Интеллектуальное робастное управление динамически неустойчивым объектом управления на основе квантовых мягких вычислений

Автор: Решетников Андрей Геннадьевич, Керимов Тимур Александрович, Ульянов Сергей Викторович
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 1, 2015 года.
Бесплатный доступ
Рассматривается технология проектирования интеллектуальной системы управления на основе квантового нечеткого вывода в двух вариантах: с использование дистанционного подключения к объекту управления и с использованием верифицированной математической модели. Использование разработанной методологии проектирования основано на самоорганизации знаний и приводит к повышению уровня робастности интеллектуальных систем управления в непредвиденных ситуациях управления. В качестве информационных источников для проектирования нечетких регуляторов используются два варианта: в первом случае применяется математическая неточная (с недоопределенными параметрами) модель объекта управления, второй вариант основан на процессе измерения сигнала обучения с реального объекта управления. Проводится сравнение результатов моделирования и физического эксперимента ПИД-регулятора, нечетких регуляторов и квантовых нечетких регуляторов с различными типами корреляциями. Показана эффективность применения квантового нечеткого вывода для повышения робастности интеллектуального управления в непредвиденных (нештатных) ситуациях управления.
Интеллектуальное управление, квантовый алгоритм, самоорганизация, база знаний, квантовая информация, квантовый нечеткий вывод
Короткий адрес: https://sciup.org/14122620
IDR: 14122620
Quantum computing technologies in intelligent control
The article discusses the technology of designing intelligent control system based on quantum fuzzy inference in two versions: with the use of remote connection to control object and with using a verified mathematical model. The use of the design methodology based on self-knowledge and lead to increased robustness of control systems in emergencies. As a source of information for the design of fuzzy controller used: in the first case of a mathematical model and in second the process of learning (GA-PID) of real object.A comparison of simulation results and experiment with physical object for PID - controller, fuzzy controller and fuzzy quantum controller with the various correlations introduced.
Текст научной статьи Интеллектуальное робастное управление динамически неустойчивым объектом управления на основе квантовых мягких вычислений
Практика и результаты моделирования показали, что в условиях неопределенности или неточности исходной информации, непредвиденных ситуациях или информационного риска традиционный (использующий принцип глобальной отрицательной обратной связи) и широко применяемый в промышленности ПИД-регулятор часто не справляется с поставленной задачей управления. В тоже время, решение задачи о глобальной робастности ПИД-регулятора до настоящего времени неизвестно, несмотря на актуальность данной проблемы.
Использование нечетких регуляторов (НР) совместно с ПИД-регулятором привело к созданию гибридных нечетких ИСУ с различными уровнями интеллектуальности в зависимости от полноты и корректности спроектированной базы знаний (БЗ). Использование технологии мягких вычислений (основанной на генетических алгоритмах и нечетких нейронных сетях) расширило области эффективного применения НР за счет добавления новых функций в виде обучения и адаптации. Однако в общем случае нештатных ситуаций управления очень трудно спроектировать глобально «хорошую» и робастную структуру ИСУ. Данное ограничение особенно характерно для непредвиденных ситуаций управления, когда ОУ функционирует в резко изменяющихся условиях (отказ датчиков или шум в измерительной системе, наличие времени задержки сигналов управления или измерения, резкое изменение структуры ОУ или её параметров и т.п.). Решение такого рода проблем может быть найдено на основе введения принципа самоорганизации БЗ в процесс проектирования НР, который реализуется и программно поддерживается разработанной моделью КНВ с применением методологии квантовых мягких вычислений и системной инженерией – SystemofSystemEngineering (синергетический принцип самоорганизации) [9].
Предлагаемая модель КНВ использует частные индивидуальные БЗ НР, каждая из которых получается с помощью оптимизатора баз знаний (ОБЗ) для соответствующих условий функционирования ОУ и фиксированных ситуаций управления во внешней случайной среде. Процесс проектирования частных индивидуальных БЗ НР с помощью программного инструментария ОБЗ для заданных ситуаций управления осуществляется в соответствии с технологией проектирования и подробно рассмотрен в [8].
Структура и основные функции квантового нечеткого вывода
Основной задачей, решаемой КНВ, является формирование БЗ с повышенным уровнем робастности из конечного множества БЗ для НР, сформированных с применением технологии мягких вычислений. Рассмотрим кратко функциональную структуру и работу основных блоков КНВ. В качестве примера, без потери общности результата, обсудим процессы извлечения скрытой квантовой информации, обработки данных и формирования робастной БЗ НР, используя БЗ двух НР, спроектированных для фиксированных (отличных друг от друга) ситуаций управления.
На рис. 1 показана функциональная структура модели КНВ [9].
