajectory and speed. The article describes advantages of suggested turning mechanism in adjusting capacity of hydrostatic drive.
Текст научной статьи Имитационное моделирование движения быстроходной гусеничной машины с независимым гидрообъёмным механизмом поворота
Известна кинематическая схема дифференциального механизма поворота (МП), примененная на основных современных боевых танках и машинах пехоты «Абрамс», «Леопард-2», «Челленджер», БМП «Мардер», БМП-3 [1,2].
Несмотря на очевидные преимущества этих механизмов поворота им присущи и недостатки, главным из которых являются высокие требования к установочной мощности гидрообъёмной передачи (ГОП) [3], невозможность маневрирования на тяжелых грунтах с малыми радиусами, снижение управляемости при резком изменении кривизны траектории движения на высоких скоростях и больших радиусах. В традиционной дифференциальной схеме вся мощность, затрачиваемая на поворот, проходит через ГОП. Считается доказанным, что установочная мощность ГОП должна равняться мощности двигателя [4].
Для устранения указанных недостатков в машинах применены различные технические решения, направленные на помощь ГОП другими механизмами, например гидромуфта механизма поворота в «Леопарде-2» и БМП «Мардер», блокировочный фрикцион ГОП в опытных отечественных машинах.
Авторами предложено изменить кинематическую схему механизма поворота таким образом, чтобы при входе в поворот несколько снижалась скорость машины, что благотворно сказывается на тяговом балансе [5] и на управляемости быстроходной гусеничной машины (БГМ) [6], а также уменьшить долю мощности, затрачиваемой на поворот, проходящей через ГОП.
Имитационная модель, опубликованная в работах [7-9], позволила провести исследование поведения БГМ в условиях наиболее тяжелых для механизма поворота. Таковым является поворот вокруг отстающей гусеницы, когда от ГОП требуется наибольшая скорость вращения мотора и наибольшее давление одновременно. Именно этот режим поворота формулирует требования к установочной мощности ГОП [10].
Для сравнения взяты две машины - БМП-3 (рис. 1) и се двойник с независимым механизмом поворота (рис. 2), у которого забегающий борт в повороте не ускоряется, что снижает скорость геометрического центра машины и, уменьшает мощность ГОП, требуемую для поворота. Движение обеих машин в повороте осуществляется с одинаковыми параметрами: радиус 3,2 м, скорость 3,2 м/с, что соответствует первой передаче БМП-3 и движению вокруг отстающей гусеницы. Коэффициент сопротивления повороту д = 0,7, коэффициент сцепления гусеницы с грунтом ф = 0,7.
Целевая функция исследования: чем меньше мощность, проходящая через ГОП при повороте вокруг остановленной гусеницы при одной и той же скорости, тем совершеннее механизм поворота.
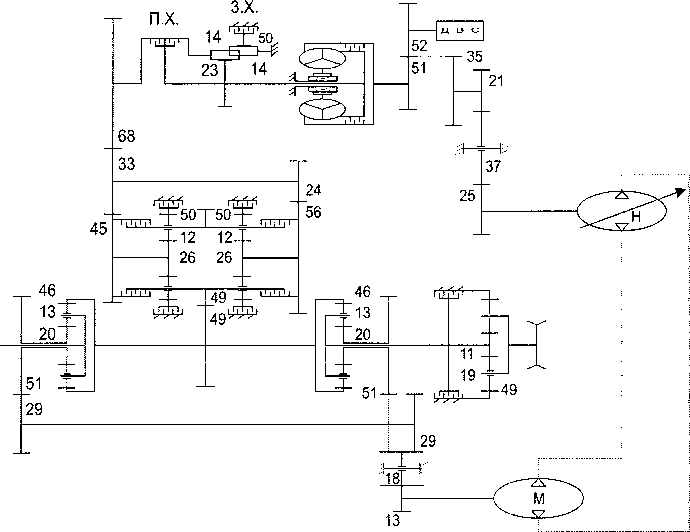
Рис. 1. Кинематическая схема БМП-3
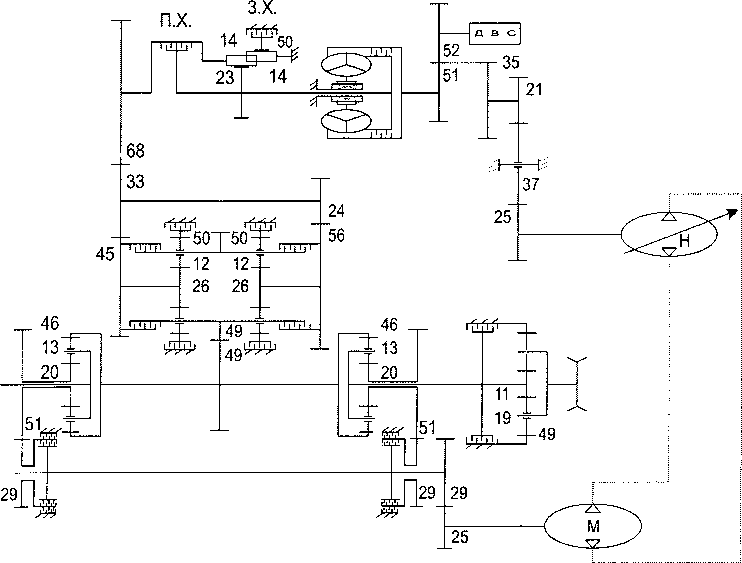
Рис. 2. Кинематическая схема машины с независимым гидрообъемным механизмом поворота
Для достижения одинаковых условий поворота пришлось в независимой схеме включить вторую передачу с передаточным числом 2,2 и изменить согласующий редуктор между солнечной шестерней суммирующего планетарного механизма отстающего борта и мотором ГОП, назначив ему передаточное число 2,1 вместо прежних 3,92.
