Исследование параметрических резонансных колебаний в ходовой части гусеничной машины

Автор: Тараторкин Алексей Игоревич
Рубрика: Численные методы моделирования
Статья в выпуске: 1 т.22, 2022 года.
Бесплатный доступ
К современным быстроходным гусеничным машинам предъявляются повышенные требования по различным эксплуатационным и функциональным характеристикам. В частности особые требования предъявляются к уровню вибронагруженности, определяющему работоспособность различных элементов конструкции гусеничного движителя, системы подрессоривания, других узлов и агрегатов машин, в том числе дополнительного оборудования, монтируемого на базовых шасси. В предлагаемой работе рассматривается взаимодействие гусеницы с опорным катком, как одного из основных источников формирования высокочастотного вибрационного нагружения элементов конструкции ходовой части и гусеничного движителя. Устанавливается связь между двухпараметрическим регулированием процесса взаимодействия опорного катка с гусеницей с уровнем динамических нагрузок и температуры шин опорных катков. Разрабатывается комплекс математических моделей для численного определения вибрационной и тепловой нагруженности опорных катков, оценивается устойчивость полученных периодических решений на основе анализа параметрических колебаний с использованием диаграммы Айнса-Стретта. На основе результатов исследования обосновывается необходимое значение модуляции жесткости системы «каток - гусеница», обеспечивающей исключение параметрических резонансов. Показано, что конструкция модернизированного трака со смещенными полутраками, а также вариант с полутраками, выполненными по схеме «зигзаг» позволяет существенно сократить параметр глубины модуляции μ (соответственно и параметр h диаграммы Айнса-Стретта) на 40 %, что обеспечивает снижение вероятности возбуждения резонансных параметрических колебаний при качении опорного катка по звенчатой гусеницей, лежащей на твердом грунте. Полученные теоретические заключения подтверждаются результатами многочисленных экспериментальных исследований как динамической, так и тепловой нагруженности шин опорных катков. На основе анализа существующей методики расчета температуры шин опорных катков гусеничных машин, результатов расчетно-экспериментального исследования делается заключение о существовании динамических явлений, не учитываемых в данной методике, но оказывающих существенное влияние на изменение температуры внутренних слоев массивных шин гусеничных машин.
Гусеничная машина, опорный каток, шина, устойчивость, динамическая и тепловая нагруженность, температура, уравнение матье, параметрический резонанс
Короткий адрес: https://sciup.org/147237470
IDR: 147237470 | УДК: 629.3
Study of parametric resonance vibrations in the underway of a tracked vehicles
Nowadays increased requirements to modern high-speed tracked vehicles are imposed on various operational and functional characteristics. In particular, special requirements are imposed on the level of oscillation load, which determines the performance of various structural elements of the caterpillar drive, the suspension system, and other components and assemblies of machines, including additional equipment mounted on the base chassis. In the proposed paper, the interaction of the caterpillar drive with the road wheel when moving on hard soils is considered, as one of the main sources of the formation of high-frequency oscillation loading of the machine. A connection is established between the parametric change in the rigidity of the elastic interaction of the road wheel and the rubberized treadmill with increased dynamic and thermal tension of the massive tires of the road wheels. A complex of mathematical models for the numerical determination of the oscillation and thermal loading of road wheels is being developed, the stability of the obtained periodic solutions is estimated based on the analysis of parametric oscillations using the Ains-Strett diagram. On the basis of the research results, the necessary value of the modulation depth of the elastic interaction stiffness is substantiated, which ensures the elimination of parametric resonances. It is shown that the displacement of the gaps between of trucks by giving it a “zigzag” shape increases the elastic convergence of the axle of the road wheel with the rubberized treadmill in the area of the rubber-metal hinges. This makes it possible to reduce the modulation acceleration parameter μ (and, accordingly, the parameter of the Aynes-Strett diagram) by 40 %, which reduces the likelihood of excitation of resonant oscillation parameters when using a road wheel massive tire and a rubberized treadmill. In addition, the paper presents the results of an experimental study of the thermal stress of the massive tires of road wheels of high-speed tracked vehicles. The existing method for calculating the thermal stress of the massive tires of road wheels is analyzed, phenomena that are not taken into account in this method are revealed, but which have a significant effect on the change in the temperature of the inner layers of massive tires of high-speed tracked vehicles.
