Исследование особенностей внешних динамических характеристик гребка пловцов-дельфинистов с последующей коррекцией рационального расположения сегментов движителей в коридоре модельных параметров

Автор: Красильников Владимир Леонидович, Ведерникова Ольга Борисовна, Комельков Сергей Анатольевич, Шевцов Анатолий Владимирович, Клещенкова Наталья Евгеньевна
Журнал: Человек. Спорт. Медицина @hsm-susu
Рубрика: Спортивная тренировка
Статья в выпуске: 4 т.18, 2018 года.
Бесплатный доступ
Цель исследования. Оценить скоростно-силовые характеристики гребка руками пловцов-дельфинистов. Предложить методику коррекции индивидуального силового русла гребка на основе тренажёрных устройств. Материалы и методы. Исследования проводились на основе прибора РГД-2 (регистратор гребковых движений), позволяющего оценить скоростно-силовое русло гребка (СРГ). В исследованиях принимали участие пловцы ДЮСШ «ЮНИКА» г. Челябинска «А» (КМС) и «З» (КМС). Оба пловца специализируются в плавании спортивным способом «Дельфин». К ладоням спортсменов прикреплялись датчики, позволяющие выполнять пловцу задание в автономном режиме. Полученная информация через радиоканал передавалась в компьютер. Обработанный материал выводился на экран в виде графиков, где по вертикальной оси оценивался силовой потенциал, по горизонтальной оси - временные характеристики гребка. Результаты. На основе исследования приёма принудительного ограничения движений (механическое ограничение направления движений) возможно конструирование тренажёров, моделирующих кинематику гребка дельфинистов высокого класса, с последующим внедрением их в тренировочный процесс коррекции техники. Заключение. Установлено, что предложенную нами методику коррекции индивидуального силового русла гребка на основе тренажёрных устройств можно эффективно применять в различных вариантах для коррекции техники гребка руками.
Спортивная техника, "силовое русло гребка" (срг), модель гребка, тренажёры, фазовая структура гребка
Короткий адрес: https://sciup.org/147231812
IDR: 147231812 | УДК: 797.212.6.015 | DOI: 10.14529/hsm180412
Studies of features of arm stroke external dynamic characteristics in dolphin-style swimmers with a subsequent correction of the position of body segments in the range of model parameters
Aim. The article deals with the assessment of speed-strength characteristics of arm strokes in dolphin-style swimmers and development of the method for correcting their individual force course with the help of the training equipment. Materials and methods. We conducted the study with the help of the device for arm strokes registration - RGD-2, which allows us to assess the speed-strength course (SSC) of an arm stroke. Two swimmers from the Yunika youth sports school participated in the study: athlete A (Candidate for Master of Sport) and athlete З (Candidate for Master of Sport). Both athletes are dolphin-style swimmers. Results. We used the method of forced movement restriction (mechanical restriction of movement directions) to prove the possibility of creating the training equipment, which imitate the kinematics of elite dolphin-style swimmers arm strokes, with its subsequent implementation in the training for technique improvement. Conclusion. We established that the method proposed for correcting the individual strength course of arm strokes can be effectively used to improve arm strokes technique.
Текст научной статьи Исследование особенностей внешних динамических характеристик гребка пловцов-дельфинистов с последующей коррекцией рационального расположения сегментов движителей в коридоре модельных параметров
Введение. Процесс формирования спортивной техники требует комплексного подхода как к детализации самого двигательного действия, так и к средствам, методам и функциональной наполняемости всей локомоторной схемы [1, 2, 11–13]. Способ плавания «Дельфин» в этом случае самый трудоёмкий. Спортивный результат у пловцов-дельфинистов определяется тесной взаимосвязью таких морфофункциональных показателей, как обхват плеча, грудной клетки, подвижность в плечевых и голеностопных суставах, гибкость позвоночника и высокой степенью силовой подготовленности [3, 9]. Координационные особенности при плавании способом «Дельфин» не естественны для человека как при передвижении на суше, так и в воде.
