Исследование точности оценки систематических ошибок по азимуту для системы РЛС

Автор: Бедин Дмитрий Александрович
Рубрика: Математическое моделирование
Статья в выпуске: 40 (299), 2012 года.
Бесплатный доступ
Изучается задача оценивания систематических ошибок РЛС по азимуту в случае, когда имеется несколько РЛС, одновременно наблюдающих за движением воздушного судна (ВС). В такой ситуации возможно восстановление ошибок по результатам наблюдения за траекторией в течение некоторого промежутка времени. Рассматривается наиболее простой случай, когда движение ВС близко к прямолинейному равномерному и происходит на достаточно большом удалении от всех РЛС. В этих предположениях разумной является линеаризация соотношений, определяющих наблюдение. В результате приходим к линейной постановке задачи оценивания неизвестных параметров систематических ошибок РЛС по азимуту. Предлагается подход к исследованию точности оценивания в зависимости от взаимного геометрического расположения системы РЛС и области наблюдения, в которой происходит полет ВС. Получены несложные и естественные условия на моменты измерений, при выполнении которых матрица ковариаций ошибок оценивания принимает простой вид. Показано, что при приближенном выполнения условий можно пользоваться упрощенной матрицей ковариаций.
Оценивание параметров, систематическая ошибка рлс по азимуту, точность оценивания, обобщенный метод наименьших квадратов
Короткий адрес: https://sciup.org/147159170
IDR: 147159170 | УДК: 528.088.3
Analysis of the estimation accuracy of azimuth systematic errors for system of radars
The problem of the azimuth systematic errors estimation is investigated in the case when there are a number of radars observing a moving aircraft. The errors can be identified processing the data recieved during some time interval. We consider the simplest variant when the aircraft motion is almost uniform and straight-line and its location is far from all radars. The linearization of the observation equations is reasonable under these assumptions and leads to a linear parameter estimation problem with the azimuth systematic errors as unknown parameters. An approach to analyse the estimation accuracy depending on the relative mutual location of the observation region and all radars is suggested. Some easy and natural conditions on the observation instants are elaborated. Under these conditions the covariation matrix has a simple form. We demonstrate that this form is useful also in the case when our conditions are fulfiled approximately only.
Текст научной статьи Исследование точности оценки систематических ошибок по азимуту для системы РЛС
Несмотря на развитие новых методов навигации, в авиации главным остается наблюдение за воздушными судами (ВС) с помощью радиолокационных станций (РЛС). РЛС как измерительный прибор имеет погрешности наблюдения, в том числе систематические. Наибольшие проблемы для использования РЛС-информации доставляет систематическая ошибка РЛС по азимуту. Ее оценивание является важной задачей.
В гражданской авиации применяются трассовые радиолокаторы, работающие на больших расстояниях, и обычным является наблюдение за движением одного ВС одновременно несколькими РЛС. Для этих РЛС возможно оценивание систематических ошибок по азимуту на основе данных совместного наблюдения [1]. При этом используется то обстоятельство, что направление действия систематической ошибки по азимуту у каждой РЛС свое.
В работе изучается вопрос о зависимости точности оценивания систематических ошибок по азимуту от взаимного расположения системы РЛС и наблюдаемого участка траектории ВС. В различных предположениях о движении ВС и условиях наблюдения, а также для различных алгоритмов оценивания такая зависимость может быть разной. Исследование проводится для ≪ эталонной ≫ задачи с наиболее простой ситуацией наблюдения, при этом берется наиболее простой алгоритм оценивания, оптимальный в смысле математического ожидания квадрата отклонения. Полученные результаты могут служить ориентиром и для других алгоритмов, минимизирующих этот критерий.
2. Модель наблюдения
Будем изображать все РЛС, движущееся ВС и отметки замеров на плоскости Π ≃ R 2 . Например, это может быть плоскость, касательная к поверхности Земли в некоторой точке.
Все объекты на плоскости П получаются проектированием (некоторым заданным способом) на нее пространственных объектов.
Радиолокаторы в дискретные моменты времени измеряют дальность до ВС и азимут (угол между направлением на ВС и направлением на север). Предполагаем, что в каждый момент t i измерения производит только одна РЛС. Общее количество моментов измерений обозначим символом n (т.е. i меняется от 1 до n), количество моментов измерения k-й РЛС — символом n k . Пусть m — число всех РЛС (k меняется от 1 до m). Номер наблюдающей РЛС задается известной функцией от номера измерения: k = k(i).
