Исследование работоспособности и эффективности алгоритма подавления автоколебаний при интенсивном начале движения на подъёме

Бесплатный доступ
Актуальность. Одним из возможных режимов эксплуатации, при котором автоколебания валов и передач тягового электропривода проявляются наиболее ярко, является режим фиксации транспортного средства на уклоне при начале его скатывания за счёт создания крутящего момента на валах электродвигателей, препятствующих вращению колёс в сторону скатывания транспортного средства. При этом штатная тормозная система задействована и ведущие колеса находятся в тормозном режиме, поскольку активирована функция помощи на подъёме. В данном случае возможна несогласованность процессов снижения тормозного момента и нарастания тягового момента при старте, что может привести к накоплению в системе энергии, возбуждающей автоколебания при отрицательном трении и отсутствии или малости демпфирования. Данный рабочий режим в эксплуатации является высоковероятным, поскольку движение транспортного средства сопряжено всегда с остановками и последующим началом движения, в особенности в условиях населённых пунктов, что нередко бывает на уклонах дороги. Цель исследования. Необходимо проверить работоспособность и эффективность метода подавления автоколебаний в электромеханической системе привода колеса при начале движения и работе системы помощи на подъёме.
Автоколебания, интенсивное начало движения на уклоне, удержание на уклоне, демпфирование, импульсное подавление колебаний, скольжение, испытания
Короткий адрес: https://sciup.org/147247586
IDR: 147247586 | УДК: 629.015 | DOI: 10.14529/engin240410
Investigation of the efficiency and effectiveness of the algorithm for suppressing self-oscillations at the intensive start of movement on the rise
One of the possible operating modes in which the self-oscillation of the shafts and gears of the traction electric drive are most pronounced is the mode of fixing the vehicle on a slope at the beginning of its rolling due to the creation of torque on the shafts of electric motors that prevent the wheels from rotating towards the rolling of the vehicle. At the same time, the standard braking system is activated, and the driving wheels are in braking mode, since the lifting assistance function is activated. In this case, there may be inconsistency in the processes of reducing the braking torque and increasing the traction torque at start, which can lead to the accumulation of energy in the system exciting self-oscillations with negative friction and the absence or smallness of damping. This operating mode in operation is highly probable, since the movement of the vehicle is always associated with stops and the subsequent start of movement, especially in populated areas, which often happens on road slopes. The purpose of the study. It is necessary to check the operability and effectiveness of the self-oscillation suppression method in the electromechanical wheel drive system at the beginning of movement and the operation of the lifting assistance system.
Текст научной статьи Исследование работоспособности и эффективности алгоритма подавления автоколебаний при интенсивном начале движения на подъёме
При взаимодействии 2 тел при определённых условиях могут возбуждаться колебания, сопровождаемые отрицательным демпфированием или без оного. Такие процессы называются автоколебательными или релаксационными колебаниями [1, 2]. При взаимодействии эластичной пневматической шины могут иметь место автоколебания, обусловленные трением. Возбуждение данного процесса может оказать влияние на безопасность движения машины [3–6] и может являться диагностическим признаком для выработки управляющего воздействия для корректировки на параметры рабочих процессов [7–13].
Для рудничного электротранспорта в работе [14] возникновение автоколебаний, регистрируемых по датчикам токов, потребляемых тяговым приводом, является диагностическим признаком появления буксования, что используется в дальнейшем для борьбы с буксованием. Аналогичная задача исследована для железнодорожного транспорта в работах [15–22] при обеспечении движения при реализации максимально возможного сцепления возникновения автоколебаний в зоне взаимодействия колеса с рельсом.
В трансмиссиях автомобилей, рабочие процессы которых характеризуются действием сил трения, возможны условия для возбуждения релаксационных колебаний. В работе [23] рассматриваются автоколебательные явления в механических передачах при начале движения, а в работе
-
[24] - при переключении передач в коробках передач со сближенными передаточными числами. Из-за изменения коэффициента трения при изменении скорости скольжения в процессе включения и выключения фрикционных сцеплений могут возникать толчки и вибрации («рывки» сцепления) [25, 26]. Автоколебания могут также привести к галопированию, рысканию транспортного средства [27].
Особый интерес представляют колебательные процессы в электромеханических приводах, применяемых для привода ведущих колёс аккумуляторных транспортных средств (электромобилей и электробусов), поскольку некоторым типам электрических машин в силу их конструкций при определённых условиях свойственна склонность к возбуждению автоколебаний [27, 28]. Поэтому они могут возникать в ситуациях, когда в механическом приводе их бы не было, что приводит к негативным явлениям, снижающим технические показатели, приводящим к увеличению потерь, повышению динамических нагрузок и даже поломок кинематических звеньев [29], в том числе вследствие потери устойчивости электропривода в составе электромеханической системы [30, 31]. Однако свойство электропривода прямого управления моментом позволяет методами управления исключать ситуации возникновения автоколебаний, тогда как в чисто механическом приводе они будут возбуждаться.
Поэтому исследование автоколебательных явлений для электромеханического привода транспортных средств и синтез законов управления приводом является актуальной задачей.
Постановка проблемы
Одним из возможных режимов эксплуатации, при котором автоколебания валов и передач тягового электропривода проявляются наиболее ярко, является режим фиксации транспортного средства на уклоне при начале его скатывания за счёт создания крутящего момента на валах электродвигателей, препятствующих вращению колёс в сторону скатывания транспортного средства. При этом штатная тормозная система задействована и ведущие колеса находятся в тормозном режиме, поскольку активирована функция помощи на подъёме. В данном случае возможна несогласованность процессов снижения тормозного момента и нарастания тягового момента при старте, что может привести к накоплению в системе энергии, возбуждающей автоколебания при отрицательном трении и отсутствии или малости демпфирования
Поэтому необходимо проверить методами экспериментальных исследований работоспособности и эффективности функционирования закона управления приводом, позволяющего подавлять возбуждаемые автоколебательные явления при начале движения и работе системы помощи на подъёме.
