Исследование кинематики манипулятора параллельной структуры (дельта-механизма)
")
Автор: Мирзаев Р.А., Смирнов Н.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (44), 2012 года.
Бесплатный доступ
Рассмотрена кинематика манипулятора с параллельной структурой - дельта-механизма. Аналитически решена прямая задача кинематики манипулятора. Проведена проверка полученного решения с помощью трехмерного моделирования. Найдены крайние положения манипулятора и область рабочей зоны.
Прямая задача кинематики, рабочая зона, дельта-механизм, устройства параллельной кинематики, манипуляторы
Короткий адрес: https://sciup.org/148176916
IDR: 148176916 | УДК: 621.01
Research of kinematics of manipulator with parallel structure (delta mechanism)
The article considers kinematics of manipulator with parallel structure. Direct kinematic problem of manipulator solved analytically. The obtained solution verified with the help of three-dimensional simulation of the mechanism. Limit positions of the manipulator and operating are zone are defined.
Текст научной статьи Исследование кинематики манипулятора параллельной структуры (дельта-механизма)
В некоторых областях техники перспективным является применение роботов-манипуляторов на основе механизмов параллельной кинематики, используемых при механической обработке изделий сложной формы (например, штампов, пресс-форм, лопаток турбин и т. д.), когда требуется перемещение инструмента по пятишести координатам.
В отличие от традиционных манипуляторов, структуры с параллельной кинематикой содержат замкнутые кинематические цепи и воспринимают нагрузку как пространственные фермы [1], т. е. звенья этих механизмов работают на растяжение и сжатие, что обеспечивает жесткость всей конструкции и, как следствие, повышение точности позиционирования схвата [2].
Достоинствами манипуляторов, построенных на основе параллельных механизмов, являются большая точность и жесткость, высокие рабочие нагрузки [3].
Среди недостатков этих манипуляторов следует отметить использование большого количества приводов и более сложных систем управления, меньший размер рабочей области и высокую стоимость, сложность в проектировании. Однако эти недостатки не являются препятствием для распространения параллельных манипуляторов в тех областях, где требуется точное позиционирование, высокие нагрузки и маневренность [3].
Математические и имитационные модели кинематики и динамики некоторых параллельных механизмов, а также задача оптимизации их формы и размеров рассматривались в [4].
Трехмерное моделирование кинематически сложных механизмов целесообразно выполнять с помощью системы автоматизированного проектирования (САПР) CATIA, в которой используются алгоритмы моделирования движения кинематически сложных механизмов, таких как устройства параллельной кинематики. Для решения систем уравнений, описывающих положение устройства параллельной структуры, наиболее подходящим является программный пакет Maple – система компьютерной алгебры, позволяющая решать сложные системы уравнений как в численном, так и в символьном виде. В работе [5], в которой рассматривались особенности динамики манипуляторов параллельной структуры и переходные процессы, для расчета параметров управления приводами механизмов применялся программный комплекс MATLAB/Simulink.
Постановка задачи. Рассмотрим устройство параллельной кинематики – дельта-механизм (рис. 1), включающий в себя основание, образованное точками 3 , 6 , 9 , верхнюю платформу, на движение которой накладывают ограничения три кинематические цепи: 1 – 2 – 3 , 4 – 5 – 6 , 7 – 8 – 9 . В точках 1 , 2 , 4 , 5 , 7 , 8 установлены поворотные шарниры с одной вращательной степенью свободы, в точках 3 , 6 , 9 – сферические шарниры с тремя вращательными степенями свободы. Основание и поворотная платформа представляют собой равносторонние треугольники.
Введем следующие обозначения элементов дельтамеханизма (см. рис. 1):
-
- x ij , y ij , z ij – координаты i -й точки в j -й системе координат;
-
- l i – длина i -го звена, во всех кинематических цепях l 1 = 37 мм, l 2 = 58 мм;
-
- φ ij – угол i -го шарнира в j -й кинематической цепи;
-
- δ i – угол между первой системой координат i -й кинематической цепи и базовой системой координат, δ 1 = 330°, δ 2 = 210°, δ 3 = 90°;
-
- E – расстояние между сферическими шарнирами 3 , 6 , 9 дельта-механизма, E = 60 мм;
-
- F – расстояние от начала базовой системы координат до поворотных шарниров 1 , 4 , 7 , F = 60 мм;
-
- R – расстояние от полюса схвата P до сферических шарниров 3 , 6 , 9 , R = 34,641 мм;
-
- Х 0 Y 0 Z 0 – базовая система координат;
-
- Х 1 Y 1 Z 1 – первая система координат.

