Исследование устойчивости движения подвижного модуля экспериментальной установки при испытании активных ротационных рабочих органов почвообрабатывающих машин

Автор: Купряшкин Владимир Федорович, Наумкин Николай Иванович, Купряшкин Владимир Владимирович
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Технические науки
Статья в выпуске: 2, 2016 года.
Бесплатный доступ
Введение. Статья посвящена теоретическому изучению устойчивости движения подвижного модуля экспериментальной установки, предназначенной для исследования активных ротационных рабочих органов почвообрабатышающих машин. При этом учитываются конструктивные особенности подвижного модуля и особенности силового взаимодействия активных ротационных рабочих органов с почвой. Кроме этого, рассматриваются особенности проведения экспериментальных исследований активных ротационных рабочих органов почвообрабатывающих машин. Из анализа ранее проведенных как теоретических, так и экспериментальных исследований данного типа рабочих органов отмечается возможность нарушения устойчивости хода подвижного модуля, что в свою очередь отрицательно сказывается на обеспечении выполнения заданной методикой программы эксперимента. Также из анализа некоторых исследований следует, что те допущения, при которых они проводились, не позволяют в полной мере учитывать характер влияния протекающих динамических процессов взаимодействия активных ротационных рабочих органов с почвой на устойчивость движения тележки экспериментальной установки. Материалы и методы. Для устранения недостатков в проведенных исследованиях была изучена устойчивость движения подвижного модуля экспериментальной установки с учетом его конструктивных о собенно стей и условий проведения эксперимента. Базой послужил синтез основных положений и законов механики и экспериментальных данных силового взаимодействия активных ротационных рабочих органов с почвой. В результате теоретического исследования была составлена расчетная схема нагружения тележки экспериментальной установки с учетом ее конструктивных особенностей и силовых факторов, действующих на опорные колеса и исследуемые активные ротационные рабочие органы. Также, с учетом особенностей планирования эксперимента и почвенных условий, были определены аналитические и графические зависимости основных силовых характеристик, определяющих устойчивость движения подвижного модуля. Результаты исследования. Обработка результатов исследования позволила выявить зоны устойчивого и неустойчивого движения подвижного модуля экспериментальной установки. Наличие зоны неустойчивого движения тележки приводит к нарушению задаваемых планом проведения экспериментальных исследований условий и отрицательно сказывается на их качестве и достоверности получаемых результатов. Обсуждение и заключение. Все вышеизложенное позволяет утверждать, что для обеспечения устойчивости движения подвижного модуля экспериментальной установки требуются определенные конструкторские решения.
Исследование почвообрабатышающих машин, устойчивость движения, активный ротационный рабочий орган, экспериментальная установка, подвижный модуль, твердость почвы
Короткий адрес: https://sciup.org/14720212
IDR: 14720212 | УДК: 620.1.05:631.31 | DOI: 10.15507/0236-2910.026.201602.246-258
Stability of motion of mobile module of experimental setup in the study of active rotary working of machines for soil treatment
Introduction. The paper is devoted to the theoretical study of stability of movement of the movable unit of the experimental setup intended for the exploration of the active rotational working organs of the car for soil treatment. This takes into account the design features of the mobile unit and features active rotary force interaction of working bodies with the soil. From the analysis of previously conducted both theoretical and experimental studies of this type of working bodies noted the possibility of breaking the stability of the mobile stroke unit, which in turn will have a negative impact on the enforcement of a given method of the experiment program. From the analysis of previous studies shows that the assumptions under which they were made, not allow you to fully take into account the nature of the effect occurring dynamic processes of interaction of active rotary working bodies with the soil on the experimental setup truck driving stability. Materials and Methods. To address the shortcomings in the research, based on a synthesis of the main provisions and laws of mechanics and the experimental data of active rotary force interaction of working bodies with the soil, carried out theoretical studies of stability of movement of the movable unit of the experimental setup in view of its design features and conditions of the experiment. Results. A theoretical study was composed of loading trolley design scheme of the experimental setup with regard to its design features and power factors acting on its working elements, namely, the wheel bearing and studied active rotary working bodies. Processing results of the study allowed the weary twist zone of stable and unstable movement of the movable unit Expo tal installation. The presence of unstable movement zone carts at-leads to a breach of the conditions set by the plan of experimental-governmental research and a negative impact on their quality and purity. Discussion and Conclusions. All of this suggests that to ensure the sustainability of the rolling motion-module of the experimental setup is required the relevant design solutions.