Обозначим вектор истинного положения ВС на плоскости П в момент времени t i символом x i , а отметку замера — z i . Предполагаем, что отметка замера откладывается на П от точки радиолокатора по измеренной дальности и азимуту.
В каждой точке x плоскости П введем единичный вектор e r k (x) Е R 2 направления от k-й РЛС в данную точку. Этот вектор указывает направление действия ошибки по дальности. Также введем вектор e f k (x) Е R 2 , ортогональный вектору e r k (x), получающийся из e r k (x) правым поворотом. Такой вектор связан с направлением действия ошибок по азимуту. Расстояние от точки x до k-й РЛС обозначим символом r k (x).
Ошибки РЛС имеют различную природу и свойства. В ходе процесса радиолокации (передача и прием радиоволн, детектирование сигнала) для каждого момента t i возникают ошибки измерения дальности w i r и азимута w i ϕ с хорошими статистическими свойствами:
w i
А
w ir
ϕ i
E { w i } =
E {w i wT} = O 2 4
О О
О о
r 2
S k(i) 4 E { w i w T } = kto
О
ϕ 2 ° k(i)
,
V i, j Е 1,n, i = j.
Среднеквадратичные отклонения по дальности и азимуту зависят от того, какой радиолокатор производит наблюдение в момент t i .
Существуют и другие ошибки, обусловленные искажениями при обработке информации, механическими сбоями и износом РЛС. Они уже не имеют хороших статистических свойств. Среди них наибольшее значение имеют систематические ошибки РЛС по азимуту X k , к Е 1, m. Введем обозначение X = [X 1 ... X m ] T Е R m .
В принятых обозначениях уравнение наблюдения, связывающее измерение с истинным положением, запишется следующим образом:
z i = x i + e rk(i) (x i ) w r + e f^i/ x i ) r k(i) ( x i ) ( X k(i) + w f ) . (2)
Отметим, что уравнение (2) нелинейно.
Если мы хотим ввести понятие точности оценивания величин λ k в зависимости от взаимного геометрического положения ВС и всех РЛС, разумно рассматривать наблюдения за небольшими участками траекторий ВС, на которых расстояния r k до всех РЛС и направления e rk ≪ точка — РЛС ≫ (а также жестко с ними связанные векторы e ϕk ) значительно не изменяются, и, в первом приближении, соответствуют некоторой точке x * Е П. Область вокруг точки x ∗ , где выполняются указанные предположения, можно определить, например, как все x Е П, для которых выполняются следующие неравенства с некоторыми малыми константами K i и K 2
| r k (x) - r k (x * ) | r k (x * )
< K i , | e rk (x)
- e rk (x * ) | < K 2 , | e ^k (x) - e ^k (x * ) | < K 2 ,
V k Е 1, m.
В этой области разумно перейти к уравнению с ≪ замороженными коэффициентами ≫ , зафиксировав значение аргумента x в функциях e rk (x), e ^k (x), r k (x) и сделав его равным x * :
Z i = x i + e rk (x * ) w r + e fk(i) (x * ) r k(i) (x * ) ( X^ ) + w f ) . (3)
Уравнение (3) также можно получить, производя линеаризацию соотношения (2) по переменным X i , А в окрестности точки x i = x * , Л = 0.
Для постановки задачи оценивания недостаточно знать уравнение (2) или даже (3) — требуется задать закон изменения переменной x i по времени.
Гражданские ВС на значительных участках своего полета выдерживают прямолинейное равномерное движение. Кроме того, известно, что гражданский самолет — массивный объект. Поэтому при рассмотрении малой области наблюдения и короткого участка траектории разумно предполагать движение настолько близким к прямолинейному равномерному:
Xi = X0 + Vo (ti - to) , что погрешностями этого приближения можно пренебречь. В уравнении (4) величины Xo, Vo E R2 — неизвестные положение и скорость на некоторый заданный момент времени t0 .
Введем вектор-столбец 9 E R 4 , включающий в себя неизвестные параметры x o , V o прямолинейного равномерного движения и матрицу преобразования A(t):
9 =[xo]' A ( t ) = [
1 0 t
0 1
-
t o
0t
- t o
]
.