Средняя вероятность начала движения на уклоне достигает в среднем до 43 %, что показано на рис. 1.
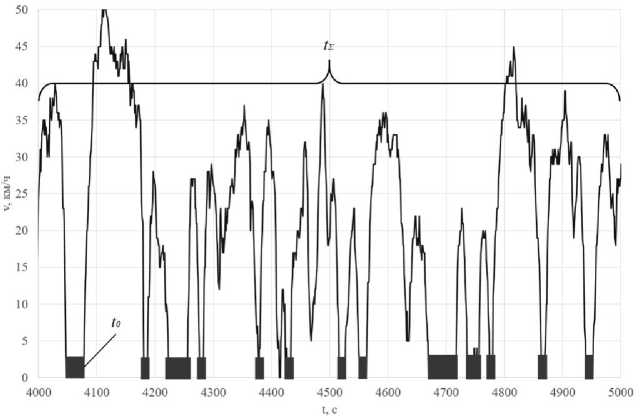
Рис. 1. Соотношение общего времени движения ко времени стоянок (участок движения на маршруте – пример): – время стоянок
Fig. 1. The ratio of the total travel time to the parking time (a section of traffic on the route is an example): – parking time
Наиболее вероятные значения подъёмов и спусков находятся в диапазоне 0…3 % с вероятностью более 99 %. Большие значения уклонов не превышают по вероятности 1 %.
Усреднённый эквивалентный профиль дороги на маршруте показан на рис. 2.
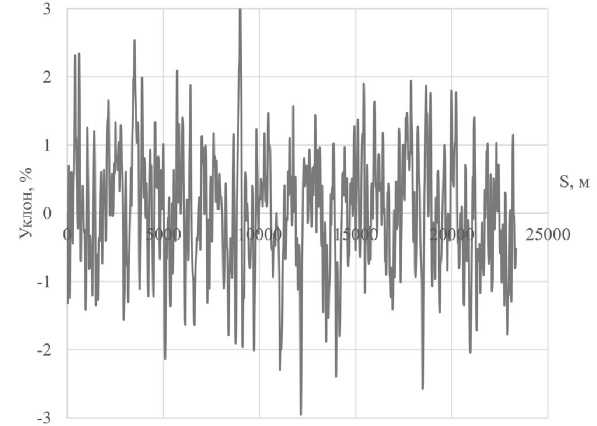
Рис. 2. Эквивалентный профиль дороги Fig. 2. Equivalent road profile
Данный рабочий режим в эксплуатации является высоковероятным, поскольку движение транспортного средства сопряжено всегда с остановками и последующим началом движения, в особенности в условиях населённых пунктов, что нередко бывает на уклонах дороги. Поэтому важно исследовать работоспособность и эффективность функционирования алгоритма подавления автоколебаний в процессе начала движения на небольших уклонах 2 %.
Как показывает анализ, проведённый в [32, 33], автоколебания в зоне взаимодействия эластичного колеса с опорным основанием при торможении возбуждаются в конечной фазе процесса замедления и могут иметь значительную интенсивность, что негативно сказывается на качестве фиксации транспортного средства при скатывании с уклона и приводит к увеличению нагру-женности элементов привода.
Алгоритм [34] работает следующим образом.
При обнаружении повышенного скольжения по диагностическим признакам скольжения колёс dw2 и dw4 [35, 36] происходит определение управляющих сигналов u 2 и u 4 , снижающих крутящие моменты. В случае поворота рулевого колеса рассчитываются коэффициенты коррекции k 2 и k 4 , учитывающие криволинейность движения для колёс левого и правого борта, перераспределяющие крутящие моменты между колёсами. Тем самым система при регистрации повышенного скольжения, вплоть до полного скольжения, при снижении силы трения в пятне контакта, при росте скорости [32, 33] детектирует по сигналам от датчиков колёсных скоростей, датчиков углового положения и частоты вращения вала электродвигателя, датчиков тока, положения органов управления ситуацию, провоцирующую возбуждение автоколебаний, и реализует последующее управляющее воздействие. Как указано в [32, 33], данные процессы распространяются на остальные элементы электромеханической силовой передачи.
Для этого рассчитывают приведённую угловую жёсткость электромеханического привода вместе с колесом в процессе управления как отношение приращения, реализуемого приводом ΔMti Л момента и ускорения/замедления колеса С mi = (где Δ – изменение/приращение крутяще-
Δ co кt , го момента, ΔШк; – изменение угловой скорости колеса) и для активного подавления автоколебаний коэффициент демпфирования должен быть Kw≥2yf]кСm . После этого вычисляется демпфирующий крутящий момент M^, прямо пропорциональный угловой скорости колёс ^d =-Kw0)к frelay , который при назначении реализуемого крутящего момента вычитается из запрашиваемой водителем уставки, обеспечивая тем самым затухание колебаний, с учётом релейной функции frelay , исключающей возбуждение автоколебаний в системе управления.
При этом обеспечивается изъятие провоцирующей автоколебания энергии и их подавление.
Для активного подавления автоколебаний коэффициент демпфирования должен быть Kw ≥ ^^^fкСm [37], где Jк – момент инерции колеса и механического привода, а угловую жёсткость Сmi для системы привода колеса можно оценить в процессе управления как отношение приращения реализуемого приводом момента и ускорения/замедления колеса.
Обратная связь обеспечивается посредством также анализа скольжения колеса, при его отсутствии или малости автоколебания считаются подавленными.
Методология исследования
Исследование работоспособности и эффективности данного алгоритма проведено методом экспериментальных исследований.
Программа экспериментальных исследований и оборудование, применяемое при испытаниях
Поскольку автоколебания повышают динамическую нагруженность элементов привода, с целью исключения их повреждения исследования проводились для случая трогания транспортного средства [38] на сухом асфальте с уклоном дороги 3% (рис. 3). При испытании транспортное средство в момент начала движения стремилось откатиться назад, и при нарастании тягового крутящего момента в процессе начала движения вперёд происходило провоцирование ситуации повышенного скольжения колеса, сопровождаемое снижением силы трения в процессе изменения направления его движения. В начале отката сила трения в пятне контакта направлена назад и постепенно по мере начала движения снижается и изменяется по направлению.
