Исследование и обоснование компоновки и параметров гидропривода механизма подъёма лесного манипулятора

Автор: Попиков П.И., Четверикова И.В., Евсиков И.Д., Мозговой Н.В., Богданов Д.С.
Журнал: Resources and Technology @rt-petrsu
Статья в выпуске: 3 т.20, 2023 года.
Бесплатный доступ
В работе изложены способы снижения динамических нагрузок конструкции лесных манипуляторов в зависимости от компоновки гидравлических цилиндров механизма подъёма стрелы. Составлена математическая модель процесса подъёма стрелы манипулятора. Проведена оптимизация параметров гидропривода подъёма стрелы. Установлено, что оптимизация компоновки гидравлических цилиндров подъёма стрелы лесного манипулятора с учётом сил инерции и податливости гидропривода позволит снизить пиковые всплески давления рабочей жидкости при переходных режимах подъёма лесных грузов. Разработана новая конструктивно-технологическая схема механизма подъёма стрелы манипулятора, обеспечивающая автоматическую установку гидравлического цилиндра подъёма стрелы в оптимальное положение и демпфирование колебаний рабочей жидкости. Установлено, что при уменьшении номинальной подачи угловая скорость стремится стабилизироваться, а пиковые давления возрастают от 16 до 40 МПа. Проверено, что при увеличении коэффициента податливости гибких элементов гидропривода в 2 раза и коэффициента утечек в 2 раза давление рабочей жидкости возрастает и уменьшается соответственно в 2 раза. Получена оптимальная величина параметра b 1 - точки присоединения гидроцилиндра к стреле, которая равна 0,6 м. За счёт оптимизации компоновки гидравлического цилиндра подъёма стрелы и увеличения коэффициента податливости упругих элементов гидропривода происходит снижение динамических нагрузок на 41 %, но при этом возрастает время затухающих колебаний давления при переходных процессах на 32 %. Это позволит сократить время простоев манипулятора в ремонте из-за поломок гидрооборудования, что компенсирует незначительное увеличение времени переходных процессов.
Лесные манипуляторы, кинематика, математическая модель, гидравлическое оборудование, стрела
Короткий адрес: https://sciup.org/147242008
IDR: 147242008 | УДК: 630*36 | DOI: 10.15393/j2.art.2023.7063
Investigation and justification of the layout and parameters of the hydraulic drive of the lifting mechanism of the forest manipulator
The paper describes ways of reducing the dynamic loads on a forest manipulator construction according to the layout of the hydraulic cylinders of the boom lifting mechanism. A mathematical model of the manipulator boom lifting process has been generated. The parameters of the boom lifting hydraulic drive have been optimized. It is established that the optimization of the hydraulic cylinders layout for lifting the forest manipulator boom by taking into account the inertia forces and the hydraulic drive flexibility will reduce working fluid pressure surge during transient modes of forest freight lifting. A new design and technological scheme of the boom lifting mechanism of the manipulator has been developed to provide automatic optimal positioning of the hydraulic boom lifting cylinder and working fluid vibration damping. It is found that with a decrease in the nominal feed the angular velocity tends to stabilize and peak pressures increase from 16 MPa to 40 MPa. It has been verified that with twofold increases of the flexibility coefficient of elastic hydraulic drive elements and of the leakage factor the pressure of the working fluid increases and decreases by 2 times respectively. The optimal value of the parameter b1, that is the point of the hydraulic cylinder attachment to the boom should be equal to 0.6 m. Dynamic loads are reduced by 41 % due to optimizing the layout of the hydraulic boom lifting cylinder and increasing the flexibility coefficient of the elastic elements of the hydraulic drive. However, the time of damped pressure fluctuations during transients is increased by 32 %. Therefore, the manipulator repair downtime due to hydraulic equipment breakdowns will be reduced to compensate for a slight increase in the time of transient modes.