Текст научной статьи Исследование параметрических резонансных колебаний в ходовой части гусеничной машины
Введение. Повышение подвижности транспортных средств является актуальной проблемой. Для ее решения в современных машинах увеличивается мощность двигателя, совершенствуются свойства трансмиссии, движителя, систем подрессоривания и управления движением. Однако реализация потенциальных скоростных свойств быстроходных гусеничных машин ограничивается рядом не исследованных ранее динамических явлений, возникающих при взаимодействии гусеничного движителя с опорной поверхностью (Янчик и др. 2005 [1], Вонг, 1995 [2]) и приводящих, в частности к ограничению долговечности элементов конструкции движителя вследствие высоких динамических и температурных перегрузок, потере устойчивости движения машины и т. д. Движение гусеничных машин осуществляется в основном вне дорог, на неподготовленных природных территориях, начиная от пустынного песка, заболоченной местности и заканчивая снегом (Вонг, 1995 [2]). Однако при движении по твердой поверхности - мерзлый грунт,, бетонные трассы и др. - возникают динамические явления, существенно ограничивающие ресурс элементов движителя.
Проблема взаимодействия движителя гусеничных машин с рельефом местности всегда привлекала значительное внимание исследователей. Новаторские работы были основаны прежде всего на эмпирическом подходе к предмету исследования. Первые публикации в этой области были сделаны Беккером (1969) [3], а затем Уилером (1977) [4], Вонгом (1984) [5] и другими учеными. Беккер является инициатором широких исследований системы «движитель – опорная поверхность», а Муро and O’Брайен в 2004 г.) [6] создали полуэмпирические модели взаимодействия движителя с местностью, которые являются основой террамеханики гусеничных транспортных средств. В своей работе они упростили процесс взаимодействие между движителем с опорной поверхностью, рассматривая опорный каток, как жесткую опору.
Вонг (2001) [7] описал более сложную модель, в которой гусеница предполагалась «гибкой». В работе Вик (1996) [8] гусеница также моделируется как гибкая и нерастяжимая нить. Данные математические модели позволяют описать взаимодействие гусеницы с опорным основанием.
Галастис (1961) [9] описал метод, который позволяет прогнозировать динамические нагрузки, возникающие в движителе быстроходных гусеничных машин. Ли и соавт. (1998) [10] описали взаимодействие между звеньями гусеницы и другими элементами движителя, такими как опорные катки. Они представили результаты компьютерного моделирования крупномасштабной гусеничной машины со ста шестнадцатью степенями свободы.
Уилер (1997) [11] представил компьютерную программу, которая позволяет имитировать динамику движения гусеничной машины. Современные разработки компьютерных методов и все более передовых технологий дают возможность проводить точное моделирование больших и сложных систем. В рамках данной концепции Маидр (2002, 2006) [12] представил модель взаимодействия « опорный каток – гусеница – опорное основание» на основе метода конечных элементов. Модель представляет собой сегмент гусеницы, который взаимодействует с опорной поверхностью и опорными катками при представлении гусеницы в виде непрерывной ленты с жесткими связями. В работе задействован так называемый силовой «суперэлемент», который включает в себя гусеничный сегмент, два опорных катка и грунт под гусеницей между опорными катками. Санду и Фриман (2005) [13] использовали метод моделирования «суперэлементов» для высокоскоростных военных гусеничных машин, предполагая, что гусеничная цепь может быть смоделирована как непрерывная гибкая нить. Таким образом, проведенный анализ показал, что известные модели описывают взаимодействие движителя с опорным основанием при движении, как правило, по деформируемому грунту, когда контакт первого опорного катка с сегментом гусеницы приводит к погружению траков гусеницы в грунт. Следующие опорные катки двигаются по относительно ровной поверхности гусеницы. В таких условиях жесткость неподрессоренных элементов конструкции гусеничного движителя не оказывает существенного влияния на характер динамического нагружения опорного катка и беговой дорожки гусеницы.
