Информационные технологии в электромехатронике

Автор: Смирнов Юрий Сергеевич, Юрасова Екатерина Валерьевна, Никитин Иван Сергеевич
Статья в выпуске: 1 т.15, 2015 года.
Бесплатный доступ
Рассмотрены информационные технологии управления (ИТУ) электромехатронных преобразователей (ЭМТП). В их электромеханической компоненте (ЭМК) агрегатированы в качестве преобразователя энергии бесконтактная электрическая машина с постоянными магнитами (БЭПМ), а в качестве первичного измерительного преобразователя (ПИП) единого информационного обеспечения (ЕИО) процесса управления функциональным движением рабочего механизма (РМ) - синусно-косинусный сенсор (СКС). Его выходные сигналы конвертируются вторичным преобразователем микроэлектронной компоненты (МЭК) в цифровые эквиваленты перемещения, формируя массив данных, обработка которых на основе когнитивных технологий (КТ) позволяет реализовать в ЭМТП адаптацию к внешним и внутренним возмущениям, самокоммутацию БЭПМ с угловым опережением или отставанием, оптимизацию перемещения во времени и самоорганизацию при конвертации вида энергии и форм информации, что обеспечивает получение синергетического эффекта.
Информационные технологии управления, электромехатронные преобразователи, бесконтактные электромашины с постоянными магнитами, единое информационное обеспечение, рабочий механизм, синусно-косинусные сенсоры, электромеханическая и микроэлектронная компоненты, когнитивные технологии, адаптация, самокоммутация, оптимизация, самоорганизация и синергетический эффект
Короткий адрес: https://sciup.org/147155018
IDR: 147155018 | УДК: 621.856.8
Information technologies in electromehatronics
The information technology of the electromechatronic converters management are considered. Сontactless electric machine with the permanent magnets is aggregated as an energy converter in its electromechanical components and sine-cosine sensor is a primary measuring converter of common information providing of functional movement process control of the working mechanism. Sensor output signals are converted by the secondary converter microelectronic components in the digital equivalents of movement, forming an array of data. Data processing based on cognitive technology allows to realize adaptation of the electromehatronics converters to internal and external perturbations, self-commutation of contactless electric machine with permanent magnets with corner ahead or behind, the optimization of time travel and self-organization during the converting of energy type and information forms that provides a receiving of synergistic effect.
Текст научной статьи Информационные технологии в электромехатронике
Мехатронизация техносферы в процессе ее информатизации
Эволюция мехатроники свидетельствует о том, что прародительницей мехатроники стала техническая кибернетика (ТК), которая, как известно [1], явилась материнской наукой для информатики, обеспечивающей на современном этапе развития человечества переход от индустриального к информационному обществу, в котором определяющая роль принадлежит информационным технологиям (ИТ). Однако следует признать, что ИТ, являясь катализатором развития и прогресса, представляют собой лишь оболочку, которая при решении конкретных практических задач приобретает предметное наполнение. В последнее время в инженерной практике в качестве такого предметного наполнителя выступают мехатронные системы (МС) и ИТ, которые призваны определить облик техносферы XXI в. В 1995 г. основоположник ТК Н. Винер изложил прогноз новой парадигмы ее развития, указывая на то, что компьютерные технологии будут активно использоваться для управления механизмами.
Формирование мехатроники как области научно-технического знания и инженерной деятельности приходится на середину 1980-х гг. Оно явилось ответом на запросы практики: появление и резкий подъем производства микропроцессорных средств существенно расширили возможности электронных устройств управления и позволили при малых размерах и высокой надежности придать им такие новые свойства, как функциональная гибкость и перестраиваемость в соответствии с требованиями к преобразованию энергии и информации. Это привело к появлению нового научно-технического направления (НТН) «МЕХАТРОНИКИ» (Mechatronics). Термин был предложен японским инженером Tetsuro Moria (Тецуро Мориа) в 1969 г. компанией Yaskawa Electronic и зарегистрирован в качестве торговой марки в 1972 г. Название получено комбинацией слов «МЕХАника и элекТРОНИКА».