Текст научной статьи Исследование и обоснование компоновки и параметров гидропривода механизма подъёма лесного манипулятора
-
1. Введение
В настоящее время заготовка древесины по-прежнему является доминирующей формой использования лесных ресурсов Российской Федерации. Площадь, на которой осуществляется лесозаготовка, превышает 170 млн га. Согласно Распоряжению Правительства РФ № 1989-р от 20 сентября 2018 г. «О Стратегии развития лесного комплекса РФ до 2030 г.», лесохозяйственному производству требуется техническая и технологическая модернизация с использованием лучших доступных технологий [1]. Импортная техника по производительности и универсальности, надёжности и удобству, простоте эксплуатации и сервисному обслуживанию превосходит отечественные аналоги, но стоит в 2—3 раза дороже. Поэтому важной является проблема импортозамещения оборудования для лесопромышленных предприятий. Таким образом, задача разработки эффективной техники для лесного комплекса, сочетающей новые технические решения, которые смогут обеспечить снижение динамической нагруженности, энергоёмкости, металлоёмкости и вредного воздействия на окружающую среду и оператора, является актуальной.
-
2. Материалы и методы
При проведении сплошных рубок и рубок лесоводственного ухода для вывоза сортиментов и хлыстов широко применяются погрузочно-транспортные машины, оборудованные манипуляторами, что обусловлено их универсальностью и экономической эффективностью. Как показывает анализ исследования динамики гидропривода лесных манипуляторов [2], [3], [4], при подъёме стрелы в рабочих процессах механизмов возникают большие динамические нагрузки [5], [6], [7]. Это приводит к резким скачкам давления рабочей жидкости и уменьшает производительность и надёжность гидроманипуляторов. Известно, что в машинах манипуляторного типа в общем числе возникающих поломок отказы в работе гидропривода составляют 30 %. Максимальные нагрузки манипулятор преодолевает во время переходных процессов при разгоне и торможении движущих звеньев. На число переходных процессов в одном цикле работы манипулятора влияет количество разгонов и торможений движущих звеньев. От характера изменения и значений, возникающих при переходных режимах работы динамических нагрузок, зависит надёжность конструкции. Это говорит о том, что для создания и внедрения манипуляторов высокого технического уровня необходимо более глубокое изучение вопросов кинематики, динамики и компоновки гидроцилиндров.
Объект исследования — гидропривод механизма подъёма стрелы манипулятора сортиментовоза. Предметом исследования является математическая модель рабочих процессов и поиск оптимальных конструктивных параметров гидропривода механизма подъёма стрелы манипулятора.
На рисунке 1 показана предлагаемая гидрокинематическая схема усовершенствованного механизма подъёма стрелы манипулятора. Механизм подъёма стрелы манипулятора состоит из гидроцилиндра 1, шарнирно соединённого через ролики 4 и 5 со стрелой 2 и колонной 3. Ролики 4 и 5 имеют возможность качения в направляющих 6 и 7, выполненных с криволинейным профилем и жёстко закреплённых на стреле и колонне. Корпус гидроцилиндра 1 жёстко соединён под прямым углом с имеющей подвижное соединение с осью 9 штангой 8. Ось 9 совпадает с осью соединяющего колонну и стрелу шарнира. Шток дополнительного гидроцилиндра 10 шарнирно соединён с роликом 5, а его корпус шарнирно соединён с колонной 3. Штоковая и поршневая полости дополнительного гидроцилиндра 10 сообщаются с соответствующими полостями гидроцилиндра 1 подъёма стрелы 2 и посредством гидролиний 12 и 13 параллельно подсоединены к распределителю 11. Криволинейный профиль направляющих 6, закреплённых на колонне 3, выполнен по окружности, центр которой совпадает с осью шарнирного с оедин ения поворотной колонны 3 и стрелы 1, а радиус определяется по формуле R = ^/ Ш + Ь2 , где /ш — длина штанги 8, b — длина участка гильзы гидроцилиндра 1 от места крепления штанги к гидроцилиндру до центра ролика 5. Для гашения колебаний между гидролиниями добавляется демпфер 14.
