Исследование подрессоривания трелевочной системы

Автор: Варава В.И., Гусейнов Р.Э.
Журнал: Resources and Technology @rt-petrsu
Статья в выпуске: 7, 2008 года.
Бесплатный доступ
Излагается моделирование трех структур подрессоривания трелевочной системы. Выявляются вибронагруженность, рациональные параметры жесткости и диссипации, даются оценки структурам подрессоривания.
Моделирование, структура, дисперсия реакции шин, оптимизация, параметры жесткости и диссипации
Короткий адрес: https://sciup.org/147112184
IDR: 147112184
Research into cushioning of a skidding system
The modeling of three structures of the cushioning of a skidding system is developed. The vibratory stress loading, rational parameters of rigidity and dissipation are brought to light; estimations are given to cushioning structures.
Текст научной статьи Исследование подрессоривания трелевочной системы
Вибронагруженность трелевочной системы в вертикальной плоскости симметрии определяется структурой подрессоривания, параметрами и характеристиками упруго-диссипативных связей, уровнем и характером неровности волока (почвы).
На рисунке 1 приведена упрощенная модель двухступенчатого подрессоривания коника (КЗУ) и трактора Т40-Л с пачкой хлыстов, где: m п , m 1 , m 2 – подрессоренные массы жесткой пачки с опорной базой l , приведенной к точке 1 массой пачки ( m пк ) с массой КЗУ ( m кз), массой полурамы ( m п р ) с колесной парой ( m кп ), ( m 1 = m П + m кз, m 2 = m пр =( J т + 22
+ m т / 1 )/ / т , / т = / 1 + / 2 ); C z , Р z , c п , Р п — параметры жесткости и диссипации подвеса КЗу и шин КП. Приведенная к точке <К> масса пачки определяется из баланса кинетических энергий для z , = l x ф:
1 Авторы — соответственно профессор кафедры теоретической и строительной механики и студент V курса Санкт-Петербургской государственной лесотехнической академии, кафедра технологии лесозаготовительных производств.
2T = Jo
Трактор Т40-Л имеет инерционную квазисимметрию, J r ~ m т / 1 / 2 относительно осей z 0, z 1 . Поэтому вертикальные его колебания разделяются на независимые, одномерные с приведенными к осям z o, z 1 массами: m п 0,1 ) = ( J т + m т / 1 0 ) I l .2 .
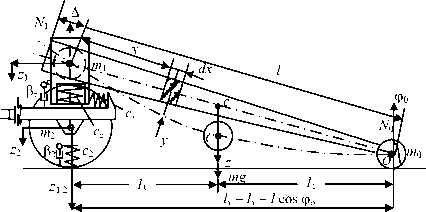
Рис. 1. Расчетная модель подрессоривания трелевочной системы
Уравнения состояния введенной системы для жесткой пачки составим по рисунку 1 в новых координатах деформациях связей x1 = z1 -z2, x2 = z2 -zк :
z2 = x2 + zк, z1 = X1 + z2 = X1 + x2 + zк.
Тогда кинетическая и потенциальная энергии системы:
2 Т = m ^ z ^ + m 2 z 2 =
= m1( x + x 2 + ^ )2 + m 2( x 2 + ^&к ) 2 ,
2 П = C 1 x 2 + c 2 x 2 , 2 R = Р 1 x 2 + Р2- x 2 .
Вводя их в уравнения Лагранжа d d T d T 8ПdR
----+—+— = Q j , dt dx i dX i dX i d ;& i J
получим:
I m 1 x 1 + m X x 2 +p 2 x 2 + c 2 x 2 =- m X z к .
Вычитая из второго уравнения первое, запишем другое представление
' m i ( x i + x 2 ) + P ijq + qx i = - m i z k ,
" m 2 x2 - P i- x i - c i- x i + P 2 x 2 + c 2 x 2 = (5 б )
l = - m 2 z к .
или в операторно-матричном виде при d / dt = p :
m i P 2 +P i P + c i m i P 2 I- m i P 2 z k (P)
m2 P 2 + i 2
-
- ( P i P + c i ) i- m 2 P 2 z k ( P )
I +P2 P+c2\J
При жестком креплении коника на полураме ( C z = да ) уравнения (5) упрощаются:
m^ X2 +PX2 + cx 2 = -m2 zk.