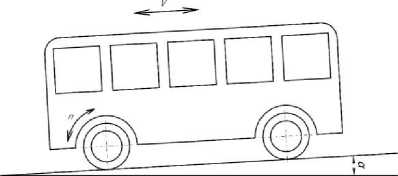
Рис. 3. Схема испытаний при трогании транспортного средства на уклоне Fig. 3. Test scheme when starting a vehicle on an incline
В процессе испытаний на неподвижно стоящем на уклоне транспортном средстве водитель отпускал педаль тормоза при активированной функции предотвращения отката средствами тягового электропривода. При появлении отрицательных значений угловой скорости колёс система предотвращения отката создаёт тяговые моменты на ведущих колёсах, необходимые для неподвижного удержания электробуса. Цикл удерживания на уклоне повторялся несколько раз.
Материалы и методы
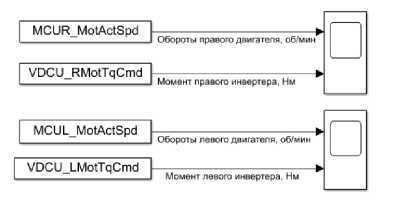
Транспортное средство для фиксации значений параметров рабочих процессов тягового электромеханического привода колеса в процессе экспериментальных исследований оснащено датчиками частоты вращения ротора электродвигателя, фазных токов, по значениям которых определяется электромагнитный крутящий момент, сопротивление вращению колеса определяется с помощью наблюдателя момента сопротивления, посредством датчиков угловых скоростей колёс регистрируются их угловые скорости. Все значения параметров посылаются управляющим контроллером в CAN-шину и в процессе экспериментальных исследований фиксируются адаптером Vector VN1630А (рис. 4) на ЭВМ. Для анализа данных использовалось программное обеспечение Vector CANoe (рис. 5, а) и MATLAB Simulink (рис. 5, b). Анализировался характер реализации регистрируемых параметров, величины амплитуд колебательных явлений, степень их снижения при сопоставлении парных пиков реализаций, приведённых в [36–38].
Силовые и кинематические параметры на ведущих колёсах измеряются с помощью тензометрических колёс Kistler RoaDyn и регистрируются системой сбора данных IMC-CRFX-400 (рис. 6), которыми в процессе испытаний дополнительно был оснащён электробус. Данное оборудование использовалось в качестве резервного источника информации, с помощью которой осуществлялась проверка работоспособности и функциональности алгоритма подавления автоколебаний. В эксплуатации алгоритм не требует установки дополнительных датчиков и функционирует посредством обработки информации от штатных систем транспортного средства, транслируемой по CAN-шине: тормозной системы и системы тягового электрического привода, а именно датчиков колёсных скоростей, частоты вращения вала электродвигателя, датчиков тока электродвигателя, датчиков положения органов управления и определяемых параметров рабочих процессов с помощью программных наблюдателей состояний систем.

а)
b)
Рис. 4. Адаптер Vector VN1630А и ЭВМ
Fig. 4. Vector VN1630A and Computer Adapter
а)
b)
Рис. 5. Окно программ для анализа данных: а) Vector CANoe; b) MATLAB Simulink
Fig. 5. The window of programs for data analysis: a) Vector CANoe; b) MATLAB Simulink

а)

Рис. 6. Тензометрические измерительные колёса Kistler RoaDyn и система сбора данных IMC-CRFX-400
Fig. 6. Kistler Roading Strain Gauge Wheels and IMC-CRFX-400 Data Acquisition System
Результаты экспериментальных исследований
На первом этапе алгоритм подавления автоколебаний был деактивирован. На рис. 7–12 представлены результаты измерения крутящих моментов тяговых электродвигателей и угловые скорости их роторов для 3 эпизодов трогания транспортного средства и работы системы помощи на подъёме. Перед началом испытаний электробус фиксировался на подъёме 3 % (как наиболее ве- роятном в эксплуатации), активируется система помощи на подъёме кнопкой на приборной панели. Далее водитель осуществляет старт при нажатии на педаль хода. При этом система управления машиной не имеет алгоритма подавления автоколебаний в своём составе.