В тоже время при движении по жесткой опорной поверхности (скалистые горные дороги, обледенелые трассы) влияние звенчатости гусениц на динамические процессы становится существенным. Применение обрезиненных беговых дорожек и резино-металлических шарниров (РМШ) в конструкциях гусениц приводит к усложнению процесса формирования динамических высокочастотных нагрузок в ходовой части и усложнению математических моделей, вследствие возникновения не учитываемых ранее явлений, например отрыва катков от беговой дорожки [1, 14– 15]. В результате повышенного вибрационного нагружения выходят из строя не только элементы конструкции гусеничного движителя и системы подрессоривания, но и различное оборудование, устанавливаемое на базовом шасси. Несмотря на то, что в отечественной литературе, в отраслевых стандартах гусеничная цепь тоже, как правило, рассматривается в виде деформируемой однородной ленты, Аврамов В.П. [16] в своих работах обратил внимание на существенное влияние звенчатости гусениц на уровень динамической и тепловой напряженности опорных катков. При этом в отдельных работах указывается, что характер взаимодействия опорного катка с беговой дорожкой гусеницы носит нелинейный характер, что может привести к параметрическим резонансным колебаниям [17].
Таким образом, целью предлагаемого исследования является снижение динамической и тепловой нагруженности опорных катков гусеничных машин при движении по твердым грунтам.
Для этого разрабатываются математические модели, выполняется их верификация, исследуются причины, приводящие к нарушению устойчивости периодических решений, обосновываются варианты технических решений, позволяющих достичь поставленную цель.
Разработка математических моделей и теоретическое исследование
Исходными данными при разработке математической модели являются параметры реального объекта исследований – быстроходной гусеничной машин массой 14 т. При этом параметры шины опорного катка и беговой дорожки гусеницы определяются используемыми материалами. Шины ОК изготовлены из резины марки 4Э-1386 (Е = 7,36 МПа), резиновый слой гусеницы изготовлен из материала 51-3064 (E = 7,36 МПа). Совместная жесткость упругого взаимодействия «шина–дорожка» определялась методом конечно-элементного моделирования и проверялась экспериментально. Схема экспериментального определения деформации шины и резинового слоя гусеницы объекта исследования приведена на рис. 1.
По результатам расчетно-экспериментального исследования на серийной машине установлено, что величина вертикальных перемещений опорного катка изменяется от 5,017 до 6,187 мм. При этом максимальные деформации наблюдаются при перекатывании катка через резинометаллические шарниры (РМШ). Минимальные деформации фиксируются при положении катка на середине плитцы трака.
Для оценки динамической и тепловой нагруженности используется двухмассовая математическая модель, учитывающая колебания неподрессоренной массы опорного катка, подрессоренной массы корпуса машины, а также включающая в себя блок расчета температуры массивной шины.
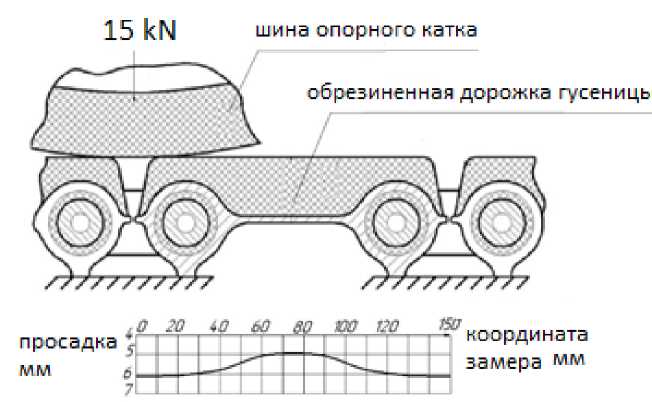
Рис. 1. Схема совместного экспериментального определения деформации шины и резинового слоя гусеницы объекта исследования
-
- 1∗( 1- ∗ sin( ))- 2∗( 1- 2)- 1∗( 1̇ - ∗ ̇∗cos( ) ⎪⎧ ̈1= m1
-
⎪ - 2∗( 2- 1)- 2∗( 1̇ - 2̇
= m2
-
A= / w=( ̈1∗ b )- ̈1∗ b )∗ V ∗ s ∗ℎ t _ cpct _ air
⎪A t=Tokr+, ⎩ ht_cpct_rubber где А – механическая работа, идущая на нагрев шины, Дж; Z̈ – ускорение опорного катка; V – скорость БГМ; S – площадь поверхности массивной шины; ht_cpcat_air – удельная теплоемкость резины; Тokr – температура окружающей среды; t – температура массивной шины.Значение параметров, необходимых для выполнения расчета, приведены в таблице.
