Итеративный алгоритм восстановления трехмерной формы объекта

Автор: Котляр В.В., Залялов О.К.
Журнал: Компьютерная оптика @computer-optics
Рубрика: Лазерные системы
Статья в выпуске: 16, 1996 года.
Бесплатный доступ
Предложено применение комбинированного итеративного метода восстановления фазы по интерферограмме к восстановлению рельефа трехмерных объектов по их изображению в структурном освещении. Получены результаты восстановления модельных изображений.
Короткий адрес: https://sciup.org/14058333
IDR: 14058333
Текст научной статьи Итеративный алгоритм восстановления трехмерной формы объекта
Автоматическое измерение формы объектов, геометрии поверхности, уровня кривизны или степени шероховатости - все это очень важно в задачах бесконтактной диагностики, машинного зрения, трехмерного моделирования и стереокопирования.
Известны, например оптико-цифровые устройства для построения стереокопии трехмерных объектов: Hyscan фирмы Hymarc Ltd., Канада; 3Dsystem фирмы Newport Instruments AG, Швейцария. Подобные устройства способны в течение 2-3 секунд построить цифровую копию формы объекта размером около 200x200x200 мм с разрешением 0.05 мм. Компьютеру в этих системах отводится задача обработки структурированного изображения типа интерферограммы, состоящего из набора темных и светлых полос. Известен ряд математических методов, использующихся для восстановления трехмерной формы объектов по их двумерному структурированному изображению: муаровая топография [4]; сдвиговая муаровая топография [5]; Фурье профи-лометрия [6]; фазовая профилометрия [7]. Эти мето- ды во многом совпадают с методами обработки обычных интерферограмм: методом преобразования Фурье [8] и методом выделения центров полос [9].
Основной недостаток этих методов в том, что с увеличением уровня шума в обрабатываемом изображении и при большом числе разрывов полос из-за спекл-эффекта они теряют надежность и могут приводить к большим ошибкам при измерении трехмерной формы объекта. Этот недостаток ограничивает область применения интерферометров и трехмерных сенсоров гладкими поверхностями.
Однако различные методы обработки интерферограмм с ростом шума данных деградируют по-разному. Методы, основанные на анализе пространственного спектра изображения, позволяют эффективно разделять шум и полезный сигнал в частотной плоскости. С другой стороны, ограничение фильтрующим окном спектра изображения ведет к потере части пространственных частот и к уменьшению разрешения функции поверхности.
Компромисс между фильтрацией шума в изображении и сохранением пространственного разре- шения ищут с помощью подходящего выбора формы окна. Например, используют окно Ханнинга [10].
Но выбор формы фильтрующего окна - это полумера. Известно, что увеличить разрешение измерительной системы, восстанавливающей изображение по малому участку пространственного спектра можно с помощью специального итеративного алгоритма Герчберга [11]. Также известно, что оптимальным образом стабилизировать работу системы в присутствии шумов данных можно с помощью универсального метода регуляризации [12].
В связи с этим актуальной является разработка оптимальных итеративных методов, алгоритмов и программного обеспечения для обработки структурированных изображений типа интерферограмм, обеспечивающих устойчивую в присутствии шума данных работу оптико-цифровых систем для автоматического измерения трехмерной формы объекта [13].
Оригинальность данной работы в том, что впервые для задач восстановления формы объекта по его структурированному изображению применены оптимальные итеративные алгоритмы с регуляризацией. Эти алгоритмы позволяют эффективно восстанавливать полную информацию об истинном спектре изображения по его известной части в присутствии шума.
Одно из преимуществ предложенного подхода заключается в том, что разрабатываемое программное обеспечение с минимальной модернизацией применимо для обработки обычных классических интерферограмм в лазерных интерферометрах.