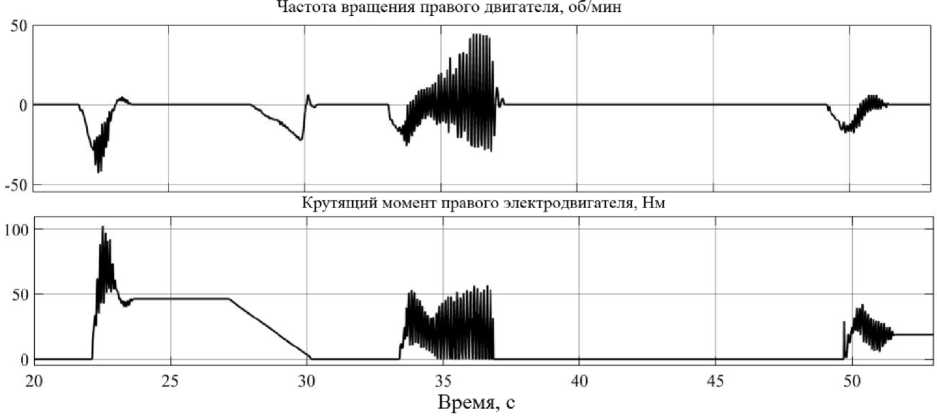
Рис. 7. Частота вращения и крутящий момент правого электродвигателя (эпизод 1)
Fig. 7. Angular velocity of rotation and torque of the right electric motor (Episode 1)
Частота вращения левого электродвигателя, об/мин
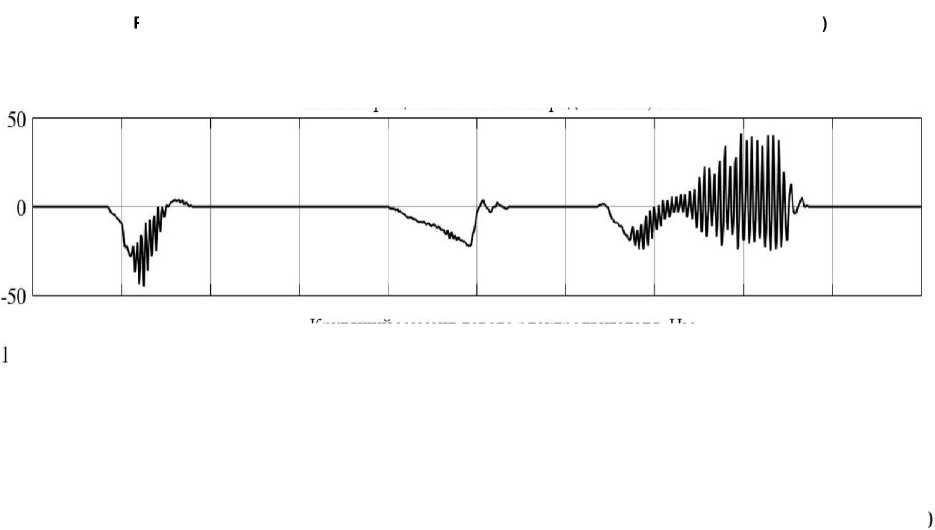
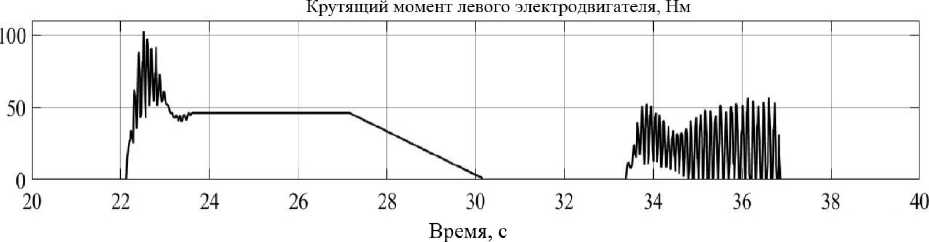
Рис. 8. Частота вращения и крутящий момент правого электродвигателя (эпизод 1)
Fig. 8. Angular velocity of rotation and torque of the left electric motor (Episode 1)
На графиках рис. 7–12 отчётливо видны участки возбуждения автоколебаний как угловых скоростей роторов ТЭД, так и их крутящих моментов при затормаживании колёс.
На втором этапе алгоритм подавления автоколебаний был активирован. На рис. 13–18 представлены результаты измерения крутящих моментов тяговых электродвигателей и угловые скорости их роторов для 3 эпизодов трогания транспортного средства и работы системы помощи на подъёме. Процесс проведения исследовательских заездов аналогичен указанному выше, за исключением того, что система управления имеет в своём составе алгоритм подавления автоколебаний.
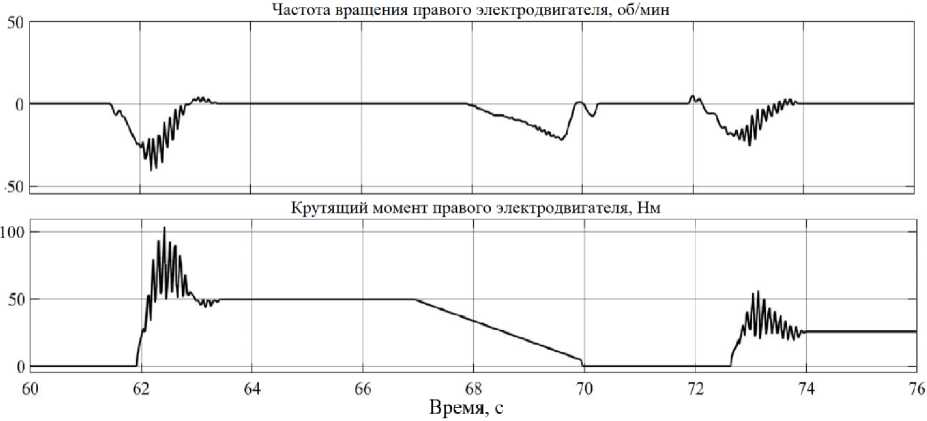
Рис. 9. Частота вращения и крутящий момент правого электродвигателя (эпизод 2)
Fig. 9. Angular velocity of rotation and torque of the right electric motor (Episode 2)
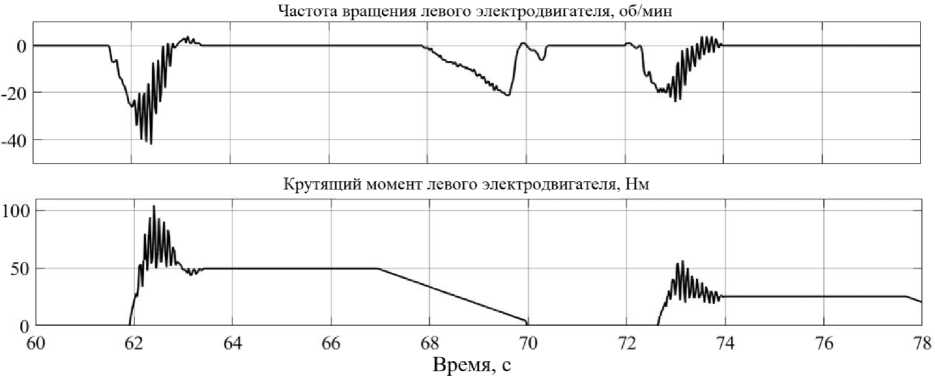
Рис. 10. Частота вращения и крутящий момент левого электродвигателя (эпизод 2)
Fig. 10. Angular velocity of rotation and torque of the left electric motor (Episode 2)
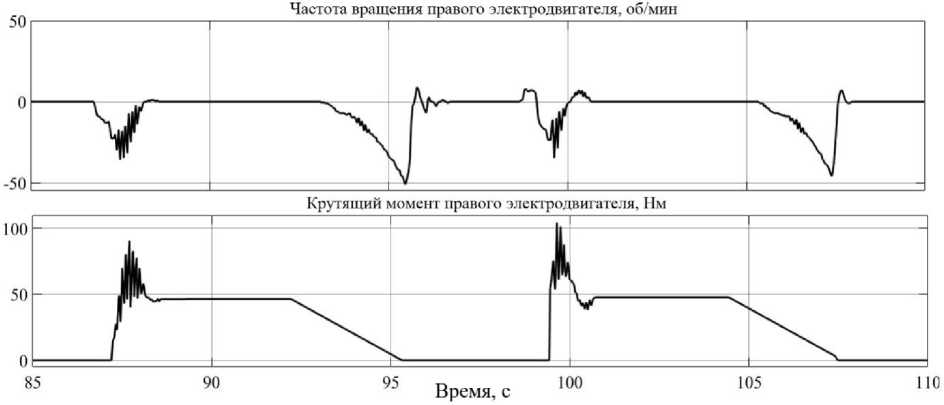
Рис. 11. Частота вращения и крутящий момент правого электродвигателя (эпизод 3)
Fig. 11. Angular velocity of rotation and torque of the right electric motor (Episode 3)