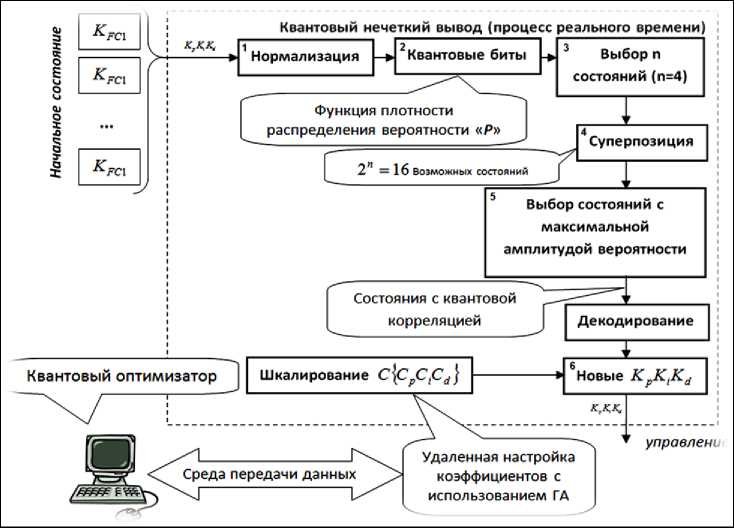
Рис. 1. Функциональная структура КНВ в процессе реального времени
На вход КНВ в реальном времени поступают сигналы управления от сформированных заранее БЗ НР (шаг «Начальное состояние» рис.1). Следующим шагом является процесс нормализации (блок 1 на рис. 1) полученных сигналов в интервале [0, 1] путем деления амплитуд траектории сигналов управления на максимальные амплитуды (блок 1 на рис. 1). После нормировки сигналов осуществляется формирование квантовых битов (блок 2 на рис. 1) из текущих значений нормированных сигналов управления. С этой целью предварительно определяется функция плотности распределения вероятности по представленным выборочным траекториям сигналов управления. Далее путем интегрирования полученной функции плотности распределения вероятности определяются интегральные функции распределения вероятностей (блок 2 на рис. 1).
Полученные таким образом функции распределения вероятности позволяют выделить «виртуальные» состояния Ц сигналов управления для формирования суперпозиции с помощью преобразования Адамара из текущего состояния введенных сигналов управления. При этом используется закон вероятности типа Р (|0^) + Р (Ц) = 1 , где Р | 0^ и Р | 1 - вероятности текущего реального и виртуального состояний сигнала управления, соответственно. Для текущего реального нормированного состояния сигнала управления 10^ с помощью интегральной функции распределения вероятности определяется его вероятность. Далее из закона сохранения вероятностей рассчитывается вероятность виртуального состояния сигнала управления. Используя тот же интегральный закон распределения вероятностей, путём обратного отображения, вычисляется численное значение соответствующего виртуального состояния сигнала управления.
Следовательно, суперпозиция квантовой системы «реальное состояние – виртуальное состояние»
имеет следующий вид: | у^ = —т= (^ В (|0))|0) + ^ - - В (| 0)) 11) = квантовый бит. 2
На рис. 2 отображен схематично вычислительный процесс и формирование квантового бита для текущего состояния нормированного сигнала управления, описывающего коэффициенты усиления нечеткого ПИД-регулятора в структуре ИСУ.
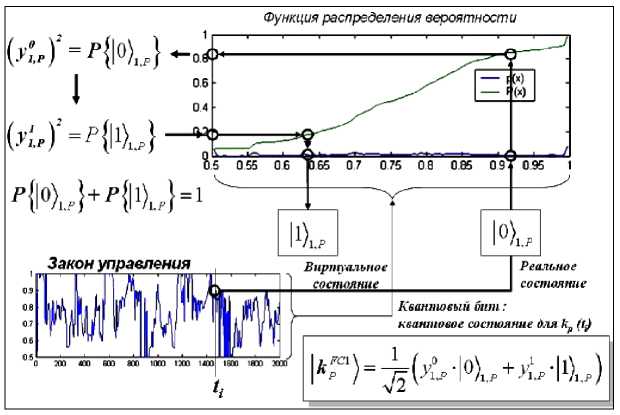
Рис. 2. Процесс формирования квантовых битов (блок 2)
Далее осуществляется выбор типа квантовой корреляции (рис. 1, блок 3) из соответствующих компонент для используемого типа корреляции из нормированных сигналов управления. Для рассматриваемой ситуации возможны три типа квантовой корреляции (содержащих скрытую в спроектированных БЗ ценную квантовую информацию): пространственная, временная и пространственновременная.
На рис. 3 показаны перечисленные три типа корреляции между процессами управления коэффициентами усиления двух нечётких ПИД-регуляторов.
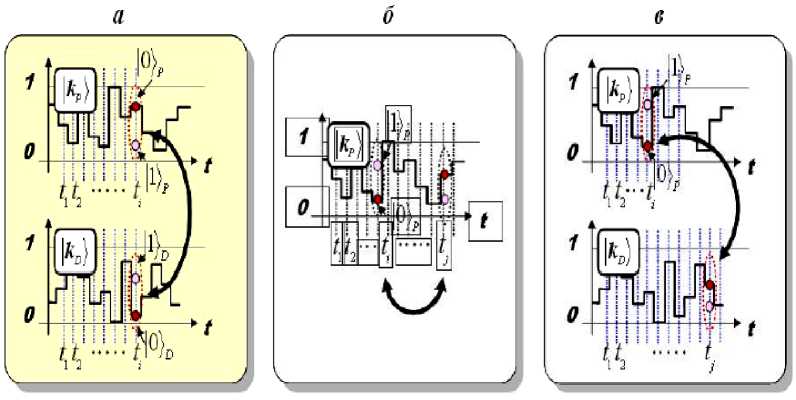
Рис. 3. Типы квантовых корреляций в законах управления коэффициентами усиления нечёткого ПИД-регулятора в процессе реального времени: а – пространственная, б – временная, в – пространственновременная
На рис. 4 приведен пример формирования пространственной корреляции в КНВ из сигналов управления коэффициентами усиления двух нечётких ПИД-регуляторов, БЗ которых спроектированы с помощью инструментария ОБЗ для двух различных ситуаций управления.
