Исследование эффективности работы движителя винтового типа в спортивном плавании

Автор: Гречанников В.Н.
Журнал: Физическое воспитание и спортивная тренировка @journal-fvist
Рубрика: Методика и педагогические технологии физического воспитания и спортивной тренировки
Статья в выпуске: 3 (9), 2014 года.
Бесплатный доступ
Методом физического моделирования доказано существенное преимущество так называемого винтового гребка по сравнению с классически механизмом гребка в плавании способом кроль на груди. Ограниченность применения выявленного преимущества связано с особенностями анатомического строения тела человека. Возможны три варианта реализации механизма гребка винтового типа, требующие дальнейших исследований.
Спортивное плавание, техника движений, кроль на груди, гидродинамика, винтовой гребок, подъемные силы, сила тяги
Короткий адрес: https://sciup.org/140125541
IDR: 140125541
The research of screw-type propeller efficiency work in sports swimming
The method of physical simulation proved the significant advantage of so-called screw stroke in comparison with classical mechanism of stroke using crawl technique. The limited application of revealed advantage is connected with peculiarities of human body anatomical structure. There are three variants of the screw-type stroke mechanism requiring further research.
Текст научной статьи Исследование эффективности работы движителя винтового типа в спортивном плавании
Техническая подготовка, осуществляемая спортсменом, преследует цель формирования техники движений, позволяющей с наибольшей эффективностью реализовывать ему свой двигательный потенциал. Поиск рациональных движений, решающих выдвинутую задачу, составляют предмет постоянных усилий исследователей в области техники спортивного плавания.
Исторически сложилось представление о том, что гребок руками в спортивных способах плавания выполняется путем реализации механизма движителя рычажновесельного типа. Осуществляется действие рычага второго рода, когда точки приложения сил (силы тяги и силы сопротивления воды) находятся по одну сторону от точки опоры (плечевого сустава).
В конце 60-х годов прошлого века усилиями Чудовского В.И (1968г.) и Каун-силмена Д. (1969г.) независимо друг от друга было обосновано и получило распространение представление о механизме работы движителя иного типа [1, 2.]. Этот механизм предусматривает создание опорной реакции на дистальных звеньях передних конечностей человека за счет действия, так называемых, подъемных сил, наподобие тех, которые возникают при работе гребного винта.
При вращении винта создание подъемной силы обусловлено действием двух факторов: увеличением скорости движения воды, следовательно, уменьшением давления по закону Бернулли со стороны профиля с более длинным обводом его контура и разрежение среды на стороне гидродинамической тени плоского тела (кисти), двигающегося под некоторым углом к набегающему потоку. Однако, на наш взгляд, условий для проявления первого фактора в практике спортивного плавания не возникает: скорость движения опорной плоскости далека от критической, и профиль сечения кисти существенно отличается от профиля авиа или гидрокрыла. В реальности лишь вторая составляющая подъемной силы обладает способностью вызывать познавательный интерес. Несмотря на то, что применимость нового принципа работы движителя не вызвало возражений среди специалистов в этом виде спорта, считать его осуществимость и эффективность в практике спортивного плавания доказанной не представляется возможным: сказывается недостаточность экспериментальной базы в этом вопросе.
С целью доказательства большей эффективности работы движителя винтового типа по сравнению с движителем рычажно-весельного типа было проведено исследование с применением метода физического моделирования. Физическая модель, построенная для достижения указанной цели, воспроизводила оба механизма работы движителя в чистом виде, то есть функционировала в условиях, исключающих действие случайных факторов.
Она представляла собой тележку в форме рамки, движущейся по направляющим, выполненным из стальных струн, натянутых над поверхностью воды минибассейне для опытов. В средней части рамки крепился электрический двигатель малой мощности, с насаженным на его вал вертикально расположенным стержнем, который передавал вращение через редуктор к горизонтально расположенному валу. К этому валу перпендикулярно прикреплялись два стержня с лопастями круглой формы на концах, разнесенными друг относительно друга на 180 градусов по окружности.
Работающий двигатель через промежуточные кинематические звенья вращал стержни с лопастями, которые, погружаясь по очереди в воду на глубину своего диаметра, создавали упор, приводящий конструкцию в движение по направляющим. Скорость перемещения модели зависела от сочетания двух параметров движения гребущих плоскостей: угла между проекцией относительной траектории гребка на горизонтальную плоскость и направлением движения модели (угол проводки) и угла атаки гребущих плоскостей при повороте их лицевой плоскостью внутрь против часовой стрелки. Оба параметра подвергались регулировке и составляли предмет исследования: определение оптимального сочетания углов проводки и углов атаки плоскостей движителя.
