Исследование движения плоского шестизвенного внутритрубного мобильного робота

Автор: Мальчиков Андрей Васильевич, Яцун Сергей Фдорович, Рублев Сергей Борисович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Современные технологии в промышленности, строительстве и на транспорте
Статья в выпуске: 4-5 т.14, 2012 года.
Бесплатный доступ
В статье рассмотрена конструкция плоского шестизвенного мобильного робота предназначенного для мониторинга внутренней поверхности трубопроводов. Предложена математическая модель движения и представлены результаты численного моделирования движения конструкции под действием крутящих моментов, создаваемых приводами средней пары звеньев робота.
Шестизвенный мобильный робот, мониторинг, трубопровод, математическая модель
Короткий адрес: https://sciup.org/148201373
IDR: 148201373 | УДК: 62-503.57
Research the movement of flat six-links intrapipe mobile robot
In article the design of flat six-link mobile robot intended for monitoring the internal surface of pipelines is considered. The mathematical model of movement is offered, and results of numerical modeling of de-sign movement under the influence of the torques created by drives of middle couple of robot links are presented.
Текст научной статьи Исследование движения плоского шестизвенного внутритрубного мобильного робота
Трубопроводы на сегодняшний день являются основными элементами систем транспортировки газообразных и жидких веществ, а также твёрдых веществ в виде раствора на большие расстояния. Так как подобные системы, как правило, устанавливаются под землей или внутри зданий, то существует проблема ограниченности доступа к трубам при выполнении работ по проверке состояния и поддержании их эксплуатационных свойств. Крайне актуальной задачей является разработка и изучение способов, позволяющих осуществлять мониторинг состояния внутренней поверхности трубопровода, поиск микротрещин, разрывов и т. д., не требуя при этом доступа к трубе на всей протяженности. На сегодняшний день разработан ряд различных подходов к перемещению внутри трубопроводов. Главным недостатком традиционных колесных и гусеничных систем является низкая проходимость в условиях загрязненности трубы [1, 2]. Наиболее перспективными являются многозвенные конструкции, копирующие змее- и червеподобные походки [3, 4], способные перемещаться в условиях загрязненности трубопровода, а также смены диаметра и поворотов.
В основе перемещения рассматриваемой в данной работе конструкции лежит принцип поочередной фиксации передней и задней пары звеньев (фиксирующих модулей) и перемещения центра масс робота при движении средней пар звеньев. Процесс фиксации внутри трубопровода подробно описан в работах [5, 6]. В данной же работе рассматривается движение средней пары звеньев робота внутри трубопровода.
Описание схемы робота. Рассмотрим конструкцию робота внутри трубопровода (рис. 1). Звенья 1 и 2 осуществляют фиксацию робота внутри трубопровода за счет сил трения. Точку А 3 считаем неподвижной. Введем неподвижную систему координат с центром в точке А 3, и повернутую на угол ζ относительно линии горизонта. Звенья 3 и 4
осуществляют перемещение переднего фиксирующего модуля (звенья 5 и 6) под действием крутящих моментов M 23 и M 34 . При этом звенья 5 и 6 не совершают движения между собой и поэтому рассматриваются в нашем случае как сосредоточенная масса, приложенная в точке А 5 . Примем, что центры масс звеньев A 3 А 4 и A 4 А 5 расположены в их геометрических центрах O 3 , O 4 . Введем подвижные системы координат X 3 Y 3 O 3 и X 4 Y 5 O 4 связанные с центрами масс звеньев. В точке А 5 действует приведенная сила F 5 и приведенный момент M 5 , которые определяются путем приведения сил веса звеньев, а также сил инерции действующих на звенья 4 и 5.