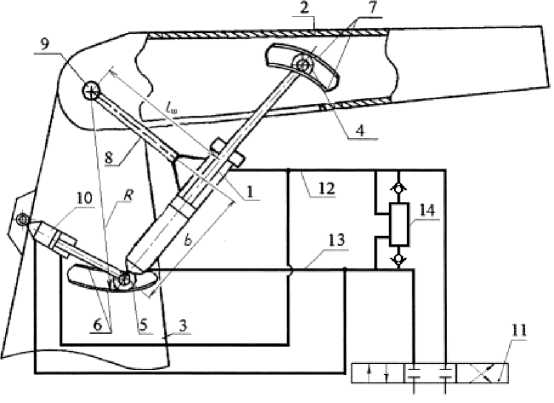
Рисунок 1. Гидрокинематическая схема механизма подъёма стрелы манипулятора: 1 — гидроцилиндр; 2 — стрела; 3 — колонна; 4 и 5 — ролики; 6 и 7 — направляющие; 8 — штанга; 9 — ось; 10 — дополнительный гидроцилиндр; 11 — распределитель; 12 и 13 — гидролинии; 14 — демпфер
Figure 1. Hydrokinematic scheme of the lifting mechanism of the manipulator boom: 1 — hydraulic cylinder; 2 — boom; 3 — column; 4 and 5 — rollers; 6 and 7 — guides; 8 — rod; 9 — axis; 10 — additional hydraulic cylinder; 11 — distributor; 12 and 13 — hydraulic lines; 14 — damper
Механизм подъёма стрелы манипулятора работает следующим образом. Стрела 2 поднимается при выдвижении штоков гидроцилиндра 1 и дополнительного гидроцилиндра 10. Соединённые с гидроцилиндром 1 и дополнительным гидроцилиндром 10 ролики 4 и 5 перемещаются в направляющих 6 и 7. Поскольку штоковые и поршневые полости гидроцилиндра 1 и дополнительного гидроцилиндра 10 посредством гидролиний 12 и 13 параллельно подсоединены к распределителю 11, то давление рабочей жидкости в соответствующих полостях гидроцилиндров будет одинаковое в процессе подъёма стрелы 2, а гидроцилиндр 1 будет занимать оптимальное положение с минимальным усилием на штоке автоматически. При этом обеспечивается подъём стрелы на заданный угол, а энергозатраты механизма подъёма манипулятора снижаются, возможность заклинивания ролика в нижнем положении стрелы исключается. Это позволяет повысить надёжность и расширить технологические возможности стрелового оборудования манипулятора.
Задача оптимизации положения гидроцилиндра в статическом режиме была решена 50 лет назад различными методами — аналитическим и графическим. Сегодня для новой схемы необходимо решить задачу оптимизации положения гидроцилиндра с учётом динамики и коэффициента податливости гидропривода. Подобные задачи решались в ВГЛТУ более 10 лет назад. Коэффициент податливости гидропривода — величина переменная, определяется экспериментальным путём для каждого опытного образца. Есть мнение отдельных учёных, что коэффициент податливости и динамические нагрузки не оказывают влияния на выбор оптимальных точек присоединения гидроцилиндра, т. е. они одинаковые для статических и динамических нагрузок. Однако логично полагать, что динамика и коэффициент податливости гидропривода должны влиять на выбор оптимальных точек присоединения гидроцилиндра.
Процесс принятия решения о способах модернизации технического оборудования при современном уровне развития цифровых технологий невозможен без моделирования рабочего процесса. Важная часть такого моделирования — обоснование метода модернизации рабочего процесса или технической конструкции механизмов с целью увеличения эффективности работы [8], [9], [10].