Существующая в настоящее время методика расчета тепловой напряженности шин опорных катков разработана в сороковых годах прошлого века Козловым А.Г. и подробно изложена в работах [18]. Температура массивной шины определяется на основе расчетной схемы (рис. 2).
Таблица
Параметры расчета температуры массивной шины
|
Обозначение переменной |
Наименование |
Значение |
|
C1 |
жесткость взаимодействия шины катка с гусеницей |
3000000 |
|
C2 |
статическая торсиона |
47000 |
|
m1 |
масса катка, кг |
35 |
|
m2 |
масса машины, приходящаяся на один каток |
1800 |
|
L |
шаг гусеницы, м |
0,15 |
|
w |
траковая частота |
2 ”v/l |
|
a |
деформация массивной шины, м |
0,001 |
|
b |
коэффициент диссипации в резине |
1600 |
|
mss_tire |
масса резины, нагреваемой в момент времени, кг |
0,336 |
|
ht_cpct_rubber |
удельная теплоемкость резины, J/kg*С |
1420 |
|
init_tmprt |
температура потоков воздуха, С |
20 |
|
A_heatexchange |
2 площадь поверхности охлаждения, м |
0,002 |
|
ro_air |
плотность, kg/m^3 |
1,2 |
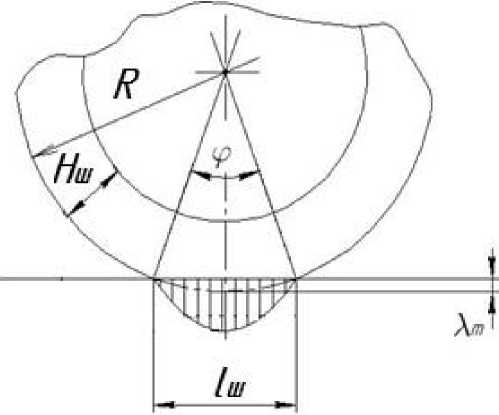
Рис. 2. Схема расчета резиновой шины опорного катка
Температура шины опорного катка определяется по зависимости:
т = в
+ ∝ ш ,
где t в – температура окружающего воздуха, К ; Q – количество тепла, выделяемое в массивной шине за 1 с работы, Дж ; α – коэффициент теплоотдачи от резины к воздуху, Вт/(м2.К) . Количество тепла Q определяется величиной диссипации энергии в процессе упругой деформации шины опорного катка и учитывается коэффициентом ψ внутреннего трения резины, ψ=0,25 …0,5 по формуле (4).
, 3.6nR, где n – частота вращения опорного катка, об/мин; V– скорость движения машины, км/ч; А – работа деформации массивной шины за один оборот опорного катка
А = шк( 1-^) . (4)
Коэффициенты, входящие в данное выражение, рассчитываются следующим образом:
I2
Лт = ш – максимальная деформация массивной шины, м; Iш
– длина хорды, по
4Р которой происходит контакт шины и беговой дорожки гусеницы, м ; Чт = – максимальное ш ш удельное давление в контакте шины с обрезиненной беговой дорожкой, Па.
Результаты моделирования по (1) показали, что максимальные высокочастотные виброускорения неподрессоренной массы при движении по твердому грунту достигают величины 30g. При этом температура внутренних слоев массивных шин достигает величины 150 …160 градусов при движении в резонансном режиме за время менее 60 секунд. При этом допустимая температура используемого клеевого материала составляет 153 градуса. Следствием этого является интенсивная деградация массивных шин опорных катков (рис. 3).

