Использование кватернионов при математическом моделировании механизмов с параллельными кинематическими цепями

Автор: Смирнов Владимир Алексеевич, Федоров Виктор Борисович
Рубрика: Расчет и конструирование
Статья в выпуске: 10 (110), 2008 года.
Бесплатный доступ
На примере механизма с параллельными кинематическими цепями, имеющего три степени свободы, показана возможность использования кватернионов при построении математических моделей таких механизмов.
Короткий адрес: https://sciup.org/147151425
IDR: 147151425 | УДК: 621.865.8
Текст научной статьи Использование кватернионов при математическом моделировании механизмов с параллельными кинематическими цепями
Одним из путей совершенствования технологического оборудования является использование при его построении нетрадиционных кинематических схем. Часто под такими схемами по нимают схемы механизмов, имеющих параллельные кинематические цепи, связывающие испол нительный орган с основанием [1-3].
Рис. 1
Наиболее известным механизмом с параллельными кинематическими цепями (МПКЦ) является платформа Стюарта - шестикоординатный механизм платформенного типа [4], схема которого показана на рис. 1. В данном механизме платформа соединена с основанием посредством шести штанг длиной L, . Каждая из штанг соединена с платформой сферическим шарниром В,, с основанием - через кардано-вый шарнир А,.
Длины штанг Lt целесообразно принять за обобщенные координаты рассматриваемого механизма, так как они однозначно описывают пространственную ориентацию платформы и удобны с точки зрения управления оборудованием, построенным на базе этого механизма. Однако с точки зрения практического использования более полезны параметры, непосредственно характеризующие положение платформы. Назовем эти параметры выходными координатами механизма. В качестве выходных координат могут выступать координаты сферических шарниров
В,-
Математическая модель механизма должна связывать его обобщенные и выходные коорди наты:
Д2 = (^А, - *в, )2 + <Уа, - )2 + ОА, - гВ/ )2, Z = 1 ...6. (1)
В шесть уравнений (1) входят шесть обобщенных координат и 18 выходных координат. Следовательно, не все выходные координаты являются независимыми. Поэтому уравнения (1) должны быть дополнены 12 уравнениями связи вида [5]
(хв. — хв ) +(Ув, — Ув^ +(zb, — zBj) ~|В/Ву| , (2)
где i* j и расстояния между шарнирами В, и В; известны и постоянны.
Выбором иных выходных координат можно существенно упростить математическую модель. Можно принять в качестве выходных координат механизма три линейные координаты некоторой характерной точки С платформы, назовем ее полюсом, в неподвижной системе координат OXYZ и три угловые координаты, определяющие разворот платформы вокруг полюса из некоторого начального состояния.
В качестве выходных угловых координат могут выступать, например, углы Крылова: угол рыскания ^, угол тангажа 9 , угол крена у [6]. Данные углы позволяют пересчитать координа-
Смирнов В. А., Федоров В.Б.
Использование кватернионов при математическом моделировании механизмов с параллельными...
ты сферических шарниров, заданные в системе координат СХ' Y'Z' , в систему координат OXYZ [5]:
*в, Ув, zb, 1
™1
«1 О
А т2 «2 О
Ц т3 «з О
хс Ус zc
у* л В/
У'в,
Z'b, 1
где /] = cos у/ cos у + sin 3 sin у/ sin у ; Z2 = sin^cos.9; Z3 =-cos у/ sin у + sin у/ sin 3 cos y.
mx = -sin у/cos у + sin <9 cos у/sin/; m2 = cosy/cos.9; m3 = sin у/sin у + cos у/sin 3 cosy;
И] =cos19siny; n2 = -sin.9 ; и3 = cosi9cos/.
В этом случае уравнения (1) после преобразований примут следующий вид:
А2 = (ХА, - ^с )2 + (Уд, - Ус )2 + (ZA, - zc )2 + ^в, +У в, +2в, + + 2[(с ^Су + S SS ^Sy)x'B. +S у/ С ^'в. +(S у/ S ЗСу - С у/ S/)z'B. + 2 (S ^С ^ Sy - S у/ Су)х'В/ +С у/ С .9/в. +(S у/ Sy + С у/ S 3Cy)z'B. + 2 Сi9Syv'B. -Si9y'B;. +С 3Cyz'B. ^zc - zA,), Z = 1 ...6,
№
~*А,) + "Уа,)+
где для сокращения записи введены обозначения: S у/ = sin у/, Су/ = cosy/ и т. д.