Структура и характерные особенности мехатроники
Мехатроника предусматривает объединение механики, электроники и информатики (рис. 1, а). Результатом этого союза становится появление интеллекта и синергетического эффекта. Междисциплинарный характер мехатроники наглядно демонстрирует логотип (рис. 1, б), предложенный МИРЭА. Наиболее эффективным и перспективным в мехатронике является ис- пользование в качестве энергоносителя электроэнергии. Поэтому прикладная мехатроника в большинстве случаев базируется на использовании электромеханики и микроэлектроники. В отличие от автоматизированных электроприводов (АЭП) [2], не обладающих интеллектом и синергией, такие модули мехатронных систем принято именовать ЭМТП [3], логотип которого представлен на рис. 1, в. Из него следует, что ЭМТП содержат ЭМК и МЭК, осуществляющие преобразование формы энергии и видов информации в перемещение.

а)
Зл ектромскан нм ески с
Датмини
Моделирование систем
Системы

Микроконтроллеры
Симуляций
Компьютерное управление
б)
Рис. 1. Логотипы мехатроники (а), ее междисциплинарного характера (б) и ЭМТП (в)

в)
Межотраслевой характер рассматриваемого НТН требует адекватного государственного подхода к организации работ п о его развитию. Именно так, например, начи налось развитие мех а-троники в Японии – лидере в этой области, все достижения получены им енно благодаря тому, что опережающее ра звитие ме хатроники было признано стратегической г осударственной зад а чей. Аналогичный государстве нный подход к развитию мехатроники проя вили в США, Герм а нии, Великобритании, Республике Корея, Тайване и Китае.
Результативность развития мехатроники в XX веке подтверждает S. Yaskawa (С. Яскава), который в докладе «Future Trend in Intelligent Mechatronics Systems» на Седьмом Mechatronics Forum, Sept. 2000 in Atlanta, USA заявил: «Эта концепция увеличила производительность в таких отраслях, как автомобилестроение, компьютеры, средства связи и дала возможность глобальному развитию. Это привело к эфф ективности массового производства. Оно бы ло сконцентрировано на получение материально й вы годы. Теперь мы должны взять в свое расп оряжение концепцию окружающей среды – полный жизненный цикл и „стряхнуть пыль“ – наше дело».
Эти рекомендации остают ся актуальными для региона Южного Урала, где необходимо тщ а тельно «стряхнуть пыль» и уделить вни мание совершенствованию инновационных разработок, направленных на улучшение экологической ситуации в зоне Восточно -Уральского радиоактив ного следа, где для реабилита ции загрязненных территорий необходимо ш ире использовать р о ботизированные агрегаты, способн ые работать в условиях повышенной радиации [4].
Нашей стране потребовало сь четверть века для оценки эффективности внедренных в 80 -х гг. прошлого столетия инноваций в области электромехатроники [5]. Ряд извес тных [6] технических решений в части информацион ного обеспечения остался незамеченным в большинстве случаев из- за опережения реальных по требностей (спроса) и застойного периода в развитии науки и те х ники. Существенную роль сыг рало то, что разные направления мехатроник и развиваются изол ированно, обмен ин формацией между ними минимален. Справедливым оста ется замечание осн ователя ТК Н. Винера: «Важные исследования задерживаются из -за того, что в одной области не известны результаты, уже давн о ставшие классическими в смежной области » [7].
Положительную роль в ста новлении и развитии НТН в РФ играет журн ал «Мехатроника, а в томатизация, управление», бол ее 100 номеров которого вышло в свет. Жур нал издается более 10 лет, входит в «Перечень росс ийских рецензируемых научных журналов» , в которых должны быть опубликован ы основные научные результаты диссертаций на соиска ние ученых степеней доктора и кандидата наук» и доступен для широкого круга читателей.