Рис. 3. Каток быстроходной гусеничной машины с расслоившейся массивной шиной опорного катка
Это подтверждается результатами ранее выполненных измерений температуры в массивных шинах опорных катков БГМ, приведенных на рис. 4.
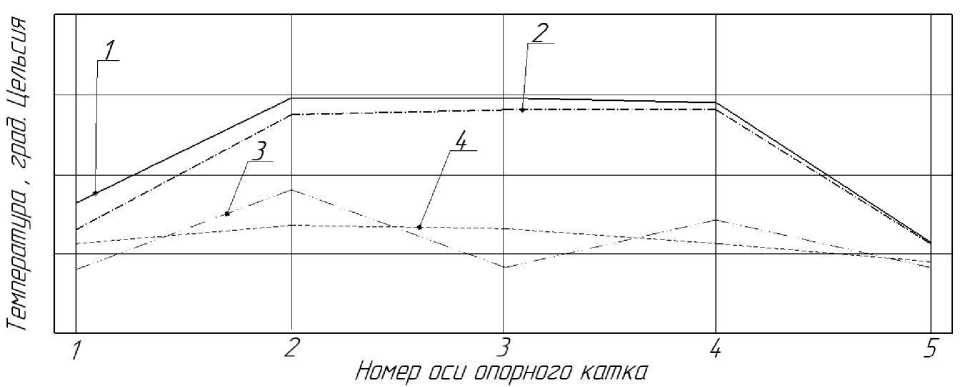
Рис. 4. Распределения температуры внутри массивных шин и на ее поверхности 1,2 – температура внутри массивных шин опорных катков правого и левого бортов; 3,4 – температура на поверхности массивных шин опорных катков правого и левого бортов
Как следует из рис. 4 температура в сердцевине массивных шин 2-го, 3-го, и 4-го опорных катков стабильно держится на уровне 150 градусов Цельсия, что свидетельствует о перегреве шин опорных катков в процессе эксплуатации.
Как указывалось выше, в существующих методиках расчета температура массивной шины определяется без учета звенчатости гусеничного обвода [18]. В то же время при воздействии на массивную шину постоянной статической нагрузкой, но при переменной жесткости в контакте массивной шины ОК и обрезиненной беговой дорожки, что учитывается в модели (1), удельное давление в контакте не является постоянным, а меняется в соответствии с «траковой» частотой, что приводит к периодическому изменению деформации массивной шины. Результатом этого является возникновение параметрических колебаний, с периодически изменяемым параметром c(t) - жесткостью [17].
Используемая в работе методология оценки устойчивости периодических решений при параметрических колебаниях подробно изложена многими авторами [19], а применительно к формированию нагрузок на опорный каток в работе [17]. В данном исследовании уточнены границы неустойчивости динамического процесса с учетом влияния диссипативных сил, определяемых экспериментально. На рис. 5 приведен анализ устойчивости системы без учета диссипации, а на рис. 6 с учетом диссипации.
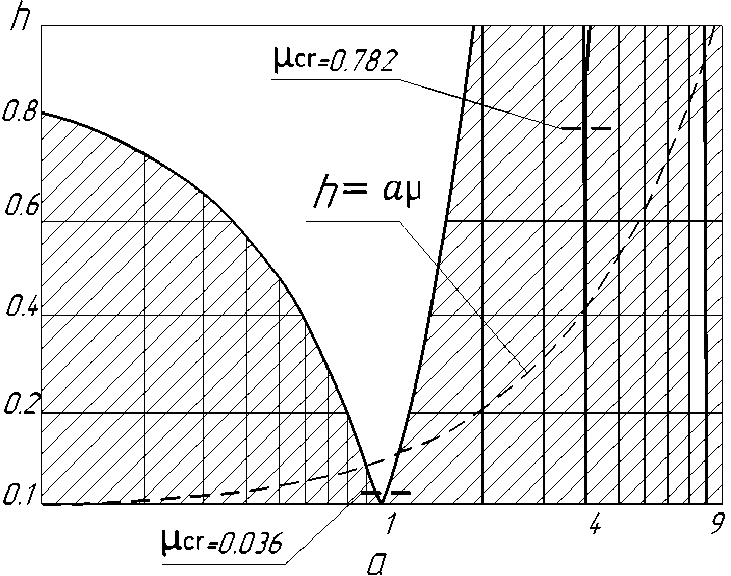
Рис. 5. Анализ устойчивости системы без учета диссипативных сил
Как следует из рис. 5 и 6, зоной резонанса является клиновая область на диаграмме Айнса-Стретта, соответствующая параметру а = (~“) = 1 (см. рис. 5) и коэффициенту расстройки ^ =2 (см. рис. 6). В обоих случаях центральная точка клина соответствует скорости 23,8 км/ч. Кроме того очевидно, что учет диссипативных сил незначительно расширяет область устойчивости. Тем не менее результаты, представленные на рис. 6, позволяют определить минимально необходимое значение параметра ^, при котором параметрический резонанс будет полностью исключен. Данное условие выполняется при значении и = 0,035. Применительно к объекту исследования параметрический резонанс возникает при скорости движения машины от 21,27 км/ч до 26,27 км/ч.