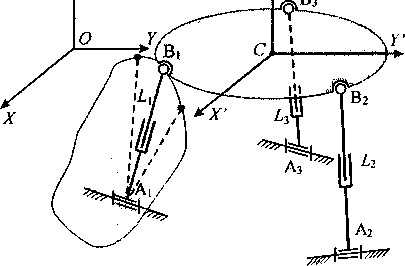
Пусть необходимо составить математическую модель для механизма, показанного на рис. 2. Количество степеней свободы этого механизма Я = 6(8-1)-3-3-5-6 = 3. Следовательно, пространственная ориентация платформы должна описываться тремя обобщенными координатами.
Примем, что обобщенными координатами являются длины штанг L,, выходными будем считать координаты сферических шарниров В, в неподвижной системе координат OXYZ. Запишем уравнения, связывающие обобщенные и выходные координаты:
А2 = (^А, - *в, )2 + (Уа, - Ув, )2 + Оа, - ^В, )2, Z = 1 ...3. (4)
В уравнения (4) входят 9 координат сферических шарниров, следовательно эти уравнения должны быть дополнены 6 уравнениями связи. Однако для рассматриваемого механизма можно записать только три уравнения, аналогичные (2):
Ав, — хВ2) +(Ув, — Ув2) + AB] — гв2) = |В1Вг| >
Ав2 - ^в3 )2 + (Ув2 - Ув3 )2 + (гв2 - ZB3 )2 = |В2В3 Г ; (5)
(хВ] -ХВз)2 +(уВ] -Ув3) + Abj -ZB3)2 = |В1Вз| ■
Остальные уравнения связи должны быть записаны из каких-то иных условий, например, учитывающих, что точки В, - центры соответствующих шарниров, лежат в заданных плоскостях.
На рис. 2 показана плоскость, в которой лежит 7 .7- точка В,. Данная плоскость проходит через штангу Д перпендикулярно прямой, являющейся осью вращения шарнира Aj. Если ось вращения шарнира Aj задана уравнением
^-^а, = У~УА1 = ^-^а,
А, ^А! «А1 ’ где ZA], mkx, n^x - направляющие косинусы в системе координат OXYZ, то уравнение плоскости, перпендикулярной этой прямой и проходящей через точку В], будет иметь вид [8]
А, (^-^В1) + тА,(У-Ув1) + ИА1(2-гВ1) = °-
Так как эта плоскость проходит через точку пересечения штанги 1^ с осью вращения шар нира А! (точку А!), то можно записать дополнительное уравнение связи
Расчет и конструирование
кх 0А1 " хв,) + тА, (Уа, ~ Ув,) + «А1 (гА1 - 2В1) = 0.
Аналогично для остальных штанг:
za2 Оа2 - ^в2) + '«А, (Уа2 ~ Ув2) + «а2 (^а2 - ^в2) = 0;
ZA3 (ХА3 - ^Вз ) + WA3 <Уа3 ~ Ув3 ) + «Аз (ZA3 ~ ^В3 ) = °'
Оси вращения цилиндрических шарниров обычно лежат в плоскостях, параллельных плоскости ОХУ . В этом случае иА) = пКг = лАз = 0 и дополнительные уравнения связи несколько упростятся:
кх (ха, " ^в.) + т^ (Уа, - Ув,) = о;
к2 (ха2 - *в2) + wa2 (Уа2 - Ув2) = о; (6)
к3 0% ~ *в3) + ^Аз <Уа3 - Ув3) = 0 •
Совместное решение девяти уравнений (4)—(6) позволит определить выходные координаты по известным обобщенным координатам, т. е. решить прямую задачу о положениях.
При решении обратной задачи о положениях необходимо задать три выходные координаты и с использованием уравнений (4)-(6) определить обобщенные координаты - длины штанг L,.