Уравнение движения (4) запишется в виде
X i = A(t i ) 9 .
Обозначим символами C ik (x), D k (x) следующие матрицы:
C ik (x) = [ A(t i )
|
0 • 0 |
0 • • 0 |
r k (x)e ^k (x) |
0 • 0 |
0 • 0 |
|
5 |
k+3 |
k+4 |
k+5 |
4+m |
, erk(x) rk(x)e^k(x) ] .
D k (x) = [
В матрице C ik (x) в части, стоящей справа от элементов матрицы A(t i ), ненулевым является лишь столбец с номером к +4 (номера столбцов подписаны снизу матрицы).
Вводя вектор-столбец всех неизвестных y = [ 9 T A T ] T и используя матрицы, указанные выше, а также предположение о движении в виде уравнения (5), получим матричный вид уравнения наблюдения (3):
Z i = C i k(i) (x * ) у + D k(i) (x * ) W i .
3. Задача оценивания
Задача оценивания неизвестного вектора-столбца у состоит в построении функции у (зависящей только от измерений { z i } n =1 ), близкой к у в заданном смысле. Для линейного уравнения наблюдения (7) со случайными ошибками w i , удовлетворяющими (1), известен классический результат: минимум критерия
Jy ^ E {||у - yh2} в классе линейных несмещенных оценок достигается на оценке обобщенного метода наи- меньших квадратов [2]. Формулы оценки имеют вид
P -1
n - 1 n
= EcT k(i) D k V D 1 C ik(i) , у = PEc i T k(i) (D k(i) ^ k(i) D T (i ))
i=1 i=1
z i . (8)
Матрица P является матрицей ковариации ошибок оценивания: P = E { (y — y)(y — y) T } . В формуле (8) для простоты записи не указана зависимость матриц C i k , D k (а как следствие, и P) от переменной x ∗ . Будем опускать символ такой зависимости в случаях, когда речь идет о значениях при фиксированном x ∗ .
Известным фактом является то, что часть координат столбца y, например λ, оптимально приближается в смысле минимума критерия J a = E {|| A — A h 2 } частью A координат столбца y = [0 T A T ] T . То же самое можно сказать и об оценивании конкретной величины λ k : компонента λ k столбца λ минимизирует отклонение от истинного значения λ k в смысле критерия J \k = E {| A k — A k | 2 } . Также известна связь между значениями критериев J y , J a , J λ k и матрицей ковариации:
J y = E { h y — A h 2 } = tr { P } , J a = E {|| A — A h 2 } = tr { P AA } ,
J xk = E {|A k — A k | 2} = P xx,kk . (9)
Здесь P aa = E { (A — A)(A — A) T } — блочная часть матрицы P , соответствующая части A переменной y , а P λ λ, k k — k-ая компонента ее главной диагонали. Вообще, в нашей задаче, связанной с оцениванием части координат, матрицы P и P -1 удобно представлять в блочном виде:
P θθ P θλ
P λθ P λλ
- 1 P θθ P θλ
P = P a, P aa '
При этом для подматриц справедливы соотношения
P eA = P T , P ee = P T , , P aa = P T , P eA = P T , P ee = P T , , P aa = P T -
Матрицу Pλλ можно получить, не обращая матрицу P-1 целиком. Известно [2] соотно- шение
P
= P - 1 + P - 1 P A 9
/ -1
(P ee — P 9 A P - 1 P A 9) P e A P TA1 .
Выражение (10) также полезно и для анализа структуры P , поскольку блоки P θ θ , P θ , P связаны с блоками матриц C i k , D k .
4. Оценивание в зависимости от геометрического положения
Задавшись формулами (9) и (10), а также конкретным видом (6) матриц C ik (x * ) и D k (x * ), можно исследовать зависимость критериев J a и J a к от точки x * : J a = J a (x * ), J A к = J a к (x * ). Тем самым решается задача оценки точности в зависимости от взаимного геометрического положения области наблюдения и всех РЛС. Однако анализ зависимости затруднен вследствие того, что матрицы C ik (x * ), D k (x * ) зависят не только от x * , но и существенным образом от моментов времени измерений t i .
Первое слагаемое P - 1 (x * ) в формуле (10) имеет простое выражение, не зависящее от точки x ∗ и моментов измерений t i :
- 1
A A ^ ^
σ ϕ2
n 1
... 2
σϕ m nm
Поскольку первое и второе слагаемые в (10) являются положительно определенными матрицами, матрица P - 1 (х * ) задает « фоновый » уровень точности для всех положений х * , который нельзя уменьшить.
