Исследование путей создания универсальной малогабаритной транспортной платформы для мобильных мини-роботов

Автор: Васильев Андрей Викторович
Журнал: Космические аппараты и технологии.
Рубрика: Робототехника и мехатроника
Статья в выпуске: 3 (13), 2015 года.
Бесплатный доступ
Анализируются различные виды малогабаритных транспортных платформ (МТП). Рассматриваются предпосылки для создания и особенности мобильных мини-роботов (ММР), функционирующих в городских условиях. Приводятся разработки ЦНИИ РТК в области создания подобных МТП, а также концепция универсальной реконфигурируемой МТП для ММР с высокими функциональными и адаптационными возможностями. Созданные экспериментальные образцы не уступают по своему техническому уровню лучшим зарубежным и отечественным аналогам.
Транспортная платформа, мобильный мини-робот, носимый, лёгкий, компактный, гусеничный, колесный, модульный, настраиваемый, реконфигурируемый
Короткий адрес: https://sciup.org/14117354
IDR: 14117354 | УДК: 007.52
Development ways research of the universal small transport platform for ground mobile mini-robot
Different types of small-sized transport platforms (STP) are analyzed. Development background and particularity of mobile mini-robots (MMR) for operating in urban conditions are considered. CRDI RTC development studies in such area and universal reconfigurable STP concept for MMR are displayed. Constructed experimental models are not inferior in its technical level of the best foreign and domestic analogues.
Текст научной статьи Исследование путей создания универсальной малогабаритной транспортной платформы для мобильных мини-роботов
приводов, компонентов систем управления, вычислительных модулей, датчиков различной природы, источников питания и др. привели к формированию приблизительно в начале 2000-х годов нового поколения высокоэффективных малогабаритных и малозаметных средств дистанционной разведки - мобильных мини-роботов [3].
Мобильные мини-роботы
ММР - относительно новый вид техники, появившийся приблизительно в начале 2000-х годов и интенсивно развивающийся в последнее десятилетие. Приставка «мини» свидетельствует о небольших размерах таких роботов и призвана отделить их от более крупных представителей - мобильных роботов (МР) сверхлегкого класса [4; 5].
Наиболее известными примерами ММР являются роботы PackBot и SUGV (iRobot, США), Dragon Runner (QinetiQ, США), Eye Drive (ODF, Израиль), Armadillo (MacroUSA, США). В России работы в этом направлении ведутся в ЦНИИ РТК [6], МГТУ им. Н. Э. Баумана [7; 8; 9], МГТУ МИРЭА [2; 10], ФСБ РФ [11].
Опыт применения ММР в Ираке и Афганистане доказал их эффективность при выполнении многих задач. О масштабности использования ММР можно судить по диаграмме (рис. 1), составленной по информации из различных источников. Здесь можно видеть, например, характер роста численности роботов PackBot всех модификаций (кривая 1) от единичных экземпляров в начале 2000-х годов до 500…800 штук в 2006–2007 годах и более 4500 в 2014 году [12]. В эту численность включены и военные, и гражданские модификации PackBot. Кривая 2 показывает общую численность состоящих на вооружении в США роботов двух модификаций: MTRS (Man-Transportable Robotic System) MK1 Mod 0 (на базе МР “Talon”) и MK2 Mod 0 (на базе МР “PackBot EOD”), кривая 3 – рост полной численности наземных МР различных типов, применявшихся и применяемых в Ираке и Афганистане с одного десятка единиц в 2003 году до уже двух тысяч в 2005-м и восьми тысяч [13] в 2011 году.
Основное назначение ММР: оперативный сбор данных о противнике в ходе боевых операций [10]. Задачи, которые ставятся перед ММР, можно разделить на основные (следующие из назначения) и дополнительные.
Основными задачами ММР являются:
-
- разведка, т.е. повышение ситуационной осведомленности передовых групп об обстановке внутри потенциально опасных объектов (помещений, убежищ, подвалов, салонов и днищ автомобилей и т.п.) [10; 14; 15];
-
- скрытное наблюдение за внешней обстановкой с записью или передачей в реальном времени информации на пост управления [9; 11; 16].
