Исследование подвижности быстроходной гусеничной машины при движении по заданной трассе

Автор: Кондаков Сергей Владимирович
Рубрика: Расчет и конструирование
Статья в выпуске: 10 (186), 2010 года.
Бесплатный доступ
Приведены результаты имитационного моделирования движения машины при управлении штурвалом в функции пути, описанном последовательным набором участков различной кривизны. Проиллюстрировано преимущество автоматизированной системы управления поворотом при прохождении заданной на местности трассы.
Быстроходная гусеничная машина, математическая модель, гидрообъемная передача, механизм поворота, кривизна траектории, повышение подвижности, критерий управляемости, алгоритм управления, автоматизация, координаты на местности
Короткий адрес: https://sciup.org/147151487
IDR: 147151487 | УДК: 629.114.2
Researching of high-speed caterpillar machine's mobility while moving along the trace, having definite coordinates on surface
The author considers the results of researching of high-speed caterpillar machine mobility while moving along the trace, having definite coordinates on surface. The article describes advantages of turning mechanism automation.
Текст научной статьи Исследование подвижности быстроходной гусеничной машины при движении по заданной трассе
Все результаты имитационного моделирования, приведенные в работах автора [1-4], основаны на формировании управляющего воздействия в виде поворота штурвала во времени. Допустимы любые отклонения штурвала от положения «прямо», поэтому модель позволяет сформировать любой набор интересующих исследователя траекторий, разнящихся по кривизне. Более того, при каждом изменении положения штурвала во времени отслеживается ошибка управления, то есть отклонение кривизны траектории на местности от той, что задает штурвал.
Проведенные исследования показали положительный эффект от внедрения дополнительного регулирования наклонной шайбы гидрообъемной передачи (ГОП), двигателя и тормозов, обеспечивающего выигрыш по трем параметрам: точность управления криволинейным движением, предотвращение заноса и повышение средней скорости движения.
Однако не рассмотрены вопросы вписываемости машины в ограниченный коридор. При сложившемся подходе к формированию управляющего воздействия во времени, невозможно ответить на вопрос: впишется ли машина в заданный коридор. Исследование прохождения машиной заданной трассы проведено методом последовательных итераций через корректировку упреждения. Введение автоматизированной системы управления криволинейным движением быстроходной гусеничной машины (БГМ) позволило машине копировать на местности управляющее воздействие штурвала.
В связи с этим выдвинуто предположение, что и обратная задача - поворот штурвала по «кривизне дороги под колесами» имеет решение и в совокупности с автоматизацией системы управления поворотом может обеспечить точное прохождение трассы.
В данной статье предложено изменить представление о процедуре формирования управляющего воздействия (по-прежнему поворота штурвала): отказаться от функции времени и перейти к функции пути.
Определенную сложность составляет математическое описание дороги (трассы). На первый взгляд это зависимость Y(X), соответствующая реальной трассе. Математическое описание такой
Расчет и конструирование
зависимости громоздко. С другой стороны, однозначно описать трассу можно и без координат X и Y, достаточно разбить ее на участки известной кривизны. В упрощенном виде это перечень участков постоянной кривизны. Например, 50 м прямо (кривизна 0 м”1), затем 40 м с кривизной 0,06 м"1, затем 30 м с отрицательной кривизной 0,04 м"1 (поворот в другую сторону) и т.д. Возможна непрерывная функция K(S). Подобный подход просматривается в работах Академии бронетанковых войск [5].
В соответствии с этим в имитационную модель внесены следующие дополнения:
-
1) пройденный путь интегрируется от скорости центра тяжести машины;
-
2) траектория движения на местности оговаривается математически как функция кривизны от пройденного пути K(S);
-
3) поворот штурвала производится автоматически от «кривизны траектории под колесами», то есть кривизны траектории на местности в момент прохождения машины.
