Исследование оптического щупа с частично когерентным источником излучения

Автор: Большаков О.П., Котов И.Р., Майоров Е.Е., Хопов В.В.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: 300 лет Санкт-Петербургу. Материалы XXXII конференции СПБГИТМО (ТУ)
Статья в выпуске: 2 т.13, 2003 года.
Бесплатный доступ
В работе проведен анализ работы оптического щупа с частично когерентным источником излучения при исследовании поверхности сложной формы в триггерном режиме. Предложен способ минимизации влияния спекл-модуляции интерференционного сигнала на результат измерений. На основе предложенного способа разработано устройство со сканированием опорного зеркала по периодическому закону. Определены соотношения между основными параметрами устройства, необходимые для достижения положительного эффекта.
Короткий адрес: https://sciup.org/14264285
IDR: 14264285 | УДК: 681.23:
Investigation of the optical probe with partial coherence illumination
The optical probe with partial coherence illumination for analysis of rough surfaces has been studied. A method to minimize the influence of speckle-modulation is proposed. The proposed method is used to develop a device with scanning reference mirror.
Текст научной статьи Исследование оптического щупа с частично когерентным источником излучения
Оптические методы измерений находят широкое применение при контроле геометрических параметров объектов. Такое внимание к ним обусловлено прежде всего высокой точностью измерений и отсутствием предметных связей с изучаемым объектом. За последние 10–12 лет в оптическом приборостроении повышенный интерес проявляется к измерительным системам, в которых используются источники излучения с низкой вре-меннóй когерентностью [1–4]. Работа этих систем основана на регистрации контраста интерференционного поля в отличие от классических интерферометрических устройств, где искомая информация содержится в фазовых характеристиках интерференционной картины [5].
Когерентноограниченные интерферометрические устройства в последнее время успешно применяются в научных исследованиях и в условиях производственного контроля. Однако, несмотря на определенные успехи в практическом использовании, остаются нерешенными многие вопросы построения и эксплуатационных характеристик этих систем, отсутствуют какие-либо данные метрологии неплоских поверхностей.
Рис. 1. Схема реализации когерентноограниченного метода контроля поверхности на основе интерферометра Майкельсона.
S — источник излучения, D — фотодетектор, 1 — светоделитель, 2 — объект, 3 — опорное зеркало
ОПТИЧЕСКИЙ ЩУП
Ключевым устройством оптических щупов является оптическая измерительная головка. Основной функциональный элемент измерительной головки — интерферометр Майкельсона (рис. 1). В качестве источника излучения используется суперлюминесцентный диод с длиной волны излучения 0.83 мкм и длиной когерентности 30 мкм.
Измерение рельефа поверхности с использованием когерентноограниченного излучения основа- но на зависимости контраста интерференционного поля от разности хода Δ = OM – ON (рис. 1) интерферирующих пучков. Возможны два способа модуляции последней: изменением оптической длины опорного плеча OM; изменением оптической длины объектного плеча ON. Указанные способы компенсационного изменения разности хода интерферирующих пучков лежат в основе построения оптических щупов двух типов: сканирующего и триггерного соответственно.
В триггерном режиме измерений модуляция разности хода производится за счет механического перемещения оптической измерительной головки относительно контролируемой поверхности. В общем случае это перемещение имеет сложный характер. Поэтому наряду с чисто модуляционной компонентой — изменением оптической длины объектного плеча интерферометра — присутствует и поперечная компонента движения, которая приводит к случайному изменению картины спекл-интерференционного поля за время одного измерения и, следовательно, к ошибке измерения.
Работа оптического щупа предполагает наличие координатно-измерительного устройства с возможностью перемещения по трем координатным осям X , Y , Z . Для каждой i -й зондируемой точки поверхности с координатами xi ,, yi величина ∆ zi определяется не перемещением опорного зеркала, а перемещением непосредственно измерительной головки по направлению к поверхности объекта вдоль оси Z (рис. 2). Оптическая измерительная головка выполняет функции индикатора нулевой разности хода, а вся информация о функции поверхности ∆ z i = f ( x i , y i ) снимается с показаний координатно-измерительного устройства.