Согласно рис. 4 квантовая пространственная корреляция (как тип) классифицируется, в свою очередь, на два вида корреляций: внутренняя и внешняя. Внутренняя корреляция формируется за счет установления статистических взаимосвязей между выходными сигналами управления коэффициентами усиления заданного первого НР типа K FC 1 . Внешний вид корреляции характеризует связь между соответствующими сигналами управления первого K и второго K НР, где индекс « FC1 » означает нечёткий регулятор 1 (НР1), а индекс « FC2 » означает нечёткий регулятор 2 (НР2). Более подробное описание обозначений на рис. 4 дано ниже.
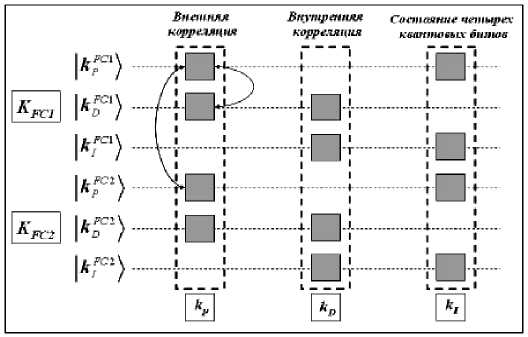
Рис. 4. Процесс формирования внутренней и внешней пространственной корреляции для новых коэффициентов усиления k , k , k, р
Отметим также, что аналогичные рассуждения справедливы для временной и пространственновременной корреляций. В результате формирования таких типов и видов квантовой корреляции осуществляется координационное управление между коэффициентами усиления за счёт соответствующей внутренней и внешней силы корреляции. Следовательно, для конкретного рассматриваемого случая двух НР каждое квантовое состояние суперпозиции выбранного коэффициента усиления описывается четырьмя квантовыми битами.
Рассмотрим алгоритм формирования суперпозиции (рис.1, блок 4) для вычисления оптимального значения, например, пропорционального коэффициента усиления нечёткого ПИД-регулятора (рис.1, блок 5), используя БЗ двух НР из разных ситуаций управления. Остальные коэффициенты вычисляются по аналогичному алгоритму.
На рис. 5 показан пример вычисления искомого множества значений пропорционального коэффициента усиления из множества комбинаций { k F2 1 , k FC 2 , k FC 1 , k FC 2 }.
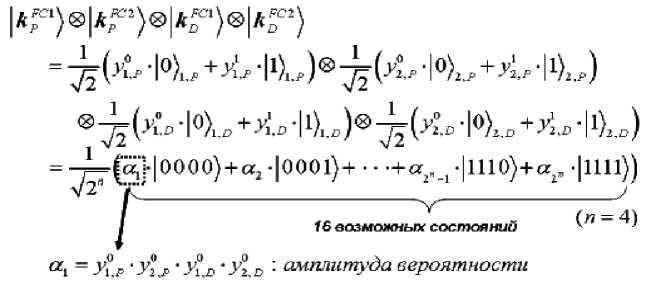
Рис. 5. Пример вычисления пропорционального коэффициента усиления k на основе множества {
FC 1 FC 2 FC 1 FC 2
kp , kp , kd , kd }: новый kp (суперпозиция четырех выбранных состояний)
Здесь k FC 1 - используемое значение сигналов управления пропорциональным коэффициентом усиления БЗ первого НР, спроектированного для первой фиксированной ситуации управления; k FC 2 -значение сигналов управления дифференциальным коэффициентом усиления БЗ второго НР, разработанного для второй ситуации управления (существенно отличающейся от первой по внешним условиям функционирования ОУ).
Применяя тензорное произведение между преобразованиями Адамара, получим члены вида k FC 1 0 k FC 2 и аналогичные комбинации коэффициентов усиления. Как видно из обозначений на рис.
5, имеется 16 возможных состояний, описывающих комбинации корреляций (с учетом их типа и вида) между соответствующими коэффициентами усиления двух НР, спроектированных для разных ситуаций управления.
Следует отметить принципиальную особенность процесса формирования и проектирования нового вида робастных коэффициентов усиления нечёткого ПИД-регулятора за счёт применения квантового оператора суперпозиции. Новые типы и виды квантовой корреляции позволяют осуществить координационное управление коэффициентами усиления только за счёт физических ресурсов используемого вида корреляции. Это приводит к сжатию и устранению (редукции) избыточности информации в независимых законах управления коэффициентами усиления, извлечению наиболее ценной информации, и, как следствие, к повышению уровня робастности новой спроектированной БЗ за счет нового вида координации. Применение запутанных состояний в трёх типах корреляции даёт возможность повысить уровень робастности спроектированной БЗ (с помощью физических свойств запутанных состояний), используя эффект обмена информацией между квантовыми состояниями в сформированной суперпозиции (см. рис.1). Такой подход к проектированию робастных БЗ не имеет классических аналогов и отличается чисто квантовой природой получаемых эффектов проектирования. Выбор приоритетного в суперпозиции квантового состояния при фиксированном типе корреляции (в данном случае пространственном) осуществляется в блоке 5 на рис. 1. Вычислением амплитуд квантовых состояний в суперпозиции состояний со смешанными видами квантовой корреляции (блок 5 на рис. 1) и выбором среди них максимальной реализуется модель квантового оракула, обладающего (по определению понятия квантового оракула) необходимой информацией об искомом решении. Схематично данный алгоритм показан на рис. 6.