Система дифференциальных уравнений расхода рабочей жидкости в гидроприводе и движения стрелы c учётом воздействия сил инерции и податливости гидропривода имеет следующий вид:
n d 1 • О n d 1 n d p dP
QK, = ---b sin в +---R —- + avP + K„ —, t 4 1 4 dt y p dt
(Jc + ml^ )d^ = ^d- Pbi Sin в + ^dL PR - g(ml + mclH )cos(p - Фн ), dt 2 4 4
где Q — номинальная подача насоса, м3/с; t — время, с; J c — момент инерции стрелы относительно шарнира О, кг·м2; m — масса пачки сортиментов, кг; l — длина стреловой группы ОС, м; g = 9,8 м/с2; b 1 — расстояние от оси вращения стрелы до верхнего шарнира гидроцилиндра, м; а у — коэффициент, учитывающий утечки жидкости, м5/Нс; Р — текущее значение давления в гидроприводе, Па; К р — коэффициент податливости гибких элементов гидропривода, м5/Па; d — внутренний диаметр гидроцилиндра, м; d 1 — внутренний диаметр дополнительного гидроцилиндра, м; R — радиус окружности криволинейного профиля направляющей 6 (рисунок 2), м; φ — текущий угол подъёма стрелы, град.; m с — масса стреловой группы, кг; l н — длина отрезка от шарнира О до центра масс стреловой группы, м; К t — коэффициент нарастания подачи рабочей жидкости до значения Q н ; обозначения остальных параметров, входящих в систему уравнений (1), ясны из рисунка 2.
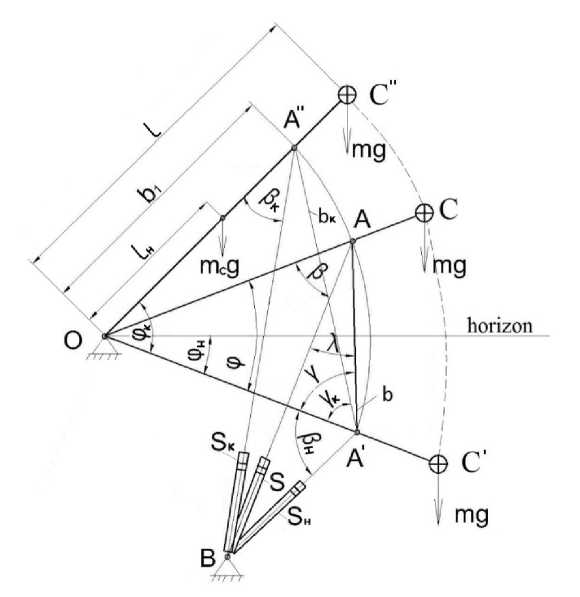
Рисунок 2. Расчётная схема механизма подъёма стрелы
Figure 2. The design scheme of the boom lifting mechanism
Положение гидроцилиндра будет влиять на расстояние b 1 и критическое значение угла β k . Таким образом, эти соотношения являются базовыми аксиомами, которые могут изменяться при изменении положения цилиндра (параметр b 1 ).
Результатом модельного эксперимента должна стать зависимость величины пикового давления P max от положения гидроцилиндра, по которой можно определить величину, например, относительного снижения давления или минимальное значение из максимально возможных показателей.
Решение системы дифференциальных уравнений (1) для определения значения давления рабочей жидкости и угла подъёма стрелы было проведено путём численного интегрирования макета программы для ЭВМ,
при последовательных итерациях h = A t с применением составленного с помощью табличного редактора MS Excel.
Коэффициент податливости по эмпирической зависимости
гибких
элементов
гидропривода определялся
K p
10 - 5
7,28 • P + 106
, м 5 / Па ,
Для решения системы (1) математическая модель зависимостями:
была дополнена следующими
в = у — X ,
X = arcsin
(S , Л "Н sin ( в н + У )
V S 7
S 2 = b 2 + S 2 - 2 bS „ cos ( e „ + у ) ,
b = 2 b sin — , 1 2
b + S^ — S^ в = arccos — н---к н 2b S кн
^“
У к ,
bK = 2 b sin — к , к 1 2
Ук = 90° — —к" ,
у = 90° —
—
2 ,
где S н и S к — стандартные начальная и конечная длины гидроцилиндра, задаются в исходных данных, м; S — текущая длина гидроцилиндра.