а
б
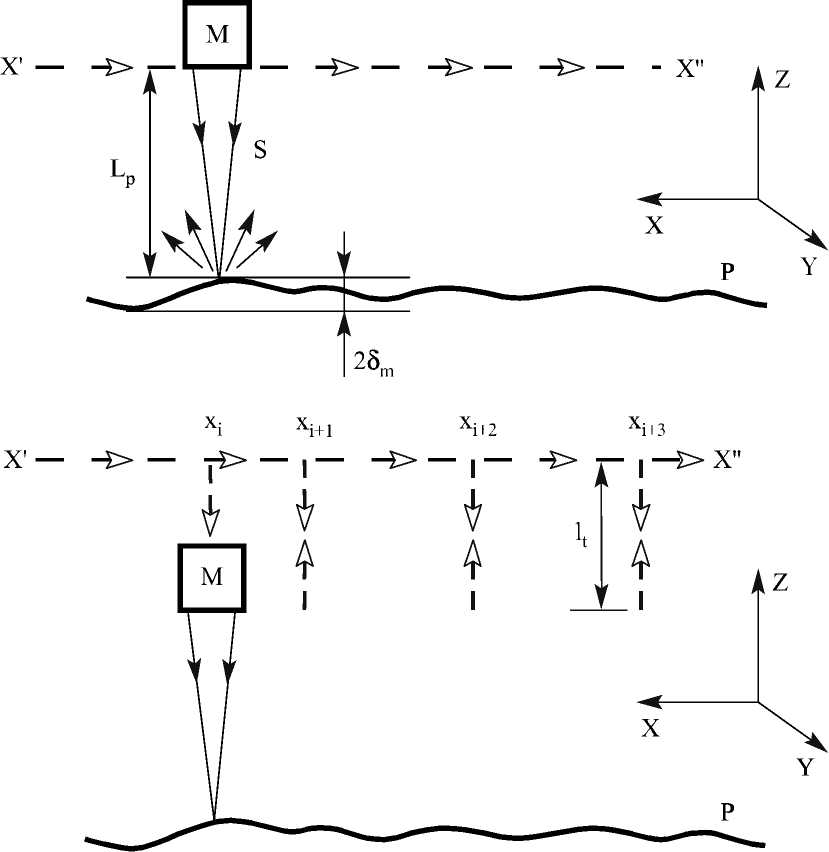
Рис. 2. Режимы измерений рельефа поверхности с помощью оптического щупа: а — сканирующий, б — триггерный.
М — оптическая измерительная головка, Р — контролируемая поверхность, S — зондирующий пучок, X'X" — траектория движения измерительной головки
МИНИМИЗАЦИЯ ВЛИЯНИЯ СПЕКЛ-МОДУЛЯЦИИ НА РЕЗУЛЬТАТЫ ИЗМЕРЕНИЙ
Декорреляция спекл-полей, формирующих интерференционный сигнал при наклонном зондировании поверхности, вызывает деформацию формы выходного сигнала случайной модуляцией и увеличение его длительности. Эти факторы ухудшают точность измерений.
Интерференционное поле в плоскости регистрации является результатом суперпозиции регулярного фронта опорной волны и спекл-модулированной объектной. В оптическом щупе неподвижно опорное зеркало, модуляция оптической разности хода происходит за счет движения самого щупа относительно объекта. Следовательно, при наличии поперечной компоненты смещения щупа относительно поверхности происходит изменение картины спекл-интерференционного поля.
На представленной на рис. 2 схеме функционирования оптического щупа изображен идеализированный вариант геометрии измерения: поверхность объекта квазиплоская; траектория движения оптической измерительной головки лежит в плоскости, причем последняя параллельна поверхности объекта; движение измерительной головки, модулирующее оптическую разность хода, совпадает с направлением зондирующего луча, а сам луч перпендикулярен поверхности объекта. На практике в общем случае контролируемая поверхность имеет сложную геометрическую форму. Поэтому наряду с чисто модуляционной компонентой — изменением оптической длины объектного плеча — присутствует и поперечная компонента движения, приводящая к перемещению зондирующего пятна по поверхности объекта. Существует хорошо известное правило при разработке способов противодействия влиянию спекл-модуляции: спеклы "боятся" статистики. Поэтому для общего решения указанной проблемы предлагается следующее: увеличение числа независимых измерений с последующим их усреднением [6].
