Исследование параметров и расчет бюджета радиолинии в наземной системе ближней навигации на основе псевдоспутников

Автор: Р.Б. Ковалев, В.Н. Ратушняк, П.Ю. Зверев
Журнал: Космические аппараты и технологии.
Рубрика: Космические услуги
Статья в выпуске: 2, 2019 года.
Бесплатный доступ
В настоящее время большая часть работы специалистов в области навигации сводится к улучшению таких параметров навигационных систем, как помехоустойчивость и точность. Во всем мире сейчас все более актуален интерес потребителей высокоточной навигационной информации и производителей аппаратуры к системам ближней навигации, являющихся дополнением к существующим спутниковым радионавигационным системам, позволяющим увеличить их точность и помехоустойчивость. В статье проведена оценка параметров и обобщенный алгоритм расчета радиолинии в системе ближней навигации на основе псевдоспутников. Разработана модель расчета энергетики радиолинии при различных конфигурациях расположения псевдоспутников. Разработанная программа расчета характеристик радиолиний системы ближней навигации на основе псевдоспутников позволяет быстро оценивать не только ее энергетические характеристики, но и реализует наглядную визуализацию результирующей диаграммы направленности системы псевдоспутников в соответствии с конфигурируемой зоной навигации потребителей и требуемым уровнем мощности навигационных сигналов в условиях естественных радиотрасс.
Радионавигационная система ближней навигации, псевдоспутник, радиолиния наземных псевдоспутников, потери распространения навигационных сигналов, локальные системы навигации
Короткий адрес: https://sciup.org/14114638
IDR: 14114638 | УДК: 527.8 | DOI: 10.26732/2618-7957-2019-2-101-106
Research of parameters and calculation of the budget of the radio line in the ground-based system of near navigation on the basis of pseudo-satellites
At present time the most of the work of specialists in the field of navigation is to improve the parameters of navigation systems such as noise immunity and accuracy. At all the world is more and more actual the interest of consumers of high-precision navigation information and equipment manufacturers to near navigation systems, which are an addition to the existing satellite radio navigation systems, allowing them to increase their accuracy and noise immunity. Assessment the parameters is made in the article and algorithm for calculating the radio line in the near-navigation system based on pseudosatellites is generalized. A model for calculating the energy of a radio line has been developed for various configurations of the location of pseudosatellites. The developed program for calculating the characteristics of radio lines of a near-navigation system based on pseudo-satellites allows to quickly evaluate not only its energy characteristics, but also realizes pictorial visualization of the resulting directional diagram of pseudo-satellite systems in accordance with the configured navigation zone of consumers and the required power of navigation signals in natural radio routes.
Текст статьи Исследование параметров и расчет бюджета радиолинии в наземной системе ближней навигации на основе псевдоспутников
Важной частью проектирования систем ближней навигации на основе псевдоспутников является анализ бюджета канала распространения навигационных сигналов между передатчиком и приемником сигнала. В настоящее время все больше проявляется интерес потребителей высокоточной навигационной информации и производителей аппаратуры к системам ближней навигации, являющихся дополнением к существующим спутниковым радионавигационным системам (СРНС), позволяющим увеличить их точность и помехоустойчивость. Для повышения данных показателей и требуемой безопасности на ответственных участках навигации подвижных объектов всех классов предлагается использовать распределенную радиотехническую систему (РРС) на основе «псевдоспутников» наземного базирования, ис-
пользующей аналогичные сигналы навигационных космических аппаратов (НКА).
В таких радиотехнических системах ближней навигации на основе псевдоспутников (ПС) в настоящее время предполагается интеграция приема сигналов ПС с существующими навигационными сигналами СРНС, и по своей функциональной структуре приемная аппаратура потребителей (антенная система, аналоговый и цифровой тракты) должна обеспечивать надежный прием как сигналов СРНС, так и навигационных сигналов ПС. Данная интеграция не приведет к кардинальным изменениям навигационной аппаратуры потребителей (НАП), а только лишь дополнится цифровой обработкой сигналов ПС.