С целью привидения понятия угла атаки к более удобному для восприятия виду в рабочем порядке была введена вспомогательная величина – угол отклонения. Она представляет собой смежный угол численно равный разности между перпендикулярным положением опорной плоскости к потоку воды (90о) и углом атаки. Так углу атаки 80о соответствует угол отклонения 10о, углу атаки 70о, угол отклонения - 20о и т.д.
Исследовались все возможные варианты сочетаний параметров работы движителя за исключением тех, которые противоречили здравому смыслу. В каждом варианте сочетаний проводилось по десять опытов с вычислением средних показателей и коэффициента вариации. Общее количество сочетаний определялось диапазонами исследуемых параметров с дискретнизацией в десять градусов; угол проводки от нуля до сорока градусов (5 позиций) и угол отклонения от нуля до пятидесяти градусов (6 позиций). Итого 300 опытов (5*6*10).
Регистрация времени прохода моделью мерного створного участка осуществлялась автоматически, без участия экспериментатора устройством, состоящим из электрической цепи, включающeй в себя герконы, реле и электрохронометр. С целью исключения влияния начального (разгонного) и финишного отрезков общего пути следования модели створный участок отстоял от краев минибассейна, в котором проводились опыты, на некотором расстоянии. На заключительном этапе математической обработки данные, полученные в исследовании, были приведены к наивысшему показателю, достигнутому при использовании гребка классической схемы, то есть выполняемого по механизму рычажно-весельного типа. Все результаты были представлены в процентах к показателю, полученному в варианте, принятому за эталон: угол проводки ноль градусов, угол атаки девяносто градусов или угол отклонения ноль градусов (вариант 0-0).
Составленный в приведенных единицах гидродинамический профиль наглядно демонстрирует соотношение эффективности работы движителей обоих типов с различными параметрами движения опорной плоскости (Рис.1). Видно, что скорость продвижения физической модели с использованием движителя рычажно-весельного типа ус- тупает, иногда существенно, скорости, достигаемой этой же моделью и приводимой в движение движителем винтового типа. Если учесть, что сопоставление эффективности различных схем создания опорной реакции осуществлялось на участке относительной траектории оптимальной только для движителя рычажно-весельного типа, то анализ показателей в условиях создания движущих сил по всей траектории подводной части цикла создает предпосылки для предположения об еще большем преимуществе движителя винтового типа.
Но и в данном случае наивысшая скорость продвижения модели зафиксирована при реализации варианта со следующими параметрами движения опорной плоскости: угол проводки десять градусов и угол отклонения 30 градусов (вариант 10-30). Скорость прохода составила 112%. С несущественным отставанием оказался вариант «20 – 40». Здесь скорость достигла уровня 111%. Еще в одиннадцати случаях результаты оказались выше уровня 100 процентов - показателя, зарегистрированного в варианте, принятом за эталон. Обращает на себя внимание также и то, что почти все кривые оказались выше линии, обозначающей результаты с применением классической схемы гребка. Это положение наблюдается в большинстве случаев всего диапазона значений углов проводки. Все эти наблюдения самым выразительным образом свидетельствуют о бесспорном преимуществе гребка, имеющего винтообразный (шнекообразный) характер.