Входные параметры программы представлены в таблице. Границы варьирования углов φ поворота элемента определяются из грузовысотных характеристик манипулятора.
Таблица. Входные параметры программы
Table. Program input parameters
|
Параметр |
Значение |
|
Подача в единицу времени Q |
0,00133 м3/с |
|
Диаметр цилиндра стрелы d |
0,1 м |
|
Коэффициент утечек в гидросистеме а у |
2·10–12 м3/(Па/с) |
|
Время нарастания расхода рабочей жидкости |
0 с |
|
Параметр b 1 |
0,447 м |
|
Дискретность изменения времени |
0,005 с |
|
Момент инерции стреловой группы относительно точки О |
7350 кг·м2 |
|
Масса груза m |
884 кг |
|
Вылет манипулятора l |
6,15 м |
|
Масса стреловой группы m c |
433 кг |
|
Расстояние от точки О до центра масс стреловой группы l н |
3,34 м |
|
Начальное значение угла γ |
76,25° |
|
Значение угла δ |
11,61° |
|
Начальное значение угла φ |
φ н = –15° |
|
Конечное значение угла φ |
φ к = 80° |
|
Время выдержки после остановки |
0 с |
|
Минимальная длина гидроцилиндра S н |
1 ^ 1,5 м |
|
Максимальная длина гидроцилиндра S к |
1.8 ^ 2,3 м |
|
Шаг оптимизации положения |
0,01 м |
|
Время на процесс поднятия |
3 с |
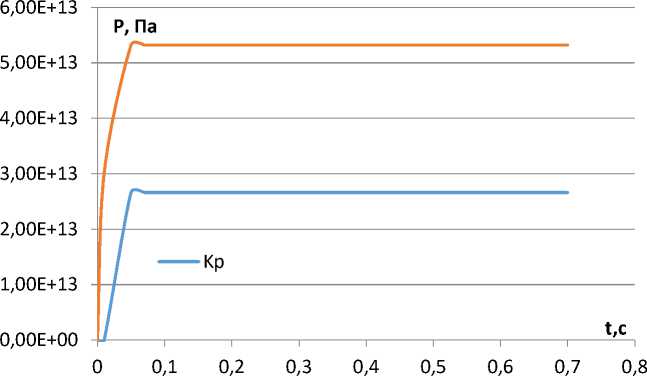
Рисунок 3. Зависимость давления рабочей жидкости от времени в статическом режиме при разных коэффициентах податливости.
Figure 3. The dependence of the working fluid pressure on time in static mode with different flexibility coefficients.
3,00E+13
2,50E+13
2,00E+13
1,50E+13
1,00E+13
5,00E+12
0,00E+00
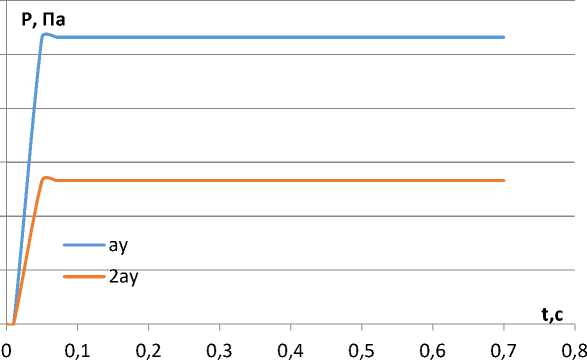
Рисунок 4. Зависимость давления рабочей жидкости от времени в статическом режиме при разных коэффициентах утечки
Figure 4. The dependence of the working fluid pressure on time in static mode at different leakage coefficients
Графики зависимости угловой скорости подъёма стрелы манипулятора при разных значениях номинальной подачи, представленные на рисунке 5, говорят о том, что при уменьшении номинальной подачи угловая скорость стремится стабилизироваться, тогда как с ростом подачи от Q = 0,0005 м3/с до Q = 0,00133 м3/с она нелинейно возрастает от величины 0,4 рад./с до 0,6 рад./с.