Исходя из границ динамического диапазона НАП и геометрической зоны навигации объектов, а также возможностей формирования требуемых диаграмм направленностей передатчиков ПС (например, в местности со сложным рельефом), требуется сконфигурировать расположение ПС в РРС ближней навигации таким образом, чтобы зону навигации охватывали все ПС и их резуль-
2618-7957
ОСМИЧЕСКИЕ АППАРАТЫ И технологии имина
Том 3
тирующая диаграмма направленности перекрывала зону навигации с требуемым уровнем мощности навигационных сигналов от –165 дБВт до – 140 дБВт. Мощность навигационных сигналов в пределах зоны навигации РРС не должна иметь больших колебаний, поскольку сигналы ПС на близкой дистанции действуют как источники помех, а на большой дистанции имеют недостаточную мощность для их эффективного использования. Следовательно, при конфигурировании искусственного навигационного поля РРС на основе ПС распределение энергетики радиолинии в зоне 102 навигации потребителей определяется исходя из размеров зоны навигации потребителей, уменьшения погрешностей измерения радионавигационных параметров сигналов, а также исключения перегрузки приемных трактов потребителей мощными полезными сигналами.
примерно до 90 % задержки, соответствующей
преимущественно гидростатическому компоненту, однако остальные 10 % (в основном из-за влажного компонента) будут серьезно влиять при высокоточ-
ном определении местоположения.
Мощность сигнала PС , принимаемого антенной с эффективной площадью S пр, на расстоянии R от источника излучения с изотропной излучающей антенной в безвоздушном пространстве
определяется из выражения:
c
P пер
4π R 2 пр ,
где P пер – мощность передающего устройства, Вт;
S пр – эффективная площадь приемной антенны, м2.
Для ПС, антенна которого обладает усилением G пер в направлении R,
1. Бюджет радиолинии в радионавигационной системе на основе псевдоспутников наземного базирования
Проанализируем зависимость мощности навигационного сигнала, принимаемого НАП, от угла места ПС, коэффициента усиления передающей антенны, затухания сигнала в свободном пространстве и затухания, вносимого тропосферой. Затухание амплитуды навигационных сигналов связано с их рассеянием, главным образом, кислородом, парами воды и так называемыми гидрометеорами. Зависимости поглощения от температуры, давления, влажности и частоты получены Ван Флеком в разработанной им теории поглощения электромагнитных волн [1].
Тропосфера является недиспергирующей средой вплоть до частот 15 ГГц, поэтому величина задержки одинакова для наблюдений на частотах 1–2 ГГц как для измерений псевдодальностей, так и для фазы несущей. При моделировании принято выделять две составляющие тропосферы – сухую (гидростатическую) и влажную.
Значение сухой составляющей для зенитного направления ПС, находящегося на высоте 5000 метров, составляет около метра и зависит только от давления и температуры, а величина влажной составляющей может колебаться до нескольких сантиметров и зависит, главным образом, от влажности. При переходе от зенитного направления к наклонным направлениям задержка увеличивается примерно пропорционально секансу угла места, достигая вблизи горизонта (при удалении от ПС на 50–60 км) до 5 м. Тропосферную задержку можно вычислить, используя значения температуры, давления и влажности, которые являются входными данными для одной из многих моделей атмосферной рефракции. Такие модели могут учитывать
P c =
пер пер
4π R 2 пр .
Эффективная площадь антенны является параметром, характеризующим качество антенн. Чтобы перейти от площади антенны к коэффициенту усиления G пр, можно воспользоваться формулой:
S пр = G пр λ 2 , 4π
где λ – длина волны излучаемого сигнала, м.
c
В этом случае с учетом (3) и того, что λ = , где f –несущая частота излучаемого сигнала, а с – скорость света (c = 299 792 458 м/с), формула (1)
запишется в следующем виде:
PGG пер пер пр cL
. ( fл2
где L = (4л) 2 R 2 I I
V c )
бодном пространстве.