Мехатронный подход при электронизации ЭМТП
Различия мехатронного и традиционного подходов к проектированию ЭМТП состоит в концепции построения и реализации структурного, алгоритмического и информационного обеспечения преобразования энергии и информации в функциональное движение РМ [7]. При традиционном проектировании АЭП интерфейсы являются отдельными устройствами. Мехатронный подход предусматривает минимизацию интерфейсов и промежуточных преобразований, путем агрегатирования элементов [8] в модули ЭМК и МЭК, допускающие их раздельное размещение.
Мехатронный подход предусматривает поэтапную электронизацию ЭМТП, заключающуюся в переносе функциональной нагрузки от ЭМК в МЭК [1]. При этом совершенствование МЭК достигается использованием микроконтроллерной обработки массивов информации, ЕИО и минимизацией интерфейсных связей между компонентами, структура которых предусматривает обмен информацией по силовым цепям управления БЭПМ [9].
Наиболее весомым стал первый этап комплексной электронизации, позволивший отказаться от 200-летней традиции обеспечения низких скоростей РМ, предусматривающей использование высокоскоростного электродвигателя с редуктором или коробкой передач, снижающих эксплуатационные показатели.
Мехатронный подход позволил осуществить электронизацию приемной стороны традиционной следящей электромеханической дистанционной передачи угла поворота. Результатом этого этапа электронизации стало получение в рамках ЕИО на приемной стороне цифровых эквивалентов необходимого набора составляющих: величины и ее ортогональных составляющих, скорости и ускорения перемещения. Первый этап электронизации ЭМТП характеризуется реализацией ЕИО [10] с ПИП на основе СКС. Это привело к предельному упрощению структуры ЭМК и интерфейса с усложнившейся МЭК. Ей были переданы функции окончательного формирования из выходных сигналов СКС цифровых эквивалентов составляющих перемещения.
Второй этап электронизации связан с переходом в МЭК от аппаратной схемотехники [6] к программируемым МК. Это, в определенной степени, компенсировало усложнение МЭК, но сделало разработчика аппаратуры зависимым от поставок импортных комплектующих. Современное положение с санкциями на поставки элементов двойного назначения делает рискованным продолжение движения в этом направлении. Выход из этой ситуации один – развитие собственной производственной базы и стимулирование конвергенции нанотехнологий в мехатронику [1].
Современный этап электронизации ЭМТП
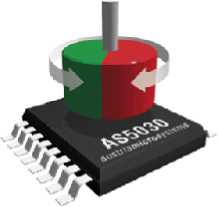
Третий этап электронизации ЭМТП направлен на упрощение ЭМК за счет перехода от кинестетических электромашинных СКС [11] к генераторным синусно-косинусным магнитным энко-дерам (СКМЭ) [12], использующим известный эффект Холла (рис. 2, а) или открытый в 1988 г. эффект гигантского магниторезонанса (ГМР). В первом варианте предусмотрено формирование составляющих скорости в импульсной форме [13]. Это снижает помехозащищенность СКМЭ, основанных на эффекте Холла, усложняет коррекцию динамической погрешности, которая на высоких скоростях составляет несколько процентов. Формирование параллельного тахометрического канала [12] исключено из-за отсутствия возможности использования сигналов ортогональных составляющих углового перемещения на выходе ПИП.
В этом отношении большими возможностями обладают СКМЭ на основе ГМР. Квантомеханический эффект ГМР, наблюдаемый в тонких металлических пленках, чередующихся ферромагнитных и проводящих немагнитных слоев, состоит в существенных вариациях электрического сопротивления такой структуры при изменении взаимного направления намагниченности соседних магнитных слоев. Направлением намагниченности можно управлять, например, положением внешнего магнитного поля. В основе эффекта лежит рассеяние электронов, зависящее от направления спина. За открытие ГМР физики А. Ферт и П. Грюнберг были удостоены Нобелевской премии по физике в 2007 году.