Зависимость от геометрического положения x ∗ для задачи оценивания систематических ошибок по азимуту проявляется в формуле (10) через второе слагаемое. В важном частном случае, который исследуется ниже, удается избежать зависимости от моментов t i , и, как следствие, придать универсальный вид зависимости критериев J a (х * ) и J a к (х * ) от х * . Рассмотрим подробнее второе слагаемое.
Введем для каждой РЛС понятие среднего времени своих измерений (относительно времени t 0 ):
t k = — У (t i - t o ), I j = { i : 1 < i < n, k(i) = j } • n k i ∈ Ik
Также введем величины, которые можно назвать, соответственно, вторым и центрированным вторым моментами для времен измерений k-ой РЛС:
q k = - У (t i - t o ) 2 , q k = - У (^ - t o - k k ) 2 = q k
-
2 t k .
nn k i∈Ik k i∈Ik
Для удобства записи рассмотрим дополнительные матрицы
E k = [ e rk ( x * ) e ^k ( x * ) ] , s k = [ 0 (r k (x * )^) 2 ] •
Ниже не будем отмечать зависимость матриц и их компонентов от аргумента x ∗ . Отметим, что выполняются следующие соотношения:
— 1 TT nT ‘ pT (nT 1 ‘- 1 pT
E k = E k , D k ^ k D k = E k ^ k E k , ID k ^ k D k ) = E k ^ k E k •
Во введенных обозначениях блочные компоненты матрицы P -1 имеют вид
ϕ - 2 n 1 σ 1
P a a =
ϕ n m σ m
P ee =
m
E Ek ^k—1 ET k=1
m
E tkEk ^k—1 ET k=1
m
E q k E k ^ k —1 E T k =1
m
E q k E k Ч- 1 E T k =1
P qa =
ϕ - 2
n 1 σ 1 r 1
t 1
e ϕ 1
e ϕ 1
n m
ϕ σ m
m
Z4
t m
[e 1 e ϕm
V 1 e ϕm
Для анализа выражений, получающихся при детальном рассмотрении этих блочных матриц, полезно определить «матрицу преобразования» S(t):
S (t) =
10 t 0 010t 0010 0001
которая будет в дальнейшем активно использоваться.
Вычислим элементы второго слагаемого в формуле (10):
m
= E
S (tk )
T
k=1
,^^-
,^^-
- 1
Q = P eA P AA
r i1 S(* i )
T
r l
- 1
e ^ 1
,^^-
Z4
e ^ 1
t l e ^ 1
R = P ee
-
·
·
·
- 1
r m
n k σ k r
-1 T erkerk
O
O
·
·
·
e ϕ m
T
S ( t m )
,
P eA P - l P Ae =
n k q k E k Е^ 1 E T
m
S (t k ) = E
S ( t k )
T
A k
O
1^^-
k=1
O
q k B k
S (t k ).
С учетом новых обозначений формула (10) записывается следующим образом:
P AA = P '
+ Q T R -1 Q.
Видно, что матрица ковариаций P λ λ зависит от времен t i через параметры t k и q k .
Предложение 1. Пусть выполнено соотношение
Z4
t l =
Z4
.
.
.
— tm
^
= t.
Тогда в выражении матрицы P λ λ отсутствуют времена измерений t i .
Доказательство. При условии (14) выражения (11)
и (12) приобретают вид
Q = S(tt) T r -1
R = S(t) T
m
E k=1
e ^ 1
A k
O
O qkBk
- 1 r m
e ϕm
= S(t) T Q,
S(t) = s(t) T R s (t).
Матрица S(t) обратима, и поэтому все матрицы S(t) взаимно уничтожаются в общем выражении Q T R -1 Q . Вследствие специфического вида матрицы Q в окончательное выражение от матрицы R входит только верхний левый блок, который равен 52m =1 A k и не содержит времен измерений t i . Компоненты Q также не содержат t i . Это завершает доказательство.
Матрицу P , посчитанную при условии (14), обозначим символом P ∗ :
Paa = P - А1 + Q T R - 1 Q.