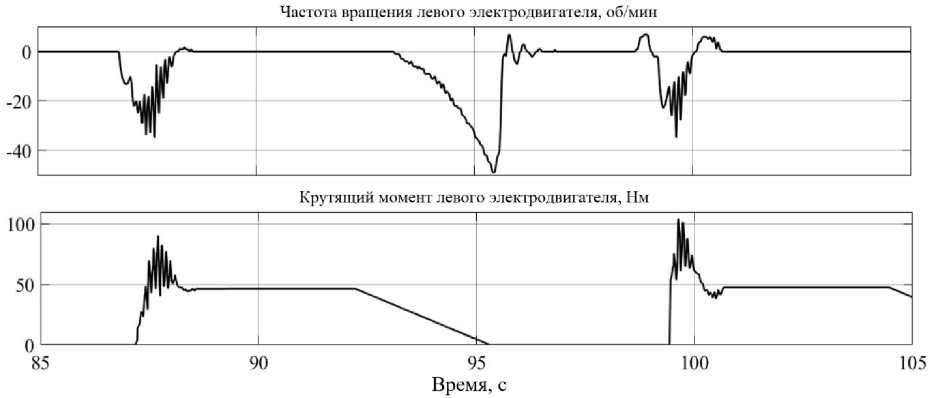
Рис. 12. Частота вращения и крутящий момент левого электродвигателя (эпизод 3)
Fig. 12. Angular velocity of rotation and torque of the left electric motor (Episode 3)
На графиках рис. 13–18 видно, что при активации алгоритма подавления автоколебаний в процессе интенсивного начала движения на уклоне амплитуды колебаний угловой скорости роторов ТЭД существенно снижены, а автоколебаний крутящих моментов вообще не наблюдалось.
Результаты и обсуждения
По результатам исследований можно заключить. что при активации алгоритма подавления автоколебаний амплитуды колебаний угловой скорости роторов ТЭД снижены до 8 раз. Для крутящих моментов автоколебания подавлены полностью, что свидетельствует об эффективности алгоритма подавления. При этом работа алгоритма подавления автоколебаний привела к повышению эффективности работы алгоритма фиксации транспортного средства на уклоне, так как откат при фиксации уменьшился на 8…15 %. Алгоритм подавления автоколебаний при испытаниях показал свою работоспособность и эффективность, и его можно рекомендовать для практической разработки систем управления замедлением транспортных средств.
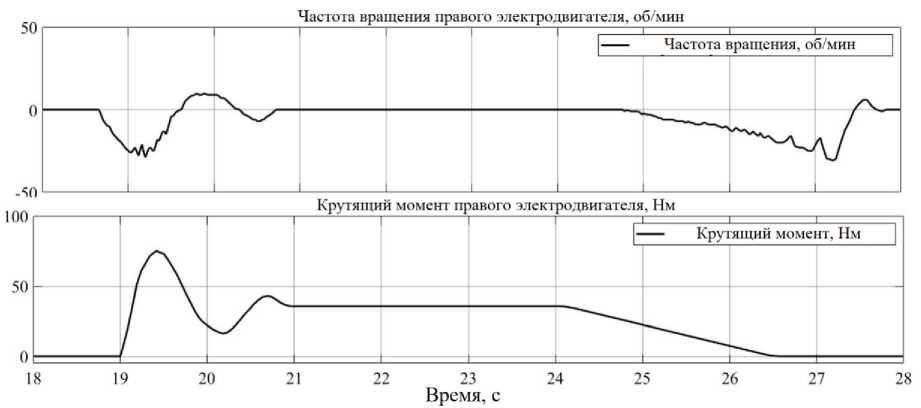
Рис. 13. Частота вращения и крутящий момент правого электродвигателя (эпизод 1)
Fig. 13. Angular velocity and torque of the right electric motor (Episode 1)
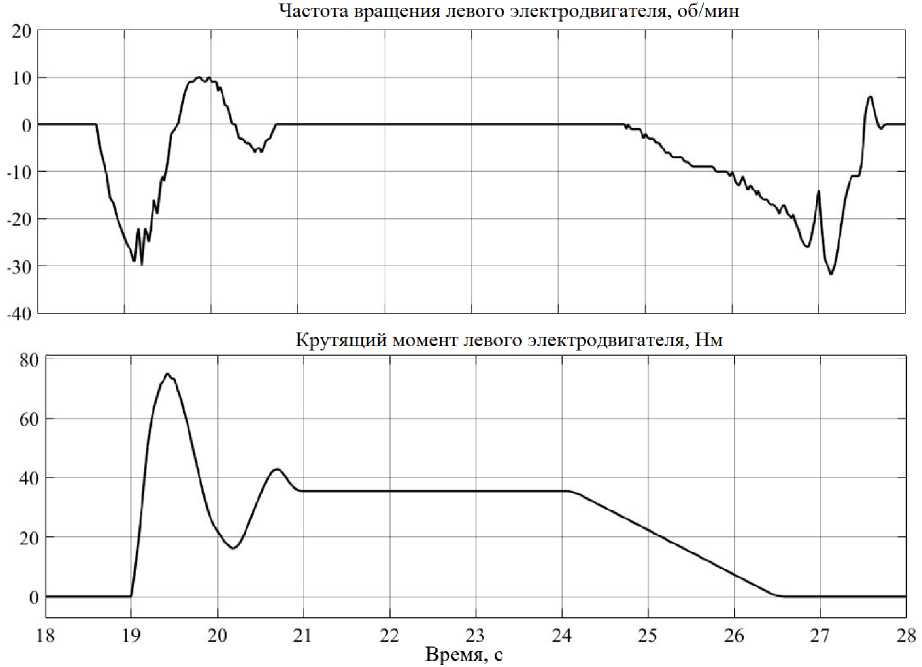
Рис. 14. Частота вращения и крутящий момент левого электродвигателя (эпизод 1)
Fig. 14. Angular velocity and torque of the left electric motor (Episode 1)
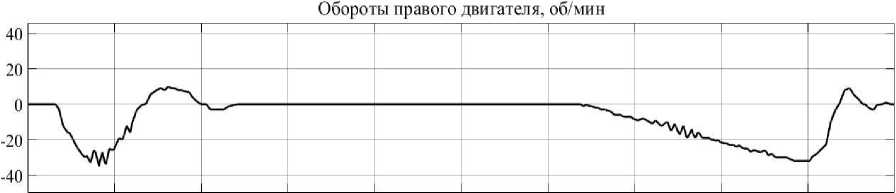
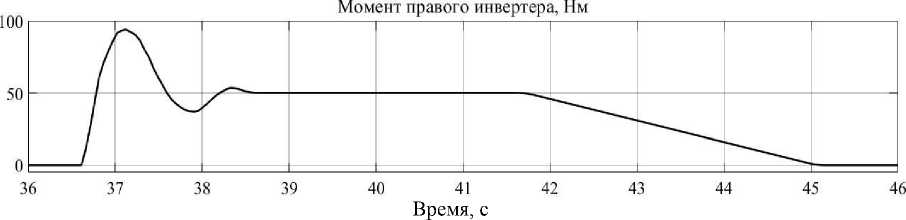
