Использование нейронной сети для обнаружения и идентификации помех при приеме шумоподобного сигнала

Автор: Бельков С.А., Малыгин И.В.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 2 т.22, 2019 года.
Бесплатный доступ
Основной задачей системы связи является своевременная надежная и достоверная передача сообщений между абонентами. В случае воздействия помех система связи выполняет свою задачу в соответствии с той помехозащищенностью, которой она обладает. В то же время смесь полезного сигнала, шума и помех, поступающая на вход приемника, после необходимой обработки может служить источником информации о существующих в канале помехах. Полученная таким образом информация о наличии и характере помех может быть полезна как для изменения параметров радиоканала (модуляции, частоты, режима), так и для внешнего заказчика. Настоящая статья посвящена использованию нейронных сетей для извлечения из поврежденных информационных сигналов информации о характере помех, вызвавших такое повреждение.
М-последовательность, шумоподобный сигнал, узкополосная помеха, широкополосная система связи, нейронная сеть
Короткий адрес: https://sciup.org/140256090
IDR: 140256090 | УДК: 621.396 | DOI: 10.18469/1810-3189.2019.22.2.37-43
Use of the neural network for detection and identification of interference when receiving a spread spectrum signal
The main task of the communication system is timely reliable and reliable transmission of messages between subscribers. In the event of interference, the communication system performs its task in accordance with the noise immunity it possesses. At the same time, the mixture of the useful signal, noise and interference, which comes to the receiver input, after the necessary processing, can serve as a source of information on the existing interference in the channel. Information on the presence and nature of interference thus obtained may be useful both for changing the parameters of the radio channel (modulation, frequency, mode) and for an external customer. This article is devoted to the use of neural networks to extract information from the damaged information signals about the nature of the interference that caused such damage.
Текст научной статьи Использование нейронной сети для обнаружения и идентификации помех при приеме шумоподобного сигнала
Введение Далее разность числа совпавших разрядов и
Шумоподобный полезный сигнал, излучаемый передатчиком, воспринимается приемником и обрабатывается с помощью аналоговоцифрового преобразователя (АЦП). Рассмотрим процесс более подробно. Обозначим каждый отдельный разряд М-последовательности, наблюдаемой на выходе АЦП, через X i , i = 1, N , где N – длина М-последовательности. На приемной стороне имеется также некоторая эталонная М-последовательность (образец), с которой принятые М-последовательности сравниваются. На основании сравнения принимается решение: была принята правильная М-последовательность или ошибочная.
Одним из методов принятия такого решения является использование автокорреляционной функции (АКФ) [1]. При этом, сравнивая поразрядно принятую и эталонную М-последова-тельность, получаем возможность отследить некоторые характеристики приема.
Так для каждого разряда xi можно обнаружить факт его совпадения или несовпадения с разрядом ei эталонной М-последовательности. Количество совпадающих разрядов обозначим Ny (уes), количество несовпадающих разрядов — N n (no). Очевидно, что N y + N n = N .
числа несовпавших разрядов сравнивается с некоторым заданным порогом P , т. е. для того, чтобы принятая М-последовательность была правильной, необходимо выполнение условия
N y — N n > P, (1)
где P = Np — уровень порога в интервале [0,1].
Проверка условия выше требует вычисления двух сумм. С точки зрения аппаратно-программной реализации можно упростить алгоритм проверки: достаточно считать только число совпадающих или только число несовпадающих разрядов. Действительно, с учетом условия (1) и того, что N y + N n = N , получаем следующие два условия:
N y > ( 1 + P ) N (2)
N n > ( 1 - P ) -. (3)
Так например для М-последовательности длиной 127 и порога p = 0.5 находим, что для того, чтобы считать принятую М-последовательность правильной, достаточно совпадения в 96 разрядах (с округлением до целых), либо число ошибочных разрядов не должно быть больше чем 31. Таким образом, для принятия решения о правильности приема М-последовательности доста
Число ошибок в
М-последовательности
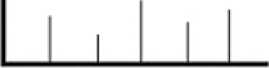
Номер М-последовательности за период наблюдения Тп
Рис. 1. График числа ошибок в принятых М-последователь-ностях точно, например, подсчитать число ошибочных разрядов. С точки зрения аппаратно-программной реализации функции это дает выигрыш в количестве необходимых сумматоров.