а
б
Рисунок 5. Характер изменения угловой скорости подъёма стрелы манипулятора при разных значениях номинальной подачи в динамическом режиме: а — Q = 0,00133 м3/с; б — Q = 0,0005 м3/с
Figure 5. Changes in the angular velocity of the manipulator lifting boom at different values of the nominal feed in dynamic mode: (a) Q = 0.00133 m3/s; (b) Q = 0.0005 m3/s
На рисунке 6 показаны примеры графиков зависимости давления рабочей жидкости от времени при разных значениях номинальной подачи.
Рисунок 6. Зависимость давления рабочей жидкости от времени в динамическом режиме при разных значениях номинальной подачи: а — Q = 0,00133 м3/с; б — Q = 0,0005 м3/с
Figure 6. The dependence of the working fluid pressure on time in dynamic mode at different values of the nominal flow: (a) Q = 0.00133 m3/s; (b) Q = 0.0005 m3/s
Полученные зависимости максимального давления и максимальной динамической нагрузки при подъёме стрелы манипулятора от параметра b 1 для двух значений номинальной подачи приведены на рисунках 7 и 8.
Рисунок 7 Зависимость максимального давления от параметра b 1 при подъёме стрелы манипулятора для двух значений номинальной подачи
Figure 7. The dependence of the maximum pressure on parameter b 1 when lifting the manipulator boom at two nominal feed values
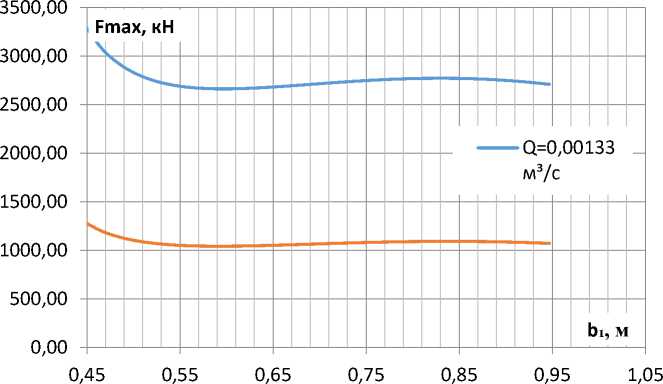
Рисунок 8. Зависимость максимальной динамической нагруженности от параметра b 1 при подъёме стрелы манипулятора для двух значений номинальной подачи
Figure 8. The dependence of the maximum dynamic load on parameter b 1 when lifting the manipulator boom at two nominal feed values
Для проверки адекватности математической модели рабочего процесса механизма подъёма стрелы манипулятора разработана конструкция и изготовлен действующий лабораторный стенд, представленный на фото 1.
