Исследование эффективности существующих навигационных систем

Автор: Куцев М.А.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 9-2 (96), 2024 года.
Бесплатный доступ
Рассматриваются важные достижения и технические тенденции в области навигационных систем. В частности, интеграция Глобальной системы позиционирования (GPS) и инерциальной навигации стала важным достижением в современной навигации. В обзоре также рассматриваются анализ, исследование, оценка эффективности существующих интегрированных навигационных систем с точки зрения точности, производительности, низкой стоимости и всех аспектов, которые помогают оптимизировать эффективность их эксплуатации.
Навигация, инерционные навигационные системы, позиционирование, эффективность
Короткий адрес: https://sciup.org/170207142
IDR: 170207142 | DOI: 10.24412/2500-1000-2024-9-2-118-121
Study of the efficiency of existing navigation systems
The article discusses important achievements and technical trends in the field of navigation systems. In particular, the integration of the Global Positioning System (GPS) and inertial navigation has become an important achievement in modern navigation. The review also discusses the analysis, research, and performance evaluation of existing integrated navigation systems in terms of accuracy, performance, low cost, and all aspects that help optimize their operational efficiency.
Текст научной статьи Исследование эффективности существующих навигационных систем
За последние четыре десятилетия наблюдается экспоненциальный рост использования инерциальных технологий для удовлетворения военных и гражданских потребностей в воздушной и наземной навигации. В последние годы наблюдается рост интереса к инерциальным навигационным системам (ИНС) аналитического типа, главным образом в связи с появлением быстрых и относительно недорогих микропроцессоров [1]. С начала 1960-х годов современная навигация использует гибридные (интегрированные) навигационные системы, в которых различные электронные чувствительные устройства (сенсоры) используются для сбора информации, необходимой для определения “непрерывного” местоположения управляемого транспортного средства и уменьшения ошибок инерциальных датчиков. Разработаны интегрированные системы, объединяющие несколько независимых навигационных датчиков, таких как инерциальный измерительный блок, доплеровский радар и устройств. Рассмотрим и сравним производительности и эффективность GPS, ИНС и интегрированных навигационных систем GPS/ИНС.
Инерциальная навигационная система
Малогабаритные и недорогие инерциальные навигационные системы исполь- зуются во многих областях применения, таких как персональная навигация, автомобильная навигация, беспилотные летательные аппараты (БПЛА) и авиация общего назначения. Достижения в области волоконно-оптических гироскопов и мик-роэлектромеханических систем (MEMS) обещают многообещающие перспективы в развитии таких систем [2]. По сравнению с системами более высокого класса, недорогие ИНС могут давать большие ошибки в определении местоположения и ориентации за короткие промежутки времени. В основном это связано с большими погрешностями в выходных данных датчиков, и поэтому ИНС, построенные на основе этих датчиков, подвержены нелинейным ошибкам, особенно когда ошибки ориентации становятся очень большими. Если повысить точность недорогого ИНС, то можно снизить затраты в существующих приложениях и создать новые приложения.
В работе [3] был использован новый метод калибровки в полевых условиях, который был разработан и успешно протестирован. С помощью информации о калибровке акселерометра можно было устранить почти половину погрешности позиционирования. Все компоненты ориентации сходились в течение трех минут при среднеквадратичных неголономных ограничениях 0,030, что значительно уменьшало погрешность горизонтального позиционирования с точностью до 40 м за 20 минут работы. Таким образом, недорогая ИНС может использоваться в качестве автономной системы определения местоположения во время перерывов в работе GPS более чем на 10 минут.
В работе [4] рассмотрена разработка и внедрение встроенной ИНС, использующей инерциальный измерительный блок (IMU), цифровой компас, GPS и встроенную компьютерную систему. ИНС была способна обеспечивать непрерывную оценку местоположения и ориентации транспортного средства. Как правило, IMU – это очень дорогие системы, однако в этой ИНС будут использоваться «недорогие» компоненты. К сожалению, низкая стоимость приводит к низкой производительности, что является основной причиной включения в систему GPS, компаса и фильтрации по Калману. Таким образом, IMU будет использовать акселерометры и гироскопы для интерполяции между позициями GPS с частотой 1 Гц. Выходное уравнение акселерометра получено для связи линейного и углового движений твердого тела относительно неподвижной инерциальной системы отсчета. Задано достаточное условие для определения того, возможна ли конфигурация акселерометров. Если условие выполнено, угловое и линейное перемещения могут быть вычислены раздельно с использованием двух несвязанных уравнений динамической системы ввода–вывода: уравнения состояния для угловой скорости и выходного уравнения для линейного ускорения. Проанализировано влияние ошибок определения местоположения акселерометра и его ориентации. Разработаны алгоритмы, которые выявляют и компенсируют эти ошибки.
