Использование средств информационных технологий для изучения моделей нелинейной динамики

Автор: Никифорова Ирина Владимировна
Журнал: Образовательные технологии и общество @journal-ifets
Статья в выпуске: 4 т.22, 2019 года.
Бесплатный доступ
В работе рассматривается роль средств информационных технологий в формировании профессиональных компетенций у студентов направления подготовки «Прикладная математика и информатика» при изучении дисциплины «Качественные методы нелинейной динамики». Современному специалисту необходимо владеть методами математического и компьютерного моделирования для успешного осуществления профессиональной деятельности, а средством взаимосвязи математической и компьютерной модели являются именно инструменты информационных технологий. В качестве примера описываются результаты численного моделирования динамики виброударного механизма с кривошипно-шатунным возбудителем колебаний, который представляет собой существенно нелинейную системы с переменной структурой. Исследование проводилось с помощью программного комплекса, разработанного в среде Borland Developer Studio 2006.
Информационные технологии, нелинейная динамика, компьютерное моделирование, математическое моделирование, обучение студентов
Короткий адрес: https://sciup.org/140245490
IDR: 140245490
Текст научной статьи Использование средств информационных технологий для изучения моделей нелинейной динамики
Потребность общества в высококвалифицированных специалистах, способных решать задачи различной сложности, адаптироваться к изменяющимся условиям, готовых к саморазвитию и самообучению, повлекла за собой изменения в образовательной системе. Требования, предъявляемые к выпускникам вузов, изложены в Федеральном государственном образовательном стандарте (ФГОС), построенном на компетентностном подходе [1,2]. Среди требований следует выделить способность приобретать новые научные и профессиональные знания с использованием современных образовательных и информационных технологий (ИТ) [3-8], способность собирать, обрабатывать и интерпретировать данные современных научных исследований, необходимые для формирования выводов по соответствующим научным исследованиям. Таким образом, для достижения поставленных обществом и государством целей обучения, выражающихся в формировании необходимых компетенций, перечисленных выше, нужно организовать учебный процесс на основе адекватного целям содержания образования, широкого использования средств ИТ, реализации межпредметных связей учебных дисциплин [9]. Инструментом интеграции в процессе обучения математическим дисциплинам студентов, обучающихся по направлению подготовки «Прикладная математика и информатика», может служить математическое и компьютерное моделирование [1013]. Средства ИТ позволяют преобразовать математическую модель в компьютерную при наличии формального описания первой. ИТ представляют широкие возможности визуализации результатов моделирования, такие как построение графиков, диаграмм и т.п. Вопросу использования средств ИТ в образовательном процессе и научноисследовательской работе посвящено много работ [5-8].
Читаемая студентам бакалавриата, обучающимся по направлению подготовки «Прикладная математика и информатика», дисциплина «Качественные методы нелинейной динамики» как раз решает задачи формирования компетенций, связанных с выполнением фундаментальных и прикладных работ поискового, теоретического и экспериментального характера
В качестве примера использования ИТ в исследовательской работе приводится математическая модель виброударного механизма с кривошипношатунным возбудителем колебаний (КШВК), численное исследование которого проведено с помощью программного комплекса, разработанного в среде Borland C++ Builder 6.
Описание курса «Качественные методы нелинейной динамики»
Дисциплина «Качественные методы нелинейной динамики» относится к дисциплинам специализации, лекционным курсам по выбору студентов, специализирующихся в области прикладной математики, нелинейной динамики, математического моделирования.
Цели и задачи дисциплины «Качественные методы нелинейной динамики» состоят в том, чтобы
-
- ознакомить студентов с основными понятиями и современными методами нелинейной динамики и приемами исследования нелинейных динамических систем;
-
- привить студентам практические навыки математического моделирования процессов нелинейной динамики на основе качественно-численных методов исследования с применением компьютера, необходимые для решения конкретных прикладных задач нелинейной динамики.
Дисциплина «Качественные методы нелинейной динамики» изучается в 5 семестре. Изучаемый в рамках дисциплины теоретический и практический материал опирается на базовые знания, полученные обучающимися в результате освоения таких дисциплин как «Математический анализ», «Дифференциальные уравнения», «Численные методы».
Полученные в результате освоения данной дисциплины знания и навыки могут быть непосредственно применены обучающимися в их будущей профессиональной деятельности, а при продолжении ими обучения в магистратуре являются частью базовых знаний по дисциплинам, связанным с применением математических методов и компьютерного моделирования, при решении задач математического прогнозирования, системного анализа и оптимизации.