ДОПОЛНИТЕЛЬНАЯ МОДУЛЯЦИЯ РАЗНОСТИ ХОДА. ОПТИМИЗАЦИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ
Изменение контраста интерференционного поля обусловлено модуляцией разности хода вследствие перемещения измерительной головки. В общем случае при наличии поперечной компоненты движения зондирующего излучения по поверхности объекта происходит изменение картины спеклов в плоскости регистрации. Скорость этого изменения определяется скоростью поперечного перемещения луча по поверхности. Если резко увеличить скорость съема информации таким образом, что спеклы в плоскости регистрации за время одного измерения окажутся "заморожены", будем считать задачу решенной. За время относительно медленного приближения измерительной головки к поверхности объекта при значительном увеличении скорости съема информации необходимо произвести несколько независимых измерений расстояния до поверхности и затем усреднить их.
Для реализации этого способа вводится дополнительная модуляция разности хода за счет сканирования опорного зеркала. Требования к параметрам сканирования можно представить в виде
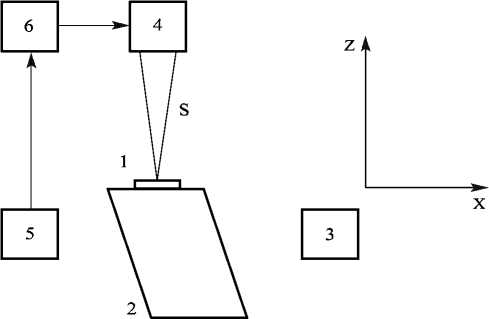
Рис. 3. Схема экспериментальной установки.
1 — объект; 2 — параллелограммный механизм; 3 — возбуждающий генератор; 4 — оптический щуп; 5 — датчик скорости; 6 — компаратор; S — зондирующий пучок
ll
— << —
V
V t
,
V >> V x ,
где loz — амплитуда сканирования опорного зеркала; V — скорость сканирования опорного зеркала; lt — расстояние, на которое смещается измерительная головка за один проход (для схемы на рис. 1 величина lt совпадает с изменением длины объектного плеча интерферометра); Vt — скорость изменения оптической длины объектного плеча; Vx — скорость поперечного смещения зондирующего пятна по поверхности объекта.
При выполнении условий (1), во-первых, за один проход измерительной головки удастся произвести несколько независимых измерений; во-вторых, во время одного измерения спеклы в плоскости регистрации окажутся "заморожены".
Схема проведения экспериментальных исследований приведена на рис. 3. Диффузно отражаю-
щий объект 1 установлен на параллелограммном механизме 2. Колебания механизма возбуждаются генератором 3. На схеме движение объекта происходит вдоль оси X . Измерение расстояния до объекта производится оптическим щупом 4. Для вычисления среднеквадратического отклонения бралось 20 независимых измерений. Важное условие проведения эксперимента — обеспечить идентичность положений объекта и его скорости для каждого из этих 20 измерений. С этой целью в экспериментальном макете использовался датчик скорости 5, образованный из электромагнитной катушки и постоянного магнита, закрепленного на параллелограммном механизме. Компаратор 6 позволяет выделять моменты времени, характеризуемые максимальной скоростью движения объекта V x , max . Для этих моментов компаратор формирует разрешающий сигнал для выдачи информации оптическим щупом.