Дополнительные задачи, которые могут решаться с применением ММР:
-
- доставка небольших грузов (3-5 кг) и спец-средств [9; 15; 16];
-
- охрана объектов с автоматическим распознаванием нарушителей и выдачей сигнала тревоги оператору [16; 17];
-
- уточнение картографической информации, планов помещений [10];
-
- обследование и обезвреживание взрывных устройств [16; 17];
-
- ретрансляция связи [10];
-
- отвлечение внимания противника [16];
-
- прокладка маршрутов прохода через минные заграждения [10; 15];
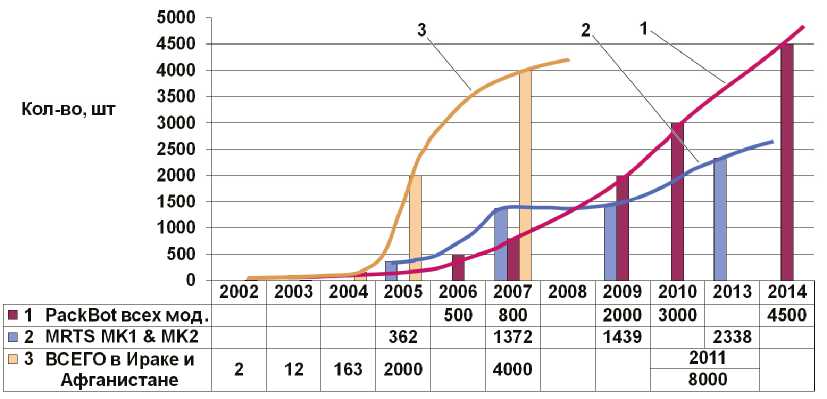
Рис. 1. Рост численности малоразмерных робототехнических систем в США

■_■ ИССЛЕДОВАНИЯ
Havko-
ЖГРАДА

Рис. 2. Примеры МТП (ЦНИИ РТК): а – шестиколёсная МТП с жёсткой рамой робота РТК-04; б – шестиколёсная МТП с ломающейся рамой
а

б
-
- выявление огневых позиций противника, целеуказание [10; 8; 16].
Одной из основных проблем, возникающих при создании ММР, является разработка малогабаритной транспортной платформы (МТП), обеспечивающей функционирование робота в недетерминированной среде и преодоление препятствий соизмеримых или больших собственных размеров.
В ЦНИИ РТК создан ряд малогабаритных мобильных роботов, предназначенных для обеспечения операций, связанных с противодействием террористическим актам. Рассмотрим схемы построения МТП этих роботов с точки зрения применимости для ММР.
Шестиколёсная МТП с жёсткой рамой
На рис. 2, а представлен малогабаритный мобильный робот РТК-04. МТП этого робота, выполненная по схеме 6К2Г * , включает шестиколёсный движитель с групповым приводом и жёсткую раму (корпус). Размеры МР: 830 (505 без манипулятора) x 408 x 120 мм.
Робот создан в конце 1990-х годов и предназначен для сопровождения более крупных МР при проведении спецопераций. Подобные МР необходимы для обследования мест, не доступных крупным роботам [9; 16]. В их оснащение обычно входят телекамера, лёгкий манипулятор или разрушитель взрывных устройств (ВУ). Специфика назначения робота обусловила схему его МТП, которая применяется в основном для передвижения по ровным поверхностям.
Максимальную высоту преодолеваемого препятствия для такой МТП можно охарактеризовать коэффициентом порогового препят- ствия КПП < 0,5, где КПП - отношение высоты преодолеваемого порогового препятствия к габаритной высоте ходовой части. Для колёсного движителя – это диаметр колеса.
В то же время анализ предполагаемой среды функционирования ММР позволяет выделить следующие характерные для городских условий препятствия:
-
- заниженные бордюры высотой 50.. .100 мм (располагаются в районе пешеходных переходов, подъездных дорог);
-
- обычные бордюры высотой 150^200 мм (наиболее часто встречаются, отделяют пешеходные тротуары от проезжей части);
-
- высокие бордюры высотой 300^350 мм (в основном это разделительные полосы,
разграничивающие проезжие части противоположных направлений).
Отсюда видно, что применение рассматриваемого варианта МТП в качестве основы ММР нецелесообразно ввиду явно ограниченных возможностей по передвижению в предполагаемых условиях.
Шестиколёсная МТП с ломающейся рамой
Для увеличения проходимости применяют схемы с возможностью пассивной или активной адаптации к поверхности сложного рельефа [11; 16; 18]. Наиболее простой вариант - выполнение корпуса по типу ломающейся рамы с пассивным шарниром сочленения. Так построены, например, МТП гусеничного мини-робота SandDragon, имеющего двухсекционную схему с одностепенным шарниром сочленения (схема 2С1Пх2Г), и МТП, показанная на рис. 2, б .