Если при функционировании механизма представляет интерес пространственное положение его платформы, то в качестве выходных координат целесообразно использовать координаты полюса С в системе координат OXYZ и три угловые координаты, характеризующие поворот платформы вокруг полюса - углы Крылова. В этом случае для решения задач о положениях потребуется совместно решать шесть уравнений - по числу выходных координат механизма:
к1 = (^А, - ^'в, Чу'в, Ч^'в, ~хс )2 + (уА, - «^'в, -«ЧУв, -т^кх -Ус У +
+ (^ - «1^В1 "«гУв, -«з^'в, -zc У;
-
-^2 = (ХА2 ~ЛХ*В2 ~кУв2 “Z3Z'b2 ~Хс) +(Уа2 ~т1Х'в2 -т2У в2-тз2'вг -Ус) +
+ (zA2 -п1х’в2 -и2Ув2 -w3z'b2 -zc)2;
к2 = (ха3 -^^Вз-^У'вз^з^Вз-^с)2 +(Уа3 -^’вз-^Увз-^з^Вз-Ус)2 + ^
+ (2д3 -И,*^ -И2У*Вз -И32'в3-2сУ;
-
к, (ха, ~ А^*В| ЧУв, Ч^'в, ~хс)+ "% (уа, - «^Ч -«ЧУвх -«Vb, -Ус)= °;
к2 (ха2 - Ах'в2 ЛУв, 4z'b2 ~хс )+ тКг (уА2 - Щ,УВ2 -/и2Ув2 -«^'b2 "Ус )=°;
кз (ХА3 - ккз -^У'вз ^З^В, ~ХС )+ тА3 (Уа3 - ^^'вз -т1Ув3 "«^В, ~УС)=^-
Уравнения (7) получены из (4) и (6) с использованием (3). Уравнения (5) исключены из рассмотрения, так как при подстановке в них координат сферических шарниров, рассчитанных с использованием (3), они превращаются в тождества.
Из шести выходных координат только три являются независимыми. Принять, какие из выходных координат использовать в качестве независимых, т. е. для каких координат задавать значения при решении обратной задачи о положениях, зачастую можно только по результатам численного решения прямой задачи для различных значений обобщенных координат.
Покажем, как могут быть решены прямая и обратная задачи о положениях для рассматриваемого механизма с использованием кватернионов.
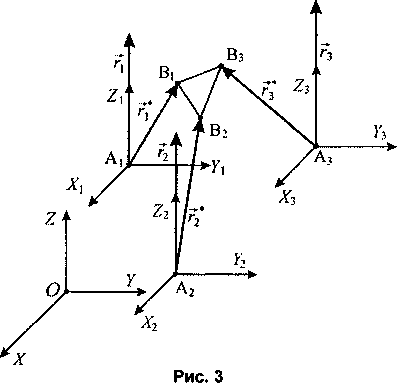
Введем в рассмотрение систему координат AxXxYxZx , оси которой сонаправлены соответствующим осям системы координат OXYZ, и вектор гх, начало которого совпадает с точкой А, (рис. 3), а координаты равны гхх = 0, гху = 0, rX7=Lx. Очевидно, что вектор гх соответствует вертикальному положению штанги Lx . Положению этой штанги при работе механизма соответствует вектор гх . С использованием математического аппарата кватернионов [7] переход от вектора гх к вектору г* можно записать как
П*=А1о^оЛ1,
Смирнов В.А., Федоров В.Б. Использование кватернионов при математическом
______________________________________________ моделировании механизмов с параллельными... где Aj - нормированный кватернион, заданный в системе координат AxXxYxZx ; Л] - кватернион, сопряженный с Л!; ° - символ операции умножения кватернионов.
Координаты точки В] конца вектора гх определяются следующим образом:
*В1
/в1?
= A,o^oA1+ уА)
/А1 7
Аналогично могут быть получены координаты точек В2 и В3.