Четыре результирующих графика изображены на рис. 3, 4.
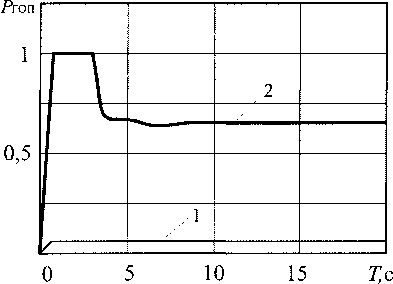
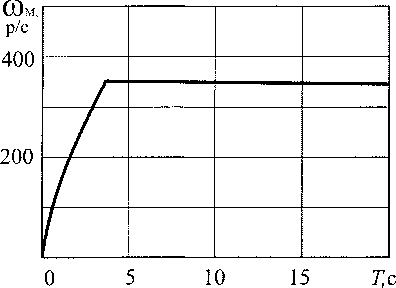
Рис. 3. Давление и скорость мотора ГОП для дифференциального механизма поворота
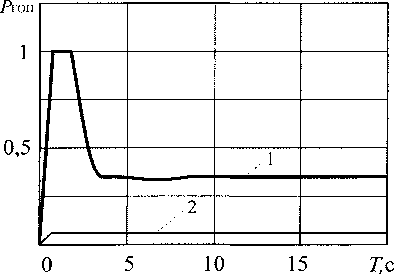
Рис. 4. Давление и скорость мотора ГОП для независимого механизма поворота
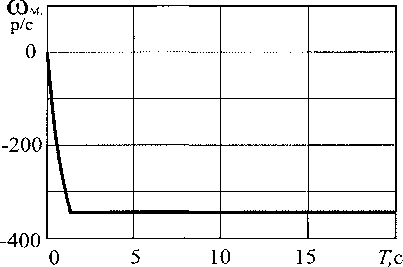
Подача ГОП одинакова и максимальна в обоих расчетах, скорости моторов ГОП максимальны и равны 340 рад/с. Разница в давлениях как в переходный период, так и в установившемся повороте: 0,35 от максимума у БГМ с независимым МП и 0,7 - у БМП-3. Это полностью согласуется с результатами статических оценок, проведенных ранее [И, 12]. Мощность, проходящая через ГОП, у БГМ с бортовым МП в 2 раза меньше, чем у БМП-3.
Главный интерес имитационного моделирования состоит в оценке переходного процесса. Из рис. 3, 4 видно, что перегрузка ГОП по давлению для независимого МП в 2 раза меньше по времени, а время переходного процесса сократилось с 3,2 с у БМП-3 до 1,8 с у независимого МП. Уместно напомнить, что для БГМ 1 с времени в данных расчетах - это 3,2 м пройденного пути, а при максимальной скорости - 20 м.
Таким образом, показано, что математическая модель не противоречит статическим оценкам и может быть использована для оценки динамических процессов в новом бортовом гидрообъем-ном механизме поворота, перспективном с точки зрения снижения требований по установочной мощности ГОП.
Большой интерес представляет движение по тяжелым грунтам. Для различных pmaX проведено несколько вариантов расчета, в которых pm^ = 0,7; 0,9; 1 соответственно. Результаты сведены в табл. 1.
Сравнительный анализ приведенных в таблице результатов свидетельствует о том, что на тяжелых грунтах БМП-3 не может поворачивать, в ГОП срабатывают предохранительные клапана, мотор ГОП не развивает нужных оборотов, нарушается заданная штурвалом траектория. В отличие от БМП-3 БГМ с независимым МП устойчиво проходит заданный маршрут, полностью подчиняясь водителю.