Текст научной статьи Исследование устойчивости движения подвижного модуля экспериментальной установки при испытании активных ротационных рабочих органов почвообрабатывающих машин
Для подтверждения и дополнения теоретических предпосылок в области исследования рабочих органов почвообрабатывающих машин широко ис- пользуются специализированные лабораторные установки, позволяющие имитировать реальные условия взаимодействия с почвой и представляющие собой, как правило, почвенный канал с подвижными и тяговыми модулями [1–2]. Однако использование данного типа лабораторных установок для исследования активных рабочих органов (АРО) почвообрабатывающих машин требует учета силовых факторов их взаимодействия с почвой [3], а именно подталкивающей и выталкивающих сил, которые могут отрицательно сказаться на устойчивости подвижного модуля (тележки) и, следовательно, на обеспечении конкретных значений переменных факторов определяемых программой эксперимента [4–6]. Среди большого количества таких переменных факторов, к которым можно отнести конструктивные и технологические параметры АРО почвообрабатывающих машин (диаметр, глубина обработки, кинематический параметр, подача на нож и т. д.), а также параметры, характеризующие состояние обрабатываемой почвы (влажность, плотность, твердость), по мнению многих исследователей [2; 7–9], можно выделить подачу на нож, величина которой определяется зависимостью:
S =
2 π v Π
Z ω ф
где v п – скорость поступательного движения тележки, м/с; Z – число ножей в секции АРО; ω ф – угловая скорость АРО, рад/с.
Из выражения (1) следует, что одним из возможных способов исследования конкретного значения подачи на нож АРО, является определяемый программой выбор соответствующей величины поступательной скорости тележки экспериментальной установки, значение которой должно оставаться постоянным в ходе исследования, поскольку это условие является обяза- тельным для получения достоверных результатов эксперимента.
Обзор литературы
Согласно наблюдениям, в ходе проведенного исследования АРО почвообрабатывающих машин, на некоторых определенных режимах, характеризующихся большими значениями глубины обработки, подачи на нож и твердости почвы [10], отмечалось нарушение устойчивости движения тележки заключающееся в отклонении ее поступательной скорости от первоначально заданного программой эксперимента значения. Однако это утверждение основывалось только на практическом наблюдении. В исследованиях [11–12] были рассмотрены теоретические аспекты обеспечения устойчивости движения тележки, достигаемого за счет соблюдения следующего условия:
F cm ≥ F xe , (2)
где Fст – суммарная сила сопротивления перекатыванию тележки, Н; Fxe – значение подталкивающей силы взаимодействия АРО с почвой приведенной к оси вращения опорных колес тележки, Н.
Результаты теоретических исследований показали, что из-за действия подталкивающей силы, возникающей в результате взаимодействия АРО с почвой, может происходить нарушение условия (2), вследствие чего поступательная скорость увеличивается, что в свою очередь приводит к нарушению заданных условий проведения эксперимента. Однако данные теоретические изыскания проводились с рядом допущений, не позволяющих учитывать действие на тележку экспериментальной установки всех силовых факторов, характерных для исследуе- мых АРО, а также конкретных почвенных условий и особенностей программы проведения эксперимента.
Таким образом, указанные недостатки проведенных исследований не позволяют в полной мере учитывать характер влияния протекающих динамических процессов взаимодействия АРО с почвой на устойчивость движения тележки экспериментальной установки с учетом конкретных программ эксперимента.
Материалы и методы
Предлагаемый материал посвящен теоретическому исследованию устойчивости движения тележки экспери-
MORDOVIA UNIVERSITY BULLETIN ментальной установки, основанному на синтезе основных положений и законов механики и экспериментальных исследований взаимодействия АРО с почвой, позволяющему устранить недостатки ранее проведенных изысканий в данной области.
На 1-м этапе предлагаемого исследования составим расчетную схему нагружения тележки экспериментальной установки с учетом ее конструктивных особенностей и силовых факторов, действующих на ее рабочие элементы, а именно опорные передние 1 и задние 2 колеса, а также исследуемые АРО 3 , которые размещены на раме 4 (рис. 1).