Эта МТП имеет шестиколёсный движитель с индивидуальными приводами колёс и ломающуюся раму (корпус) с тремя степенями подвижности (схема 6К3П). Размеры МТП: 540 х 420 х 170 мм.
Испытания показали возможность преодоления препятствий с КПП ≤ 1,0 (при некоторых условиях до 1,5). К недостаткам такой схемы можно отнести сложность размещения полезной нагрузки и невозможность передвижения по лестницам.
К тому же функционирование ММР в априори неизвестной среде сопряжено с большой вероятностью его опрокидывания. Возврат же в нормальное положение подобной МТП затруднителен. В ряде мини-роботов эта проблема решается путём их симметричного исполнения (нет разницы между верхней и нижней частями) и возможностью передвижения как на одной, так и на другой стороне, с одновременным переворотом на 180 градусов изображения с телекамер [9]. Однако такой подход делает невозможным установку на робот полезной нагрузки, габариты которой выступают за габариты движителя.
Поэтому представляется, что применение подобной схемы МТП оправдано для создания относительно простой и недорогой РТС для обеспечения оперативных наблюдательных и разведывательных задач на относительно небольшом удалении от оператора.
Гусеничные МТП изменяемой геометрии
Необходимость передвижения МТП внутри помещений, в том числе по лестницам, приводит к применению схем с активной адаптацией. Характерным примером такого решения является МТП робота PackBot [6; 12], построенная по четырехгусеничной схеме 4Г1А. МТП имеет две основные гусеницы и две дополнительные, установленные на поворотных рычагах. Это по- зволяет при сохранении небольших размеров в транспортном положении существенно увеличивать длину опорной поверхности, обеспечивая уверенное движение по лестнице подобно движению по наклонной плоскости.
Размеры этой МТП: 686 х 508 х 180 мм, максимальная габаритная длина с вытянутыми рычагами 879 мм, максимальная длина опорной поверхности гусениц 760 мм. Такая конструкция обеспечивает преодоление пороговых препятствий с КПП ≤ 1,5, движение по лестницам, возможность возврата в рабочее положение после опрокидывания. К недостаткам можно отнести более низкий КПД гусеничного движителя по сравнению с колёсным, существенную вероятность заклинивания малогабаритного гусеничного движителя из-за попадания между его частями фрагментов деформируемого грунта. В то же время можно заметить, что высокие параметры проходимости в подобной схеме сохраняются при относительно больших (до 0,7 м) габаритных размерах.
Шестигусеничная МТП изменяемой геометрии
В результате исследования возможностей по созданию более компактной МТП была предложена схема, представленная на рис. 3. Выбор именно такого варианта является результатом сравнительного анализа большого числа схем шасси [18] по критерию обеспечения наиболее эффективного способа преодоления лестничных маршей и высоких (не менее 200 мм) пороговых препятствий.
МТП построена по шестигусеничной схеме 6Г2А, имеет две основные и четыре дополнительные гусеницы, установленные
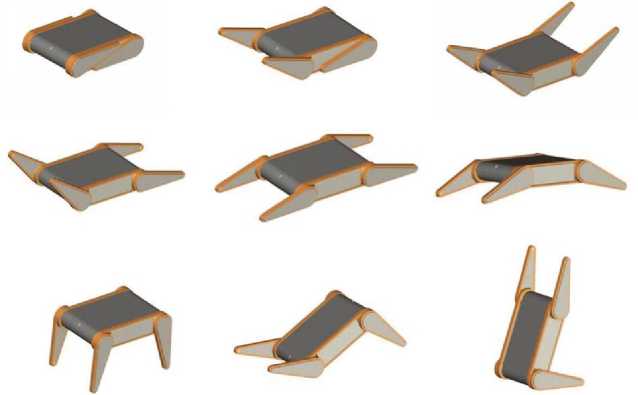
Рис. 3. Шестигусеничная МТП изменяемой геометрии. Возможные конфигурации
ИССЛЕДОВАНИЯ
Havko____________
Ж ГРАДА попарно на передних и задних поворотных рычагах. Размеры МТП: 390 х 312 х 87 мм, максимальная габаритная длина с вытянутыми рычагами 738 мм, максимальная длина опорной поверхности гусениц 706 мм. Относительная высота преодолеваемого порогового препятствия составляет КПП ≤ 3,0. Испытания экспериментальных образцов подтвердили правильность принятых схемных и конструктивных решений, обеспечение наименее энергозатратного способа преодоления
-
24 лестничных маршей, сравнимых с PackBot в абсолютном выражении препятствий при существенно меньших габаритных размерах [6]. Высота преодолеваемого порогового препятствия составила 250…270 мм, ширина преодолеваемой канавы до 410 мм.