Компания Infineon Technologies производит СКМЭ типа TLE5012В (рис. 2, б), определяющий угол в диапазоне 360° по изменению направления магнитного поля. Измерение производится на основе встроенных ГМР элементов, соединенных в мостовую схему, сопротивление которых меняется в зависимости от направления магнитного поля. Микросхема содержит встроенные АЦП и ЦСП для тригонометрических преобразований. Предусмотрена возможность измерения угловой скорости магнита, что позволит компенсировать динамическую составляющую погрешности измерения. Цифровые выходы ортогональных составляющих перемещения имеют разрядность 16 бит.
а)

б)
Рис. 2. СКМЭ на основе эффектов Холла (а) и ГМР (б)
Высокая разрядность этих выходов обеспечивает формирование контура положительной местной обратной связи, охватывающей БЭПМ и обеспечивающей его дискретное управление с высоким качеством движения безредукторного ЭМТП в режиме самокоммутации за счет изменения как угла коммутации, так и широтно-импульсной модуляции независимо от числа пар полюсов. Такой СКМЭ приближается по своим функциональным возможностям к полифункциональ-ному преобразователю (ПФП) [14] и может использоваться непосредственно в ЭМТП, не требующих формирования составляющей ускорения.
К существенным достоинствам варианта СКМЭ на основе ГМР является простота реализации на его основе амплитудного ПФП, для которого составляющая ускорения перемещения может быть получена в МК дифференцированием цифрового эквивалента скорости [15]. Современные СКМЭ часто предусматривают формирование в двоичном коде только составляющих величины перемещения, а скорость в них представляется в числоимпульсном коде. Считается, что новое поколение энкодеров фактически формализовало границы между сенсорами положения и скорости, как, впрочем, и различия между эффектами Холла, анизотропного, гигантского и туннельного магнитных резонансов [13].
Многокомпонентный следящий преобразователь на основе ГМР
В ответственных применениях и самоорганизующихся МС необходимо иметь все составляющие ЕИО в абсолютных кодах. Для решения этой задачи достаточно обеспечить доступ к выходным ортогональным составляющим перемещения в аналоговой или цифровой форме. Это позволит сформировать недостающие составляющие в аналоговой форме многокомпонентным следящим преобразователем, структура которого представлена ни рис. 3.
Необходимые для ЕИО аналоговые составляющие скорости и ускорения формируются совместно с оцифрованной составляющей перемещения в электронной следящей системе (ЭСС) [6].
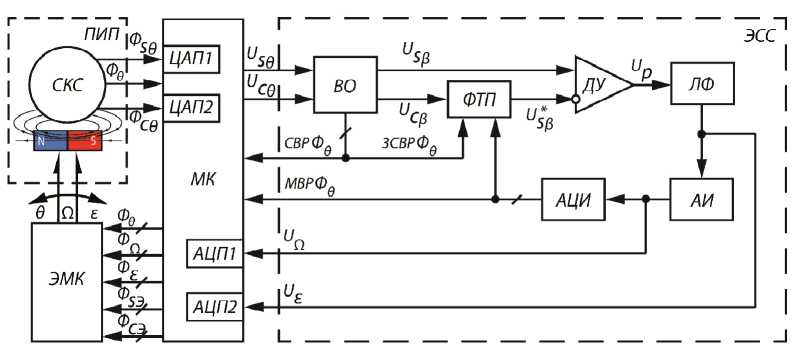
Рис. 3. Структура многокомпонентного следящего преобразователя
Синусно-косинусный сенсор СКС на основе ГМР формирует на своих выходах коды перемещения Фθ и его ортогональных составляющих Ф S θ и Ф C θ. Последние конвертируются в микроконтроллере МК в аналоговые компоненты ортогональных составляющих перемещения US θ и UC θ, которые поступают на вход выявителя октанта ВО . На его цифровом выходе формируется код октанта, представляющий три старших по весу разряда СВР перемещения Ф θ .