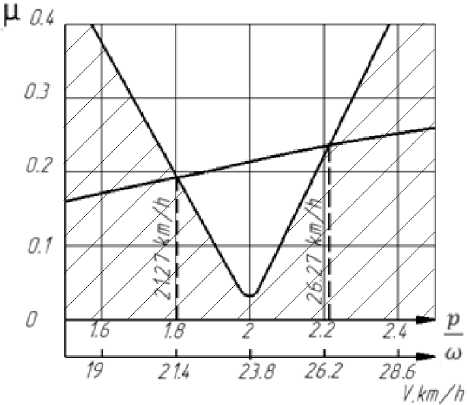
Рис. 6. Анализ устойчивости системы с учетом диссипативных сил
Результаты эксперементального исследования и численного моделирования
Для проведения экспериментальных исследований использовался комплекс информационноизмерительной аппаратуры на базе АЦП L-CardE-1440 c регистрирующим устройством. При проведении испытаний определялись вертикальные ускорения опорных катков машины при плавном разгоне от минимально устойчивой скорости до скорости 50 км/ч. В качестве первичных преобразователей использовались однокомпонентные датчики ускорений (АТ 1105-60А), устанв-ливаемые на стебле балансиров. Номинальный коэффициент трансформации в диапазоне измерения акселерометров ∓588 м/с2 (∓60g) составляет 10,2 mV/(m/s2), полоса пропускания от 0 до 700 Гц, нелинейность выходной характеристики не более 0,5 %. Производитель – ОАО «Арзамасское научно-производственное предприятие «ТЕМП-АВИА», г. Арзамас, Россия. Обработка экспериментальных данных выполнялась в программном пакете Power Graph Professional 3.3.8. На рис. 7 приведен пример реализации процесса высокочастотного нагружения опорного катка гусеничной машины.
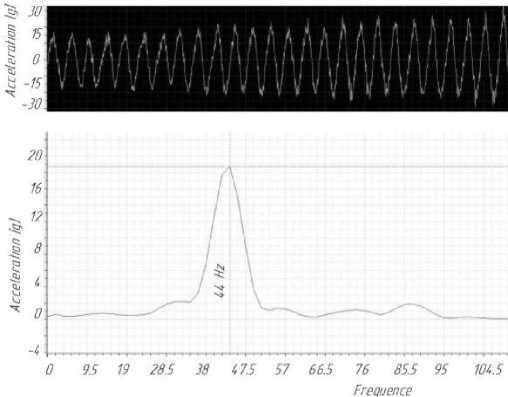
Рис. 7. Пример реализации процесса высокочастотного нагружения опорного катка гусеничной машины
Результаты испытаний показали, что ускорения на «траковой» частоте достигают 300 м/c2 и выше. С учетом значения неподрессоренной массы, дополнительная высокочастотная нагрузка, действующая на каток, достигает величины статического нагружения. Результаты выполненных экспериментов подтвердили гипотезу возникновения резонансных колебаний, реализуемых, как минимум, в одном скоростном диапазоне, соответствующем параметру диаграммы Айнса-Стретта a=1 . Это наиболее опасный случай проявления параметрического резонанса. При этом наибольшие амплитуды виброускорений были зарегистрированы на скоростях от 20 до 28 км/ч, что соответствует «траковой» частоте от 37 до 52 Гц.