Для передаточной функции П 2 = x 2 ( р ) / Z к (р ) =
-
—m ^ p
= 2 и спектральной плотности не- m^p2+Pp+c ровности пути Sк = В4V3 / to4 дисперсии деформации, скорости и реакции подвеса по формулам Винера – Хинчина равны:
n да
Dx. = :НЫ i to )2 d to | = B / C ₽ ,
-
2 2n -
-да
B 2 2
DX 2 = 2 n J । П 2( i to ) to d to | = B / m 2 в (8)
-да
D r = c 2 D x 2 +P 2 D x 2 = B [ c / p+p/ m 2 ],
B = 0,5 В 4 v 3 = m 2 . (9)
Дисперсия реакции КП представляет здесь интегральную критериальную функцию вертикального взаимодействия шины и почвы (волока), т. е. функционал.
Он пропорционален возмущению пути В , сомножителю cm - и имеет минимум по параметру демпфирования Р ввиду его диссипативного и возмущающего действия: при Р = 0 или Р « да Dr = да .
Минимизация функционала Dr ( Р ) по параметру Р дает оптимальное значение последнего:
D r = min, d Dr / dp = 0, P = ^cm 2 , Р кр = 2 Pm , 9 m =P / Р к р = 0,5;
P = 2 9 ^cm ^ , m 2 = m i + m 2 , (i0)
где 9 = 0,5 — коэффициент диссипации (демпфирования) в долях от критического значения парциальной системы.
Значение 9 m = 0,5 значительное. Поэтому при пологом минимуме его можно принимать за максимальное и допускать снижение в процессе наработки демпфера до 9 min — 0,3; А9 = 0,5...0,3. Однако в шинах внутреннее трение между волокнами резинокордной оболочки ограничено:
-
9 < 0,i; р < 0,2 Cm^ . (ii)
Для максимальной диссипации (11) функционал (9) составляет:
D r = 5,2 В Cm2; = 5,2 В v , v 2 = c / m 2 , (i2)
где v — собственная частота подрессоренной массы m 2 .
Для исходных данных трактора Т40-Л ( m 2 = = 2820 кг, с = (i2/9) • i05 Н/м, параметры (12, 11) равны:
v= 7 c / m 2 = 2i/i8, c — i,
P = 0,2V cm 2 = ii,6/i0,i кНс/м. (i3 а )
Очевидно, что при высокой жесткости шин завышена собственная частота подвеса. Упругая реакция шин задней колесной пары (КП,8) равна:
Q = c CT x = V5 B v = (7,25/6,7) m 2 V B ч v 3, m 2= 2820 кг. (i3 б )
Она вырастает со скоростью движения v и ухудшением качества пути В ч , пропорциональна подрессоренной массе.
Частотное уравнение системы (5, Р i = 0, р = i X )
А = mim 2[X 4-X 2(v2 +v2) +
2 (14)
+ v l c 2 / m 2 ] = 0,
ν12=c1/m1,ν22=c2/m2, где ν1, ν2 — парциальные частоты системы. Отсюда частоты системы
2 λ 1 2 2 =ν 1 2 +ν 2 2 ± ( ν 1 2 +ν 22)2 + 4 ν 1 2 c 2 . (15) , m 2
Для m 1 = 1100 кг, m 2 = 1720 кг, c 1 = 190 ⋅ 103, c 2 = 900 ⋅ 103 Н/м по формулам (14, 15):
ν 1 2 = 170 ( ν 1 = 13 c - 1), ν 2 2 = 630( ν 1 = 25, 2с - 1),
λ 1 = 11,6 с–1, λ 2 = 25,8 с–1. (16)
Частоты системы близки одноименным парциальным значениям. При этом низшая частота, определяющая гибкость подвеса, ощутимо ниже (13 а ).
Передаточная функция (ПФ) радиальной деформации шин по матрице (6) и Крамеру для µ о = 1 + m 1 / m 2 равна:
η2(p)=x2(p)= Δ2(p) = zк(р) Δ(p)⋅zк(р) (17)
=- m 2 p 2[ m 1 p 2 +µ o( β 1 p + c 1)]/ Δ( p ) , Δ ( p ) = m 1 m 2 p 4 + p 3( m 1 β 2 +β 1 m 2) +
+ p 2( m 1 c 2 + c 1 m 2 +β 1 β 2) + p ( β 1 c 2 + (18)
+ c 1 β 2) + c 1 c 2.