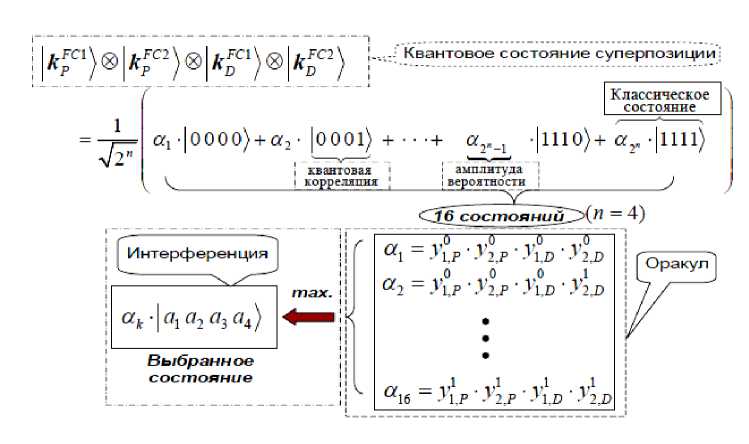
Рис. 6. Выбор квантового состояния по принципу максимума амплитуды вероятностей (минимума информационной энтропии Шеннона)
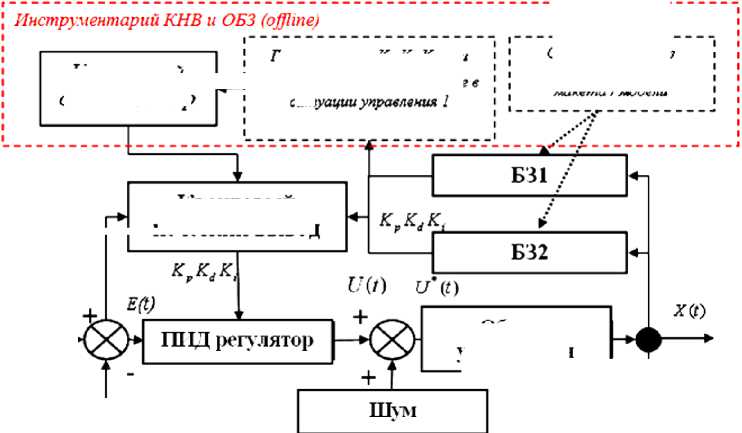
Используя стандартную процедуру декодирования (внутреннего произведения векторов в Гильбертовом пространстве) и выбирая коэффициенты шкалирования для выходных значений проектируемых коэффициентов усиления (рис. 1, блок 6), осуществляется итерационная работа КА КНВ. Возможность дистанционного подключения ОУ к стационарной вычислительной системы открывает возможность удаленной настройки, формированию и самоорганизации БЗ НР в режиме реального времени.
Квантовые вычисления на классическом процессоре: применение в робастном управлении неустойчивым ОУ
Проектированиесистемы управления на основе КНВ осуществляется с использованием разработанного программного инструментария «Квантовый оптимизатор» [9]. Технология применения КНВ позволяет объединять в единую систему управления несколько БЗ, и таким образом, позволяя нечет- ким нейронным сетям работать параллельно. Рассмотрим возможность применения КНВ для объединения БЗ, полученных на основе обучающего сигнала с физического объекта (ГА-ПИД регулятор) и верифицированной математической модели [8] (рис. 7). В таблице 1 приведено сравнение БЗ, используемых для формирования КНВ.
Таблица 1. Сравнение БЗ
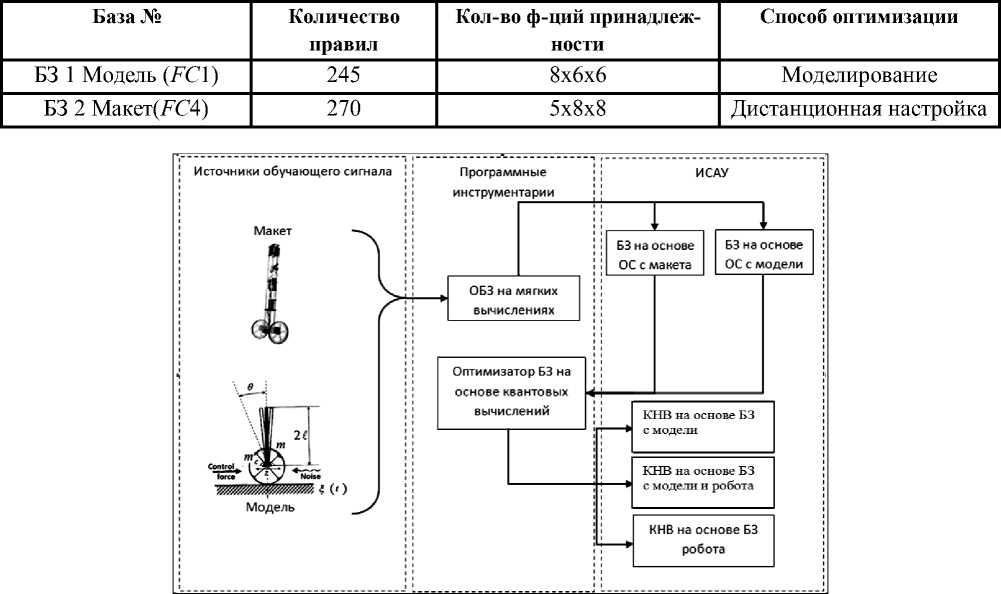
Рис. 7. Технология применения КНВ для проектирования робастных БЗ
Перед тем как приступить к созданию квантового НР, необходимо получить гистограммы распределения выходных сигналов (коэффициентов усиления) нечетких регуляторов (рис. 8).