Практическая значимость разработанного метода в том, что он способен существенно ослабить ограничения на уровень шума в оптических системах диагностики поверхности и восстановления формы объектов. Как правило, алгоритмы с регуляризацией позволяют успешно обрабатывать интерферограммы с отношением сигнал/шум равным единице и ниже. При таком уровне шума данных стандартное программное обеспечение для обработки интерферограмм, основанное на выделении центров полос, не работает.
-
2. Схема наблюдения
Схема получения структурированного изображения показана на рис. 1. На объект проецируются под углом а параллельные световые полосы с синусоидальным распределением амплитуды g ( x’ , y’ ):
g(x',y') = A(1 + cos©x'). (1)
Получаемое в результате распределение амплитуды света на объекте
f (x, У ) = g (x ', У ') = g (x cos a + h (x, y )sin a, y) = , (2) A(1 + cos[to(x cos a + h(x, y) sin a)])
где h(x,y) - функция рельефа в области [xmin,xmax]([ymin,ymax], регистрируется с помощью телекамеры, ось которой перпендикулярна объектной плоскости z=0 (рис. 1.) и получается дискретное изображение f (n ) = 1 +
- exp i ©I x m in
cos a +— n cos a + h ( n ) sin a N
+ 1 exP
I AC^
-i©^xmin cos a +—n cos a + h(n) sin a где A=xmax-xmin, N - число отсчетов в строке изображения.
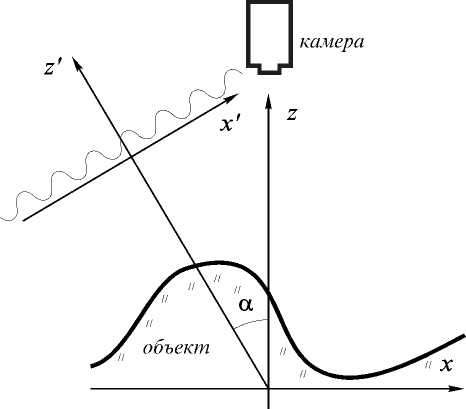
Рис. 1 Оптическая схема наблюдения
Таким образом, задача восстановления рельефа по изображению объекта в структурном освещении с точностью до постоянных коэффициентов совпадает с задачей восстановления распределения фазы по интерферограмме [13]. Действительно, спектр функции f ( n ) представляет собой функцию вида
F(m) = 5(m) + G(m - vA cos a) + G *( m + vA cos a), (4)
где
G ( m ) =
1 e 2 nv x min cos a F L i 2 nv h ( n ) sin a
2 {
где обозначает дискретное преобразование Фурье.
Тогда функцию поверхности можно рассчитать по формуле:
arg F {G (m)} + 2n k (n)
h (n) =---------------------------
2n sin a
.
где k ( n ) - функция принимающая целые значения. Она возникает вследствие периодичности фазы.
-
3. Алгоритм восстановления
Функция
G(m) = F(m + vA cos a) W(m),
полученная методом Фурье-профилометрии, где W ( m ) - функция фильтрующего окна, в качестве которой могут быть использованы, например, функция прямоугольного импульса, или окно Ханнинга, используется в качестве первого приближения для итерационного алгоритма восстановления рельефа. Мы использовали модифицированный итерационный алгоритм Гершберга-Папулиса [11,13].
На к -м шаге в частотной области вычисляется оценка спектра функции рельефа
[S(m), m е D
Gk = i
I Fk(m), m t D
где D - область окна W ( m ),
S ( m ) = I G ( m ) , [ 0,
m е D m t D
фундаментальная составляющая спектра, выделенная в результате применения Фурье-профилометрии, Fk ( m )=7{ f _1 ( n )} - результат применения преобразования Фурье к ( к -1)-й оценке распределения рельефа в объектной области
После применения к ней преобразования Фурье, мы получаем к -е приближение рельефа - комплексную функцию fk ( n )=7-1{ Gk ( m )}, фаза которой и представляет собой искомый рельеф.
Далее заменяем ее на функцию с таким же распределением фазы, но с постоянной амплитудой и переходим к следующему шагу итерации.