Численное моделирование выполнялось в пакете MSC Nastran. Расчет выполнен в SOL 101: нелинейном блоке статического анализа, размер конечных элементов варьируется от 2 до 5 мм. При моделировании приняты условия нагружения опорного катка силой 15 кН. Расчетная схема определения напряженно-деформированного состояния соответствует условиям проведения эксперимента, результаты которого приведены на рис. 1. При моделировании напряженно-деформированного состояния и определении глубины модуляции упругого взаимодействия использовались два варианта конструкции гусениц. Результаты представлены в виде графиков на рис. 8. Области a и b демонстрируют разницу упругого сближения «шина – обрезиненная беговая дорожка» по длине гусеницы график 1 соответствует прототипу, график 2 – модернизированной конструкции [20].
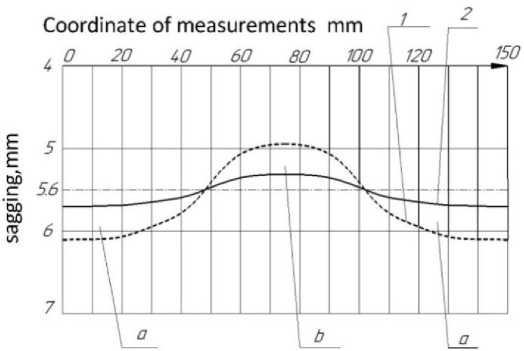
Рис. 8. Результаты численного моделирования двух вариантов гусениц 1 – серийный вариант; 2 – модернизированный вариант
В модернизированном варианте гусеницы требуемое снижение значения параметра ц (параметра ℎ в терминах диаграммы Айнса-Стретта) достигается смещением полутраков гусеницы на 10 мм [20]. Такой же результат может быть достигнут при зигзагообразном выполнении каждого полутрака гусеницы. В обоих случаях ограничением при смещении полутраков является условие ненатыкания смежных траков при прохождении по окружности ведущего колеса гусеничной машины. Достигнутый уровень «сглаживания – уменьшения» глубины модуляции jU позволяет прогнозировать исключение возникновения параметрических резонансов, вследствие чего можно ожидать существенного снижения уровня динамической и тепловой нагруженности шин опорных катков.
Выводы
-
1) разработанный комплекс конечно-элементных и твердотельных математических моделей позволил подтвердить гипотезу о возникновении параметрических резонансов неподрессоренных элементов конструкции ходовой части гусеничной машины при движении по твердым грунтам;
-
2) результаты выполненных экспериментальных исследований подтвердили адекватность разработанных математических моделей;
-
3) результаты расчетно-экспериментального исследования позволили:
-
– определить зоны неустойчивости полученного периодического решения, характеризующего процесс движения опорного катка по беговой дорожке;
-
– обосновать и определить требуемые значения упруго-инерционных показателей системы «шина опорного катка – гусеница» при двухпараметрическом регулировании процесса их динамического взаимодействия.
Список литературы Исследование параметрических резонансных колебаний в ходовой части гусеничной машины
- Янчик, А.Г. Нелинейные колебания опорного катка с внешней упругой сплошной шиной / А.Г. Янчик, О.В. Стаховский, Н.В. Кохановский и др. // Харьковский автомобильно-дорожный вестник. - 2005. - № 29. - С. 44-47.
- Wong, J.Y. Application of the Computer Simulation Model NTVPM-86 to the Development of a New Version of the Infantry Fighting Vehicle ASCOD / J.Y. Wong // Journal of Terramechanics -1995. - Vol. 33, №. 1. - P. 53-61.
- Bekker, M.G. Introduction to Terrain-Vehicle Systems / M.G. Bekker - University of Michigan Press, 1969. - 846p.
- Wheeler, P. Tracked vehicle ride dynamics computer program / P. Wheeler // SAE - 1977 -Paper 770048.