Разработанная МТП позволяет создавать ММР, обладающие следующими достоинствами:
-
- компактные размеры и небольшую массу;
-
- высокая проходимость;
-
- изменение угла зрения телекамер за счёт наклона корпуса ММР;
-
- увеличение высоты визирования телекамер и/или дорожного просвета (клиренса) за счёт подъёма корпуса ММР одновременно на передних и задних рычагах с сохранением его горизонтального положения;
-
- транспортировка полезной нагрузки и сброс её путём наклона корпуса ММР;
-
- возможность использования одного из рычагов с закреплённой на нём телекамерой для её ориентации;
-
- возвращение ММР с помощью рычагов в штатное положение после опрокидывания.
Универсальная реконфигурируемая МТП
Дальнейшим развитием описанной схемы стало создание на её основе МТП с возможностью быстрой перенастройки без применения специального инструмента с одного типа движителя на другой, как показано на рис. 4. Это обеспечивает адаптируемость шасси к конкретной оперативной обстановке и характеру местности.
В созданной конструкции перенастройка не превышает двух – пяти минут. При этом обеспечивается функционирование МТП в трёх возможных конфигурациях: шестигусеничной 6Г2А, колёсной 4К2Г и колёснорычажной 4КР2ГА. Переход на колёсный вариант целесообразен, когда по условиям проводимых работ не требуется преодоление значительных препятствий (с КПП выше 0,5). Эта конфигурация обеспечивает повышение общего КПД ходовой части, максимальной скорости движения и надёжности функционирования на слабонесущих грунтах за счёт снижения вероятности попадания фрагментов грунта или мелких камней между подвижными частями движителя. Колёсно-рычажный вариант, получаемый установкой рычагов без дополнительных гусениц, обеспечивает возможность преодоления пороговых препятствий с КПП до 2,1. Использование конфигурации 6Г2А целесообразно при необходимости преодоления значительных препятствий и для движения по лестницам.
Итак, проведённые работы позволили создать универсальную многофункциональную транспортную платформу для мини-роботов, функционирующих на урбанизированной территории и способных передвигаться как внутри, так и снаружи зданий, с преодолением препятствий, превосходящих собственные размеры. Созданные образцы мини-роботов с оперативно реконфигурируемыми шасси доказали свою эффективность и правомерность принятых концептуальных и технических решений. Дальнейшие работы связаны с повышением технико-эксплуатационных показателей ММР, включая совершенствование алгоритмов автономного преодоления препятствий.
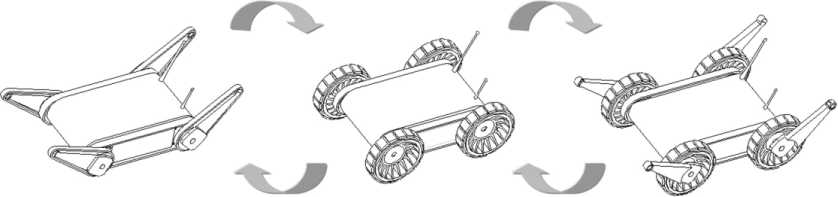
Рис. 4. Схема реконфигурируемой МТП (6Г2А – 4К2Г – 4КР2ГА)
Список литературы Исследование путей создания универсальной малогабаритной транспортной платформы для мобильных мини-роботов
- Иванов А. В., Юревич Е. И. Мини- и микроробототехника. СПб.: Изд-во Политехн. ун-та, 2011. 96 с.
- Перспективы и реалии применения интеллектуальных технологий управления и обработки информации при создании образцов ВВТ нового поколения / И. И. Макаров, В. М. Лохин, С. В. Манько, М. П. Романов; МИРЭА // Перспективные системы и задачи управления: материалы Третьей Всеросс. науч.-практ. конф. Таганрог: Изд-во ТТИ ЮФУ, 2008. Т. 1. С. 15-18.
- Васильев А. В. Мобильные мини-роботы разведки: текущее состояние, характерные черты и общие тенденции развития // Известия ЮФУ. Технические науки: Тематический выпуск «Перспективные системы и задачи управления». Таганрог: Изд-во ТТИ ЮФУ, 2010. № 3 (104). С. 119-124.