Глобальная система позиционирования (GPS)
Глобальная система позиционирования, или GPS, была разработана с целью обеспечения точного позиционирования и навигации в любом месте на поверхности Земли или вблизи нее. В дополнение к американской системе GPS NAVSTAR, была создана российская система ГЛО-
НАСС и китайская Бэйдоу. Другие подобные системы находятся в стадии проектирования. Ключевым измерением является время прохождения сигналов GPS от конкретного космического аппарата до навигационного приемника. Точность навигации может составлять порядка десятых долей метра, а точность на сантиметровом уровне также может быть достигнута с помощью специальных методов улучшения. В последние годы космические аппараты используют GPS для навигации на орбите. Поскольку приемник является твердотельным, надежным, маломощным и дешевым, GPS для автономной навигации будет востребован даже на недорогих космических аппаратах небольшой сложности.
Cравнение производительности двух популярных алгоритмов грубой обработки данных, метода суммирования дисперсий (VSM) и метода соотношения мощностей, с точки зрения их оценок было проведено в 1) аддитивном белом гауссовом шуме (AWGN), 2) узкополосные непрерывные волновые помехи (CWI), 3) их реакция на эффекты квантования и насыщения и 4) динамический диапазон [5]. Алгоритмы были реализованы в составе программного приемника. Рассмотрены два набора GPS-данных L1; один был получен из системы сбора необработанных данных GPS, а другой – из имитатора сигнала GPS. Собранный набор был сохранен с почти постоянным отношением сигнал/шум C/N 0 , в то время как смоделированный набор содержал переменные уровни C/N 0 . Влияние добавления AWGN на оценку C/N 0 было прямо пропорционально мощности шума. VSM показал хорошее отслеживание при высоких уровнях C/N 0 и лучшую устойчивость к ограниченным уровням квантования.
Первоначально были проведены полевые испытания двух различных GPS-приемников в условиях городского каньона и листвы, чтобы оценить эффективность определения местоположения каждого приемника. Затем были разработаны тестовые сценарии для многоканального имитатора спутникового сигнала GPS, чтобы создать контролируемые и воспро- изводимые сигналы для приемников GPS. В сценариях учитываются фактические спутниковые группировки на тот же день, время и места сбора полевых данных. Количественные результаты продемонстрировали хорошую корреляцию между результатами, полученными с использованием разработанных сценариев тестирования, и результатами полевых испытаний. Предлагаемая методология позволит сократить затраты на валидацию и время вывода на рынок.
Интеграция GPS/ИНС
Интеграция GPS с инерциальной навигационной системой повышает качество и целостность каждой навигационной системы: использование GPS позволяет откалибровать погрешности инерциальных приборов, а ИНС можно использовать для улучшения характеристик отслеживания и повторного получения данных GPS-приемником [6]. Существует два метода калибровки ошибок, которые могут быть реализованы в интегрированной системе GPS/ИНС: метод прямой связи (или разомкнутого контура) и метод обратной связи (или замкнутого контура), как показано на рисунке (1).