Анализ различных источников, посвященных компьютерному моделированию, позволяет выделить несколько классов средств компьютерного моделирования для исследования математических моделей в зависимости от их функционала [9]
-
- языки и системы программирования (C++, Object Pascal и т.д.);
-
- математические пакеты аналитических и символьных преобразований (MathLab, Maple и т.д.);
-
- специализированные программы для исследования моделей (Ansys, AutoCad и т.д.).
Для исследования задач нелинейной динамики студентам предлагается в качестве средств ИТ написать собственную программу на языке программирования или воспользоваться одним из математических пакетов. Специализированные программы исследования моделей в данном случае не подходят, поскольку ориентированы на выполнение расчетов для других классов задач.
В качестве примера в работе приводится математического и компьютерного моделирование динамики виброударного механизма с КШВК [14,15].
Пример использования средств ИТ
Работу рассматриваемых вибрационных механизмов можно описать следующим образом (рис.1): вращательное движение с постоянной частотой ® вала основной массы механизма с помощью кривошипно-шатунного устройства преобразуется в возвратно-поступательное движение основной массы М относительно шабота. При этом ползуны-ударники попеременно наносят удары по h соответствующим наковальням высоты i и, создаваемое таким образом ударновибрационное воздействие передается непосредственно через шабот обрабатываемой среде. Благодаря выбору величин сдвига по фазе ^i между кривошипами, эксцентриситетов ri , высот наковален может быть обеспечено требуемое (может быть оптимальное в некотором смысле) ударное взаимодействие ползунов-ударников о шабот, при котором ползуны-ударники (ПУ) имеют максимальную скорость, обеспечивая устойчивость периодического режима работы. Следует отметить, что наличие в рассматриваемых механизмах нескольких ПУ создает условия к возникновению в простейших режимах движения в одном его цикле N ударов ПУ об обрабатываемую среду, что с одной стороны, как известно, должно способствовать более эффективному процессу пластического деформирования обрабатываемой среде, а с другой – несколько затрудняет процесс настройки механизма на этот эффективный режим движения и поэтому требует детальное предварительное математическое изучении его нелинейной динамики. Уравнения движения механизмов при ряде ограничений могут быть записаны в виде
X = - p , x > f ( т ),
5c + =- RX - + (1 + R ) df ^ )-, x = f ( т ). d T
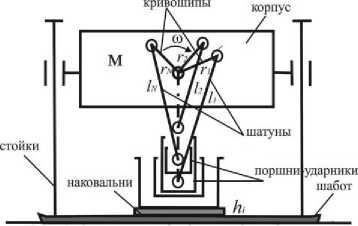
Рис. 1. Схема виброударного механизма с КШВК с произвольным числом поршней-ударников с неподвижным ограничителем где x, т - безразмерные координата центра масс и время соответственно, 0 < R < 1 -коэффициент восстановления скорости при ударе поршня о неподвижный ограничитель, моделирующий среду, f (т ) = max{f(т), f2(т ),...,fN (т)} - т цилиндрическая поверхность, ограничивающая движение фазовой точки в трехмерном фазовом пространстве. Фазовое пространство системы (1) в координатах x, x, т усечено по x , причем x > f(т), x < +«.Все фазовые траектории располагаются либо на поверхности S(x = f (т)), либо выше ее, представляющую собой как N пересекающихся поверхностей x = f(т) (i=1,2,...,N). Случай x. > f (т) соответствует свободному движению механизма, а x = f (т) - ударному взаимодействию одного из ПУ с ограничителем.
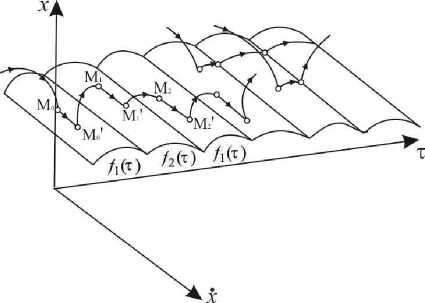
Рис.2. Качественный вид фазового пространства для двухпоршневого виброударного механизма с кривошипно-шатунным возбудителем колебаний
Исследование динамики механизма, описываемого дифференциальными уравнениями (1), (2), проведено, как и в [14], с помощью метода точечного преобразования [16]. За секущую поверхность выберем поверхность S.