– затухание сигнала в сво-
Трасса распространения сигнала от ПС до НАП включает в себя тропосферу, которая вносит затухание B тр. Учитывая это затухание, перепишем формулу (4):
пер пер пр LB тр
или, в логарифмической форме:
10lg( Pc ) = 10lg( Р пер ) + 10lg( G nep ) + .
+ 10lg( G np ) - (10lg( L ) + 10lg( B T)) ■
Тропосфера простирается до высот 8–10 км в полярных широтах, до 10–12 км – в умеренных широтах и до 16–18 км – в тропиках.
Для рассматриваемой длины волны λ ≈ 18,7 и 24 см затухание радиоволн в тропосфере незна-
чительно и его можно не учитывать при наблюдении ПС при больших углах места, где величина проходимого расстояния в тропосфере незначительна. На малых же углах места ПС доля тропосферы на трассе распространения сигнала резко увеличивается и ее влиянием пренебрегать уже нельзя.
Поглощение и рассеяние волн в тропосфере ведет к снижению плотности потока мощности радиоволн с расстоянием по экспоненциальному закону. Коэффициент поглощения в тропосфере B тр зависит от коэффициента затухания αз, измеряемого в дБ/км, и расстояния R тр, проходимого радиоволнами в тропосфере:
B тр = exp(0,23a ^ тр ) . (7)
Коэффициент α зависит, прежде всего, от длины волны (рис. 1) и погодных условий. На волны длиннее 10 см метеорологические условия существенного влияния не оказывают, поэтому будем считать, что коэффициент αз вдоль всей трассы постоянен.
По различным источникам [2; 3] значение коэффициента поглощения в тропосфере колеблется от 0,008 до 0,01 дБ/км. Согласно [1], значение коэффициента αз для длины волны λ ≈ 18,7 см приблизительно равно 0,007 дБ/км, для длины волны λ ≈ 24 см – 0,005 дБ/κм.
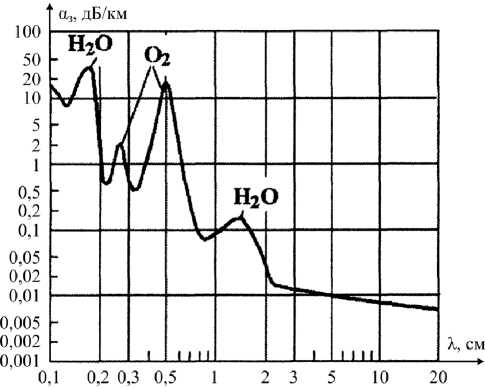
Рис. 1. Зависимость коэффициента поглощения в тропосфере от длины волны
Необходимо отметить также, что за счет возможности формирования группировкой «псевдоспутников» выделенной зоны повышенной мощности приема навигационных сигналов, можно повысить надежность навигационных определений в условиях воздействия помех и уменьшить среднеквадратическое отклонение шумовой погрешности типовой некогерентной схемы слежения за огибающей, которая определяется следующим выражением [3]:
О = Т э
к^ , к 2 П ссз П пч .P c / N 0 ( P c / N о )2
где τэ – длительность элемента кода ПС; k 1, k 2 – постоянные коэффициенты, зависящие от выбранной схемы слежения; Пссз, Ппч – односторонняя ширина полосы замкнутой схемы слежения и тракта промежуточной частоты соответственно; q cn= P c / N 0 — энергетический потенциал радиолинии (отношение мощности сигнала к спектральной плотности мощности внутреннего шума приемника).
-
2. Моделирование энергетических характеристик радиолинии системы ближней навигации на основе псевдоспутников при различных конфигурациях их расположения
-
2.1 Конфигурация 1
Проведем расчет радиолинии для различных конфигураций расположения ПС на плоскости с использованием математического моделирования и языка программирования С++.
Диаграмма распределения мощности навигационного сигнала одиночного ПС в естественной радиотрассе при P пер = 1,15·10–4 Вт представлена на рис. 2. Уровень мощности навигационного сигнала –165 дБВт соответствует внешней полусфере радиусом 70 км, а –140 дБВт соответствует внутренней полусфере радиусом ≈ 4 км.