Уже здесь возможно также применение нейронной сети в следующих двух случаях:
– при работе с аналоговыми сигналами до или внутри АЦП, однако это требует нетрадиционного подхода к проектированию АЦП;
– после АЦП для анализа качества приходящих М-последовательностей вместо АКФ используется нейронная сеть, такая возможность рассматривалась в [2; 3].
Расширим далее нашу модель введением некоторого периода наблюдения Tn (например, 1000 подряд принимаемых последовательностей) за поведением групп принимаемых М-последова-тельностей. Для группы последовательностей можем получить ряд дополнительных статистических характеристик. Для отдельной М-последо-вательности можем получить количество разрядов, в которых произошло несовпадение с эталоном. А поскольку число рассматриваемых М-последовательностей равно Tn , то для всего периода наблюдения получаем график изменения количества ошибок во времени (рис. 1), некий аналог «скользящих» графиков, для которых можно получать и другие характеристики, например линию скользящей средней.
От М-последовательности в целом можно перейти к более подробным статистическим характеристикам, например, для каждого разряда М-последовательности можно получить за период Tn количество ni несовпадений в этом разряде. Отсюда, соответственно, можем получить частоту несовпадения fn , i для i -го разряда.
Таким образом, имеем следующие статистические характеристики.
Скользящая частота несовпадений в i -м разряде:
f == n / Tu.(4)
n,
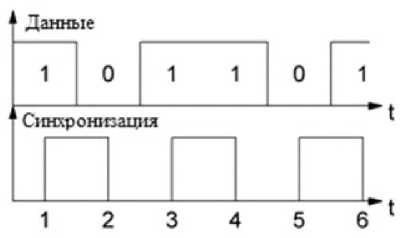
Рис. 2. Организация передачи данных
Скользящая частота совпадений в i -м разряде:
f y , i
_ yi _ Tn
~ гр ~ гр - 1 fn , i .
TnTn
Как уже отмечено, эти частотные характеристики являются динамическими, т. е. они формируются в изменяющемся времени (происходит смещение периода наблюдения вдоль временной оси). Поэтому даже при постоянном Tn частоты несовпадения или совпадения являются также функциями времени: fn , i ( t ), fy , i ( t ). Поэтому по каждому разряду можно еще получить график изменения частот за время периода Tn , который не всегда будет линейным (по сути дела, это некоторые скользящие средние с заданным периодом).
Поскольку частота передачи М-последователь-ностей в системах связи достаточно высока (порядка МГц), то подсчет числа совпадений и несовпадений (и соответствующих им частот) должен происходить достаточно быстро, чтобы не выходить за пределы возможностей аппаратуры приемного тракта.
Таким образом, сбор статистических характеристик позволяет нам получить матрицу числа ошибок, в столбцах которой представлены отдельные М-последовательности, обозначенные их номером в периоде наблюдения Tn , а номер строки соответствует номеру разряда М-последо-вательности. Суммирование для отдельной М-по-следовательности числа ошибок по всем разрядам дает также вектор ошибок по М-после-довательностям внутри периода наблюдения Tn .
Возникающие в процессе сеанса связи помехи могут иметь различную природу: импульсные, квазигармонические, флюктуационные (в виде белого шума) [4; 6; 7] и т. д. Влияние этих помех отражается на качестве приема М-последовательностей, увеличивая число ошибок в них. Можно утверждать, что в принятых М-последовательностях остаются следы действия помех того или иного вида. Предполагается, что для каждого вида помех форма этих следов разная. Какая именно, можно установить в эксперименте, примерная схема которого представлена на рис. 2. Распознать их вид можно при помощи нейронной сети. Полученный вектор числа ошибок в М-последовательностях можно подать на входы нейросети, а на выходе ее получать как минимум тип действующей помехи. Учет числа ошибок по отдельным разрядам может помочь получить и более точные способы распознавания.