Пусть
M о( т = т о , х = f 1( т о ), x = x о ) е S i( х = f 1( т )),
M 1 ( т = т 1 , x = f 2 ( т 1 ), x = ;c i ) е S 2( x = f 2 ( т )),
M2 (т = т2, x = f (т ),-x = ^x2 ) е S], - три последовательные точки, принадлежащие поверхности x = f (т) , тогда преобразование T = T^T точек TT
Мо-- 1—> M]-- 2—> M2 можно записать в виде
- цу cos(r 1 - ф") = - цХ 1(cos т 1 - cos t 0 ) - ( т 1 - т 0)( цХ 1 sin т 0 + цуХ 2 sin( T 0 - фУ) - (3)
T 1 1
- цуХ 2 (cos( t - ф ) - cos( t 0
- Ф» - Р ( Т 1 Т 0 ) + 51 о ( т 1
- т 0 ) + £ - ц cos t 0 ;
x 1 = - R ( цХ 1(sin т 1 - sin т 0 ) + цyХ 2(sin( т 1 - ф ) - sin( T 0 - ф )) - p ( т 1 - т 0 ) + x 0) +
+ (1 + R ) цу sin( T 1 - ф );
£ - ц cos t 2 =- цХ 1(cos т 2 - cos T 1 ) - ( т 2 - т 1 )( цХ 1 sin т 1 + цуХ 2 sin( T 1 - ф )) -
T 2 1
- цуХ 2 (cos( t 2
- ф ) - cos( t - ф )) - Р
( т 2 - Т 1 ) 2 2
+ x 1 ( T 2
- Т 1 ) - цу cos( T 1 - ф );
x 2 = - R ( цХ 1 (sin т 2 - sin т 1 ) + цуХ 2 (sin( T 2 - ф ) - sin( T 1 - ф )) - p ( т 2 - т 1 ) + x 1 ) +
+ (1 + R ) ц sin т 2.
В связи с усеченностью фазового пространства по фазовой координате, точечное преобразование T будет определено, если выполнены следующие неравенства
£ - ц cost 0 > - цу cos(t 0 - ф)
- цу cos(T1 - ф) > £ - цcosT1
£ - цcost2 >-цу cos(t2 - ф)
x(т) > f (т) для Т0 < Т < Т1, Т1 < т < т2,
Первое неравенство системы (7) означает, что в начальный момент времени т = т0 изображающая точка принадлежит поверхности S( x = f (т) ) (это условие соответствует ударному взаимодействию первого поршня о шабот), второе неравенство означает, что в момент времени т = т изображающая точка принадлежит поверхности S( x = f2 (т)) (это условие соответствует ударному взаимодействию второго поршня о шабот), третье неравенство означает, что в момент т = т2 изображающая точка вновь попадает на поверхность x = f (т) (вновь происходит ударное взаимодействию первого поршня о шабот). Четвертое неравенство отражает очевидный факт принадлежности изображающей точки подпространству x > f (т) .
Уравнения для нахождения неподвижных точек преобразования Т , соответствующих двухударным (с поочередными ударами каждым поршнем-ударником) периодическим движениям (основной режим) получаются путем добавления к (3) - (6) условий периодичности [17]
^x2 = x0 = x, т2 = т0 + 2.nn (8) Вводя в рассмотрение параметр ^ = Т1 - Т 0, характеризующий время движения изображающей точки между двумя последующими ударами поршней-ударников, получим уравнения для определения координат неподвижной точки в виде x = R(p(2nn - ^) - ;x1) + (1 + R)ц sin т0, p2
£ - цcost0 =- — (2nn - ^) + (2nn - ^)x:1 -
-
- цу cos(t0 + а).