Дисперсия радиальной реакции шин КП для спектра воздействия пути S к = В ч v 3 / ω 4 по Винеру – Хинчи-ну
22 B ч v 3 m 2 2 c 2 2
D2 = c2 °x2 □ 2n
∞ m12(i ω )4 - (i ω )2( µ o β 1)2 × d ω=
-
-∞ | Δ (i ω )|2
-
=12 Bчv3m22c22⋅m1×
m2 µ o 2 β 12/ β 2m1 + m1c2/ β 2 +
× + m1c1/ β1+µ2oβ1.
(c2m1 - c1m2)2
Она пропорциональна возмущению В ч v3, квадратам 22 параметров инертности (m 2 ) и жесткости (c 2 ).
Решающим фактором снижения нагруженности здесь является исключение нуля знаменателя (19):
c1 m1/m2⋅ c2/3, c1≤900/3⋅1,1/1,72 130 кН/м. (20) Оптимальная диссипация в подвесе коника выявляется минимизацией дисперсии реакции:
Dr2 = min, ∂ Dr2/ ∂β 1 = 0, (21а)
в 1 □— J c mi , в 1 = 8,8 кНс/м. µ o
В долях от критического значения β кр = 2 с 1 m 1 она равна
ϑ=β 1 / β кр = 1/2 µ o = 0,3. (21 б )
В долях от параметра β 2 ≈ 0,2 с 2 m 2 =
= 7,8 кНс/м имеем:
в 1 □ 3 m 2 с 1 в2(2Цо m 2Г 1 = 5,8 кНс/м. (21 в )
Из сравнения (19) с учетом (20, 21) следует конкретная реакция шин КП для β 2 = 0,2 с 2 m 2 = = 7,8 кНс/м, m 2 = 1720 кг:
Q = c 2 °r □ m 2 -^B ч v 3 x
× c 2/ β 2 + c 1/ β1 = 11,7 m 2 B ч v 3.
Сопоставление этого решения с (13 б ) показывает близкие результаты одно- и двухступенчатого подвеса. Здесь во втором случае отразился гибкий подвес меньшей массы m 1 < m 2 . Сказалось также малое расхождение парциальных частот: с 2 / m 2 ≳ 3 c 1 / m 1 , ν 2 ≥ 3 ν 1.
Примем в модели рис. 1 пачку хлыстов упругой с базисной функцией изгиба f(x) = sin πx / 2xc = = sin 3πx / 2lx. Введем координаты вращательного движения неизогнутой оси пачки z1 = z1 (1 – x / lx), Z1 = Zi(1 — X/lx) и относительного движения
l
2T = J (z+y )2 dm + m к z2 + m 2 z2, (23) В п mi = mi + m кз,
l
2 П = J EI ( x ) y "2( x ) dx + q( z i - z 2 )2 + d
+ c 2( z 2 - z к) 2.
Разлагая по Фурье у ( x , t ) = f ( x ) q ( t ) и вводя в (23), получим
2 -2 .2
2T = mq + mizi + 2mпziq + m2z2, (24) 2 П = Cq 2 + ci( zi- z 2)2 + c 2 ( zi- z к ), ll где m =J f 2( x) dm, mi = J (1- x /1 )2 dm, d 0
l mx = J (1-x /1) f (x) dm, 0 l c=J EI ( x ) f "2( x ) dx.
где m , m 1 , m п — массы изгибных колебаний пачки, ее вращения ф — z i / 1 и инерционной связи двух движений ф , у ; С - эквивалентная жесткость изгибных колебаний пачки.
Вводя в интегралы (24) функцию изгиба пачки массой m п — 2400 кг, 1 х — 1 3 + 1 4 — 6,8 + 10,2 — — 17 м и параметры 1 о — П / 4 Г 4 ■ n , S о = П Г 2 n , dm = р dV = р S ocos23 n x /2 1 п, I ( x ) = I о х X COS4 3nx / 2 1 п, получим эквивалентные массы и жесткости:
m = 0,37 m п = 880 кг, mi = m^ + m кз = 0,31 m п + 70 = 820 кг, (25) mи = 0,3 5mп = 820 кг, m2 — 1720 кг;
с — 28 EI о / 1 п = 150 кН/м, c 1 — 190, c 2 — 900 кН/м, P 2 — 0,2 ^с 2 m 2 = 7,8;
в — 0,12 4cm = 1,4 кНс/м.
Вводя квадратичные энергетические функции в уравнения Лагранжа (4) относительно координат q, xi — — zi - z2; z2 — x2 + zK, zi — xi + x2 + zк, получим mq+mH(xi + x2)+cq+P q=-mиZк
< m H q+m^ + x 2 ) + c i x i +P i x i =- mz (26) ^ m2 x 2 + c 2 x 2 +в 2 - x 2 - c i x i -P i - x i =- m 2 Z к .