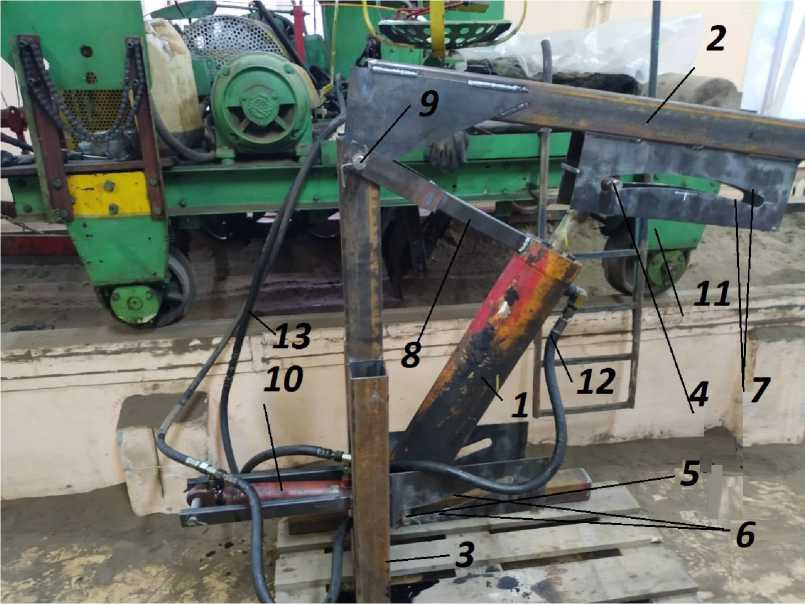
Фото 1. Действующий лабораторный стенд манипулятора: 1 — гидроцилиндр;
-
2 — стрела; 3 — колонна; 4 и 5 — ролики; 6 и 7 — направляющие; 8 — штанга;
-
9 — ось; 10 — дополнительный гидроцилиндр; 11 — передвижная насосная станция; 12 и 1 3 — гидролинии
Photo 1. Operating laboratory stand of the manipulator: 1 — hydraulic cylinder; 2 — boom;
-
3 — column; 4 and 5 — rollers; 6 and 7 — guides; 8 — rod; 9 — axis; 10 — additional hydraulic cylinder; 11 — mobile pumping station; 12 and 13 — hydraulic lines
-
4. Заключение
Проведённые тензометрические испытания гидропривода лабораторного стенда с записью давления рабочей жидкости в гидроцилиндрах 1 и 10 с помощью датчиков давления ZET 315 и тензолаборатории ZETLAB подтвердили адекватность математической модели с расхождением теоретических и экспериментальны данных 8—9 % (рисунок 9).
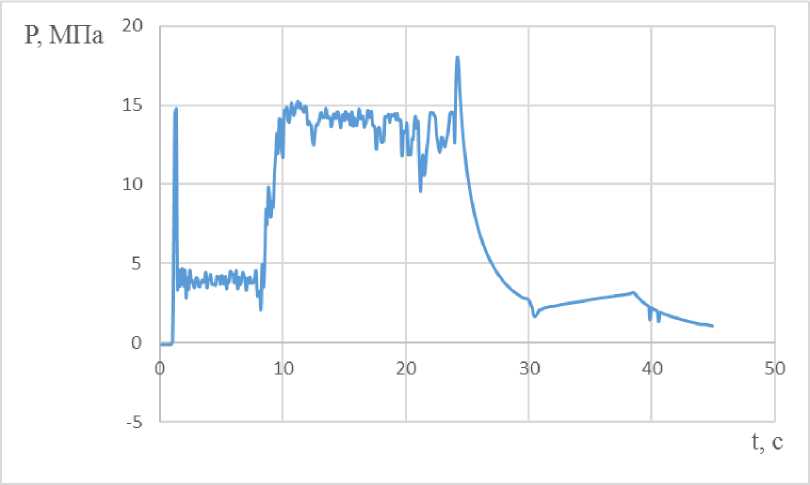
Рисунок 9. Зависимость давления рабочей жидкости в гидроцилиндре подъёма стрелы от времени в динамическом режиме при номинальной подаче насоса Q = 0,0005 м3/с
Figure 9. Dependence of the pressure of the working fluid in the boom lifting hydraulic cylinder on the time in dynamic mode with nominal pump supply Q = 0.0005 m3/s
Анализ проведённого обзора показывает, что при производстве манипуляторов для леса сформировались устойчивые конструктивные решения. Однако работа над конструкциями с целью улучшения их эксплуатационных характеристик, прочности, надёжности, эргономических качеств, снижения массы, повышения энергетической эффективности, устойчивости к коррозии и освещения рабочей площадки должна быть продолжена, поскольку в процессе эксплуатации гидроманипуляторов наблюдается преждевременный выход из строя гидрооборудования. Необходимы новые разработки по усовершенствованию гидросистемы, позволяющие повысить технический уровень лесных манипуляторов.