Очевидно, что обычная машина (прототип без автоматизированной системы управления криволинейным движением), требует упреждающего поворота штурвала, так как утечки ГОП и буксование гусениц не позволяют мгновенно или достаточно быстро довести информацию о грядущем повороте дороги до ведущих колес и реализовать ее в поворот корпуса.
Выдвинута гипотеза, что автоматизированная система управления поворотом позволит надежно вписываться в ограниченный коридор при гораздо больших скоростях и без упреждения по управляющему воздействию. Опытный механик-водитель следит за дорогой на определенной дальности, но поворачивает штурвал только при начале изгиба дороги, упреждать поворот дороги поворотом штурвала он вынужден только для компенсации недостатков, правильнее сказать - особенностей механизма поворота и гусеничного движителя, а именно утечек ГОП, потерь на буксование и прочих внешних помех. Без упреждения машина проскакивает начало поворота дороги и уходит с трассы, что будет проиллюстрировано результатами имитационного моделирования.
Аналитические зависимости имеют следующий вид.
Путь S = J VQdt , где S - путь, пройденный центром тяжести, Vo - вектор скорости центра тяжести. Кривизна в функции пути:
^(5) = 0,06, если S >50м.
Управление штурвалом задано в функции кривизны:
K(sYi5-B-k
^кп ' ^2
где <2, is - постоянные передаточные числа в трансмиссии, i^ - передаточное число коробки передач, В - поперечная база машины, к - параметр суммирующего планетарного ряда.
Результаты имитационного моделирования движения по заданной трассе БГМ, оборудованной автоматизированной системой управления поворотом, приведены на рис. 1-3. Скорость движения - 10,5 м/с (3 передача). Максимальная ошибка управления меньше 10 % в течение 2 с не
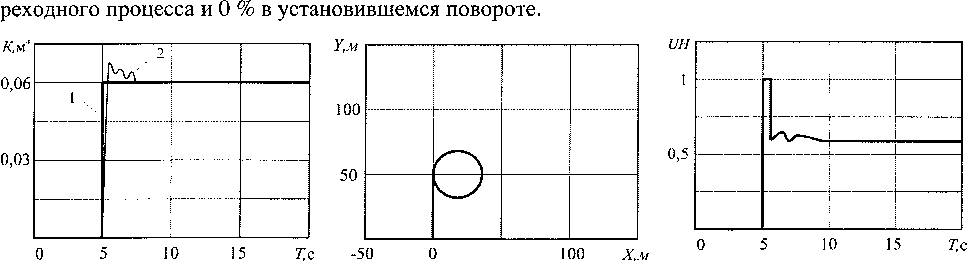
Рис. 1. Кривизна дороги (1) и кривизна траектории движения на местности (2) при наличии автоматизированной системы управления поворотом в функции времени Т
Рис. 2. Траектория движения машины. Уместно сравнить ее с оговоренной дорогой (50 м прямо, потом поворот с радиусом 16 м): расхождение в несколько процентов
Рис. 3. Положение наклонной шайбы ГОП при повороте с автоматизированной системой управления поворотом
Кондаков С.В.
Далее на рис. 4-6 приведены аналогичные графики для машины-прототипа без опции дополнительного регулирования наклонной шайбы ГОП. Дорога та же: 50 м прямо, потом поворот с радиусом 16 м. Качество прохождения трассы существенно хуже. Машина должна уйти в занос, но его предотвращает неотключенная опция торможения забегающего борта и торможение двигателем при угрозе заноса.
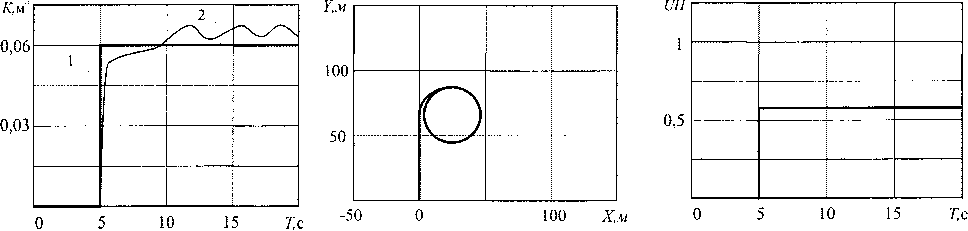
Рис. 4. Кривизна дороги (1) Рис. 5. Траектория движения БГМ Рис. 6. Положение наклонной шайбы и кривизна траектории движения на местности (2)
Машина начала поворачивать через 5-7 м после поворота дороги, и радиус траектории установился на 2-3 м больше, чем задан штурвалом (рис. 5).