- Wong, J.Y. Theoretical Prediction and Experimental Substantiation of the Ground Pressure Distribution and Tractive Performance of Tracked Vehicles / J.Y. Wong, M. Garber, J. Preston-Thomas //Proc. Instn. Mech. Engrs. - 1984. - Vol. 198(D15). - P. 265-285.
- Muro, T. Terramechanics. Land Locomotion Mechanics / T.Muro, J.O 'Brien - London CRC Press, 2004. - 322p. https://doi.org/10.1201/9780203024157
- Wong, J.Y. Theory of ground vehicles. - 3rd edition./ J.Y. Wong - Wiley-Interscience, 2001. -560 p.
- Wyk, D.J. van. Mathematical modeling of the interaction between a tracked vehicle and the terrain/ D.J. van Wyk, J. Spoelstra, J.H. de Klerk // Appl. Math. Modeling. - 1996. - Vol. 20. -P. 838-846.
- Galaitsis, A.G. TRAXION: A Model for Predicting Dynamic Track Loads in Military Vehicles/ A.G. Galaitsis// Journal of Vibration and Acoustics-transactions of The ASME. - 1984. - Vol. 106. -P. 286-291. DOI: 10.1115/1.3269183
- Lee, H.C. Spatial Dynamics of Multibody Tracked Vehicles Part II: Contact Forces and Simulation Results / H.C. Lee, J.H. Choi, A.A. Shabana // Vehicle System Dynamics: International Journal of Vehicle Mechanics and Mobility. - 1998. - Vol. 29. - P. 113-137. DOI: 10.1007/s11071-013-1005-6.
- Wheeler, P. Tracked vehicle ride dynamics computer program/ P. Wheeler// SAE. - 1997. -Paper 770048.
- Ma, Zheng-Dong A Super-Element of Track-Wheel-Terrain Interaction for Dynamic Simulation of Tracked Vehicles / Zheng-Dong Ma, N. C. Perkins // Multibody System Dynamics. - 2006. -Vol. 15. - P. 347-368. DOI: 10.1007/S11044-005-9001-3
- Sandu, C. Military tracked vehicle model. Part I: multibody dynamics formulation / C. Sandu, J.S. Freeman // International Journal of Vehicle Systems Modelling and Testing. - 2005. - Vol. 1. -P. 48-67. DOI: 10.1504/IJVSMT.2005.008572.
- Платонов, В.Ф. Динамика гусеничного движения / В.Ф. Платонов - М.: Машиностроение, 1973. - 207 с.
- Ma, Zheng-Dong A Track-Wheel-Terrain Interaction Model for Dynamic Simulation of Tracked Vehicles/ Zheng-Dong Ma, N. C. Perkins // Vehicle System Dynamics: International Journal of Vehicle Mechanics and Mobility. - 2002. - Vol. 37, № 6. - P. 401-421.
- Аврамов, В.П. Динамика гусеничной транспортной машины при установившемся движении по неровностям / В.П. Аврамов, Н.Б. Калейчев. - Харьков: Изд-во Харьковского гос. унта, 1989. - 111 с.
- Держанский, В.Б. Исключение параметрических резонансных колебаний в движителе быстроходных гусеничных машин./ В.Б. Держанский, А.И. Тараторкин, И.А. Тараторкин // Маш иностроение: сетевой электронный научный журнал. - 2015. - Т. 3. № 4. - С. 13-20.
- Козлов, А.Г. Опорные катки гусеничных маш ин (Конструкция и расчет) / А.Г. Козлов. -Маш гиз, 1947.
- Колесников, К.С. Теория колебаний: Учеб. Для вузов /К.С. Колесников - Москва: Изд-во МГТУ им. Н.Е. Бауман, 2003. - 272 с.
- Патент РФ 122353 Гусеница транспортной машины / В.Б. Держанский, И.А. Тараторкин, А.И. Тараторкин и др.; патентообладатель: ООО "Научно-исследовательский институт "Мехмаш" (RU). - № 2012132806/11, заявл. 31.07.2012, опубл. 27.11.2012 г.