Рис. 15. Частота вращения и крутящий момент правого электродвигателя (эпизод 2)
Fig. 15. Angular velocity and torque of the right electric motor (Episode 2)
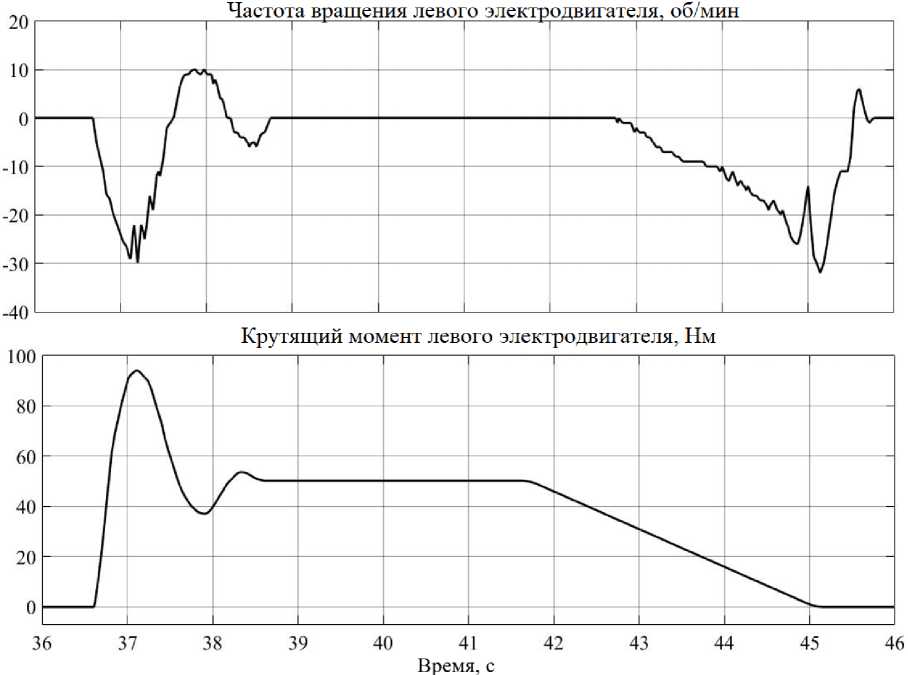
Рис. 16. Частота вращения и крутящий момент левого электродвигателя (эпизод 2)
Fig. 16. Angular velocity and torque of the left electric motor (Episode 2)
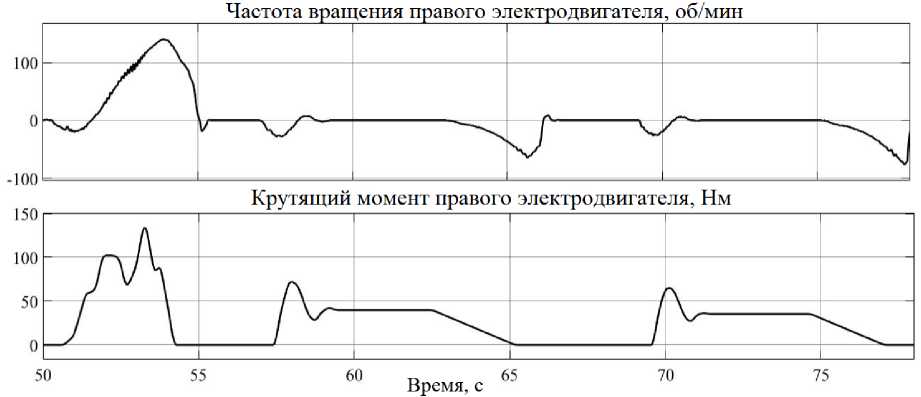
Рис. 17. Частота вращения и крутящий момент правого электродвигателя (эпизод 3)
Fig. 17. Angular velocity and torque of the right electric motor (Episode 3)
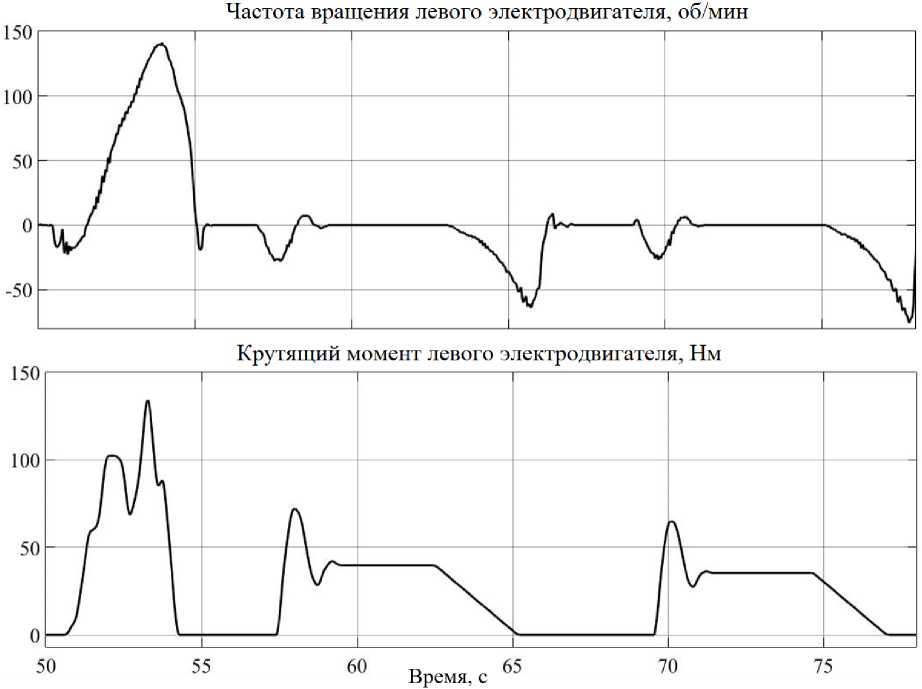
Рис. 18. Частота вращения и крутящий момент левого электродвигателя (эпизод 3)
Fig. 18. Angular velocity and torque of the left electric motor (Episode 3)
Список литературы Исследование работоспособности и эффективности алгоритма подавления автоколебаний при интенсивном начале движения на подъёме
- Вильке В.Г., Шаповалов И.Л. Автоколебания в процессе торможения автомобиля // Вестник МГУ. Сер. 1. Математика, механика. 2015. № 4. С. 33–39.
- Светлицкий В.А. Случайные колебания механических систем. М.: Машиностроение, 1976. 216 с.
- Кручинин П.А., Магомедов М.Х., Новожилов И.В. Математическая модель автомобильного колеса на антиблокировочных режимах движения. // Известия РАН, серия МТТ. 2001. № 6. С. 63–69.
- Pascal M. Dynamics and stability of a two degrees of freedom oscillator with an elastic stop // Journal of Computational and Nonlinear Dynamics. 2006. V. 1. No. 1. P. 94–102.
- Awrejcewiez J., Dzyubak L., Grehori C. Estimation of chaotic and regular (stick-slip and ship-slip) oscillations exhibited by coupled oscillations with dry friction // Nonlinear Dynamics. 2005. V. 42. No. 2. P. 383–394.