В первой конфигурации расположим восемь ПС по периметру прямоугольника со сторонами 100x200 км, при этом они условно находятся на поверхности Земли на одной высоте. Такая конфигурация расположения ПС может использоваться для обеспечения навигации надводных объектов в морских портах, проливах, узостях рек, а также наземных объектов. На рис. 3 приведена результирующая диаграмма распределения мощности системы псевдоспутников.
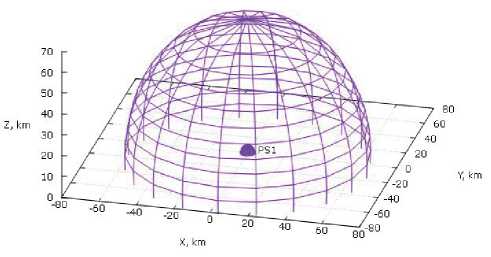
Рис. 2. Диаграмма распределения мощности навигационного сигнала одиночного ПС

Том 3
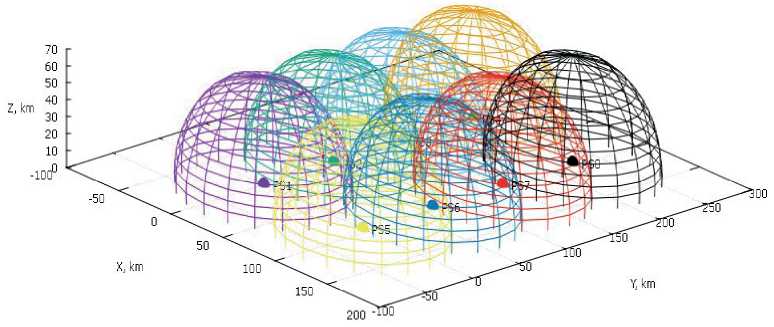
Рис. 3. Конфигурация 1: восемь ПС расположены
по периметру прямоугольника
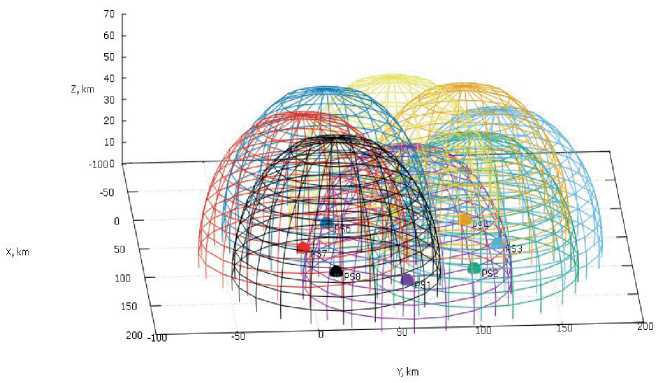
Рис. 4. Конфигурация 2: восемь ПС располагаются по окружности
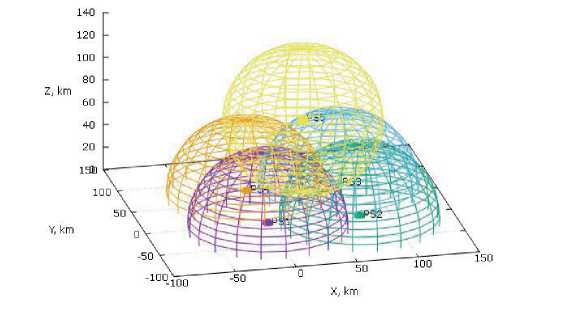
Рис. 5. Конфигурация 3: четыре ПС находятся в углах квадрата, пятый ПС поднят на высоту
-
2.2 Конфигурация 2
-
2.3 Конфигурация 3
Рассмотрим вторую конфигурацию расположения ПС на местности: восемь ПС располагаются на высоте 0 м на окружности радиусом 100 км. (рис. 4). Данная конфигурация расположения ПС может использоваться для обеспечения навигации воздушных объектов в районах аэродромов.