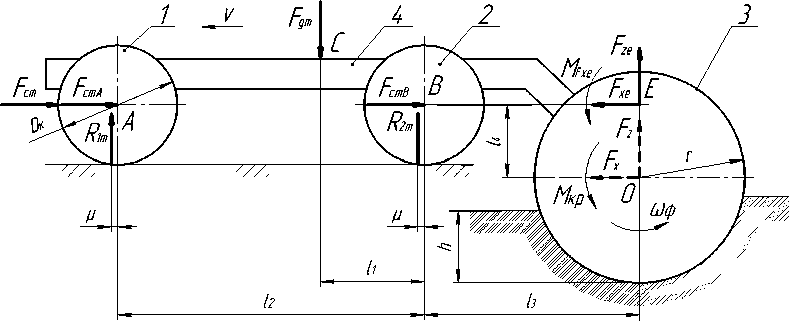
Р и с. 1. Схема нагружения тележки экспериментальной установки
F i g. 1. Truck loading scheme of experimental setup
Согласно вышеизложенному, для исключения отрицательного влияния подталкивающего усилия на устойчивое движение тележки необходимо выполнения условия (2), для анализа которого возникает необходимость определения значений сил Fст и Fxe .
Для этого приведем систему сил, действующих на тележку, к линии расположения осей вращения опорных колес 1 и 2, то есть подталкивающую Fx и выталкивающую Fz силы, действующие на АРО 3 при их взаимодействии с почвой, приведем к т. Е. При этом в данном случае система указанных сил будет заменена на систему сил Fxе и Fzе и момент пары сил МFxе (см. рис. 1); причем Fxе = Fx, Fzе = Fz, а значение момента МFxе будет определяться следующей зависимостью:
M Fxe = F x l 4 10 - 3 , (3)
где l 4 – расстояние от центра вращения АРО (т. О ) до линии расположения осей вращения опорных колес (т. Е ), мм (с учетом анализа геометрии конструкции экспериментальной тележки и при условии фрезерования почвы на глубину h = 12 см l 4 = 360 мм).
Для дальнейшего преобразования выражения (3) воспользуемся установ- ленным в ходе экспериментальных исследований АРО уравнением [1]:
Fx = 4,5 – 7 p –3 S + 2496 pS , (4)
где p – твердость почвы, МПа; S – подача на нож, м.
Подставив в (3) выражение (4), получим:
М:„ = (4,5 - 7Р - 3S)14IO-3.(5)
Для определения силы сопротивления Fст воспользуемся рис. 1, из которого следует, что:
F = F . + F „ cm cmAcmB где FстА и FстВ – силы сопротивления перекатыванию передних и задних колес тележки соответственно, Н.
Учитывая рекомендации [13] для колес с ребордами, силы сопротивления их перекатыванию будет определяться зависимостями:
( 2 ц + fd )
FcmA Rm 1 I I P ;
V Dk
_ ( 2 ц + fd ^ „
FcmB Rm2 I IP , к Dk )
где Rm 1 и Rm 2 – силы давления на передних и задних колесах тележки соответственно, Н; m – коэффициент трения качения, мм (согласно рекомендациям [12], для чугунного колеса и стального рельса m = 0,5 мм); f – коэффициент трения в подшипниках осей колес (для подшипников качения f = 0,01 [Там же]); d = 35 мм – диаметр оси колес под подшипник; D к = 200 мм – диаметр колес; β = 0,5 мм – коэффициент, учитывающий сопротивление от трения реборд [Там же].
Для определения сил Rm 1 и Rm 2 воспользуемся уравнением моментов
^ M = 0 , то есть с учетом схемы нагружения (см. рис. 1) получим:
I M a = R b 2 1 2 — F gB ( 1 2 — 1 1 ) — — Fz e ( 1 2 + 1 2 ) + MF xe 10 3 = 0 ,
где Fgm – сила тяжести тележки, Н; Fze – зна g чение силы Fz приведенной к оси вращения опорных колес тележки, Н; l 1 и l 2 – расстояние от центра масс (т. С ) до оси задних колес (т. В ) и база тележки соответственно, мм (для рассматриваемой конструкции тележки l 1 = 300 мм; l 2 = 1 100 мм); l 3 – расстояние от центра фрезбарабана (т. О ) до оси задних опорных колес (т. Е ), мм (с учетом анализа геометрии конструкции тележки и при условии фрезерования почвы на глубину h = 12 см; l 3 = 800 мм).