- Analysis of disk brake noise using a two-degrees-of-freedom model / K. Shin, M.J. Brennan, J.-E. Oh, C.J. Harris // Journal of Sound and Vibration. 2002. V. 254. No. 5. P. 837–848.
- Designs and development of Russian scientific schools in the field of cross-country ground vehi-cles building / G.O. Kotiev, B.V. Padalkin, A.B. Kartashov, A.S. Diakov // ARPN Journal of Engineer-ing and Applied Sciences. 2017. Vol. 12 (4). P. 1064–1071.
- Ergin A.A., Kolomejtseva M.B., Kotiev G.O. Antiblocking control system of the brake drive of automobile wheel //Pribory i Sistemy Upravleniya. 2004. No. 9. P. 11–13.
- Soliman A., Kaldas M. An Investigation of Anti-lock Braking System for Automobiles // SAE Technical. 2012. P. 2012-01-0209. https://doi.org/10.4271/2012-01-0209.
- Sun C., Pei X. Development of ABS ECU with Hardware-in-the-Loop Simulation Based on Labcar System // SAE Int. J. Passeng. Cars – Electron. Electr. Syst. 2015. Vol. 8(1). P. 14–21. https://doi.org/10.4271/2014-01-2524.
- Sabbioni E., Cheli, F., d'Alessandro V. Analysis of ABS/ESP Control Logics Using a HIL Test Bench // SAE Technical. 2011. P. 2011-01-0032. https://doi.org/10.4271/2011-01-0032.
- Hart P.M. Review of Heavy Vehicle Braking Systems Requirements (PBS Requirements), Draft Report, 24 April 2003.
- Marshek K., Cuderman J., Johnson M. Performance of Anti-Lock Braking System Equipped Passenger Vehicles – Part I: Braking as a Function of Brake Pedal Application Force // SAE Technical. 2002. P. 2002-01-0304, https://doi.org/10.4271/2002-01-0304.
- Клепиков В.Б. Динамика электромеханических систем с отрицательным вязким трением: автореф. дис. … д-ра техн. наук: (05.09.03). М.: Моск. энерг. ин-т., 1989. 42 с.