Рис. 1. Общий вид дельта-механизма (обозначения см. в тексте)
Решение прямой задачи кинематики. Прямая задача кинематики манипуляторов применительно к дельта-механизму сводится к нахождению координат поворотной платформы при заданных длинах звеньев l 1 , l 2 и углов поворотов шарниров φ 11 , φ 21 , φ 12 , φ 22 , φ 13 , φ 23 (рис. 2).
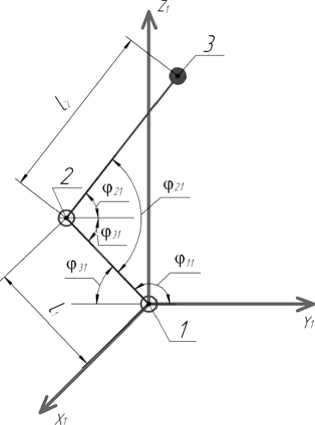
Рис. 2. Определение положения точек 2 и 3 в первой системе координат
Для решения этой задачи сначала находят координаты сферического шарнира (точки 3) в первой системе координат X1Y1Z1, а затем с помощью переноса на расстояние F и поворота на угол δ переходят к базовой системе координат X0Y0Z0. Аналогично определяют координаты остальных сферических шарниров – точек 6, 9, которые вместе с точкой 3 задают плоскость поворотной платформы (рис. 3). По уравнению этой плоскости можно найти углы ее наклона в базовой системе координат X0Y0Z0, а также высоту полюса схвата.

Рис. 3. Схема положения плоскости поворотной платформы в базовой системе координат
В первой системе координат X1Y1Z1 координаты точки 3 определяются по уравнениям x31 = 0,
• У 31 = l i
z 31 = 1 1
■ cos ( фп ) + 1 2 ■ cos ( ф 21 + фп - 180 ° ) ,
■ sin ( ф 11 ) + 1 2 ■ sin ( ф 21 +ф 11 - 180 ° ) .
При переходе от первой системы координат X 1 Y 1 Z 1 , связанной с кинематической цепью 1 – 2 – 3 , к базовой системе X 0 Y 0 Z 0 следует выполнить перенос на расстояние F и поворот на угол δ (см. рис. 1). Для уравнений координат точки 3 этот угол равен углу δ 1 , т. е. 330°:
x 30 = ( 1 1 ■ cos ( ф 11 ) + 1 2 ■ cos ( ф 21 +фц - 180 ° ) - F )sin ( S 1 ) , У 30 = ( 1 1 ■ cos ( ф 11 ) + 1 2 ■ cos ( ф 21 +фц- 180 ° ) - F )cos ( 5 1 ) , z 30 = 1 1 ■ sin ( ф 11 ) + 1 2 ■ sin ( ф 21 +ф 11 - 180 ° ) .
Аналогично находят координаты точки 6 в базовой системе координат X 0 Y 0 Z 0 :
•
x 60 = ( 1 1 ■ cos ( ф 12 ) + 1 2 ■ cos ( ф 22 +ф 12 - 180 ° ) - F )sin ( 5 2 ) , У 60 = ( 1 1 ■ cos ( ф 12 ) + 1 2 ■ cos ( ф 22 +ф 12 - 180 ° ) - F )cos ( 5 2 ) , z 60 = 1 1 ■ sin ( ф 12 ) + 1 2 ■ sin ( ф 22 +ф 12 - 180 ° ) .
Координаты точки 9 в базовой системе координат X 0 Y 0 Z 0 задаются уравнениями
•
x 90 = ( 1 1 ■ cos ( ф 13 ) + 1 2 ■ cos ( ф 23 +ф 13 - 180 ° ) - F )sin ( 5 3 ) , y 90 = ( 1 1 ■ cos ( ф 13 ) + 1 2 ■ cos ( ф 23 +ф 13 - 180 ° ) - F )cos ( 5 3 ) , z 90 = 11 ■ sin ( ф 13 ) + 1 2 ■ sin ( ф 23 + ф 13 - 180 ° ) .
Поворотная платформа представляет собой равносторонний треугольник с вершинами 3 , 6 , 9 . Зная координаты этих точек, можно найти уравнение плоскости поворотной платформы, а затем и координаты нормали N в базовой системе координат.
Уравнение плоскости поворотной платформы записывается следующим образом:
A · x + B · y + C · z + D = 0.