;v1 = R ( p ^ - ;: ) + (1 + R ) цу sin( T 0 + а ),
-
- цу cos(r 0 + а) = - -p ^2 + ^x + £ -А к - ц cost 0,
(a = f - ф, f = Т1 - То )
Из первого и третьего уравнений (11) получим
■ х0 =
Rp(2 п п - f (1 + R )) + (1 + R ) p (sin т0 - R y sin( T 0 + а )) 1 - R 2
■
Х 1
Rp( f - R(2 п п - f )) + (1 + R ) p ( y sin( T 0 + а ) - R sin т 0) 1 - R 2
Подставляя (10) во второе и четвертое уравнения (9) получим систему двух уравнений относительно т0 и f , которую запишем в виде pacost0 - pbsin т0 = A,
- pccost0 + pd sin т0 =-B, где а = (1 - R)(1 - y cosa) + R/f sin а.
b = f (1 - Rycosa) - (1 - R)ysin a c = (1 - R)(1 - ycosa) + (2nn - f)ysin a d = (2nn - f)(R - ycosa) - (1 - R)Ysin a
A = (1 - R )( e -A k ) + -^- | 2 n nR - f (1 + R )2 |
(1 + R ) ( 2 J
B = (1 - R)( £ - A k ) + p ^z f- ( (2 n - f )(1 + R 2) - 2 R f ) Используя (11), получим соотношение
V(Ad - bB)2 + (Ac - Ba)2 ц = ГТ/ n , |ad - bc| определяющее в плоскости ц, f границу существования неподвижных точек, соответствующих основному (с поочередными ударами каждым поршнем о наковальню) периодическому режиму движения.
Устойчивость неподвижной точки определяется, как известно [17], величиной корней характеристического уравнения х ( z ) = 0, который в нашем случае имеет вид
х ( z ) = b 11 b 22 z 2 + ( a11b 22 + a 22 b11 - a 21 b12)z + a11a 22 - a 12 a 21 .
В (12) введены обозначения
R
an = R(1 + R)pycos(t0 + a) + Rp + -^(x - PYsm(T0 + a))
a 12 = ^- ( ц sin t 0 - x ),
a21 = (2nn - f) R (jc - py sin(T0 + a))+ (2nn - f)(1 + R)pycos(t0 + a) +
+ (2nn - f)p - /Cj + pysin(T0 + a), a22 = (2nn - ^) у (^ sin т0 - x),
Ь11 = 1(p^ - x + ^/sin(T0 + a)), b12 = ^(x - pc - ^sin т0) - (Rp + (1 + R)^cost0), b22
= xc1 - (2nn - ^)p - ^sinт0.
Периодическое решение устойчиво, если все корни (12) расположены внутри единичного круга, т.е. выполняется неравенство z < 1 . Нарушение условий устойчивости неподвижной точки происходит либо когда абсолютное значение одного из корней характеристического уравнения становится равным z = ± 1 , либо когда z = exp( ± j ϕ ),0 ≤ ϕ ≤ π . Границы области устойчивости рассматриваемого периодического движения, обозначаемые N + , N - , N ϕ , удовлетворяют уравнениям χ (1) = 0, χ ( - 1) = 0, χ ( e ± j ϕ ) = 0,0 ≤ ϕ ≤ π .
Кроме того, известно [17], что при непрерывном изменении параметров интересующий нас периодический режим движения исчезает либо из-за нарушений условий устойчивости, либо из-за выхода фазовой траектории из области определения соответствующего точечного преобразования. Выход фазовой траектории из области определения точечного отображения, определяемой бифуркационной поверхностью N , связан с касанием траектории в некоторые моменты времени τ поверхности S (рис.2).
Таким образом, область существования устойчивых периодических движений рассматриваемой системы ограничена поверхностями N + , N - , N ϕ и поверхностью
N C .
Границы области устойчивости N + , N - , N ϕ имеют вид
N + : b 11 b 22 + ( a 11 b 22 + a 22 b 11 - a 21 b 12) + ( a 11 a 22 - a 12 a 21) = 0,
N - : b 11 b 22 - ( a 11 b 22 + a 22 b 11 - a 21 b 12) + ( a 11 a 22 - a 12 a 21) = 0,
N ϕ : b 11 b 22 - ( a 11 a 22 - a 12 a 21 ) = 0.
Визуализация и анализ результатов вычислительных экспериментов
Исследование сложной динамики двухпоршневого механизма проведено с помощью численных расчетов с использованием программного комплекса, разработанного в среде Borland Developer Studio 2006 [18 - 20]. Данный комплекс позволяет проводить расчеты фазовых траекторий, бифуркационных диаграмм и областей устойчивости основных режимов движения в пространстве параметров механизма.
Обозначим через D ( m , m ) область существования устойчивых периодических движений в пространстве параметров, где m - число ударов первым поршнем о шабот, m 2 - число ударов вторым поршнем о шабот.