- Матюшков С.Ю. Снижение автоколебаний в тяговой передаче грузового магистрального тепловоза при индивидуальном управлении асинхронными двигателями: автореф. дис. … канд. техн. наук (05.22.07). Брянск, 2013. 18 с.
- Федяева Г.А. Прогнозирование динамических процессов при нестационарных и аварийных режимах тягового электропривода с асинхронными двигателями: автореферат дис. … д-ра техн. наук (05.09., 05.22.07). М., 2008. 38 с.
- Михальченко Г.С., Федяева Г.А., Федяев В.Н. Взаимовлияние динамических процессов в электрической и механической подсистемах тягового электропривода тепловозов при переходных режимах // Тяжелое машиностроение. 2005. № 12. С. 28-32.
- Михальченко Г., Федяева Г.А., Власов А.И. Моделирование переходных режимов в асинхронном тяговом приводе локомотивов // Вестник Всероссийского научно-исследовательского института железнодорожного транспорта. 2003. № 4. С. 42–47.
- Иньков Ю.М., Федяева Г.А., Тарасов А.Н. Управление тяговым электроприводом гибридного маневрового тепловоза с асинхронными двигателями в режиме реализации предельных усилий // Электротехника. 2016. № 9. С. 31–38.
- Пасечник С.В., Галиуллин Д.Р. Влияние режимов работы тягового электрооборудования подвижного состава на энергоэффективность электрической тяги в системе городского электрического транспорта // Тинчуринские чтения: Тезисы докладов XIII молодежной научной конференции: в 3 т. Казань: Казан. гос. энергет. ун-т., 2018. Т. 1. С. 330–332.
- Киснеева Л.Н., Аухадеев А.Э., Ганеев И.Р. Влияние режимов работы тягового электрооборудования подвижного состава на энергоэффективность электрической тяги в системе город-ского электрического транспорта // Приоритетные научные исследования: сборник статей Меж-дународной научно-практической конференции. Самара, 2017. С. 25–27.
- Бакиров А.Р. Разработка методики расчета рациональных эксплуатационных режимов тяговых электродвигателей трамваев: автореферат дис.... канд. техн. наук: 05.09.03. Казань: Казан. гос. энергет. ун-т., 2003. 16 с
- Прокопьев М.В. Метод оценки фрикционных автоколебаний в трансмиссии при трогании легкового автомобиля: автореферат дис.... канд. техн. наук: 05.05.03. Тольятти: Моск. гос. техн. ун-т (МАМИ), 2002. 27 с.
- Саламандра К.Б., Корендясев Г.К. К задаче автоколебаний трансмиссии с автоматической коробкой передач // Машиноведение и инновации. Конференция молодых учёных и студентов (МИКМУС-2017): материалы конференции. М., 2018. С. 327–330.
- Автоколебательные процессы в сцеплениях автомобилей и тракторов / В.М. Шарипов, А.П. Маринкин, Н.Н. Шарипова [и др.] // Известия МГТУ МАМИ. 2013. Т. 1, № 1(15). С. 239–242.
- Батизи В.М., Лихачев Д.С. Исследование причин возникновения вибраций на переходных режимах движения автомобиля // Труды НАМИ. 2018. № 1(272). С. 61–68.
- Метод выявления потери устойчивости движения тракторов при реализации тягового усилия на прицеп или сцепной агрегат / М.М. Жилейкин, П.В. Сиротин, С.С. Носиков, Н.Н. Пу-ляев // Тракторы и сельхозмашины. 2023. Т. 90, № 1. С. 39–48. DOI: 10.17816/0321-4443-321266.
- Электрические машины: учебник для студентов высш. техн. учебн. заведений. Л.: Энергия, 1978. 832 с.
- Целиков А.И., Морозов Б.А. Исследование вибраций методических печей станов горячей прокатки // Сталь. 1973. № 10. С. 947–949.
- Андрющенко В.А. Следящие системы автоматизированного сборочного оборудования. Л.: Машиностроение, 1979. 246 с.
- 31 Терехов В.М. Исследование и разработка высокоточных многодвигательных следящих элект.роприводов для широкого класса наземных антенных установок: дис. … д-ра техн. наук: 05.09.03. М., 1981. 354 с.
- Климов А.В. Колебательные процессы в нелинейной системе индивидуального тягового электрического привода // Грузовик. 2023. № 7. С. 19–24. DOI: 10.36652/1684-1298-2023-7-19-24.
- Климов А.В. Исследование режимов возникновения автоколебаний в тяговом электроприводе электробуса в условиях эксплуатации // Грузовик. 2024. № 3. С. 3–8. DOI: 10.36652/1684-1298-2024-3-3-8.
- Патент № 2797069 C1 Российская Федерация, МПК B60K 17/12, B60L 15/20, B60L 3/10. Способ управления индивидуальным тяговым электроприводом ведущих колес многоколесного транспортного средства: № 2023103483: заявл. 16.02.2023: опубл. 31.05.2023 / А.В. Климов, Б.К. Оспанбеков, М.М. Жилейкин [и др.]; заявитель Публичное акционерное общество «КАМАЗ».
- Жилейкин М.М., Журкин М.М. Алгоритм работы антиблокировочной системы тормозов с функцией противодействия заносу для двухосных автомобилей с одной ведущей осью // Известия МГТУ МАМИ. 2020. № 1 (43). С. 51–56.
- Жилейкин М.М., Котиев Г.О. Моделирование систем транспортных средств: учебник. М.: Изд-во МГТУ им. Н.Э. Баумана, 2020. 239 с.
- Шамберов В.Н. Фрикционные автоколебания в механических системах // Известия вузов. Приборостроение. 2010. Т. 53, № 2. С. 24–28.
- Электробус КАМАЗ-6282 [Электронный ресурс]: [офиц. сайт]. URL: https://kamaz.ru/production/buses/pdf_062023/Электробус%20KAMAZ-6282.pdf (дата обращения 04.03.2024).