Основным движителем пловца-дельфи-ниста являются руки, которые при активном сочетании с волнообразными движениями тела и хлёсткими ударами ног, способствуют продвижению пловца вперёд. Спортсмен выполняет гребок одновременно двумя руками в течение 0,6–0,7 с, а затем проносит их над водой (≈ 0,4 с), находясь в безопорном положении. При этом создаются большие цикловые и внутрицикловые колебания в скоростновременном режиме, оказывающие влияние на форму и содержание кинематики гребка. Благодаря аппаратуре, позволяющей выполнить подводные съёмки, форма гребка хорошо изучена и представлена в виде модельных (пространственных и временных) характеристик пофазно [4–6]. Однако более подробно необходимо изучить внешние динамические характеристики гребка.
Цель. Оценить скоростно-силовые характеристики гребка руками пловцов-дельфи-нистов. Предложить методику коррекции ин- дивидуального силового русла гребка на основе тренажёрных устройств.
Методы и организация исследований. Исследования проводились на основе прибора РГД-2 (регистратор гребковых движений) [7], позволяющего оценить скоростно-силовое русло гребка (СРГ). В исследовании принимали участие пловцы детско-юношеской спортивной школы (ДЮСШ) «Юника» г. Челябинска «А» и «З». Оба пловца кандидаты в мастера спорта (КМС) по плаванию и специализируются в плавании способом «Дельфин». К ладоням спортсменов прикреплялись датчики, позволяющие выполнять пловцу задание в автономном режиме. Полученная информация через радиоканал передавалась в компьютер. Обработанный материал выводился на экран в виде графиков, где по вертикальной оси оценивался силовой потенциал, по горизонтальной оси – временные характеристики гребка.
Результаты исследований и их обсуждение. На рис. 1 и 2, а также в табл. 1 и 2 представлены графики и количественные характеристики силового русла гребка пловцов «А» и «З». Видны значительные различия во всех циклах, а также в силовых и временных характеристиках в фазной структуре гребка спортсменов. Важно учитывать, что оба спортсмена имеют большой стаж занятий плаванием и, согласно всем теоретическим положениям, техника у них должна быть устойчивой, на уровне динамического стереотипа. Исходя из этого, можно предположить, что стабильность больше характерна для пространственно-временных характеристик, т. е. внешнего проявления движения, чем для скоростно-силового потенциала.
У пловца «А» (рис. 1, табл. 1) во всех циклах в начальной части гребка (фаза «захвата» – «б») выражены заметные силовые колебания, отличающиеся по частоте и величине. Например, в первом цикле величина усилий колебалась в позициях 6, 8, 5 кг, а во втором – 7 кг. Ещё более неожиданным оказалась неустойчивость СРГ в основной части гребка (фаза «отталкивания» – « г »), где пловцу необходимо выполнить максимальное усилие для продвижения тела вперёд. В нашем варианте пловец в течение 0,2 с набирает силовой потенциал до 19 кг, затем снижает до 15 кг и вновь увеличивает до 20 кг.
У второго пловца «З» (рис. 2, табл. 2) начальная часть гребка протекает более плавно. Однако вторая половина (t6) изобилует многочисленными силовыми перепадами (14, 12,
-
15, 13, 18–19 кг), выполненными за 0,3 с. Неустойчивость силового потенциала основной части гребка, разделённого на несколько пиковых всплесков, ухудшает средний силовой показатель. Например, если бы пловцу «З» удалось удерживать усилие 19 кг в течение 0,3 с, то это и было бы максимальным усилием в основной части гребка. А в представленной ситуации его средний показатель усилия составляет лишь 15 кг. Учитывая, что на 100метровой дистанции дельфинист выполняет 48–50 гребков, а на 200-метровой – вдвое больше, то не трудно подсчитать потери скоростно-силового потенциала, тесно коррелирующего со спортивным результатом.
Приведённые выше примеры дают основание считать, что в технике СРГ пловцов не всё в порядке. Причина кроется в эффекте опоры, которая возникает при рациональном расположении сегментов руки к водному потоку. Ориентируя кисть, предплечье, плечо под различными углами тангажа и стреловидности, можно улучшить опорные реакции или наоборот «смазать гребок».