По координатам трех точек 3 , 6 , 9 получают коэффициенты уравнения плоскости верхней платформы:
A = y 30 ( z 60 – z 90 ) + y 60 ( z 90 – z 30 ) + y 90 ( z 30 – z 60 ),
B = z 30( x 60 – x 90) + z 60( x 90 – x 30) + z 93( x 33 – x 60),
C = x 30( y 60 – y 90) + x 60( y 90 – y 30) + x 90( y 30 – y 60),
–D = x30(y60 · z90 – y90 · z60) + x60(y90 · z30 – y30 · z90) + + x90(y30 · z60 – y60 · z30), где коэффициенты A, B, C – координаты вектора нормали N к плоскости поворотной платформы 3, 6, 9 (см. рис. 3). Направляющие косинусы вектора N относительно базовой системы координат X0Y0Z0 рассчитывают по формулам
|
cos a = |
A |
||
|
A 2 |
+ B в |
+ C 2 |
|
|
cos P = |
B |
||
|
A 2 |
+ B B |
+ C в |
|
|
cos y = |
C |
||
|
A 2 |
+ B B 2 |
+ C в |
|
За обобщенные координаты поворотной платформы приняты два: угла α, β – и высота полюса схвата Z P . Третий из углов наклона плоскости поворотной платформы γ не следует включать в обобщенные координаты, поскольку положение плоскости в пространстве однозначно определено двумя углами и высотой. Кроме того, число степеней свободы дельтамеханизма, вычисленное по формуле Чебышева– Малышева, равно трем [5], а число обобщенных координат должно быть равно числу степеней свободы механизма. Координату Z P вычисляяют как среднее арифметическое координат Z трех точек, так как треугольник, образованный точками 3 , 6 , 9 , является равносторонним:
ZP =
z 30 + z 60 + z 90
Результаты решения прямой задачи кинематики манипулятора параллельной структуры представлены в таблице.
Координаты поворотной платформы
|
Координаты схвата в базовой системе координат X 0 Y 0 Z 0 |
Координаты, определенные в САПР CATIA |
Координаты, рассчитанные аналитически в пакете Maple |
Отклонение, % |
|
α |
85,131° |
85,011° |
0,14 |
|
β |
103,493° |
103,514° |
–0,02 |
|
γ |
14,376° |
14,437° |
–0,42 |
|
Z P |
85,587 мм |
85,574 мм |
0,02 |
Определение рабочей зоны манипулятора. Допустимые значения координат положения верхней платформы Z P , α, β определяются следующими параметрами механизма:
-
– длиной звеньев l 1 , l 2 ;
-
– максимальным и минимальным углами поворота сферических шарниров: по оси Х – θ max , θ min , по оси Y – ω max , ω min ;
-
– максимальным и минимальным углами поворота сферических шарниров φ 12max , φ 12min .
Определить максимальные углы наклона платформы в базовой системе координат α и β, высоту полюса схвата Z P , а также зависимость между ними можно с помощью трехмерной модели дельтамеханизма (рис. 4).
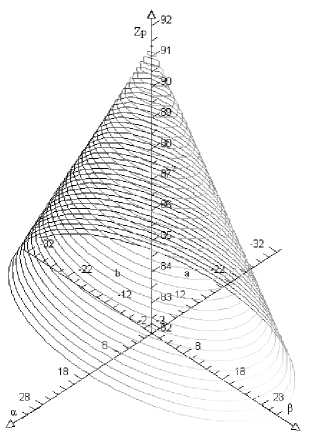
Рис. 4. Рабочая зона дельта-механизма
В ходе экспериментов с трехмерной моделью получена область рабочей зоны механизма – конус с эллиптическим основанием, описываемый уравнением
Z P =- 8,814
I a 2
16,5412
■ '■■
31,1182
+ 91,4.
Таким образом, при помощи трехмерного моделирования определена рабочая зона механизма – это конус с эллиптическим сечением. При максимальной высоте Z P поворот платформы невозможен. Снизу рабочая зона ограничена максимальными углами поворота шарниров 1 , 4 , 7 , а также длинами l 1 , l 2 .
Авторами представлены трехмерная модель манипулятора с параллельной структурой – дельтамеханизма – и аналитическое решение прямой задачи кинематики этого манипулятора. Проверка вычисленных координат поворотной платформы показала правильность полученного решения. С помощью трехмерной модели дельта-механизма также найдена рабочая зона манипулятора.
Полученные результаты могут быть использованы при проектировании аналогичных манипуляторов.