Оптимизатор Баз Знаний. ОС с макета /модели
За дающий, сигнал
Квантовый оптимизатор
Гистограммы К^^К, при 4 моделировании/эксперименте
Квантовый нечеткий вывод
Объект травления
Система измерения
Рис. 8. Структура квантового нечеткого регулятора
Для этого проводится серия экспериментов и моделирования, в типовой ситуации управления. Используя полученные значения коэффициентов усиления при работе модели и макета, формируется массив данных для построения гистограмм коэффициентов усиления ПИД регуляторов (рис. 9).
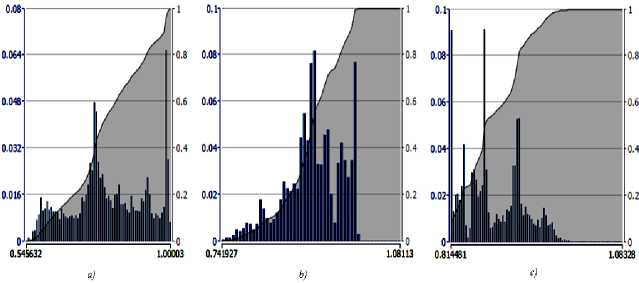
Рис. 9. Гистограммы выходных значений нечетких регуляторов
Построение гистограмм происходит автоматически при загрузке данных в квантовый оптимизатор. В дальнейшем они используются в алгоритме КНВ для формирования виртуальных состояний. Гистограммы коэффициентов усиления, полученные экспериментально, используются в формирования КНВ для робота (в физическом эксперименте), гистограмм коэффициентов усиления, полученные с использованием математической модели, применяются в формировании КНВ для моделирования. После загрузки данных, выбирается вид квантовой корреляции между коэффициентами усиления. Формирование запутанных состояний осуществляется на основе выбранной корреляционной матрицы, которая устанавливается в рабочем окне оптимизатора.
На следующем шаге, устанавливаются соответствующие максимальные и минимальные значения для входных и выходных сигналов КНВ и осуществляется настройка шкалирующих коэффициентов (блок 6, рис.1). Предполагается использовать математическую модель или дистанционное подключение к объекту управления, то есть дополнительного оборудования для приема-передачи данных, например, радиоканал Bluetooth , WiFi или подключение по кабелю, например, USB . Предполагается обмен информацией между ОУ и квантовым оптимизатором (КО), для поиска шкалирующих коэффициентов (блок 6, рис.1) квантового регулятора.В результате проектирования выходной сигнал из блока КНВ применяется для управления коэффициентами усиления ПИД-регулятора в случае моделирования математической модели, а для робота в физическом эксперименте применяется экспортируемый файл с расширением «*. с ».
Результаты моделирования и эксперимента
Рассмотрим применение разработанной модели КНВ для формирования процессов управления коэффициентами усиления нечеткого ПИД-регулятора. Для этого проведем компьютерное моделирование для двух ситуаций управления:
-
- в первой (типовой) ситуации (С1) задержка управляющего сигнала стандартная – 0.01 сек;
-
- во второй непредвиденной ситуации (С2) задержка управляющего сигнала – 0.04 сек (увеличенная в четыре раза).
В таблице 2 представлены параметры математической модели для С1 и С2.
Таблица 2. Ситуации управления и параметры математических моделей
|
Типовая ситуация (С1) |
Непредвиденная (С2) |
|
|
Начальный угол |
0гр |
0гр |
|
Начальная скорость |
1гр/с |
1гр/с |
|
Масса тележки |
0.56 кг |
0.56 кг |
|
Масса маятника |
0.63 кг |
0.63 кг |
|
Длина маятника |
0.05 м |
0.07 м |
|
Трение в креплении |
3.55 + нормированный шум с интенсивностью 0.01 и амплитудой 0.35 |
3.73 + нормированный шум с интенсивностью 0.01 и амплитудой 0.35 |
|
Трение колес |
3.63 + Гауссовский шум 15% |
3.63 + Гауссовский шум 15% |
|
Сила упругости |
5.54Н/м |
5.54Н/м |
|
Шум в системе управления |
Равномерный [-2.15 2.15], интенсивность 0.48 |
Равномерный [-2.15 2.15], интенсивность 0.48 |
|
Шум в системе измерения |
Амплитуда 0.22, Гауссовский шум, интенсивность 0.01 |
Амплитуда 0.32, Гауссовский шум, интенсивность 0.01 |
|
Задержка управляющего воздействия |
0.01 с |
0.04 с |
На рис. 10 представлена структура системы моделирования:
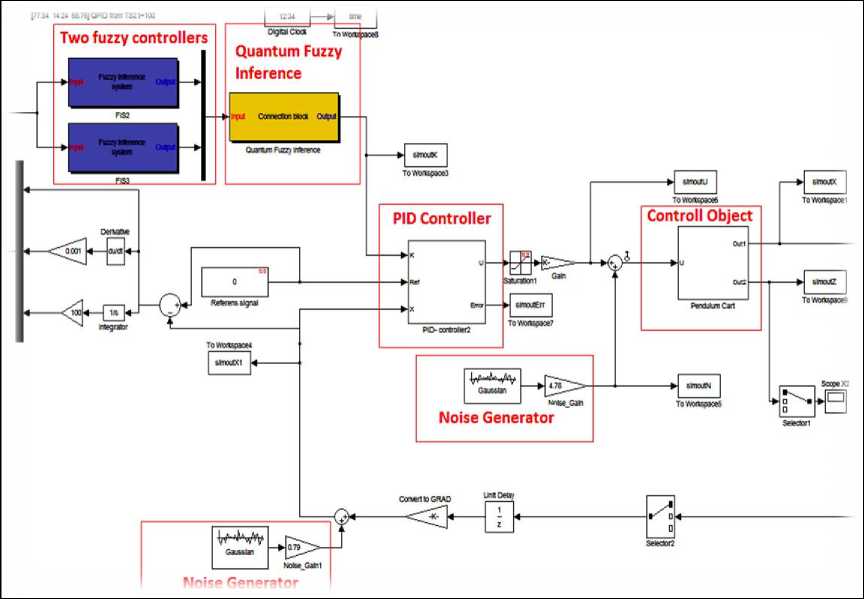
Рис. 10. Структура системы моделирования в среде MatLab/Simulink. На схеме обозначены: два нечетких регулятора; блок КНВ; ПИД - регулятор; объект управления; генераторы шумов
Результаты моделирования регуляторов в типовой ситуации управления проиллюстрированы на рис. 11-12.