1. Пример нейронной сети
Чтобы описать работу нейронной сети, необходимо понять, как работает отдельный нейрон [4; 5]. Если m-размерный входной вектор подается на вход нейрона, то работу нейрона можно представить функцией g (x)> xWT + b, (6) где W – вектор весов, который соответствует множеству входов; b – некоторый свободный член [10]
Очевидно, результат этого действия есть некоторое число. В реализации функции нейрона есть линейная часть, описанная выше (операции сложения и умножения векторов являются линейными) и нелинейная часть, представленная решающей функцией f ( g ( x ) ) .
Нейронная сеть представляет собой некоторую структуру из нескольких отдельных нейронов, работа которых показана выше. Все операции для вычисления значения выхода нейронной сети могут быть записаны в матричной форме, чтобы все вычисления выполнялись эффективно [5]. В соответствии с теоремой аппроксимации нейронная сеть способна реализовать более сложные функции, чем отдельный нейрон [8; 13; 16].
В процессе обучения нейронной сети ей представляются обучающие примеры. Значения выходов нейронной сети рассчитывается с учетом этих примеров, и затем используется также функционал качества нейронной сети. Использование обучающей информации позволяет изменить веса нейронной сети таким образом, чтобы обеспечить требуемое качество работы нейронной сети [16].
В качестве структуры нейронной сети предполагается использовать многослойный персептрон [5], имеющий один входной, один или несколько скрытых и один выходной слой. На вход каждого нейрона входного слоя поступают раз-
ряды М-последовательности xi . Для внутренних слоев в обозначении yj ( n ) верхний индекс – номер слоя, а нижний – номер нейрона в этом слое. Число k нейронов в разных слоях может отличаться. Весовой коэффициент синапсиче-ской связи, соединяющий i -й нейрон слоя n - 1 c j -м нейроном слоя n обозначим через wij .
Работа многослойного персептрона описывается следующей формулой:
( n ) yj
( k n - 1
= f z w n y ( n - 1 )- P i
V i = 1
где f – функция активации нейрона (для многослойного персептрона обычно применяются гладкие нелинейные функции активации, например гиперболический тангенс); Pj – пороговый уровень j -го нейрона в слое n .
Полезны также такие показатели, как среднеквадратичная ошибка обучения и среднеквадратичная ошибка обобщения:
El =
E T =
Q L K n - ^
Q T K n - 1
QL
k
n
Ln z zyin’j -dj ,
Q T ( kn. .
z z У " 1 ’ - d i ,
n
где QL – количество элементов обучающей выборки; QT – количество элементов тестовой выборки; Kn – число нейронов в выходном слое (n)j сети; yi – значение нейрона в выходном слое с номером i в выходном слое n, вычисленное для j-го элемента выборки; dij – значение нейрона с номером i в выходном слое n, вычисленное для j-го элемента выборки.
2. Влияние помех
Воздействие помехи приводит к тому, что в принимаемом сигнале изменяются его характеристики. Рассмотрим несколько типичных случаев [9].
Гармоническая помеха. На входе селективного тракта приемника действует аддитивная смесь сигнала и гармонической помехи:
U ( t ) = As cos ( to st + 9 s ) + A p cos ( to p t + 9 p ) , (10)
где A , to и 9 — амплитуда, частота и фаза; индексы s и p соответствуют сигналу и помехе.
На выходе селективного тракта получаем:
A o = V A 2 + A po + 2 A so A po cos ( Ato t ) , (11)
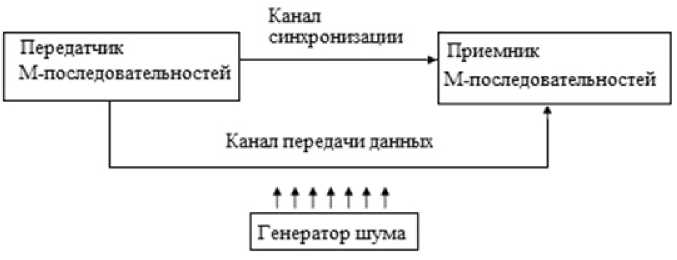
Рис. 3. Схема эксперимента по обнаружению помех
где Ato = | to s -to p — разность частот сигнала и помехи; индекс o соответствует выходу.