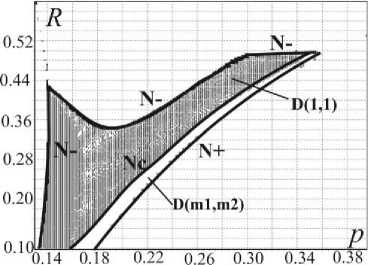
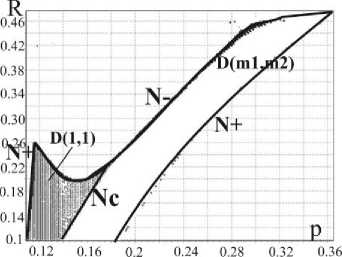
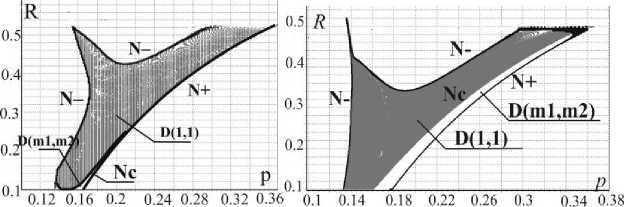
На рис.3 в плоскости (p, R) представлена область D(1,1) (заштрихованная область) для значений параметров γ = 4,ϕ = 0.52, µ = 0.1, k = 0,∆k = 0 и различных значений Е (расстояние от точки крепления шатуна до нижнего основания ПУ). На рис.3а е = 0.02, на рис.Зб е = 0.15.
а)
Рис.3. Область D(1,1) существования устойчивых периодических движений в
б)
плоскости ( p , R ) при различных значениях е .
Бифуркационная граница N [17] существования точечного отображения (11) отсекает из области устойчивости, ограниченную поверхностями N +, N_ , небольшую часть D ( mx , m 2), где тх и m2 не равны одновременно 1.
Сравнивая рис.3а и 3б можно увидеть, что увеличение параметра Е (расстояние от точки крепления шатуна до нижнего основания ПУ) приводит к уменьшению размеров области существования устойчивых периодических режимов движения механизма и смещению области периодических режимов в сторону уменьшения значений частотного параметра p .
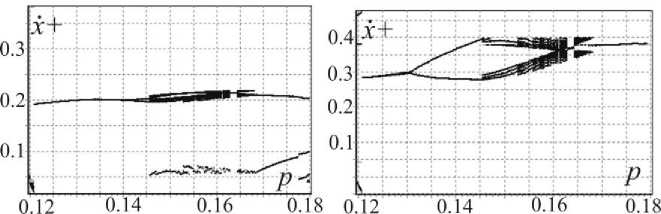
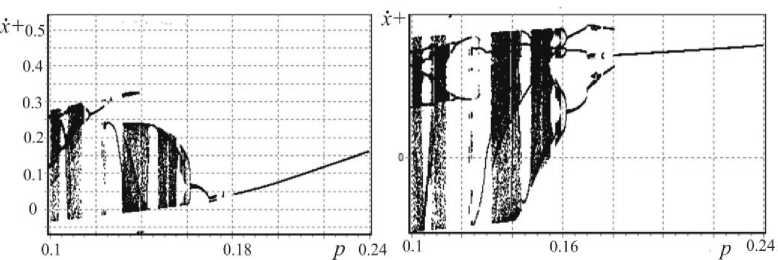
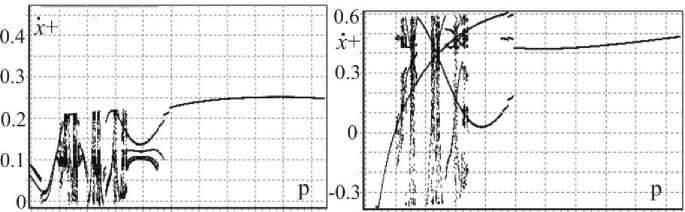
На рис. 4, 5 изображены бифуркационные диаграммы, построенные для того же набора параметров, что и рис. 3а,б соответственно, но при R = 0.22 . На диаграмме на оси абсцисс приведены значения частотного параметра p , а по оси ординат –
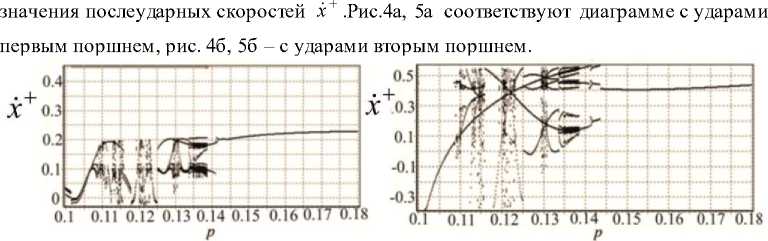
Рис.4. Бифуркационные диаграммы по частотному параметру p для значений
параметров R = 0.22, е = 0.02, у = 4, ф = 0.52, ц = 0.1, к = 0, А к = 0 .