При Ci — TO, xi — 0; x2 — x, получим упрощенную систему с гибкой пачкой на шинном подвесе для m2 + mi — m^ — 2540 кг mq+P (q+cq+m и x=- m и zk
< (27 а )
m и q+m 2 x+P2 5c+c 2 x=- m 2 zk или, в операторно-матричной форме, -
Л mp 2 +P p + c mи P 2 - m и P 2 z K (P )
X m H P 2 m s P 2 +p 2 P + c 2 - m s P 2 z K ( P ) у
. (27 б )
Определитель системы
А = [ m д P 4 + P 3 ( p 2 +Цр ) + P 2 ( c 2 +Ц С +
\28)
+ PP2 /m)+pc2(P+rP2)/m+cc2 /m]■ m, где mд = ms -mи /m = i776 кг, ц — ms / m — — 2,9; £ — с / с2 — 0,i7.
Частотное уравнение при р — i X , P i — 0 и частоты системы
4 2
А о = m д Х - ( c 2 +Ц c ) X + cc 2 / m = 0,
-
2 m А Х 2 ,2 =
-
- !----------2----------------(29)
= [( c 2 +Ц c ) + д/( c 2 +Ц c ) - 4 cc 2 m д / m .
Для исходных данных (25, 28) имеем: V — V с / m = — i7 с -1 ; V 2 — 7 c 2/ m s — 35,4 c -1 ; X 2, 2 = — 142/610, X i — 11,9 с-1, X 2 — 24,7 с-1.
Получена амортизированная система при ограниченных параметрах диссипации в пачке и шинах: в = = 1,4; Р 2 = 7,8 кНс/м. Причем частоты Z 1 , Х 2 близки соответствующим частотам (16) квазиступен-чатого подвеса коника с жесткой пачкой. Однако во втором случае диссипация в конике (21 а ) ощутимо выше, чем в пачке (25).
Передаточная функция радиальной деформации шин по матрице (27 б ) и Крамеру
П X ( Р ) = x ( Р У z к ( Р ) =
Д X ( Р ) = д ( Р ) z к ( р )
=- Р 2 ms (ц Omp 2 +рР+cУ д( p X цп =1-m„ / my = 0,68; • О и 4-i ' '
в2 +Цв = 1,5в2, в + ^в2 = 2в, Р<<Р2.
Дисперсии деформации и реакции шин КП для спектра воздействия пути S к = D и V 3 / to 4, Ц = m s / m = = 2,9; 8 = с / с 2 и параметров инертности системы (28, 25):
∞
D x = ~ I П x ( i to )l S к ( to ) d to =
2n J
-∞
∞ ∫ -∞
2 m = D ч v "^х 2 n
2 2z- \4 z-..x2
ц 0 m ( i to ) + 2 c ц 0 m ( i to ) + c
I Д ( i to )|2
. 2
— d to ;
Параметры жесткости c и диссипации здесь практически неуправляемы, но теоретически могут быть вычислены минимизацией дисперсии реакции шин (30). Для исходных их значений (25) среднеквадратическое значение реакции равно:
ст r = 7,75 m s ^ B ч v 3. (31)
Этот результат совпадает с меньшим решением (13 б ) шинного подвеса с жесткой пачкой. В итоге гибкость пачки при одноступенчатом шинном подвесе не оказывает ощутимого влияния на вибронагруженность шин.
ВЫВОДЫ
Исследованы три структуры подрессоривания МТА с пачкой и получены одинаковые вибронагруженности МТА и пути (почвы). Это объясняется значительными ограничениями (20) на отношения жесткости шин и подвеса коника. Если они не реализуются, то остается лучшим по конструктивному исполнению одноступенчатый шинный подвес с минимально возможной жесткостью. Это достигается заменой обычных шин широкопрофильными с низким давлением.
Список литературы Исследование подрессоривания трелевочной системы
- Варава В. И., Гусейнов Э. М. Снижение нагруженности колесных лесохозяйственных машин и лесной почвы./В. И. Варава, Э. М. Гусейнов. СПб.: Изд-во СПб. гос. ун-та, 2005. 324 с.
- Морозов С. И., Морозов В. С. Соударение тел. Контактная и универсальная теории удара./С. И. Морозов, В. С. Морозов. Архангельск: Изд-во Архангельского государственного технического университета, 2007. 123 с.