Фаза выходного сигнала изменяется следую- щим образом:
A po sin (Ato t ) Ф ( t ) = arctg------------------.------.
A so + A po cos ( Ato t )
Импульсная помеха. Возникает в виде случайных импульсов. Соответственно, амплитуда помехи есть функция времени:
A o = V A so + A po ( t ) + 2 A so A po ( t ) cos ( 6 ) . (13)
Изменение фазы сигнала на выходе зависит от фазы помехи:
Ф ( t ) = arctg
A po ( t )sin( 6 )
A so + A po ( t )cos( 6 )
Флюктуационная помеха. Часто представлена так называемым «белым шумом». При этом узкополосный случайный процесс записывается в виде
U n ( t ) = U n ( t )cos ( to o t -ф ( t ) ) , (15)
где U n ( t ) — случайная огибающая; ф ( t ) — случайная фаза узкополосного колебания; индекс n соответствует шуму.
Распределение вероятностей мгновенного значения шумового напряжения Un подчиняется нормальному закону:
2 n 2
P ( U n ) = -_= e 20 n , (16)
V 2non
3. Техническая реализация
где o n — дисперсия шума.
Распределение огибающей шума подчиняется закону Релея:
2 n 2
P ( U n ) = -n e 2 o n . (17)
o n
Таким образом, можно отметить, что различные виды помех по-разному действуют на выходной сигнал, что закладывает основу для возможности распознавания типа помех.
Экспериментальная система связи состоит из передатчика и приемника сигнала [11; 12]. Используются платы Arduino Nano на основе микроконтроллера ATMega328p. Связь между передатчиком и приемником (рис. 2) осуществляется через синхронный интерфейс на частоте 20 кГц. Раз в секунду передатчик генерирует предварительно записанную М-последовательность на одном из своих выходных портов, сопровождая ее импульсами синхронизации (рис. 3). Приемник проверяет состояние ввода и сохраняет полученную битовую последовательность в память. Далее компьютер через адаптер uart-usb считывает ее терминальной программой для последующей обработки с помощью нейронной сети. В этом случае импульсы синхронизации передаются по проводам, а передаваемые последовательности - по радиоканалу [14; 15; 17].
Для тестирования были использованы M-последовательности длиной 31 бит.
Эталонной последовательностью была следующая:
Сравнение полученных M-последовательностей с эталонной дает следующие результаты (представлены только типичные М-последовательности): 1110010001010111101101001100000
N - N = 31 - 0 = 31 result = 1
yn
N - N = 30 - 1 = 29 result = 0.9354839 yn
N„ - N = 29 - 2 = 27 result = 0.8709677 yn
N„ - N = 17 - 14 = 3 result = 0.09677419 yn
N„ - N = 16 - 15 = 1 result = 0.03225806
yn
N - N = 13 - 18 = - 5 result = —0.16122903
yn
N - N = 15 - 16 = - 1 result = —0.03225806
yn
Полученные данные показывают, что нейронная сеть может быть реализована и обучена так, чтобы распознавать помехи, которые присутствовали в передающем канале, и определять характеристики достоверности полученных М-последовательностей не хуже, чем АКФ. Следующим шагом может быть использование нейронной сети для анализа следов помех в отклике приемо-передающего тракта, т. е. в совокупности получаемых в результате сбора статистики графиков скользящих частот числа правильно принятых или ошибочных разрядов.
Заключение
В процессе выполненных исследований получены следующие результаты:
-
1. Рассмотрена возможность применения нейронной сети для обнаружения шумоподобного сигнала.
-
2. Определены некоторые статистические параметры принимаемых М-последовательностей, и предложен механизм их формализации.