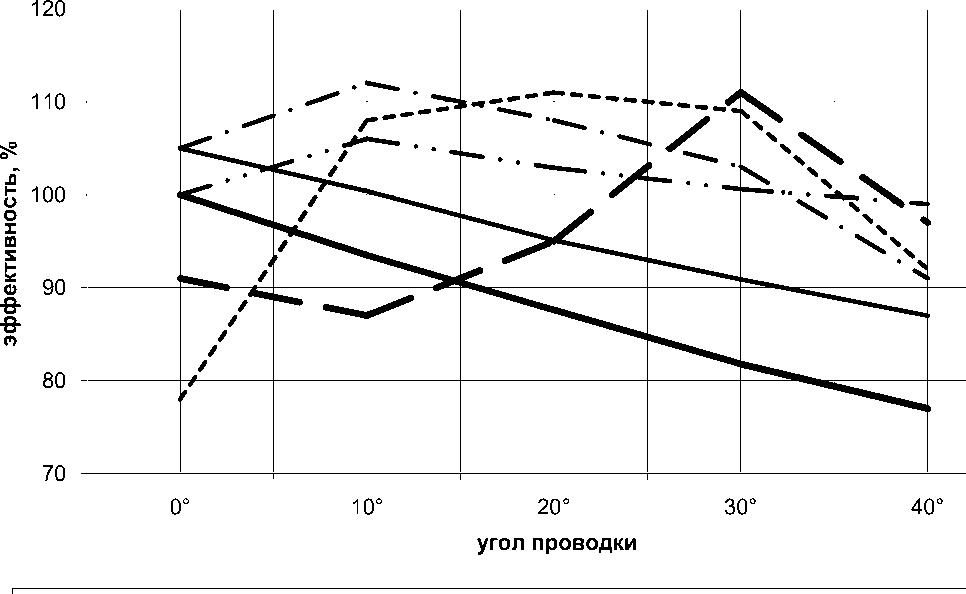
Рис.1. Эффективность работы движителя с различными параметрами компонентов опорной реакции
Таким образом, результаты проведенного исследования позволяют считать доказанным положение о том, что движитель винтового типа обладает существенными преимуществами по сравнению с движителем рычажно-весельного типа, который используется в движениях рук при плавании большинством спортивных способов.
В специальной литературе по плаванию, изданной после 1968 года, указывается на целесообразность выполнения гребка руками, в частности в кроле на груди, по зигзагообразной траектории, предполагая прямо или по умолчанию использование эффекта образования подъемных сил в качестве движущей силы. Однако, при анализе внут-рицикловой скорости на участке относительной траектории, где кисть движется с косо направленным соскальзыванием внутрь, вместо ожидаемого прироста скорости нередко наблюдается ее западение или, как минимум, стабилизация графика без выраженного его подъема. Можно предположить, что участок траектории слишком короткий, чтобы сделалось возможным проявление действия подъемных сил в условиях лимита времени. Следовательно, необходимы поиски таких движений, которые бы в максимальной степени могли использовать особенности двигательного аппарата человека в решении задачи реализации более эффективного механизма создания опорной реакции при плавании. Другими словами, предстоит решение задачи наиболее полного использования резервов, содержащихся в выявленных 10-12% преимущества схемы движений рук винтового типа.
Возможны три варианта такой реализации в плавании способом кроль на груди.
-
1. Плавание с одновитковой проводкой (винтовой шаг равен длине двух рук).
-
2. Плавание с двухвинтовой проводкой (винтовой шаг равен длине одной руки).
-
3. Плавание с двухвинтовой проводкой опорной плоскости, состоящей из системы «кисть-предплечье» (укороченный винтовой шаг).
Каждый вариант плавания содержит свои положительные стороны и недостатки, и выявление лучшего из них, а, возможно, и предложение иной схемы движений, ждет своих исследователей.
Схема организации движений с максимальным использованием подъемных сил для создания силы тяги неизбежно выдвигает некоторый набор признаков, отличающий предполагаемый гипотетический способ плавания от сложившихся спортивных способов:
-
• отсутствие фаз в подводной части цикла движений руками, поскольку на всех участках траектории создается опорная реакция;
-
• радикально изменяется функция ног как одного из компонентов техники спортивного плавания: минимизируется их продвигающая функция, сохраняется балансировочная, появляется новая - кренообеспечивающая или креностимулирующая функция.
-
• отпадает необходимость в сгибании рук в локтевых суставах кроме варианта, в котором в роли опорной плоскости выступает система « кисть-предплечье».
Выдвинутые варианты нового гипотетического способа плавания заслуживают того, чтобы оказаться объектом специальных исследований по выявлению их эффективности. Даже если эти усилия приведут к отрицательному результату, их положительная роль может проявиться в стимулировании поисков специалистов в обосновании двигательных действий, способных эффективно использовать преимущества движений винтового типа. В этом видится ближайший резерв роста спортивных результатов в плавании вольным стилем.
Список литературы Исследование эффективности работы движителя винтового типа в спортивном плавании
- Бутович, Н.А. Кроль -быстрейший способ плавания/Н.А. Бутович, В.И. Чудовский. -М: Изд-во «ФиС», 1968. -126c.
- Counsilman J.E. The Role of Sculling Movements in the Arm Pull. 1969, «Swimming World», Vol.X No 12, p.10-13.