Из выражения (9) получим:
R b 2
F gB ( 1 2 — 1 1 ) — F ze ( 1 2 + 1 3 ) — M Fxe Ю' 1 2
. (10)
Сила тяжести Fgm с учетом массы тележки mm = 380 кг g будет равна:
FgB = gm B = 9,81 . 380 = 3728 H. (11)
Аналогично определяем значение силы Rm 1, то есть составляем предварительно уравнение моментов ^ M b = 0 , т. е.
^ M b =- R b 1 1 2 + F gB l i + + F ze l 3 + M pxe 10 - 3 = 0.
Откуда получим:
RB 1
F gB l i + F ze l 3 + M pxe 10 3
l 2
Подставим зависимости (13) и (10) в выражения (7) и (8) соответственно:
F cmA
F gB l i + F z. l 3 + M Fxe 10 3 ( 2 Ц + fd )
1 2 l D : j
в ; (14)
F „( L - 1. ) - F ( L + L ) - M. 10 3
gB 21 ze 23 Fxe cmB i l2
x ^2Hf ^p.(15)
Тогда, с учетом (14) и (15) и необходимых преобразований, зависимость (6) примет вид:
FcT = (FgB — Fze) [2^^] в .(16)
Для дальнейшего решения уравнений (14), (15) и (16) воспользуемся зависимостью (4) и установленными в ходе экспериментальных исследований АРО уравнениями [1]:
Fz = 23,2 + 42,2 p –
– 66 S + 49,21 pS +42,5 p 2; (17)
М к = 4 + 78 p – 746 S +
+ 11р19 pS – 53 p 2 + 5189 S 2. (18)
В результате подстановки и преобразований получим:
F
CTA
F
CTB
gm B 1 1 + (23,2 + 42,2 p - 66 S + 49,2 pS + 42,5 p 2 ) 1 3 + + (4,5 - 7 p - 3 S ) 1 4
gm B( 1 2 — 1 1 ) — (23,2 + 42,2 p - 66 S + 49,2 pS + 42,5 p 2 ) x x ( 1 2 + 1 3) - (4,5 - 7 p - 3 S ) 1 4
2 ц + fd ] в
D k J 1 2 ’
2 ц + fd ] в
D k J 1 2 ;
F cm = ( gm B - 23,2 - 42,2 P + 66 ^ — 49,2 pS — 42,5 p 2) I 2 ^ + fd I p . (21)
D
Результаты исследования
Для анализа динамики сил сопротивления FсmА и FсmВ перекатыванию передних и задних колес тележки соответственно подставим в зависимости (19) и (20) принятые и известные значения параметров, а также минимальное и максимальное значения подачи на нож S (Smin = 0,03 м; Smax = 0,11 м) и значения твердости почвы p в диапазоне от 0,25 до 1,65 МПа, предусмотренные методикой планирования эксперимента при исследовании АРО [6; 8; 10]. Результаты расчетов сведем в табл. 1. Из анализа значений табл. 1 и графиков сил FсmВ и FсmА (рис. 2) следует, что данные силы имеют переменный характер, на который зна- чительное влияние оказывает твердость почвы; при этом подача на нож практического значения на динамику сил не имеет. Кроме этого, характер изменения FсmА и FсmВ в зависимости от твердости почвы противоположны, то есть с увеличением твердости почвы от 0,25 до 1,65 МПа наблюдается рост силы сопротивления перекатыванию передних колес FсmА от 34,3 до 38,4 Н, а сила сопротивления перекатыванию задних колес FсmВ снижается с 87,8 до 77,8 Н. Из анализа графиков также следует, что значения силы FсmВ превышают значения силы FсmА в 2,5 раза при минимальных значениях твердости почвы и в 2 раза – при максимальных.
Т а б л и ц а 1
T a b l e 1
Значения сил сопротивления перекатыванию передних FстА и задних FстА колес тележки Values of rolling resistance forces front FстА and rear FстА bogie wheels
|
Сила сопротивления перекатыванию, Н / Power of the rolling resistance, Н |
Подача на нож S , м / Submission on knife S, m |
Твердость почвы p , МПа / Hardness soil p , MPa |
||||
|
0,25 |
0,60 |
0,95 |
1,30 |
1,65 |
||
|
F стА |
0,03 |
34,4 |
35,1 |
35,9 |
37,1 |
38,4 |
|
0,11 |
34,3 |
35,0 |
35,9 |
37,1 |
38,4 |
|
|
F стВ |
0,03 |
87,7 |
86,0 |
83,9 |
81,2 |
77,8 |
|
0,11 |
87,8 |
86,3 |
83,9 |
81,2 |
77,8 |
|
По данным табл. 1 построим графики изменения сил сопротивления перекаты- ванию передних FстА и задних FстB колес экспериментальной тележки (рис. 2).