-
а) б)
Рис.5. Бифуркационные диаграммы по частотному параметру p для значений параметров R = 0.22, ε = 0.15, γ = 4, ϕ = 0.52, µ = 0.1, k = 0, ∆ k = 0 .
Из рис. 4, 5 видно, что увеличение ε приводит к смещению области периодических режимов в сторону уменьшения значений частотного параметра p так, на рис.4 основной периодический режим движения наблюдается при 0.145 ≤ p ≤ 0.18 , а на рис.5 при 0.121 ≤ p ≤ 0.13 .
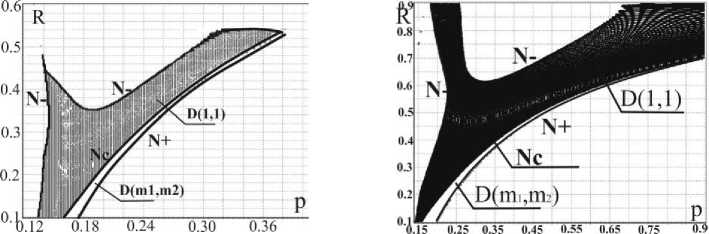
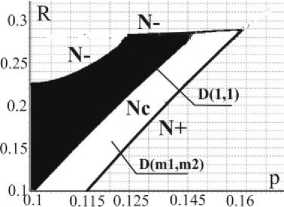
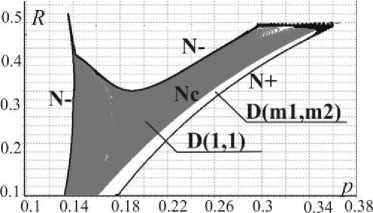
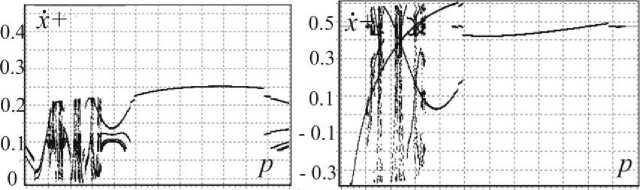
На рис.6 а,б в плоскости (p,R) представлена область D(1,1) значений параметров ε = 0.02,γ = 4,µ= 0.1,k = 0,∆k = 0 и различных значений угла ϕ , на рис.6a ϕ= 0.3, на рис.6б ϕ= 3
а) б)
Рис.6 Область D(1,1) существования и устойчивости периодических движений в плоскости ( p , R ) для различных значений ϕ
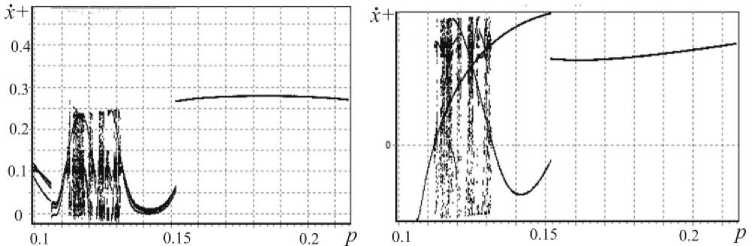
На рис.7, 8 представлены бифуркационные диаграммы по частотному параметру p при том же наборе параметров, что и рис.8а,б соответственно, но при
R = 0.3.
а)
б)
Рис.7. Бифуркационные диаграммы по частотному параметру p для ϕ = 0.3
а) б)
Рис.8. Бифуркационные диаграммы по частотному параметру p для ϕ = 3
На рис.7 основной режим ( m = 1, m = 1 ) наблюдается в интервале 0.15 ≤ p ≤ 0.215, при 0.12 ≤ p ≤ 0.13наблюдается хаотический режим.