Рассмотрим третью конфигурацию расположения ПС – четыре ПС находятся в углах квадрата (расстояние между ними составляет 70 км), а один ПС условно поднят на высоту 65 км (рис. 5). В данном случае несколько ПС, размещенных равномерно по периметру зоны обслуживания, и 1–2 ПС, размещенных на разных высотах, обе- спечивают повышение точности измерения вертикальной координаты объектов за счет уменьшения геометрического фактора.
Заключение
Возможность создания области навигации с требуемыми характеристиками при помощи распределенной радиотехнической системы на базе псевдоспутников на ответственных участках навигации подвижных объектов всех классов ведет к улучшению таких показателей, как автономность навигации, точность измерения координат и пространственной ориентации, помехоустойчивость и безопасность движения объектов в целом.
Разработанная программа моделирования характеристик радиолиний системы ближней навигации на основе псевдоспутников позволяет быстро оценивать не только ее энергетические характеристики, но и реализует наглядную визуализацию результирующей диаграммы направленности системы псевдоспутников в соответствии с конфигурируемой зоной навигации потребителей и требуемым уровнем мощности навигационных сигналов в условиях естественных радиотрасс.
Исследование выполнено за счет гранта Российского научного фонда (проект №16-1910089).
Список литературы Исследование параметров и расчет бюджета радиолинии в наземной системе ближней навигации на основе псевдоспутников
- Долуханов М. П. Распространение радиоволн : учеб. для вузов. М. : Связь, 1972. 336 с.
- Скляр Б. Цифровая связь. Теоретические основы и практическое применение / пер. с англ.; изд. 2-е, испр. М. : Издательский дом «Вильямс», 2003. 1104 с.
- Харисов В. Н. ГЛОНАСС. Принципы построения и функционирования / под ред. В. Н. Харисова [и др.]. М. : Радиотехника, 2010. 800 с.
- Борсоев В. А., Галеев Р. Г., Гребенников А. В., Кондратьев А. С. Использование псевдоспутников ГЛОНАСС/ GPS в системах посадки воздушных судов // Научный вестник МГТУ ГА. 2011. № 164. С. 17-23.
- Тяпкин В. Н., Гарин Е. Н., Дмитриев Д. Д., Ратушняк В. Н., Фатеев Ю. Л. Оценка погрешностей измерения навигационных параметров в системе ближней навигации на основе псевдоспутников // Сборник «Радионавигационные технологии». Сер. «Радиосвязь и радионавигация». М., 2017, С. 78–84.
- Компьютерная модель системы ближней навигации на основе псевдоспутников: свидетельство о государственной регистрации программ для ЭВМ № 2017619991 Российская Федерация / Н. С. Кремез, В. Н. Ратушняк, А. Б. Гладышев, М. А. Голубятников. - № 2017616963; заявл. 14.07.17; опубл. 13.09.17.
- Гладышев А. Б., Ратушняк В. Н., Рыжков Д. Н., Богачук А. А., Голубятников М. А. Лабораторный комплекс для моделирования системы ближней навигации на основе псевдоспутников // Сборник «Современные проблемы радиоэлектроники». Сибирский федеральный университет, 2017, С. 120–124.
- Gladyshev A. B., Dmitriev D. D., Veysov E. A., Tyapkin V. N. A hardware-software complex for modelling and research of near navigation based on pseudolites // Journal of Physics: Conference Series, 2017, vol. 803, 012048.
- Голубятников М. А. Компьютерная модель навигационного поля локальной системы навигации на основе псевдоспутников // Материалы ХХ Всерос. семинара «Моделирование неравновесных систем», 2017, С. 32–36.
- Фатеев Ю. Л., Гладышев А. Б., Ратушняк В. Н., Голубятников М. А. Организация и структура радиотехнической системы ближней навигации на основе псевдоспутников // Сборник «Радионавигационные технологии». Сер. «Радиосвязь и радионавигация». М., 2017, С. 34–37.