Кватернион Л как гиперкомплексное число записывается в следующей форме:
Л — Ху + ixX^ + /2^ "*" ^3^3 ’ СО
где Х3 - действительные числа; i3 - мнимые
единицы. Для нормированного кватерниона ^+^2+^+^=1. (10)
Кватернион Л, сопряженный с Л, записывается как

(И)
Применительно к задаче описания вращения твердого тела, имеющего закрепленную точку, мнимые единицы ij трактуются как орты некоторой прямоугольной системы координат. При таком подходе параметры Х} определяют направление оси поворота твердого тела в системе координат, задаваемой ортами ; параметр Ху характеризует угол <9* поворота тела вокруг этой оси: Ху = cos.9*/2.
Примем, что для кватерниона Л, орты / сонаправлены осям системы координат АхXxYxZx. С учетом (9) и (11) и свойств кватернионов [7] распишем преобразование (8):
^Bj = (Ли + Ai ~Ai — Ai) ‘4% "*"2(AiAi ~ Ал Ли)" Чу + 2(AiAi + А1А1)"4z + -^А] ’ УВ] = 2(AiAi + AiAi)'4x + (Ai + ^i ”'^i 1 ~ Asi)'rir + 2(Я21Я31 - ХохХхх) • rlz + уА]; zB1 = 2(ЛПЯ31 -ЛнА1)-Ч.у + 2(Х21Хзх + АлА1)'Чу + (Ло1 + Ai ~Ххх - Ai)‘4z + zA).
Так как г1У = г1У = 0, rxz = Д и Х^ = 0, полученные выражения существенно упрощаются:
Хв1 ~2AiAiA +xAi; уВ) -уА] 2XoxXxlLx; zBi -(2ХуХ 1)Д + zA].
Условие ХзХ = 0 следует из того, что любое положение штанги можно рассматривать как поворот в шарнире А, из исходного вертикального положения на угол 3* вокруг оси, лежащей в плоскости XxAxYx . Причем ориентация этой оси в плоскости задана, что устанавливает связь между компонентами кватерниона: Ai = kxXxx, kx = mAJlAx . Выражение для координаты zB] записано с использованием условия (10) нормирования кватерниона.
Для определения параметров кватернионов запишем с использованием (12) уравнения вида (^в, ~^ву)2 +Ов, -Ув7)2 + (^в, ~гв,)2 = |вув/|2 :
(2АА2А2А + ха2 ~2kxXyXXvxLx -хА|) + (2XoxXxxLx -уА(-2Х02Хх2£2 + уА^ +
+ {2^2 -1К +zAi -[2^ -1]Д -zj2 -|В2В,|2;
Расчет и конструирование
Р^Аз^-^ 2^1Я01Я1]21 xAJ +12^^^-Ул,"24ti + Уа3 / + ^
+ ([24 _ Фз + za3 “ |?4 _ ~ za, ) ~ М1 >
(2^442 + ха2 — 2к3Лоз Аз^з — ха3 ) + (244-^3 ~ Та3 —2444 + Та2) +
+ ^2^02 - 1^ + ZA2 “ ^4 - ^ - ZA3 ) ~ |В2В3| , где расстояния |ВуВ,| между шарнирами известны и при работе механизма не меняется.
Для определения величин Лщ, Лц, Л02, Л,2, Лу3, ^3 уравнения (13) должны быть дополнены уравнениями
4 + 4(i+^2)=i; 4+4d+42)=i; 4 + 4(i+^)=h (14)
следующими из условия (10) нормирования кватернионов. Из уравнений (14) можно записать:
1+V ’
1-4 .
1+£2 ’
1-4
что позволит уменьшить количество параметров кватернионов в (13) до трех:
2^9Лп7Л----4,+хА +2^,ЛП1Л--- ^-L -х
+ 2Л01
1 + fc 1
2^2р + к2 2 А2 1ЧПр + Л1
24 4 , 2 ^2 + У А р + к3
+ ([24 — 1]^2 + Z.
2^4 -хА
3^1 + к32 3 Аз ^р + к?^ А'
+ -2^0!
1 + ^2Z*
24 J 1 ,2 4+Та У 1 + «3
+ ([з Луз l]z,3 + zk
244 ■у । + ^2 4 + хд2 244

З-^А.
+ 2Лщ3
о А Уд 1 + £32
[24 1^3 ZA3) - |®2®з| ■
Знаки перед радикалами в (15) расставлены из анализа знаков координат сферических шарниров, получаемых с использованием преобразования (8).