Практика доказывает, что решение проблемы эффективности гребка является сложнейшей задачей [2, 5]. Даже опытный тренер не сможет с уверенностью определить положение сегментов руки в отдельных фазах гребка. Подводная видеосъёмка позволит частично решить эту проблему, стоит учитывать, что покадровая обработка видеозаписи не позволит дать объективную информацию длительностью 0,1 с. Также турбулентный поток затрудняет зрительную оценку кинематики.
Встаёт вопрос о подборе средств в разработке методики. Мы предлагаем методику коррекции техники гребка руками, основанной на применении тренажёрного устройства, в конструкцию которого заложена модельная траектория гребка спортсменов высокого класса (рис. 3) [8]. Искусственное ограничение возможных отклонений в гребковом движении позволяет выполнять имитационное задание на суше в различных темповых режимах. Подготовительная часть цикла выполняется идентично, как при плавании. Тренер контролирует весь процесс и может остановить движение пловца в любой фазе цикла, поправить расположение сегментов рук (руки), создавая статическое напряжение. Ряд таких фиксированных точечных коррекций даёт возможность спортсмену осмысленно прочувствовать мышечную активность заданной позы и передать её в динамике всего цикла.
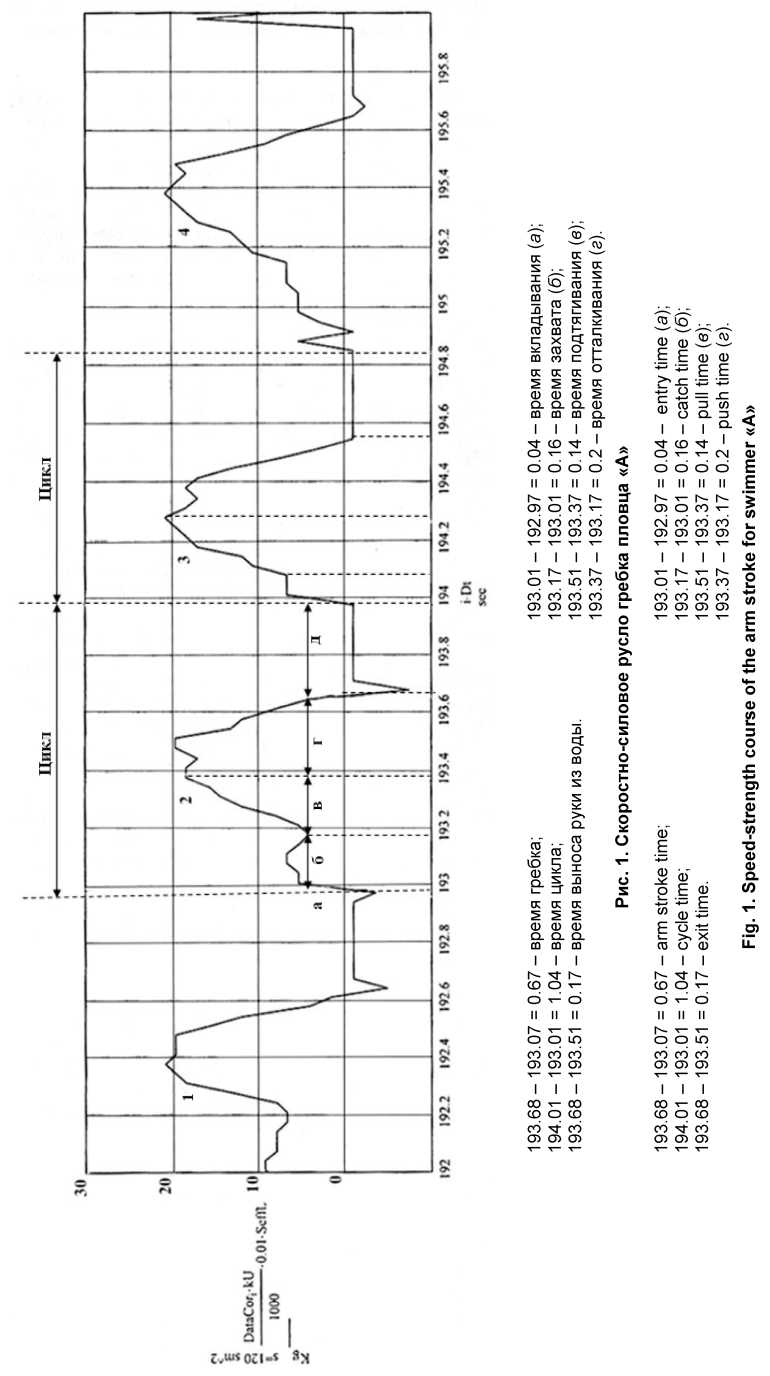
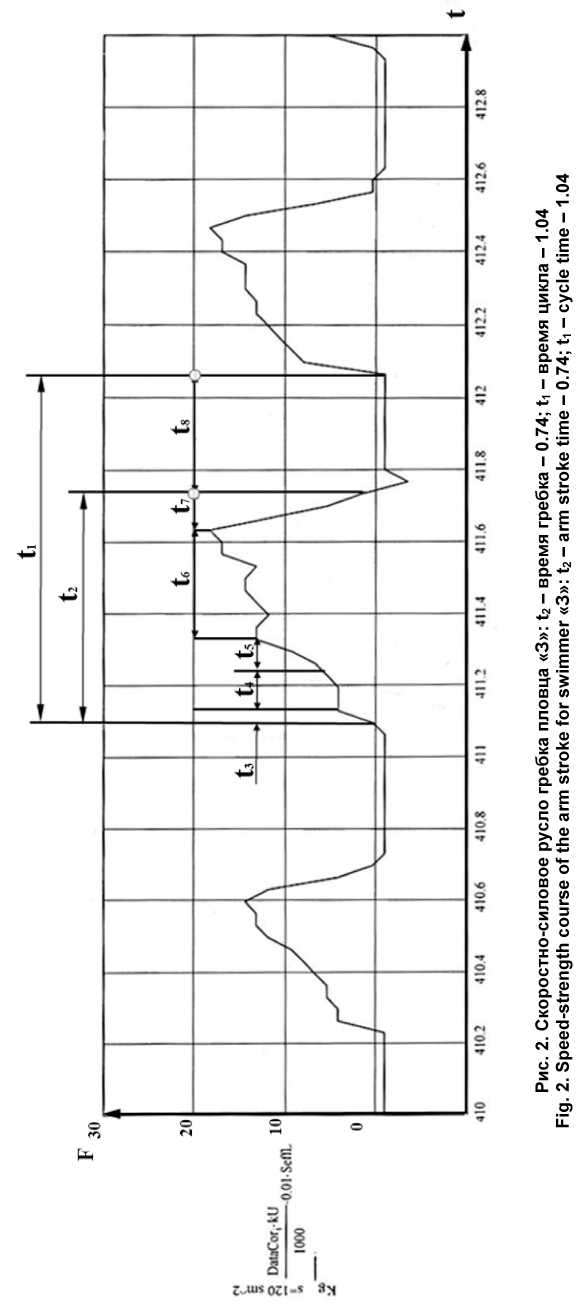
Таблица 1
Table 1
Силовые и временные показатели фазовой структуры гребка пловца «А»
Force and time indicators of arm stroke phases for swimmer “А”
|
Фазы гребка Arm stroke phases |
Цикл 2 / Cycle 2 |
Цикл 3 / Cycle 3 |
|||
|
t c |
F кг |
t c |
F кг |
||
|
а |
Вкладывание / Entry |
0,04 |
7 |
0,05 |
7 |
|
б |
Захват / Catch |
0,16 |
6. 8. 5 |
0,1 |
7 |
|
в |
Подтягивание / Pull |
0,14 |
5–19 |
0,2 |
7–19 |
|
г |
Отталкивание / Push |
0,2 |
19. 15. 20 |
0,28 |
20.8. 17–19 |
|
д |
Вынос / Exit |
0,07 |
9,0 |
0,05 |
9,0 |
|
е |
Пронос / Recovery |
0,32 |
0 |
0,22 |
0 |
Таблица 2
Table 2
Силовые и временные показатели фазовой структуры гребка пловца «З»
Force and time indicators of arm stroke phases for swimmer “З”
|
Фазы Arm stroke phases |
Время с Time, s |
Усилие кг Impulse, kg |
|
|
t 3 |
Вкладывание / Entry |
0,04 |
0–3 |
|
t 4 |
Захват / Catch |
0,14 |
3–4 |
|
t 5 |
Подтягивание / Pull |
0,13 |
4–14 |
|
t 6 |
Отталкивание / Push |
0,3 |
14. 12. 15. 13. 18. 19,3 |
|
t7 |
Вынос / Exit |
0,17 |
19,3–0 |
|
t 8 |
Пронос / Recovery |
0,26 |
|