Динамическая нагруженность конструкции лесных манипуляторов во многом зависит от компоновки гидроцилиндров подъёма стрелы, как наиболее нагруженного механизма, а также от податливости гидропривода. Таким образом, задача снижения динамической нагруженности и энергоёмкости рабочих процессов механизма подъёма стрелы лесного манипулятора путём оптимизации компоновки и параметров гидропривода является актуальной.
Разработана новая конструктивно-технологическая схема механизма подъёма стрелы манипулятора, обеспечивающая автоматическую установку гидроцилиндра подъёма стрелы в оптимальное положение и демпфирование колебаний рабочей жидкости.
Разработана математическая модель рабочего процесса механизма подъёма стрелы манипулятора и программа решения её на ЭВМ. В результате моделирования установлено, что выбор компоновки гидроцилиндра влияет на величину максимальных всплесков давления рабочей жидкости и максимальную нагруженность. Получена оптимальная величина параметра b 1 точки присоединения гидроцилиндра к стреле, равная 0,6 м. Оптимальные точки для компоновки гидроцилиндра при динамическом режиме зависят от номинальной подачи.
Зависимости угловой скорости подъёма стрелы манипулятора при разных значениях номинальной подачи показали, что при уменьшении номинальной подачи угловая скорость стремится стабилизироваться, тогда как с ростом подачи от Q = 0,0005 м3/с до Q = 0,00133 м3/с она нелинейно возрастает от величины 0,4 рад./с до 0,6 рад./с, а пиковые давления возрастают от 16 до 40 МПа.
Список литературы Исследование и обоснование компоновки и параметров гидропривода механизма подъёма лесного манипулятора
- Мазуркин П. М. Автоматизация технологического оборудования лесозаготовительного производства // Технология лесозаготовок и транспорта леса. Л.: ЛТА, 1984. С. 92-97.
- Манипуляторы гидравлические автомобильные МГА-40, ГЛГА-65, МГА-95 // Наиболее важные отечественные и зарубежные достижения в области науки, техники и производства по лесному хозяйству. М.: ВНИИЦлесресурс, 1995. С. 68-69.
- Хуако З. А. Теоретическое обоснование эффективности совмещения движений трёх звеньев // Вестник АГУ. Майкоп, 2011. № 3. С. 24-29.
- Оптимизация параметров гидропривода механизма подъёма манипулятора автосортиментовоза / П. И. Попиков, А. С. Черных, И. В. Четверикова [и др.] // Resources and Technology. 2017. Т. 14, № 4. С. 43-65. URL: http://rt.petrsu.ru/journal/article.php?id=4021. Текст: электронный. EDN: XZXTJR
- Gerasimov Y. Y., Siounev V. S. Harvester crane key parameters: optimization in European Russian Pines // Journal of Forest Engineering. 2000. № 8. P. 65-67.
- Anisimov G. M., Zhendayev S. G., Zhukov A. V. Forest machines: Textbook. Allowance. M.: Forest industry, 1989. 512 p.
- Kuznetsov E. S., Boldin A. P. Technical exploitation of cars: Textbook. For higher education institutions. M.: Nauka, 2001. 535 p.
- Долженко С. В. Разработка методики экспериментальных исследований гидропривода механизма поворота лесного манипулятора сортиментовоза // Лесотехнический журнал. 2013. № 1. С. 127-137. EDN: PHDGYB
- Попиков П. И., Евсиков И. Д. Обоснование компоновки и параметров гидропривода механизма подъёма лесного манипулятора // Актуальные направления научных исследований XXI века: теория и практика. 2019. Т. 7, № 3 (46). С. 226-231. EDN: MFOZIJ
- Chetverikova I., Popikov P., Glushkov S. Improving the efficiency of manipulator-type machines with an improved hydraulic drive // IOP Conference Series: Earth and Environmental Science.International Forestry Forum "Forest Ecosystems as Global Resource of the Biosphere: Calls, Threats, Solutions", 2021. 012055. EDN: CRGXYQ