- Васильев А. В. Обобщённая классификация мобильных роботов // Экстремальная робототехника: труды Междунар. науч.-техн. конф. (1-2 октября 2014 г., Санкт-Петербург). СПб.: Политехника-сервис, 2014. С. 41-46. ISBN: 978-5-906555-74-8
- Васильев А. В, Лопота А. В. Уточнение типоразмерных групп наземных дистанционно управляемых машин для применения в опасных для человека условиях // Научно-технические ведомости СПбГПУ. 2015. № 1 (214). С. 226-234.
- Васильев А. В., Полин А. В. Мобильный робот-разведчик на базе шестигусеничного движителя с изменяемой геометрией // Перспективные системы и задачи управления: материалы Третьей Всеросс. науч.-практ. конф. Таганрог: Изд-во ТТИ ЮФУ, 2008. Т. 1. С. 133-139.
- Рубцов И. В. Вопросы состояния и перспективы развития отечественной наземной робототехники военного и специального назначения // Известия ЮФУ. Технические науки: Тематический выпуск «Перспективные системы и задачи управления». Таганрог: Изд-во ТТИ ЮФУ, 2013. № 3 (140). С. 14-21.
- Машков К. Ю., Наумов В. Н., Рубцов И. В. Боевые мини-роботы и обеспечение их подвижности на поле боя // Перспективные системы и задачи управления: материалы Третьей Всеросс. науч.-практ. конф. Таганрог: Изд-во ТТИ ЮФУ, 2008. Т. 1. С. 145-147.
- Шайденко И. В. Двухкомпонентная мобильная робототехническая система для наблюдения и разведки // Экстремальная робототехника: сб. докл. междунар. науч.-техн. конф. (23-25 ноября 2011 г., Санкт-Петербург). СПб.: Политехника-сервис, 2011. С. 342-346.
- Лохин В. М., Манько С. В., Хованов Д. Г. Разработка требований к робототехническим комплексам военного назначения, применяемым при ведении боевых действий в городских условиях // Перспективные системы и задачи управления: материалы Седьмой Всеросс. науч.-практ. конф. Таганрог: Изд-во ТТИ ЮФУ, 2012. С. 6-11.
- Космачёв П. В. Анализ конструктивных схем движителей транспортных средств робототехнических комплексов для выполнения антитеррористических операций // Актуальные проблемы защиты и безопасности: труды IX Всеросс. науч.-практ. конф. СПб.: НПО Специальных материалов, 2006. Т. 5: Экстремальная робототехника. С. 607-615.
- iRobot 510 PackBot [Электронный ресурс] // IROBOT.COM. - URL: http://www.irobot.com/ For-Defense-and-Security/Robots/510-PackBot.aspx#PublicSafety (дата обращения 15.03.2015).
- Unmanned Systems Integrated Roadmap FY2011-2036 [Электронный ресурс]. - [USA], 2011. - 108 p. - URL:http://www.fas.org/irp/program/collect/usroadmap2011.pdf (дата обращения 06.05.2014).
- Бой в городе. Боевые и обеспечивающие роботы в условиях урбанизированной территории / В. С. Лапшов, В. П. Носков, И. В. Рубцов, Н. А. Рудианов, А. В. Рябов, В. С. Хрущев // Известия ЮФУ. Технические науки: Тематический выпуск «Перспективные системы и задачи управления». 2011. № 3 (116). С. 142-146.
- Комплексный подход к обоснованию номенклатуры и облика разведывательных роботов для боя на урбанизированной территории / И. Б. Шеремет [и др.] // Экстремальная робототехника: сб. докл. Всеросс. науч.- техн. конф. (25-26 сентября 2012 г., Санкт-Петербург). СПб.: Политехника-сервис, 2012. С. 438-440.
- Батанов А. Ф., Грицынин С. П., Муркин С. В. Робототехнические комплексы для обеспечения специальных операций // Специальная техника. 1999. № 6. С. 10-17.
- Dragon Runner 20. Small Unmanned Ground Vehicle [Электронный ресурс] / QinetiQ NA// QINETIQ. COM: сайт концерна QinetiQ. - Системные требования: Adobe Acrobat Reader. - URL: https://www.qinetiq-na.com/wp-content/uploads/data-sheet_dr-20.pdf (дата обращения: 06.05.2014).
- Васильев А. В. Исследование и классификация структурно-кинематических схем шасси мобильных роботов // Перспективные системы и задачи управления: материалы IX Всеросс. науч.-практ. конф. Таганрог: Изд-во ЮФУ, 2014. С. 115-128.