-
3. На основании предложенной схемы эксперимента показана возможность обнаружения и идентификации действующих на систему связи помех в процессе передачи сообщения.
-
4. Рассмотрены технические вопросы, связанные с постановкой и реализацией эксперимента.
Список литературы Использование нейронной сети для обнаружения и идентификации помех при приеме шумоподобного сигнала
- Варакин Л.Е. Системы связи связи с шумоподобными сигналами. М.: Радио и связь, 1985. 384 с.
- Radio signal detection using machine-learning approach / I.V. Malygin [et al.] // Proc. CEUR Workshop. 2017. P. 57-61.
- Морозов О.А., Овчинников П.Е. Обнаружение фазоманипулированных сигналов при помощи искусственных нейронных сетей // Труды Российского научно-технического общества радиотехники, электроники и связи имени А.С. Попова. Серия: Цифровая обработка сигналов и ее применение. Выпуск: X-2. М., 2008. С. 677-679.
- Neural network based C/N0 abnormity detection method for GPS anti-spoofing / L. He [et al.] // Proc. ITM. 2016. P. 716-725. DOI: 10.33012/2016.13454
- Матвеев М.Г., Копытин А.В., Сирота Е.А. Комбинированный метод идентификации параметров распределенной динамической модели // Сборник трудов IV Международной конференции и молодежной школы «Информационные технологии и нанотехнологии» (ИТНТ-2018). Самара: Новая техника, 2018. С. 1651-1657.
- Гарькина И.А., Данилов А.М., Дулатов Р.Л. Идентификация помех, не коррелированных с входным сигналом // Современные проблемы науки и образования. 2015. № 1-1. URL: http://www.science-education.ru/ru/article/view?id=17837 (дата обращения: 08.03.2019).
- Осипов Н.А., Шавин А.С., Тарасов А.Г. Методика идентификации помех, действующих в канале передачи информации робототехнических систем // Труды МАИ. 2014. № 94. С. 18-25.
- Бархатов В.А. Обнаружение сигналов и их классификация с помощью распознавания образов // Дефектоскопия. 2006. № 4. С. 14-27.
- Никитин Н.П., Лузин В.И. Устройства приема и обработки сигналов. Системы управления приемником. Устройства борьбы с помехами: уч. пос. / науч. ред. В.И. Гадзиковский. Екатеринбург: Изд-во Урал. ун-та, 2014. 88 с.
- Ефимов Е.Н., Шевгунов Т.Я. Формирование оценки направления прихода сигнала с использованием искусственных нейронных сетей // Труды МАИ. 2015. № 82. С. 28-33.
- Barker R.H. Group synchronizing of binary digital sequences // Communication theory. London: Butterworth. 1953. P. 273-287.
- Forney G. Generalized minimum distance decoding // IEEE Transactions on Information Theory. 1966. Vol. 12. P. 125-131.
- DOI: 10.1109/TIT.1966.1053873
- Rüschendorf L. The Wasserstein distance and approximation theorems // Zeitschrift für Wahrscheinlichkeitstheorie und verwandte Gebiete. 1985. Vol. 70. P. 117-129.
- DOI: 10.1007/BF00532240
- Welch L. Lower bounds on the maximum cross correlation of signals // IEEE Transactions on Information Theory. 1974. Vol. 20. P. 397-399.
- DOI: 10.1109/TIT.1974.1055219
- Amari S. Backpropagation and stochastic gradient descent method // Neurocomputing. 1993. Vol. 5. P. 185-196. (93)90006-O.
- DOI: 10.1016/0925-2312
- Chen T., Chen H. Universal approximation to nonlinear operators by neural networks with arbitrary activation functions and its application to dynamical systems // IEEE Transactions on Neural Networks. 1995. Vol. 6. P. 911-917.
- DOI: 10.1109/72.392253
- Shore J., Johnson R. Axiomatic derivation of the principle of maximum entropy and the principle of minimum cross-entropy // IEEE Transactions on Information Theory. 1980. Vol. 26. P. 26-37.