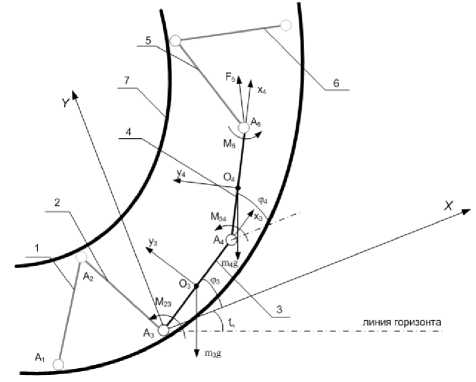
Рис. 1. Расчетная схема мобильного робота
Математическая модель движения робота. Для расчета кинематических параметров движения средних звеньев, в качестве обобщенных координат примем углы поворота обоих звеньев относительно их центров масс φ 3 , φ 4 и запишем систему дифференциальных уравнений, основываясь на уравнениях Лагранжа 2-го рода. При этом правые части уравнений получим методом возможных перемещений. После преобразований итоговая система дифференциальных уравнений описывающих движение третьего и четвертого звена робота примет вид:
Г 2 У 1 1 2 . Z
Ф 4 I J A, + I + - m 4 1 3 1 4 Фз COs( Ф з - ф 4 ) - - m 4 1 3 1 4 Ф 3 М<Ф 3
- Ф 4) =
= M 34 - M 5 + F 5 1 4 sm( a 5 - ф 4 ) + т 4 g — cos( ^ + Ф 4 )
А 2
ф 3 ( J ^ + m 4 1 3 2 ) + 1 т 4 1 3 1 4 ф 4 cos( ф 3 - р 4 ) + 1 m 4 1 3 1 4ф4 sin( p 3 - р 4 ) =
= M 23 + F 5 1 4 sin( a 5
- Ф з ) + т 4 g 1 4c os( z + Ф з ) + т 3 g ^ cos( z + Ф з )
Рассмотрим крутящие моменты между звеньями робота М23 и М34. В общем случае крутящий момент между звеньями можно описать следующим уравнением: Мi=Miдв – Мiсопр, где i – номер шарнира, Miдв – момент развиваемый электроприводом i-того шарнира, а Мiсопр – момент сопротивления движению звеньев. Представим момент сопротивления как: М!сопр = ^ • Ф4 + М!тр, где ^ - коэффициент вязкого сопротивления, Мiтр – суммарный момент силы трения. Опишем момент силы трения, согласно закону Кулона:
M 1 тр . предsign( ф, ), если Ф , ^ 0;
M тр
м внеш , если ф_ = о и ^ м =неш| < м ^тр.пред ;
M 2"р'е^1дп( ^ M °неш ), если ^ = 0 ^ M °неш| > M тр пред,
где ΣМiвнеш – равнодействующая всех внешних моментов для i-того шарнира, кроме моментов сил сухого трения; Мiтр.пред – предельное значение силы трения, определяемая действующими силами в шарнире и коэффициентом силы трения, в данном случае, может быть определена экспериментально для конкретно взятого привода; Фi - скорость вращения звеньев для i-того шарнира.
О 2 4 6 8 1О ^ с
б)
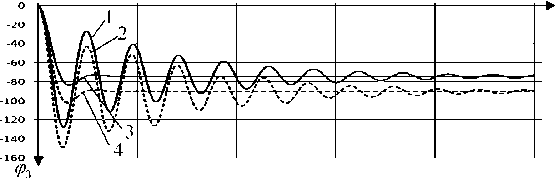
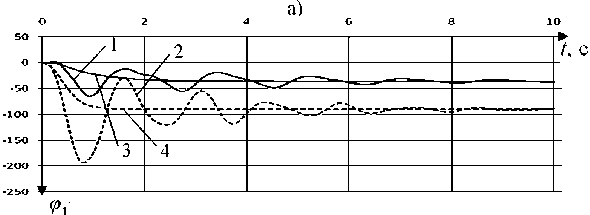
Рис. 2. Графики угла поворота звеньев под действие силы тяжести:
-
а) для третьего звена, б) для четвертого звена. 1 – угловое перемещение звена при коэффициенте силы вязкого сопротивления равном 0,001 и наличии момента силы трения в шарнире; 2 – перемещение при коэффициенте силы вязкого сопротивления равном 0,001, без силы трения; 3 – перемещение при коэффициенте силы вязкого сопротивления 0,01 и наличии момента сил трения в шарнире; 4 – перемещение при коэффициенте силы вязкого сопротивления = 0,01, без учета трения
Результаты численного моделирования. Наличие сил сухого трения в модели приводит к разрывному характеру правых частей системы уравнений, в том числе появляется режим останова звеньев, поэтому вычислительный алгоритм расчета содержит специальные блоки операций, позволяющих смоделировать такие эффекты. Для определения характера движения звеньев под действием силы тяжести и моментов сопротивления в шарнире, были получены зависимости углового перемещения от времени при различных параметрах системы (рис. 2).