Таким образом, измерение расстояния до объекта производится в моменты максимальной скорости его движения. Поскольку движение объекта происходит по гармоническому закону x = xm sin 2πνt, (2)
оценка максимальной скорости производилась по амплитуде колебаний параллелограммного механизма:
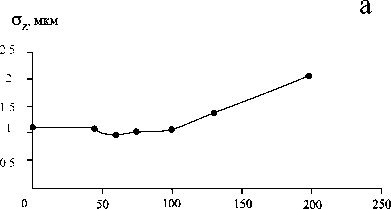
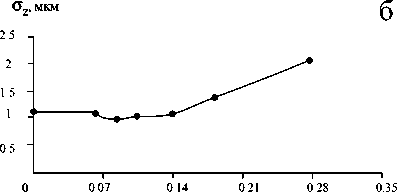
Рис. 4. Результаты экспериментального исследования зависимости среднеквадратического отклонения измерений расстояния до объекта от скорости поперечного смещения поверхности объекта относительно щупа (а) и относительного смещения зондирующего пятна за время одного измерения (б) при фиксированной скорости сканирования опорного зеркала
V x ,max
d x d t
= 2 π xm ν ,
t = 0
где x m — амплитуда механических колебаний;
ν — частота колебаний.
В эксперименте изменение скорости движения объекта задавалось изменением амплитуды генератора. Измерения проводились при следующих параметрах:
скорость перемещения опор-
ного зеркала…………………... V = 400 мм/с, длительность выходного сиг нала по уровню 0.1…………… τ1 = 50 мкс, размер зондирующего пятна… d = 40 мкм, частота колебаний параллело- граммного механизма………... ν = 23 Гц.
Поскольку при проведении эксперимента скорость перемещения опорного зеркала оставалась неизменной, можно сделать следующий вывод: 400 мм/с — это нижний предел скорости модуляции оптической разности хода при скорости поперечного смещения объекта, равной 60 мм/с.
На практике, однако, более полезной является зависимость σ z = σ z ( ετ ) , где величина ετ выражает отношение величины смещения зондирующего пятна за время одного к размеру пятна d :
V т, x ,max 1 ε = , .
τ d
Соответствующая зависимость рис. 4.
измерения τ 1
(4) показана на
На рис. 4 представлены результаты исследований — зависимость среднеквадратического отклонения измерений расстояния до объекта σ z от скорости движения объекта Vx ,max . Из графиков следует, что поперечное смещение поверхности относительно щупа практически не сказывается на точности измерений до скорости порядка 60 мм/с.
ЗАКЛЮЧЕНИЕ
Исследование оптического щупа позволило получить следующие результаты.
Анализ сканирования поверхности сложной формы показал, что наличие поперечной компоненты движения при модуляции оптической дли-
ны объектного плеча приводит к случайной модуляции интерференционного сигнала спекл-структурой отраженной объектной волны и к ошибке измерения.
Предложен способ минимизации влияния спекл-модуляции интерференционного сигнала на результат измерений. Способ заключается в увеличении числа независимых измерений за время одного прохода оптической измерительной головки с последующим их усреднением. Способ реализуется посредством введения дополнительной модуляции оптической разности хода.
На основе предложенного способа разработано устройство со сканированием опорного зеркала по периодическому закону. Определены соотношения между основными параметрами устройства, необходимые для достижения положительного эффекта.
Список литературы Исследование оптического щупа с частично когерентным источником излучения
- Hausler G. A bout fundamental limits of three-dimensional sensing (or: nature makes no presents)//Proc. SPIE: Optics in Complex Systems. 1990. V. 1319. P. 352-353.
- Siavash Y. et al. Diagnostic blood flow monitoring during therapeutic interventions using color Doppler optical coherence tomography//Proc. SPIE. 2000. V. 3251. P 126-132.
- Hausler G., Lindner M.W. Coherence radar and spectral radar -new tools for dermatological diagnosis//F. Biomed. Opt. 1998. V. 3, N 1. P. 21-31.
- Геликонов В.М. и др. Когерентная оптическая томография микронеоднородностей биотканей//Письма в ЖЭТФ. 1995. Т. 61, вып. 2 С. 149-153.
- Коломийцев Ю.В. Интерферометры. Л.: Машиностроение, 1976. 296 с.
- Большаков О.П., Котов И.Р., Майоров Е.Е., Хопов В.В. Когерентно-ограниченная интерферометрическая система технического зрения//Материалы V Всероссийской конференции "Фундаментальные исследования в технических университетах". СПб., 2001. С.126-127.