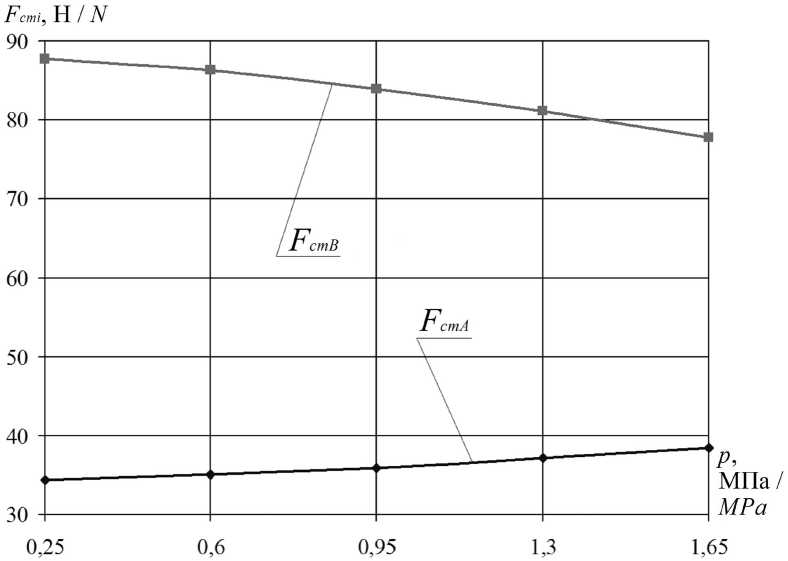
Р и с. 2. Зависимости сил сопротивления перекатыванию передних FстА (1) и задних FстВ (2) колес тележки от твердости почвы p при S = 0,03 м и S = 0,11 м
Fig. 2. Dependencies rolling resistance force of front FстА (1) and rear FстВ (2) truck wheels from soil hardness at p if m S = 0,03m and S = 0,11m
Для оценки условия устойчивого движения тележки (2) определим значения суммарной силы сопротивления перекатыванию Fст и подталкивающего усилия Fxe. Для этого воспользуемся зависимостями (21) и (4) и условиями, указанными выше: Smin = 0,03 м; Smax = 0,11 м; твердость почвы изменяется в диапазоне от 0,25 до 1,65 МПа. Также для определения силы Fxe учтем особенности плана эксперимента при исследовании АРО (рис. 3) [6; 8; 10].
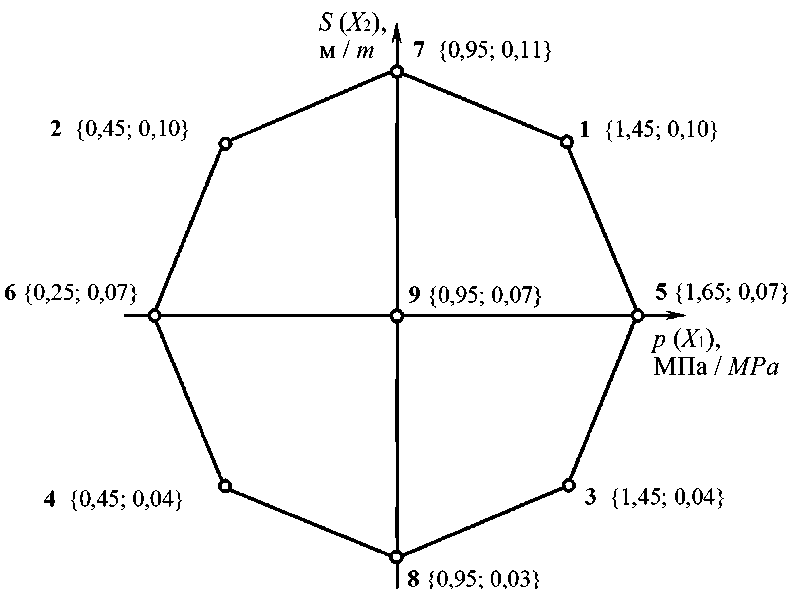
Р и с. 3. План эксперимента в факторном пространстве
F i g. 3. Experimental plan in factor space
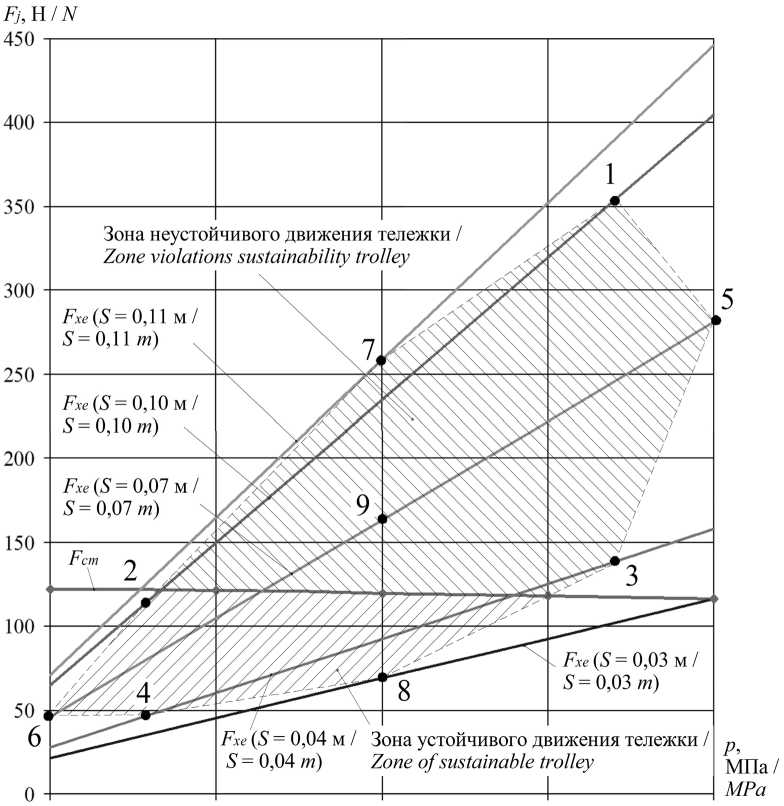
Определение силы Fxe для характерных точек плана позволит более объективно произвести оценку условия устойчивого движения тележки. Результаты расчетов сведем в табл. 2. По результатам табл. 2 построим графики изменения сил Fст и F xe (рис. 4).
Выделим на рис. 4 характерные точки плана эксперимента (1–9). Это позволит получить 2 зоны: 1) лежащую выше графической зависимости силы сопротивления перекатыванию тележки – зону ее неустойчивого движения; 2) лежащую ниже графической зависимости силы сопротивления перекатыванию тележки – зону ее устойчивого движения.