На рис. 7-9 приведены графики для машины-прототипа в аналогичных условиях, но при отключении еще и опций торможения забегающего борта, регулирования подачи топлива и торможения двигателем. Машина уходит в занос.
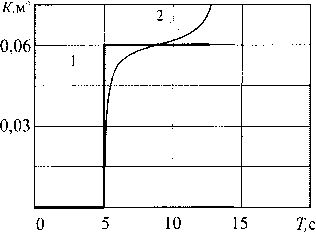
Рис. 7. Кривизна дороги (1) и кривизна траектории движения на местности (2)
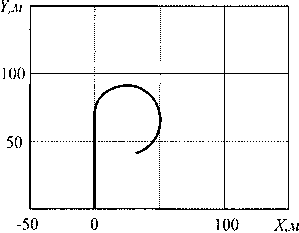
Рис. 8. Траектория движения машины
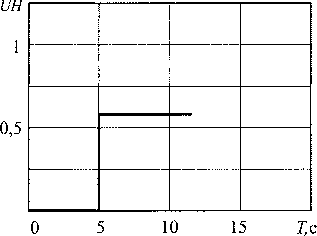
Рис. 9. Положение наклонной шайбы ГОП
Оговоренную трассу машина-прототип (без автоматизированной системы) может преодолеть без заноса на 2 передаче со скоростью 6,8 м/с (на 35 % медленнее). При этом ошибка составляет 30 % как в переходном процессе, так и в установившемся повороте.
Выводы
-
1. Имитационная модель получила дальнейшее развитие и показала работоспособность при формировании управляющего воздействия не в функции времени, а в функции кривизны траектории.
-
2. Подтверждена гипотеза о том, что АС обеспечивает прохождение ограниченного коридора без упреждения со стороны водителя.
-
3. Машина-прототип не может пройти заданную на местности трассу, требует упреждения, не удерживается на окружности радиусом 16 м, уходит в занос.
Таким образом, доказана принципиальная возможность имитации движения по заданной трассе и расширены возможности исследования криволинейного движения и совершенствования механизмов поворота.
Список литературы Исследование подвижности быстроходной гусеничной машины при движении по заданной трассе
- Кондаков С.В. Имитационное моделирование криволинейного движения быстроходной гусеничной машины с системой динамической стабилизации поворота: сб. науч. тр., посвященный 100-летию со дня рождения М.Ф. Балэюи/С.В. Кондаков. -Челябинск: Изд-во ЮУрГУ, 2008. -С. 95-100.
- Кондаков С.В. Повышение подвижности быстроходной гусеничной машины путем автоматизации системы управления криволинейным движением: дис.... д-ра техн. наук/С.В. Кондаков. -М.: МГТУ им. Н.Э. Баумана. -2009.- 302 с.
- Кондаков С.В. Повышение подвижности быстроходной гусеничной машины путем автоматизации механизма поворота/С.В. Кондаков//Вестник ЮУрГУ. Серия «Машиностроение». -2009. -Вып. 14. -№ 33(166). -Челябинск: Изд-во ЮУрГУ. -С. 38-44.
- Кондаков С.В. Повышение подвижности быстроходной гусеничной машины путем автоматизации системы управления криволинейным движением: монография/С.В. Кондаков. -Челябинск: Изд-во ЮУрГУ, 2009. -110 с.
- Оценка подвижности объектов бронетанковой техники. -М.: Изд-во ВА БТВ, 1977. -110 с.