На аналоговых выходах ВО формируются сигналы U S β и U C β , представляющие приведенные в первый октант фрагменты сигналов U S θ и U C θ – от 0 до 45° θ. Сигнал U S β поступает на прямой вход дифференциального усилителя ДУ , на инверсный вход которого поступает сигнал U* S β с выхода ФТП , управляемого цифровыми сигналами с выходов ВО и АЦИ . Таким образом, формируется сигнал рассогласования U p, дальнейшее преобразование которого производится линейным фильтром ЛФ . Он подавляет гармоники и квадратурные составляющие, которые возрастают при вращении магнита NS , работающего в режиме генератора. Фильтрация обеспечивает подавление низкочастотных помех в сигнале рассогласования ЭСС с астатизмом второго порядка и ограниченной полосой пропускания [6].
На выходе ЛФ формируется напряжение U ε , представляющее аналоговый эквивалент, близкий по своей величине к ускорению ε входного воздействия (см. рис. 3). Аналоговый интегратор АИ позволяет конвертировать напряжение U ε в напряжение U Ω представляющее аналоговый эквивалент, близкий по своей величине к скорости Ω входного воздействия (см. рис. 3).
Аналого-цифровой интегратор АЦИ формирует позиционный двоичный код младших по весу разрядов МВР цифрового эквивалента Фθ, который в МК путем совмещения с СВР кода октанта образует цифровой эквивалент перемещения в диапазоне от 0 до 360°. Цифровые эквиваленты составляющих скорости Ф Ω и Ф ε формируются посредством конвертирования в МК соответственно АЦП1 и АЦП2 сигналов U Ω и U ε .
В электромеханическую компоненту ЭМК поступают сформированные в МК цифровые эквиваленты: величины Фθ, скорости ФΩ и ускорения Фε перемещения и ортогональные сигналы Ф S Э и Ф С Э . Первые используются в качестве цифровых обратных связей для формирования соответствующих законов управления ЭМТП [7], а вторые – в качестве местной обратной связи управления электродвигателем в режиме самокоммутации [16].
Заключение
Состояние мехатроники характеризуется сложностью осознания ее необходимости потребителями и разработчиками. При этом следует учитывать то, что развитие мехатроники, как междисциплинарного НТН, помимо очевидных технико-технологических сложностей ставит и целый ряд новых организационно-экономических проблем. Их решение требует преодоления сложившихся на предприятиях традиций в управлении и амбиций менеджеров среднего звена, привыкших решать только свои узкопрофильные задачи.
Принцип ЕИО гармонично вписывается в структуру и конструктивное исполнение безредук-торного ЭМТП, обладающего более высокими эксплуатационными показателями по сравнению с редукторным вариантом. Агрегатирование СКС с БЭПМ упрощает конструкцию МЭК. Комплексное применение ИТ обеспечивает интеллектуализацию, которая совместно с электронизацией дает синергетический эффект.
Конвергенция нанотехнологий в мехатронику приведет, в конечном итоге, к полной электронизации ЭМТП. Это следует из принципиальной возможности агрегатирования в единое целое СКМЭ с БЭПМ, магнитное поле ротора которого будет через индукцию формировать в ПИП ортогональные составляющие угла поворота, т. е. придавать агрегату свойства хронотопа, осуществляющего связь пространства и времени [17].
Предложено построение ЭСС, в отличие от традиционных вариантов с электромагнитными СКС [6], не предусматривает модуляцию-демодуляцию сигнала, формируемого ПИП. Это достигается в процессе электронизации ЭМК заменой кинестетических сенсоров генераторными, которые формируют ортогональные составляющие на основе физических эффектов Холла, анизотропного, гигантского и туннельного магнитных резонансов [13].
Анализ подтвержденных практических достижений в области ИТУ и электронизации свидетельствует о том, что имеет место расширение классической механической парадигмы меха-троники, связанное с переходом от компьютерного управления механическими процессами к аналогичному управлению физическими процессами, то есть к более сложным физическим формам движения [1].
Список литературы Информационные технологии в электромехатронике
- Теряев, Е.Д. Мехатроника как компьютерная парадигма развития технической кибернетики/Е.Д. Теряев, Н.Б. Филимонов, К.В. Петрин//Мехатроника, автоматизация, управление. -2009. -№ 6. -С. 2-10.