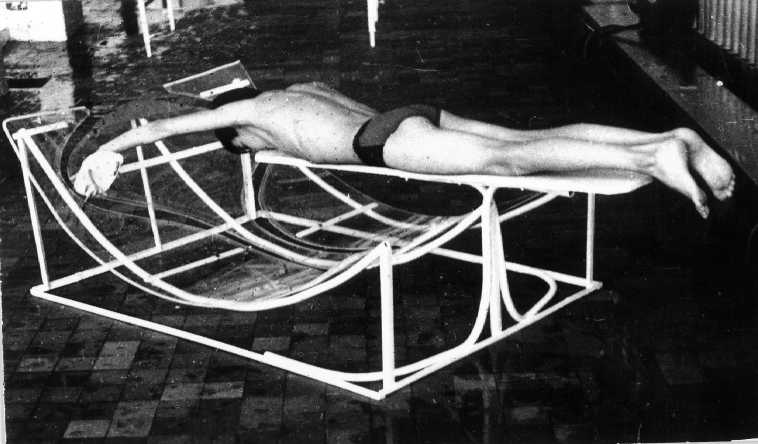
Рис. 3. Тренажёр избирательного воздействия «Дельфин». Рабочий момент на суше
Fig. 3. “Dolphin” simulator of selective impact. Out of water performance
Во втором варианте тренажёр применяется в воде. Для того чтобы регулировать глубину погружения тренажёра в воду изготовлен специальный стол с выдвижными ножками. Пловец выполняет те же движения, что и на суше (рис. 4).
Для фиксации спортсмена на лежаке предусмотрено крепление в виде поясного ремня. Лопаточки для рук выполнены из металла, что позволяет создавать более устойчивое поло- жение кисти во время гребка и чувствовать опору о воду.
Таким образом, предлагаемый тренажёр можно применять в различных вариантах для коррекции техники гребка руками. Фиксированное положение спортсмена создаёт реальное представление о соотношении положения тела с движениями рук в различных фазах гребка.
Длительность применения тренажёра при тесном взаимодействии с тренером зависит
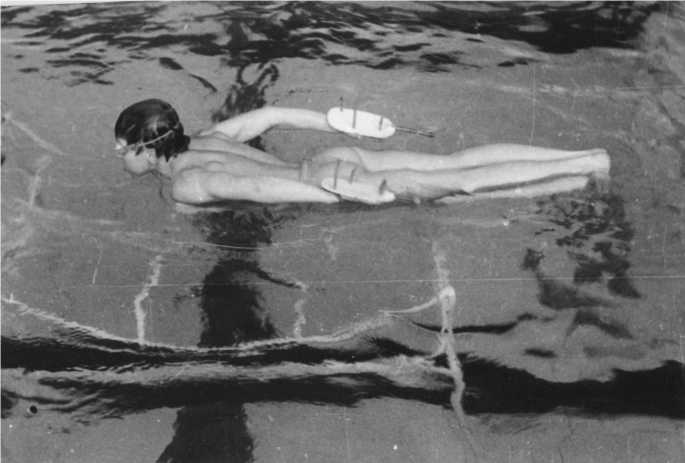
Рис. 4. Тренажёр избирательного воздействия «Дельфин». Рабочий момент в воде
Fig. 4. “Dolphin” simulator of selective impact. In water performance
от индивидуальных возможностей пловца и его подготовленности [10].