Условие (14) не требует наложения каких-либо сложных ограничений на процесс наблюдения, и (в приближенном смысле) выполняется естественным образом, например, если РЛС производят измерения с некоторым заданным шагом по времени.
Пример 1. Пусть k-я РЛС производит измерения на промежутке [0,^] в моменты tjk = t1k + ^k (jk 1) + ^jk , jk = 1, nk •
Здесь Ak — шаг наблюдения k-й РЛС, 6 j k — малая случайная погрешность: E { 6 j k } = 0, | 6 j k | ^ A k . В этих условиях выполнены соотношения
Zv t1
Z tm
ϑ
t 2 ,
E { Z k } - |
< A.
- 2
5. Анализ матрицы Р\х при приближенном выполнении (14)
В этой части рассмотрим подробнее ситуацию, приведенную в примере 1, а именно, случай приближенного выполнения соотношения (14). Интересен характер зависимости матрицы P λ λ от малых вариаций величин t k .
Заметим, что для матрицы S (t) справедливо следующее свойство:
S(t 1 + t 2 ) = S (t 1 )S (t 2 ) = S(t 2 )S(t 1 ) , V t i ,t 2 G R .
Предложение 2. Пусть выполнены соотношения tk = t + Ek , qk = (1 + ak) q, Vk G 1,m, (16)
где ε k , α k — некоторые малые числа. Тогда
P xx = PG + E >j + o ( ^2 ) . (17)
Здесь H ij — матрицы, не зависящие от E k и t i ; ||e|2 = Ekm=i e 2 — квадрат евклидовой нормы вектора-столбца, составленного из всех ε k .
Доказательство. Рассмотрим второе слагаемое в формуле (13) с учетом соотношений (11), (12). Каждую матрицу S(t k ) представим в виде произведения S(t k ) = S(E k )S(t) Получим следующие выражения:
Q = P ex P - X = S (tt) T r -1 S ( e i ) t
= S(t ) T
r
e ϕ 1
ε 1 e ϕ 1
R = P ee - P 9A P -A 1 P A9 =
S (t) T
= S(tt) T
m
E Ak k=1
m
ε k A k k =1
e ϕ 1
- 1
m
r m -1 S ( E m ) T
e ϕ m
ε m e ϕ m
m
E S(Ek)T k=1
m 7
εkAk k=1
m
E ( qk Bk + Ek Ak k=1
e ϕ m
= S(t ) T Q e ,
A k
O
O qkBk
S (E k ) S(tt) =
S(t) = S(t) T R e S(t).
После этого формула (13) приобретает вид
P x A = P - A + Q T R - 1 Q e
Обозначим через Г правый нижний блок 2 х 2 матрицы R e 1 :
Г =
mm
< Е qkB» + Е£2 A^k - k=1 k=1
- 1
m m - 1 m
E » a » E 4 E » a » b .
k=1 / \k=1 / \k=1 /
Его можно представить в следующем виде:
r->+o ^) L
m -1
Г 0 = I E(1 + a k )Bkj •
Матрица Г о не зависит от величин E k и q. Все остальные блоки матрицы R e 1 выражаются через Г:
r 1 =
m - 1 m - 1 m m m - 1 m - 1 m
( Й Ak) +( Й Ak) ( Й EkAk)Г( Й EkAk){ Й a5») — Й a5») Й EkAk)Г k=1 k=1 k=1 k=1 k=1 k=1 k=1
-
m m-1
Г ^Й E k Akj ^Й Akj
Г
.
Окончательное выражение для P λ λ имеет вид
P AA = P AA
+ q T r - 1 q £ = p aA +
T r 1 e .1
.
.
.
T r m e ϕ m
(E A 5 ») 1 [ r* 1
••
•
r m e .m j +
+
r 1 e T1
.
. .
T r m e ϕ m
-
-
m - 1 m m m - 1
E Aik E Ek Aik Г E Ek Aik E Aik k=1 k=1 k=1 k=1
~ T r 1 e. 1
.
.
.
T rmeϕ m
m - 1 m
Ib 7 lb E k A k^ Г l Е 1 Г 1 6 . 1 •••
E1 r 1 e T 1
.
.
.
T ε m r m e ϕ m
m m- 1
Г 1Ь ε k A k k=1 Ak\ r 1 e . 1
•
+
„т E1 r 1 e^ 1
.
.