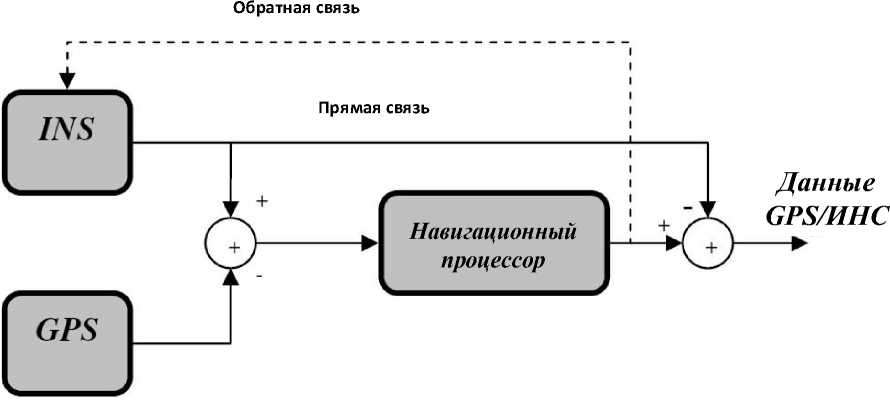
Рис. 1. Концепция инерционного вспомогательного средства
Кроме того, существует два основных типа методов интеграции данных GPS и ИНС в систему. Это слабо связанные и тесно связанные методы. Навигационный процессор внутри GPS-приемника вычисляет местоположение и скорость, используя только наблюдаемые данные GPS. Внешний навигационный фильтр вычисляет местоположение, скорость и ориентацию на основе необработанных измерений инерциального датчика и использует данные GPS о местоположении и скорости для калибровки ошибок ИНС. Преимущество слабосвязанной системы заключается в том, что GPS-приемник можно рассматривать как «черный ящик». Смешанный навигационный фильтр упрощается, если использовать предварительно обработанные GPS-данные о местоположении и ско- рости. Однако, если происходит сбой в работе GPS, GPS перестает выдавать обработанные измерения, и калибровка инерциального датчика с помощью фильтра GPS/ИНС также прекращается.
Выводы
Для определения местоположения используются две основные навигационные системы: глобальная система позиционирования (GPS) и бесплатформенная инерциальная навигационная система, каждая из которых имеет свои сильные и слабые стороны. GPS требует наличия прямой видимости между приемником и спутником, которую не всегда можно обеспечить, отсутствия ориентации, информации и проблем с помехами во время навигации (начальное положение, скорость и сила тяжести земли), а его точность со време- нем ухудшается. В целом, интеграция GPS/ИНС обеспечивает надежные навига- ционные решения, устраняя все их недостатки, включая блокировку сигнала GPS и увеличение ошибок определения местоположения с течением времени для ИНС. Большинство существующих навигационных систем используют фильтрацию Кал-мана для объединения данных GPS и ИНС.
Методы интеграции GPS/ИНС с фильтрацией Калмана имеют некоторые недостат- ки, связанные с моделями стохастических ошибок инерциальных датчиков, помехоустойчивостью и повторяемостью. Таким образом, ожидается, что интеграция GPS и ИНС получит более широкое распространение в результате появления недорогих инерциальных датчиков.
Список литературы Исследование эффективности существующих навигационных систем
- Доросинский Л.Г., Богданов Л.А. Основы и принципы построения инерциальных навигационных систем // Современные проблемы науки и образования. - 2014. - № 5. - С. 151-151. EDN: SZVJVZ
- Коркишко Ю.Н. и др. Бесплатформенные инерциальные навигационные системы на основе волоконно-оптических гироскопов // Гироскопия и навигация. - 2014. - Т. 1. - № 84. - С. 14-25. EDN: RZCUDH
- Eldesoky A. et al. Real time localization solution for land vehicle application using low-cost integrated sensors with GPS //Journal of applied research and technology. - 2020. - Т. 18. - № 4. - С. 214-228.
- Blocher L. et al. Purely inertial navigation with a low-cost MEMS sensor array //2021 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL). - IEEE, 2021. - С. 1-4.
- Sharawi M.S., Akos D.M., Aloi D.N. GPS C/N/sub 0/estimation in the presence of interference and limited quantization levels // IEEE transactions on aerospace and electronic systems. - 2007. - Т. 43. - № 1. - С. 227-238.
- Gautier J.D., Parkinson B.W. Using the GPS/INS generalized evaluation tool (GIGET) for the comparison of loosely coupled, tightly coupled and ultra-tightly coupled integrated navigation systems // Proceedings of the 59th Annual Meeting of the Institute of Navigation and CIGTF 22nd Guidance Test Symposium (2003). - 2003. - С. 65-76.