Заключение. Выборочные исследования внешних динамических характеристик техники гребка руками пловцов-дельфинистов проявляют следующее:
-
- силовое русло гребка в циклах нестабильное;
-
— силовой потенциал основной части гребка разделяется на несколько пиковых всплесков, что снижает средний показатель усилия;
-
— неустойчивость СРГ, по всей вероятности, связана с опорными реакциями движителя к потоку воды, т. е. с положением опорных звеньев руки;
-
— на основе использования приёма принудительного ограничения движений (механическое ограничение направления движений) возможно конструирование тренажёров, моделирующих кинематику гребка дельфини-стов высокого класса с последующим внедрением их в тренировочный процесс для коррекции техники.
Статья выполнена при поддержке Правительства РФ (Постановление № 211 от 16.03.2013 г.), соглашение № 02.A03.21.0011.
Список литературы Исследование особенностей внешних динамических характеристик гребка пловцов-дельфинистов с последующей коррекцией рационального расположения сегментов движителей в коридоре модельных параметров
- Аикин, В.А. Возрастные особенности формирования движений в спортивном плавании / В.А. Аикин, М.Д. Бакшеев, А.В. Коричко, Г.А. Тарасевич // Современные проблемы науки и образования. - 2014. - № 4. - С. 6.
- Баранов, В.А. Эффективность дифференцированного применения средств и методов в учебно-тренировочном процессе юных пловцов / В.А. Баранов // Социально-экономические явления и процессы. - 2011. - С. 316-319.
- Войлоков, В.С. Использование элементов биомеханического контроля в совершенствовании техники различных стилей плавания / В.С. Войлоков, В.В. Лысенко, И.Г. Павельев // Современные методы организации тренировочного процесса, оценки функционального состояния и восстановления спортсменов; материалы Всерос. науч.-практ. конф. - 2017. - С. 43-45.
- Волков, Д.А. Оптимизация методов обучения плаванию стилем баттерфляй / Д.А. Волков // Актуальные проблемы физической культуры и спорта: материалы V междунар. науч.-практ. конф. - 2015. - С. 162-164.
- Макаренко, Л.П. Техническое мастерство пловца / Л.П. Макаренко. - М.: Изд-во «Физкультура и спорт», 1975. - 223 с.
- Каунсилмен, Д. Спортивное плавание / Д. Каунсилмен. - М.: Изд-во «Физкультура и спорт», 1982. - 207 с.
- Пат. 115475 Российская Федерация. Регистратор гребковых движений пловца / В.Л. Красильников, Д.А. Кацай; заявитель и патентообладатель Юж.-Урал. гос. ун-т. - № 2011146609; заявл. 16.11.2011; опубл. 27.04.2012, Бюл. № 10. - 5 с.
- Красильников, В.Л. Возрастные особенности формирования техники гребка руками юных пловцов: учеб. пособие / В.Л. Красильников, Т.А. Комельков. - Челябинск: Изд-во УралГАФК, 2004. - 54 с.
- Красильников, В.Л. Управление техническим мастерством пловцов 11-12 лет в период базовой подготовки / В.Л. Красильников // Плавание. - 1982. - С. 50-53.
- Торопов, А.А. Выявление ошибок в технике плавания способом баттерфляй у пловцов 11-12 лет на этапе начальной подготовки / А.А. Топоров, О.Б. Галеева // Символ науки. - 2017. - № 6. - С. 126-128.
- Blickhan, Reinhard. Body movement distribution with respect to swimmer's glide position in human underwater undulatory swimming / Reinhard Blickhan, Stefan Hochstein // Human Movement Science, December 2014. - No. 38. - P. 305-318.
- Mocanu G.D. Theory of physical education and sport. - Galaţi, The "Dunărea de Jos" University Foundation Publ., 2015. - 177 p.
- Mocanu G.D. The Didactics of Physical Education and Sport. - Galaţi, The "Dunărea de Jos" University Foundation Publ., 2015. - 278 p.