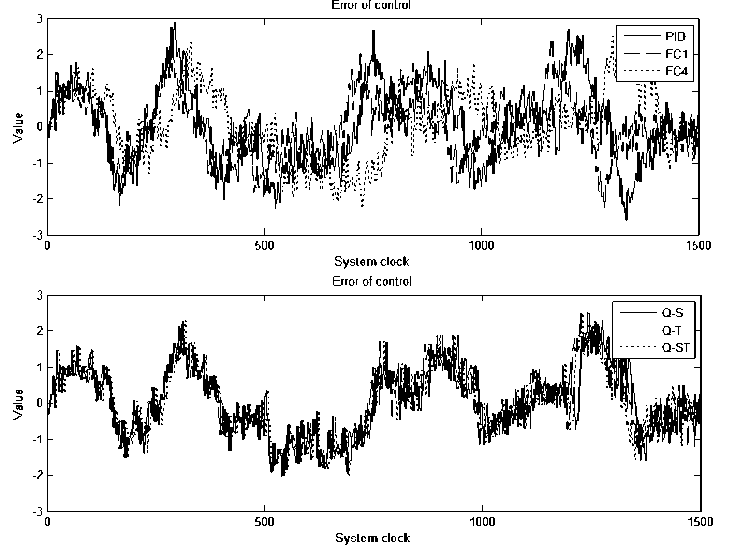
Рис. 11. Угол отклонения математической модели. Типовая ситуация управления (С1). Моделирование
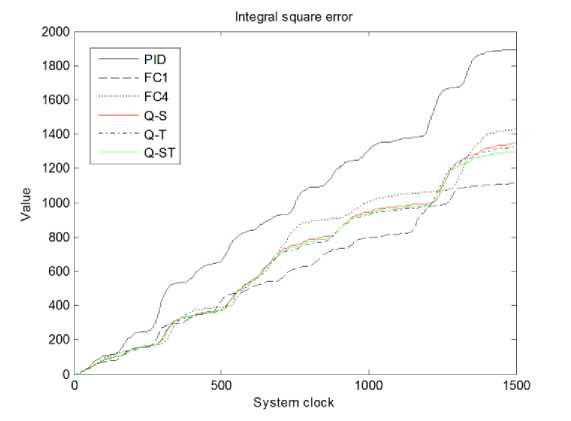
Рис. 12. Интеграл квадратичной ошибки. Типовая ситуация управления (С1). Моделирование
Рассмотрим связь между входными и выходными значениями КНВ на примере пропорционального коэффициента усиления. На рис. 13 представлены входные значения КНВ (коэффициенты усиления FC 1 и FC 4) и выходное значение пропорционального коэффициента КНВ cпространственной корреляцией.
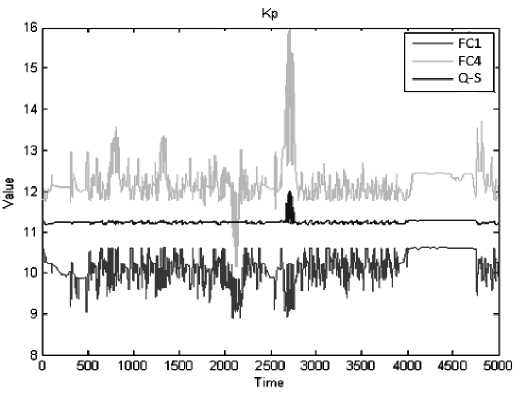
Рис. 13. Коэффициент усиления Кр. Входные и выходные значения КНВ. Моделирование в типовой ситуации управления
Далее на рис. 14 представлены результаты моделирования в непредвиденной ситуации управления.