На рис.8 для 0.18 ≤ p ≤ 0.24 существует основной режим m = 1, m = 1 , при 0.1 ≤ p ≤ 0.12 и 0.122 ≤ p ≤ 0.16 , наблюдается хаотический режим.
Анализ представленных областей устойчивости и бифуркационных диаграмм показал, что увеличение ϕ (сдвига по фазе между эксцентриситетами) приводит к увеличению областей существования устойчивых периодических режимов, т.е. интервала значений частотного параметра p , при которых существуют периодические движения, становится шире.
На рис.9 в плоскости ( p , R ) представлена область D (1,1) для набора параметров ε = 0.02, γ = 2.5, ϕ = 0.52, µ = 0.1, k = 0, ∆ k = 0 , и различных значений γ = 2.5 (рис.9а) γ = 4(ри.9б).
-
а) б)
0.1 0.11 0.12 0.13 0.1 0.11 0.12 0.13 '
Рис.9. Область D(1,1) существования устойчивых периодических движений в плоскости ( p , R ) для различных значений параметра γ .
На рис.10,11, построенных для того же набора параметров, что и рис.9, представлены бифуркационные диаграммы для R = 0.25 .
На рис.10 основной режим с m = 1, m = 1 существует для 0.116 ≤ p ≤ 0.125 , для 0.112 ≤ p ≤ 0.116 m1 = 2, m2 = 2 , p = 0.116 - бифуркационное значение параметра, при 0.104 ≤ p ≤ 0.112 наблюдается хаотический режим, при 0.1 ≤ p ≤ 0.104 m1 = 2, m2 = 2 .
На рис.11 основной режим наблюдается при 0.15 ≤ p ≤ 0.21 , при 0.13 ≤ p ≤ 0.15 m 1 = 3, m 2 = 2 , при 0.21 ≤ p ≤ 0.22 m 1 = 4, m 2 = 1 , хаотический режим существует при 0.1 ≤ p ≤ 0.13 .
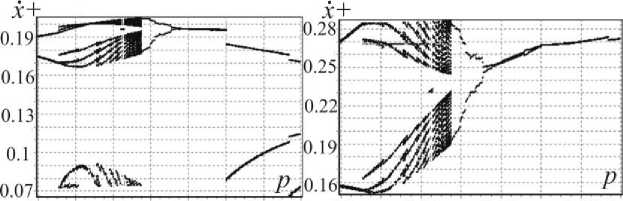
Рис.10. Бифуркационные диаграммы по частотному параметру p для у = 2.5
0.1 0.13 0.16 0.19 0.22 0.1 0.13 0.16 0.19 0.22
Рис.11. Бифуркационные диаграммы по частотному параметру p для у = 4
На рис.12 представлена область устойчивости в плоскости параметров ( p , R )
, где ц = 0.1, е = 0.02, у = 4, ф = 0,52, Х х = 0, Х 2 = 0, к 1 = 0.1,Л к = 0.1, но на рис.12а к = 0, Л к = 0 (не учитываются высоты наковален), на рис.12б кх = 0.1, Л к = 0.1 (высоты наковален учитываются).
а) б)
Рис.12. Области D(1,1) существования и устойчивости периодических движений в плоскости ( p , R ) для различных значений параметров кх , Л к
А на рис.13,14 представлены бифуркационные диаграммы для того же набора параметров, что и рис.12а,б, но для R = 0.25 .
0.1 0.15 0.2 0.1 0.15 0.2
а) б)
Рис.13. Бифуркационные диаграммы по частотному параметру p для к = 0, Лк = 0

0.1 0.14 0.18 o.l 0.14 0.18
-
а) б)
Рис.14. Бифуркационные диаграммы по частотному параметру p для k=0.1,∆k=0.1
Анализ представленных диаграмм и областей устойчивости показал, что учет высот подставок наковален k , k + ∆ k приводит к изменению конфигурации области существования периодических режимов движения. Так на рис.13 видно, что периодический режим для выбранных значений параметров существует при 0.15 ≤ p ≤ 0.205 (без учета высот наковален), а на рис.14 периодический режим существует при 0.16 ≤ p ≤ 0.195 .
Проведенные численные эксперименты позволили сделать вывод о том, что наиболее существенно влияют на динамику механизма параметры ε , ϕ , k , ∆ k .