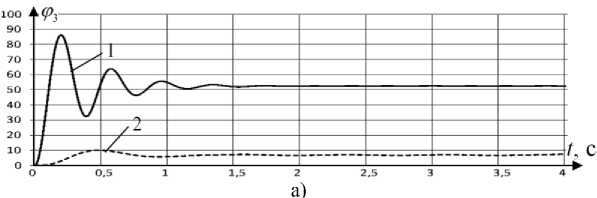
Покажем результаты моделирования движения звеньев под действием крутящих моментов электроприводов, задаваемых как: М дв = k дв ( φ i з –
φ i факт ), где k дв – моментный коэффициент, φ i з – задаваемый угол, φ i факт – фактическое значение угла. Покажем результаты моделирования при задаваемом угле для обоих звеньев φi з =60о. Как видно из графиков, при малых значениях коэффициента усиления крутящий момент, развиваемый электроприводом, недостаточен для компенсации сил трения и сил тяжести. Однако увеличение коэффициента пропорциональности приводит к повышению колебательности системы, а следовательно ухудшению переходной характеристики. Далее покажем траектории перемещения точек А 4 и А 5 , при движении звеньев под действием крутящих моментов электроприводов. Точками показаны положения А 4 и А 5 в установившемся режиме.
90 кф4
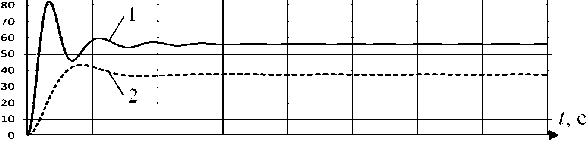
О 0,5 1 1,5 2 2,5 3 3,5
-
б)
Рис. 3. Графики угла поворота звеньев под действие моментов развиваемыми приводами: а) третье звено, б) четвертое звено. 1 – коэффициент при системе управления kдв =0,5; 2 – коэффициент при системе управления k дв =0,1.
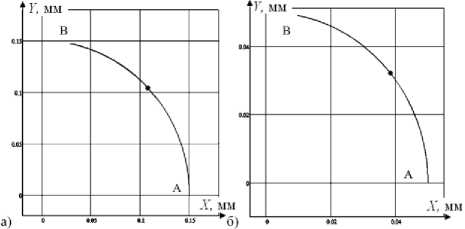
Рис. 4. Траектории движения точек А 4 (а) и А 5 (б) по действием крутящих моментов привода (движение происходит из точки А в точку В)
Выводы:
-
1. Составлена математическая модель движения плоского шестизвенного внутритрубного мобильного робота, позволяющая описать различные режимы движения устройства, отличающаяся тем, что в модели учитываются силы сухого трения в приводах, сила вязкого сопротивления, а также взаимодействие звеньев робота с внутренней поверхностью трубопровода.
-
2. Разработан алгоритм численного решения уравнений, позволяющий получить временные диаграммы и зависимости параметров определяющих характер движения звеньев робота.
-
3. Установлено, что наличие сухого и вязкого трения в шарнирных соединениях робота существенно влияет на характер движения звеньев робота. Так, увеличение коэффициента вязкого трения в 10 раз снижает колебательность системы в 4-5 раз. В то же время введение
силы сухого трения обуславливает появление статической ошибки.
Работа выполнена в рамках реализации федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009-2013 гг (Соглашение № 14.132.21.1718).
Список литературы Исследование движения плоского шестизвенного внутритрубного мобильного робота
- Maneewarn, T Design of Pipe Crawling Gaits for a Snake Robot, proc/T. Maneewarn, B. Maneechai//IEEE Int. Conf. Robotics. Biomimetics. 2008. P. 1-6.
- Shin, H.C. Development of a Snake Robot Moving in a Small Diameter Pipe/H.C. Shin, K.M. Jeong, J.J. Kwon//Int. Conf. Control, Automation, System. 2010. P. 1826-1829.
- Мальчиков, А.В. Адаптивный мобильный робот для перемещения внутри трубопроводов/А.В. Мальчиков, С.Ф. Яцун//Современная мехатроника: сб. науч. трудов Всерос. науч. школы. -Орехово-Зуево, 2011. С. 121-125.
- Мальчиков, А.В. Динамические опорные элементы ползающих роботов для движения по наклонным поверхностям/А.В. Мальчиков, С.Ф. Яцун, А.И. Жакин//Известия Юго-Западного государственного университета. 2012. №2 (41). Ч.1. С. 89-95.
- Мальчиков, А.В. Автоматизированный мобильный комплекс для диагностики трубопроводов переменного диаметра/А.В. Мальчиков, С.Ф. Яцун//Автоматизация и современные технологии. 2012. № 12. С. 3-8.
- Мальчиков, А.В. Разработка математической модели опорного элемента ползающего робота, оснащенного бурильным модулем/А.В. Мальчиков, С.Ф. Яцун//Управляемые вибрационные технологии и машины: сб. научн. ст. -Курск, 2012. С.116-123.