- Усынин, Ю.С. Системы управления электроприводов: учеб. пособие/Ю.С. Усынин. -2-е изд., испр. и доп. -Челябинск: Изд-во ЮУрГУ, 2004. -328 с.
- Коськин, Ю. П. Введение в электромеханотронику/Ю.П. Коськин. -СПб.: Энергоатом¬издат, Санкт-Петербургское отделение, 1991. -192 с.
- Smirnov, Yu.S. Robototechnical Complexes for Radioactive Accidents Aftermath Removal/Yu.S. Smirnov//Book of abstracts VIII International Symposium «Ural Atomic, Ural Industrial». -Екатеринбург: УрО РАН, 2000. -P. 37-40.
- Смирнов, Ю.С. Внедрение инноваций -источник ресурсосбережения/Ю.С. Смирнов//Материалы ВНПК «Экологическая безопасность и современные технологии». -Миасс, 2009. -С. 270-275.
- Домрачев, В.Г. Цифроаналоговые системы позиционирования/В.Г. Домрачев, Ю.С. Смирнов. -М.: Энергоатомиздат, 1990. -240 с.
- Смирнов, Ю.С. Электромехатронные преобразователи/Ю.С. Смирнов; под ред. А.Л. Шестакова. -Челябинск: Издат. центр ЮУрГУ, 2013 -361 с.
- Подураев, Ю.С. Мехатроника: основы, методы, применение: учеб. пособие/Ю.С. Поду¬раев. -М.: Машиностроение, 2006. -256 с.
- Mikerov, A.G. Brushless ВС Torque Motors Quality Level Indexes for Servo Drive application/A.G. Mikerov//Proceedings of International Conference JEEE Eurocon 2009, St. Petersburg, Russia, May18-23, 2009. -С. 827-834.
- Smirnov, Yu.S. Common Dateware of Robotics Mechatronic Converters Proc. of the Third ISMCR’93/Yu.S. Smirnov. -Italy, Torino, 1993. -P. 13-18.
- Smirnov, Yu.S. Analog-to-Digital Converters of Components of a Displacement based on Primary Electromechanical Converters/Yu.S. Smirnov, T.A. Funk, P.B. Serebryakov//Measurement Techniques. -2014. -Vol. 56, iss. 9. -P. 1026-1030.
- Analog-to-Digital Converters of the Components of a Displacement with the Use of Microelectronic Sine-Cosine Magnetic Encoders/Yu.S. Smirnov, T.A. Kozina, E.V. Yurasova, A.V. Sokolov//Measurement Techniques. -2014. -Vol. 57, iss. 1. -P. 41-46.
- Сысоева, С. Разработка нового поколения датчиков магнитного поля/С. Сысоева//Компоненты и технологии. -2014. -№ 1. -С. 40-46.
- Смирнов, Ю.С. Полифункциональный фазовый преобразователь перемещения/Ю.С. Смирнов, Е.В. Юрасова, Т.А. Козина//XII Всероссийское совещание по проблемам управления ВСПУ-2014. . -М.: ИПУ им. В.А. Трапезникова РАН, 2014. -С. 7171-7182.
- Балковой, А.П. Прецизионный электропривод с вентильными двигателями/А.П. Балковой, В.К. Цаценкин. -М.: ИД МЭИ, 2010. -328 с.
- Особенности информационного обеспечения безредукторных электромехатронных преобразователей/Ю.С. Смирнов, Д.А. Кацай, Т.А. Функ, Я.О. Анисимов//Материалы конференции «Информационные технологии в управлении» (ИТУ-2014). -СПб.: ОАО «Концерн «ЦНИИ «Электроприбор», 2014. -С. 729-737.
- Повышение эффективности формирования эквивалентов составляющих перемещения/Ю.С. Смирнов, Д.А. Кацай, Е.В. Юрасова, И.С. Никитин//Материалы конференции «Информационные технологии в управлении» (ИТУ-2014). -СПб.: ОАО «Концерн «ЦНИИ «Электроприбор», 2014. -С. 710-719.