.
nev 1
•
•
•
••
r m e ϕ m
-
ε m r m e ϕ m
-
r m e .m j +
Г Еще . 1 •••
ε m r m e ϕ m
.
T ε m r m e ϕ m
Как видно, в этом выражении отсутствуют члены с ε k в степени 1. Члены с ε k в степени выше 2 появляются только при разложении Г по формуле (18). Также при этом разложении появляется множитель 1/q. Первые два слагаемых соответствуют P A а. □
Отметим, что формула (17) не только говорит об ≪ устойчивости ≫ матрицы P λλ к малым возмущениям в величинах t » , но и задает меру того, какие возмущения считать малыми. А именно: P aa в формуле (17) зависит от e » / ^ q. Т.е. малость E » определяется по сравнению с величиной ^ q — « характерным разбросом » времен t i .
6. Численные построения
Соотношение (17) свидетельствует о том, что в практически важном случае (16) приближенного выполнения равенства (14) точность оценивания систематических ошибок РЛС по азимуту с хорошим качеством определяется формулой (15). Задавшись ею, можно численно построить зависимость критериев J λ , J λk от геометрического положения x ∗ центра области наблюдения на плоскости П. На рисунке представлены результаты численных расчетов функции ^ J a ( x *) для системы четырех РЛС Новосибирской зоны наблюдения. По осям откладывается расстояние в км. РЛС расположены в точках (0, 0), (1, - 2), (225, 33), (25, 380). Оттенки серого на графике соответствуют различным значениям критерия ^ J a ( x *) : более темные отвечают меньшим значениям.
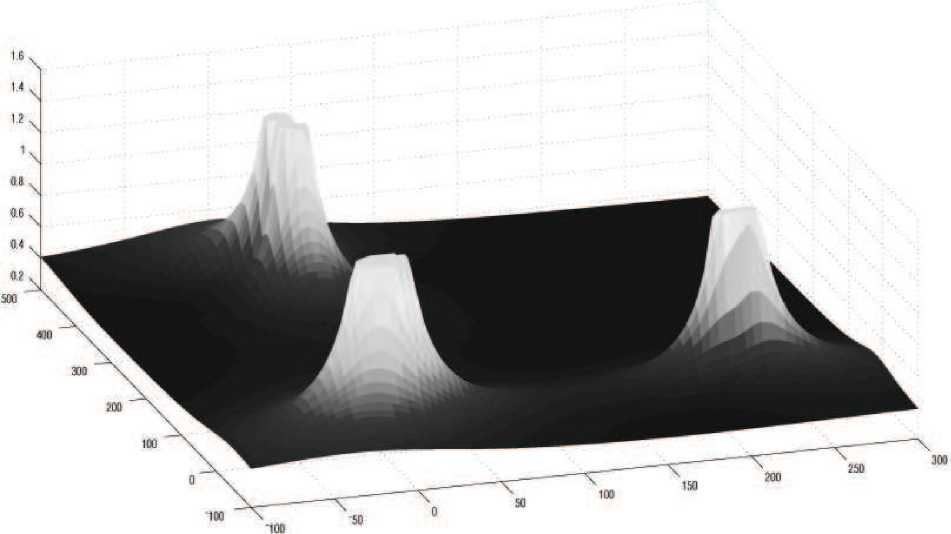
График критерия лУ J a ( x * )
Полученные в статье результаты могут быть применены в перспективных алгоритмах мультирадарной обработки.
При написании статьи использованы результаты работы автора по договору о сотрудничестве между Институтом математики и механики УрО РАН (г. Екатеринбург) и фирмой ≪ Новые информационные технологии в авиации ≫ (г. Санкт-Петербург). Работа поддержана УрО РАН (проект 12-П-1-1002) и РФФИ (проект 12-01-31247 мол_а).
Список литературы Исследование точности оценки систематических ошибок по азимуту для системы РЛС
- Идентификация систематических ошибок нескольких РЛС по азимуту/А.Г. Иванов, Д.А. Бедин, А.А. Федотов, А.В. Беляков, К.С. Строков//Вестн. Нижегород. ун-та им. Н.И. Лобачевского. -2011. -№4, часть 2. -С. 147-148.
- Степанов, О.А. Основы теории оценивания с приложениями к задачам обработки навигационной информации. Часть 1. Введение в теорию оценивания/О.А. Степанов. -СПб.: ЦНИИ «Электроприбору 2010.