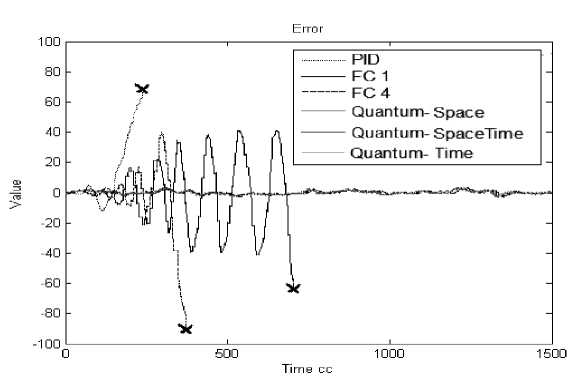
Рис. 14. Угол отклонения математической модели. Непредвиденная ситуация управления. Моделирование
На рис. 15 представлена общая диаграмма интеграла квадратичной ошибки моделирования.
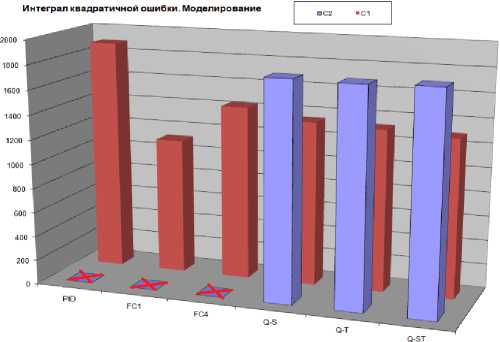
Рис. 15. Интеграл квадратичной ошибки. Непредвиденная и типовая ситуации управления. Моделирование. FC1-FC4 – нечеткие регуляторы, сокращения Q-quantum, S(Space) – пространственная, T(Time) – временная, ST(SpaceTime) – пространственно временная корреляции
Отметим, что на рис. 15 значение интегральной ошибки квантового нечеткого регулятора располагается между соответствующими графиками контроллеров, образовавших КНВ.
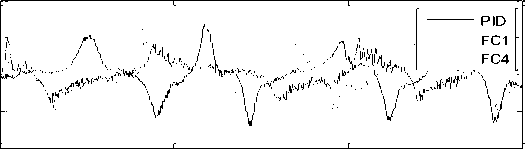
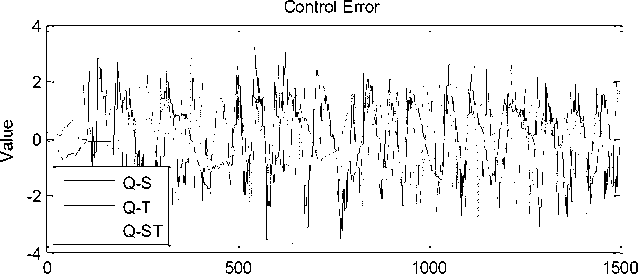
Рассмотрим результаты эксперимента в типичной ситуации управления. На рис. 16-18 представлены результаты экспериментов в типичной ситуации управления.

-2
Control Error
0 500 1000 1500
System clock
Рис. 16. Угол отклонения макета. Типовая ситуация управления. Эксперимент
-4
Control Error
Q-S
2 QQ--TST
-2
-4
System clock
Рис. 17. Угол отклонения макета. Типовая ситуация управления. Эксперимент
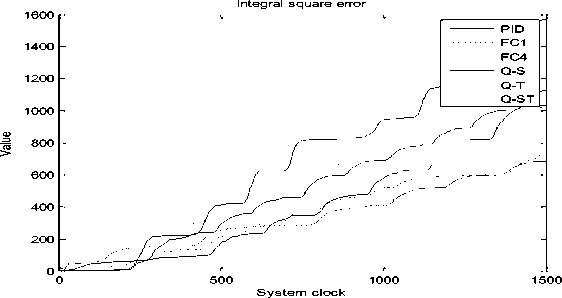
Рис. 18. Интеграл квадратичной ошибки. Типовая ситуация управления. Эксперимент
Рассмотрим результаты эксперимента в непредвиденной ситуации управления ( С 2). На рис. 19-21 представлены результаты экспериментов в непредвиденной ситуации управления.
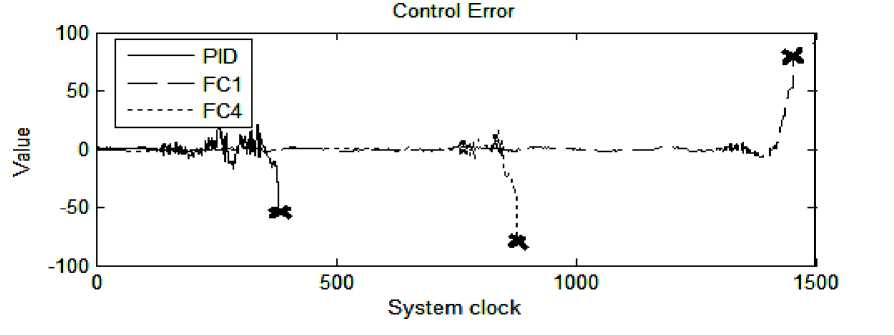
Рис. 19. Угол отклонения макета. Непредвиденная ситуация управления. Эксперимент
System clock
Рис. 20. Угол отклонения макета. Непредвиденная ситуация управления. Эксперимент
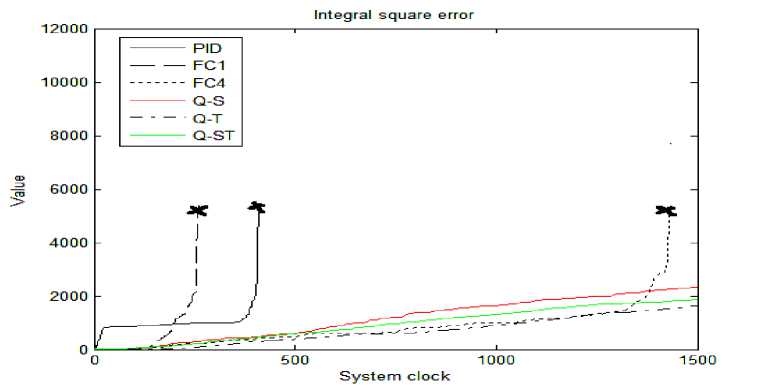
Рис. 21. Интеграл квадратичной ошибки. Типовая ситуация управления. Эксперимент
Оценка управления показала, что НР разработанные с использованием ОБЗ обеспечивают систему более простым управлением, что в конечном итоге положительно сказывается на сроке использования оборудования, снижая износ и энергопотребление.Разработанная методология объединения стратегий управления позволяет эффективно справляться с задачами управления даже в нештатных ситуациях, в которых с задачей управления не справляются НР лежащие в основе КНВ. Таким образом, имеем новый синергетический эффект за счет квантовой самоорганизации знаний: спроектированный на основе КНВ интеллектуальный регулятор справляется с поставленной задачей управления и имеет робастную БЗ, в основе которой лежат не робастные БЗ (см. рис. 19 и 21). При этом система управления на основе КНВ наследует лучшие характеристики качества управления от БЗ спроектированных ранее нечетких регуляторов, добавляя способность к самоорганизации в реальном времени.