Заключение
Информационные технологии начинают играть все более важную роль не только как инструмент автоматизации образовательного процесса, но и как отличный полигон для проверки получаемых знаний. Применение информационных технологий в образовании позволит добиться повышения эффективности и качества процесса обучения, и интенсификации процесса научных исследований в образовательных учреждениях;
Список литературы Использование средств информационных технологий для изучения моделей нелинейной динамики
- Zakharova I., Kuzenkov O. Experience in implementing the requirements of the educational and professional standarts in the field if ICT in Russian education // CEUR Workshop Proceedings Selected Papers of the 11th International Scientific-Practical Conference Modern Information Technologies and IT-Education, SITITO 2016. - 2016. - P. 17-31.
- Кузенков О.А., Кузенкова Г.В., Бирюков Р.С. Разработка фонда оценочных средств с использованием пакета MATHBRIDGE//Образовательные технологии и общество. 2016. Т. 19. № 4. С. 465-478.
- Гергель В.П., Кузенков О.А. Разработка самостоятельно устанавливаемых образовательных стандартов Нижегородского госуниверситета в области информационно-коммуникационных технологий // Школа будущего. 2012. № 4. С. 100-105.
- Кузенков О.А., Захарова И.В. Взаимосвязь между проектом METAMATH и продолжающейся реформой высшего образования в России // Образовательные технологии и общество. 2017. Т.20. № 3. С.279-291.
- Басалин П.Д., Белоусова И.И. Интерактивные формы обучения в образовательном процессе // Вестник Нижегородского университета им. Н.И. Лобачевского. - 2014. - № 3-4. - С. 18-21.
- Басалин П.Д., Тимофеев А.Е. Оболочка гибридной интеллектуальной обучающей среды продукционного типа // Международный электронный журнал «Образовательные технологии и общество (Educational Technology
- Макаров Е.М. Использования Java для проверки компетенций по геометрическому моделированию // Образовательные технологии и общество. - 2018. - т. 21, № 1. - с. 494-505.
- Макаров Е. М. Использование домашних заданий по программированию для развития практических компетенций курса «Геометрическое моделирование» // Образовательные технологии и общество. - 2019. - т. 22, № 1. - с. 164-174. - URL
- Комарова С.Н. Компьютерное моделирование как средство развития исследовательской компетенции студентов//Вестник ТГПУ (TSPU Bulletin). 2015.5 (158). С.217-222.
- Igumnov L.A., Metrikin V.S., Grezina A.V., Panasenko A.G. The effect of dry friction forces on the process of dielectric wafer grinding// Journal of Vibroengineering. V. 8. 2016. P. 501-505.
- Игумнов Л.А., Грезина А.В., Метрикин В.С., Панасенко А.Г. Численно-аналитическое моделирование диффузионных процессов в ограниченных многокомпонентных твердых телах // Журнал «Проблемы прочности и пластичности». 2018. Т.80. №.3. С.336-348.
- Грезина А.В. Методика построения упрощенных математических моделей с использованием геометрической схемы связей // Вестник Нижегородского университета им. Н.И. Лобачевского. Серия: Математическое моделирование и оптимальное управление. 2003. № 1. С. 107-114.
- Грезина А.В., Комаров В.Н. Нелинейные эффекты при обработке длинных ступенчатых валов // Вестник Нижегородского университета им. Н.И. Лобачевского. 2011. № 4-2. С. 109-111.
- A. Leonid Igumnov, S. Vladimir Metrikin, V. Irina Nikiforova The dynamics of eccentric vibration mechanism (Part 1). JVE Journal of Vibroengineering, Vol. 19, 2017, p.4816-5656.
- Shilkov V. А., Savalyuk А. D., Metrikin V. S., Polyakov А. А., Shabardin А. K., Alyokhin А. I., Omenenkoi Ya А.с. 1020479 USSR, A Vibro-ram, No. 3376593/29-33, 2005, (in Russian).
- Неймарк Ю.И. Метод точечных отображений в теории нелинейных колебаний. М.: ЛИБРОКОМ, 2010. - 472 с.
- Фейгин М.И. Вынужденные колебания систем с разрывными нелинейностями. М.: Наука, 1994. 285 с.
- Архангельский А.Я. C Builder 6. Справочное пособие. М.:Бином-Пресс, 2002. - 544 с.
- Керниган Б.В., Ричи Д.М. Язык программирования СИ. Вильямс, 2016. - 288 с.
- Страуструп Б. Язык программирования С. Бином, 2011. - 1136 с.