Наличие зоны неустойчивого движения тележки приводит к нарушению условий, задаваемых планом проведения эксперимента, и отрицательно сказывается на качестве и достоверности получаемых результатов.
Т а б л и ц а 2
T a b l e 2
Значения силы сопротивления перекатыванию тележки Fст и подталкивающего усилия АРО F xe
Resistance force Fст values of rolling carts and push force of АРО Fxe
|
Наименование параметра / Parameter name |
Подача на нож S , м / Submission on the knife S , m |
Твердость почвы p , МПа / Hardness soil p , MPa |
||||
|
0,25 |
0,60 |
0,95 |
1,30 |
1,65 |
||
|
Сила сопротивления перекатыванию тележки Fст , Н / The strength of the resistance to rolling carts F ст , N |
0,03 |
121,9 |
121,0 |
119,7 |
118,1 |
116,2 |
|
0,11 |
122,1 |
121,1 |
119,8 |
118,1 |
116,1 |
|
|
Подталкивающее усилие АРО Fxe , Н / Push force АРО F , Н xe , |
0,03 |
21,4 |
45,1 |
68,9 |
92,7 |
116,4 |
|
0,04 |
27,6 |
60,1 |
92,6 |
125,1 |
157,6 |
|
|
0,07 |
46,2 |
105,0 |
163,6 |
222,3 |
281,0 |
|
|
0,10 |
64,9 |
149,8 |
234,7 |
319,4 |
404,5 |
|
|
0,11 |
71,1 |
164,7 |
258,4 |
352,0 |
445,6 |
|
Обсуждение и заключение
Проведенное с учетом особенностей кинематики и силового нагружения исследование позволило выявить определенную зону, где происходит нарушение устойчивости движения тележки существующей эксперимен- тальной установки при испытании АРО почвообрабатывающих машин. Таким образом, необходим поиск конструкторских решений по устранению указанного конструктивного недостатка тележки экспериментальной установки.