Выводы
Технология квантового нечеткого вывода, не разрушая нижний исполнительский уровень управления, обеспечивает систему дополнительным свойством робастности только за счет использования программно-алгоритмического обеспечения. Проведенные эксперименты и моделирование показали, что интеллектуальное управление позволяет в непредвиденных ситуациях управления гарантированно достигать цели управления с минимальным расходом ресурса, что по своей сути отражает на содержательном уровне само определение целенаправленной деятельности ИСУ. Продемонстрировано существование непредвиденных ситуации управления, в которых НР не обладают требуемым качеством робастности, а квантовый нечеткий регулятор (на основе этих же НР) справляется с задачей управления на требуемом уровне качества управления. Установленный эффект подтверждает реализацию принципа самоорганизации БЗ за счет использования алгоритма КНВ. Показано применение квантовых вычислений на классическом процессоре в режиме реального времени. Результаты моделирования и экспериментов подтверждают полезность и эффективность использования скрытой квантовой информации, извлекаемой из классических состояний коэффициентов усиления, в процес- сах управления. Таким образом, показана эффективность и необходимость применения квантовых вычислений и алгоритмов управления не только для квантовых систем, но и для классических ОУ.
Список литературы Интеллектуальное робастное управление динамически неустойчивым объектом управления на основе квантовых мягких вычислений
- Khan H. PID controller: Comparative analysis and design diverse realizations (Moving towards efficient control in robotics and industries). - Lambert Academic Publishing House, 2012.
- Ульянов С.В., Литвинцева Л.В., Добрынин В.Н., Мишин А.А. Интеллектуальное робастное управление: технологии мягких вычислений. - М.: ВНИИгеосистем, 2011.
- EDN: QMWJSR
- Ulyanov S.V., Litvintseva L.V. Design of self-organized intelligent control system based on quantum fuzzy inference: Intelligent system of systems engineering approach // Proc. of IEEE Intern. Conf. on System, Man and Cybernetics (SMC'2005). - Hawaii, USA. - Vol. 4.
- Ulyanov S.V., Litvintseva L.V., Ulyanov S.S. et all. Quantum information and quantum computational intelligence: Backgrounds and applied toolkit of information design technologies. - Milan: Note del Polo (Ricerca), UniversitadegliStudi di Milano. - 2005. - Vol. 78-86.
- Ulyanov S.V. Self-organized intelligent robust control based on quantum fuzzy inference. - Recent Advances in Robust Control - Novel Approaches and Design Methods / A. Mueller (Ed.), Ch. 9, In Tech, 2011. - Pp. 187-220.
- Ульянов С.В., Сорокин С.В., Литвинцева Л.В. Оптимизатор баз знаний на основе квантовых вычислений для проектирования самоорганизующихся нечетких регуляторов: программный инструментарий // Системный анализ в науке и образовании: электрон. науч. журнал. - Дубна, 2012. - №1. - [Электронный ресурс]. URL: http://sanse.ru/download/118.
- Ulyanov S.V., Kurawaki I., Yazenin A.V. et all. Information analysis of quantum gates for simulation of quantum algorithms on classical computers // Proceedings of Intern. Conf. on Quantum Communication, Measurements and Computing (QCM&C'2000). - Capri. Italy, 2000. KluwerAcad. PlenumPubl. - 2001. - Pp. 207-214.
- Решетников А.Г., Ульянов С.В. Метод извлечения знаний из физически измеряемого сигнала обучения: проектирование баз знаний нечеткого регулятора // Системный анализ в науке и образовании: электрон. науч. журнал. - Дубна, 2013. - №1. - [Электронный ресурс]. URL: http://sanse.ru/download/154.
- Решетников А.Г., Ульянов С.В., Шоланов К.С. Робастное интеллектуальное управление физическим динамически неустойчивым объектом «Каретка-перевернутый маятник». Ч.2: Технологии квантовых вычислений // Системный анализ в науке и образовании: электрон. науч. журнал. - Дубна, 2013. - №1. - [Электронный ресурс]. URL: http://sanse.ru/download/155.