Таблица 1
Параметры установившегося движения БМП-3 и БГМ с независимым гидрообъемным механизмом поворота при ртах = 0,7; 0,9; 1
|
Относительное давление ГОП |
Скорость мотора, рад/с |
Радиус, м |
Скорость центра тяжести, м/с |
|
|
БМП-3 |
0,7; 0,92; 1 |
340;310; 250 |
3,21; 3,58; 4,8 |
3,2; 3,18; 3,18 |
|
БГМ с независимым МП |
0,35; 0,55; 0,65 |
340;330; 330 |
3,21; 3,58; 3,71 |
3,2; 3,15; 3,14 |
Так как часто односторонний анализ движения при малых скоростях противоречит кинематике или силовым параметрам движения при больших скоростях, то дополнительно оценено движение на большой скорости (табл. 2).
Таблица 2
Параметры установившегося движения БМП-3 и БГМ с независимым гидрообъемным механизмом поворота при ртах = 0,7 при скорости 17 м/с
|
Относительное давление ГОП |
Скорость мотора, рад/с |
Радиус, м |
Пиковое давление ГОП |
|
|
БМП-3 |
0,23 |
100 |
77 |
0,5 |
|
БГМ с независимым МП |
0,13 |
-106 |
75 |
0,35 |
Выводы
-
1. Предложенный авторами независимый гидрообъемный механизм поворота позволяет БГМ поворачивать в сложных грунтовых условиях, где с задачей не справляется дифференциальный МП БМП-3.
-
2. В равных условиях поворота с радиусом 3,2 м близким к повороту вокруг отстающей гусеницы с одинаковой скоростью (3,2 м/с) центра машины независимому МП требуется вдвое меньшая мощность, чем традиционному дифференциальному МП БМП-3.
-
3. В равных условиях поворота на большой скорости 17 м/с и радиусом 75 м выявлена аналогичная тенденция: требуется вдвое меньшая мощность ГОП (относительное давление ГОП у независимого МП 0,13 и 0,23 у дифференциального).
-
4. Имитационное моделирование позволило выявить преимущество независимого МП и по качеству переходного процесса - время работы «на клапане» при входе в поворот уменьшилось на 40 % с 3,2 до 1,8 с.
-
5. При большой скорости уменьшился пик давления при входе в поворот: с 0,5 у дифференциального МП до 0,35 у независимого МП.
Список литературы Имитационное моделирование движения быстроходной гусеничной машины с независимым гидрообъёмным механизмом поворота
- Военные гусеничные машины: учебник. В 4 т. Т. 1: Устройство. Кн. 2/под ред. B.C. Старовойтова. -М.: Изд-во МГТУ им. Н.Э. Баумана, 1990. -336 с.
- Исаков П.П. Теория и конструкция танка. Т. 5: Трансмиссии/П.П. Исаков. -Л.: Машиностроение, 1985.-367 с.
- Благонравов А.А. Динамика управляемого движения гусеничной машины: учебное пособие/А.А. Благонравов, В.Б. Держанский. -Курган: Изд-во Курганского машиностроит. ин-та, 1995. -162 с.
- Филичкин Н.В. Гидромеханическая трансмиссия гусеничной машины с гидрообъемной передачей пониженной мощности в механизме поворота/Н.В. Филичкин//Вестник ЮУрГУ. Серия «Машиностроение». -2003. -Вып. 3.-№ 1 (17). -С. 94-104.
- Филичкин Н.В. Трансмиссия быстроходной гусеничной машины с центральной коробкой передач и бесступенчатым механизмом поворота/Н.В. Филичкин//Вестник ЮУрГУ. Серия «Машиностроение». -2006. -Вып. 8. -№ 11 (66). -С. 130-139.
- Держанский В.Б. Исследование динамики управляемого движения быстроходных гусеничных машин/В.Б. Держанский, И.А. Тараторкин, К.С. Жебелев//Вестник ЮУрГУ. Серия «Машиностроение». -2006. -Вып. 8. -№ 11 (66). -С. 114-121.
- Кондаков С.В. Повышение подвижности быстроходной гусеничной машины путем автоматизации системы управления криволинейным двиэюением: дис.... д-ра техн. наук/С.В. Кондаков. -М.: МГТУ им. Н.Э. Баумана. -2009. -302 с.
- Кондаков С.В. Повышение подвижности быстроходной гусеничной машины путем автоматизации механизма поворота/С.В. Кондаков//Вестник ЮУрГУ. Серия «Машиностроение». -2009. -Вып. 14. -№ 33 (166). -С. 38-44.
- Кондаков С.В. Повышение подвижности быстроходной гусеничной машины путем автоматизации системы управления криволинейным двиэюением: монография/С.В. Кондаков -Челябинск: Издво ЮУрГУ, 2009. -110 с.
- Васильченков В.Ф. Военные гусеничные машины: учебник. В 2 ч. Ч. 1: Трансмиссия и приводы управления. -Рыбинск: Изд-во ОАО «РДП»; Рязань: ВАИ, 1998. -560 с.