Решение уравнений (15) позволяет при заданных обобщенных координатах L, определить параметры кватернионов и, далее, с помощью зависимостей (12) и аналогичных, записанных для других сферических шарниров, определить координаты этих шарниров. Тем самым решается прямая задача о положениях. Использование кватернионов позволило снизить количество совместно решаемых уравнений с девяти до трех. Численное решение уравнений (15) авторами выполнялось с использованием пакета MathCad.
Технологическое оборудование, построенное с использованием рассматриваемого механизма с параллельными кинематическими цепями, можно использовать для перемещения заготовки, установленной на его платформе, в вертикальной плоскости с поворотом ее относительно двух горизонтальных осей. Требуемые для этого перемещения платформы можно описать с помощью трех выходных координат: координаты zc полюса и двух углов Крылова (тангажа S крена у ).
Смирнов В.А., Федоров В.Б. Использование кватернионов при математическом
______________________________________________ моделировании механизмов с параллельными... Поэтому при решении обратной задачи целесообразно выбрать в качестве трех известных выходных координат механизма величины Zc, S и у .
Составим уравнения, позволяющие решить обратную задачу при принятых выходных координатах. С использованием третьего уравнения из (12) и аналогичных ему можно записать следующие выражения:
(2Лл — 1)7. + zA) = n^ Bj +и2у B] +n3z В) +zc ;
(2<1q2 —l)-^ + za2 nix в2 ^гУ в2+из2 в2 *zc ’ О 6)
(2^3 -1)^3 + ZA3 = ”1^'в3+й2Ув3+И3*В3 +ZC •
Направляющие косинусы, входящие в (16), определяются только углами & и у .
Из выражений (16) можно выразить длины штанг L,: пхх'йлп2у'ълп3г'йлгс-гк
Li ---- 1-----±2—Г------- ’ z "L-3- <17)
Подстановка (17) в (15) позволяет получить систему трех нелинейных уравнений, которая связывает три принятых независимых выходных координаты механизма с тремя неизвестными параметрами кватернионов Я^ , Л02, ^. Численное решение этой системы позволит, с последующим использованием (17), определить обобщенные координаты L, при заданных выходных координатах Zc, & и у, т. е. решить для рассматриваемого механизма обратную задачу о положениях. Как и в случае прямой задачи, при использовании кватернионов количество совместно решаемых уравнений снижено до трех.
Уравнения, полученные для решения задач о положениях, служат основой для численного решения задач о скоростях и ускорениях. Следовательно, гиперкомплексные числа кватернионы могут быть успешно использованы при моделировании механизмов с параллельными кинематическими цепями путем решения прямой и обратной задач кинематики.
Список литературы Использование кватернионов при математическом моделировании механизмов с параллельными кинематическими цепями
- Потапов В.А. Оборудование с параллельной кинематикой/В.А. Потапов//СТИН. -2003. -№3. -С. 35-40.
- Глазунов В.А. Пространственные механизмы параллельной структуры/В.А. Глазунов, А.Ш. Колискор, А. Ф. Крайнев. -М: Наука, 1991. -95 с.
- Обрабатывающее оборудование нового поколения. Концепция проектирования/В.Л. Афонин, А.Ф. Крайнев, В.Е. Ковалев и др.; под ред. В.Л. Афонина. -М.: Машиностроение, 2001. -256 с.
- Механика машин: учеб. пособие для втузов/И.И. Вульфсон, М.Л. Еpuxoв, М.З. Коловский и др.; под ред. ГА. Смирнова. -М.: Высш. шк., 1996. -511 с.
- Манипуляционные системы роботов/А.И. Корендясев, Б.Л. Саламандра, Л.И. Тывес и др.; под общ. ред. А.И. Корендясева. -М.: Машиностроение, 1989. -472 с.
- ГОСТ 20085-80. Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения.
- Бранец В.Н. Применение кватернионов в задачах ориентации твердого тела/В.Н. Бранец, И.П. Шмыглевский. -М: Наука, 1973. -320 с.
- Выгодский М.Я. Справочник по высшей математике/М.Я. Выгодский. -М.: Физматгиз, 1963. -872 с.