0,25
0,6
0,95
1,3
1,65
Р и с. 4. Зависимости силы сопротивления перекатыванию тележки FстВ и подталкивающей силы АРО Fxe от твердости почвы p при S = 0,03 м и S = 0,11 м
F i g. 4. Dependences of resistance to rolling trolleys FстВ and push force АРО Fxe of soil hardness p : S = 0,03 m and S = 0,11 m
Поступила 12.03.2016; принята к публикации 28.04.2016; опубликована онлайн 20.06.2016
256 Технические науки
Submitted 12.03.2016; accepted for publication 28.04.2016; published online 20.06.2016
Список литературы Исследование устойчивости движения подвижного модуля экспериментальной установки при испытании активных ротационных рабочих органов почвообрабатывающих машин
- Купряшкин В. Ф. Устойчивость движения и эффективное использование самоходных почвообрабатышающих фрез. Теория и эксперимент. Саранск: Изд-во Мордов. ун-та, 2014. 140 с.
- Чаткин М Н Кинематика и динамика ротационных почвообрабатышающих машин. Саранск: Изд-во Мордов. ун-та, 2008. 316 с. URL: http://primo.nlr.ru/primo_library/libweb/action/dlDisplay. do?vid=07NLR_VU1&docId=07NLR_LMS001270379&fromSitemap=1&afterPDS=true.
- Динамические условия обеспечения равномерного движения самоходных малогабаритных почвообрабатышающих фрез с ходовыми колесами/В. Ф. Купряшкин //Нива Поволжья. 2011. № 4. С. 52-56. URL: http://niva-volga.ru/index.php?id=020101.
- Ящерицы! I П. И., Махаринский Е. И. Планирование эксперимента в машиностроении. Минск: Выпгойш. шк., 1985. 286 с.
- Выбор кинематических характеристик стенда для исследования почвообрабатывающих фрез/В. Ф. Купряшкин //Тракторы и сельхозмашины. 2012. № 10. С. 26-27. URL: http://www.tismash.ru/archives/8035.
- Методика проведения стендовых испытаний самоходных почвообрабатывающих машин с активными рабочими органами/В. Ф. Купряшкин //Повышение эффективности функционирования механических и энергетических систем: мат-лы Всерос. науч.-техн. конф. Саранск: Изд-во Мордов. ун-та, 2009. С. 385-389.
- Андреев В. И. Исследования динамических процессов ротационных почвообрабатывающих машин: автореф. дис.. канд. техн. наук. М., 1972. 28 с.
- Купряшкин В. Ф. Обоснование факторного пространства исследования активных рабочих органов самоходных почвообрабатывающих фрез (на примере фрезы ФС-0,85)//Повышение эффективности функционирования механических и энергетических систем: мат-лы Всерос. науч.-техн. конф. Саранск: Изд-во Мордов. ун-та. 2009. С. 391-394.
- Синеоков Г. Н., Панов И. М Теория и расчет почвообрабатышающих машин. М.: Машиностроение, 1977. 328 с.
- Купряшкин В. Ф. Повышение эффективности функционирования самоходной малогабаритной почвообрабатывающей фрезы оптимизацией конструктивно-технологических параметров (на примере фрезы ФС-0,85): дис.. канд. техн. наук. Саранск. 2011. 220 с. URL: http://tekhnosfera.com/povyshenie-effek-livnosti-funklsionirovaniya-samohodnoy-malogabariloy-pochvoobrabalyvayuschey-frezy-oplimizatsiey-konstru.
- Силовой анализ устойчивого движения экспериментальной тележки для испытаний рабочих органов самоходных почвообрабатывающих фрез/В. Ф. Купряшкин //Теория машин и рабочих процессов: сб. тр. междунар. науч.-практ. конф. Бишкек: Ин-т. Маш., 2013. С. 122-126.
- Анализ устойчивости хода экспериментальной тележки испытательного стенда для исследования почвообрабатышающих машин с фрезерными рабочими органами/В. Ф. Купряшкин //Энергоэффективные и ресурсосберегающие технологии и системы: межвуз. сб. науч. тр. Саранск: Изд-во Мордов. ун-та. 2010. С. 372-378.
- Александров М П. Грузоподъемные машины. М.: Изд-во МГТУ им. Н. Э. Баумана; Высш. шк., 2000. 552 с.