В присутствии шумов для регуляризации процесса мы используем мультипликативную регуляризацию [13]. В этом случае вместо функции спектра S ( х ) используется функция
7\
S ( 6 ) =
IS(6)12 S(6)
IS(6)12+в-||6| I2,
где в - постоянная регуляризации, или аддитивную регуляризацию, при которой вместо спектра F k ( x ) используется
F к ( 6 ) = (1 - a ) . [ 1 - D ( 6 ) ] ■ F k ( 6 ) + D ( 6 ) ■ S ( 6 ) ,(11)
где a - постоянная регуляризации,

6е D
6t D .
-
4. Построение модельного изображения
Для исследования работы алгоритма нами было произведено моделирование получения изображения объекта в структурном освещении по заданной функции рельефа h ( х , y ) и параметрам проецирующей решетки - частоте v и углу наклона a .
Для этого в соответствии с (2) для каждого пиксела вычисляется его уровень освещенности. Но поскольку модель (2) не учитывает возможность затенения части изображения, для учета этой возможности предлагается следующая процедура.
Заполнение изображения производится в направлении возрастания х’ вдоль оси х. Для каждой точки (x,y) вычисляется значение x’ по формуле поворота х' = х cos a + h (х, y) sin a (12)
если это значение больше ранее запомненного максимального x’max , то точка освещена, иначе затенена. Если точка освещена, то ее координата х’ запоминается в качестве нового значения х’^ .
После заполнения изображения по заданному отношению сигнал/шум генерируется шум с нормальным или равномерным распределением.
Таким образом были получены модельные изо-
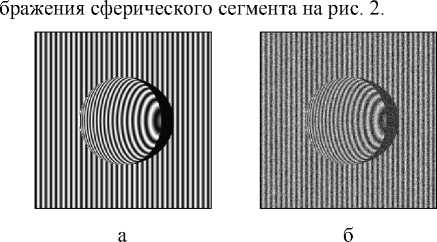
Рис. 2 Модельные изображения без шума (а) и с шумом (б) отношение сигнал/шум - 1.
-
5. Численные результаты
В результате обработки изображений на рис. 2 были получены результаты, показанные на рис. 3, соответственно.
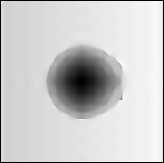
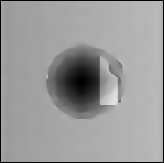
а б
Рис. 3 Восстановленный рельеф для изображений, приведенных на Рис. 2
Следует отметить, что сдвиг частоты vA cos 9 может оказаться не кратным шагу дискретизации, и тогда возникает наклон восстановленного рельефа по отношению к исходному.
При восстановлении рельефа важной частью алгоритма становится разворачивание фазы для получения рельефа. Мы применяли простую построчную процедуру, которая не справилась с разворачиванием фазы в случае присутствия шумов.
На восстановленных изображениях можно заметить, что затененные участки поднимаются до
“поверхности тени”, то есть область геометрической тени прибавляется к объекту.
-
6. Литература
-
[1] Aerospace America, 1990, no. 1, p. 40-41
-
[2] T. Nouri “Three-dimensional scanner based on fringe projection” Opt. Eng., 1995, v. 34, No. 7, p. 1961-1963
-
[3] E. M¿ller “Fast three-dimensional form measurement system” Opt. Eng., 1995, v. 34, No. 9, p. 2754-2756
-
[4] U. Takasaki “Generation of surface contours by moire patterns” Appl. Opt., 1970, v. 9, no. 4, p. 942-947
-
[5] A. Asundi, K. U. Yung “Phase shifting and logical moire” J. Opt. Soc Am. A, 1991, v. 8, no. 10, p. 1591-1600
-
[6] M. Takeda, K. Mutoh “Fourier transform profilome-try for the automatic measurement 3D object shapes” Appl. Opt., 1983, v. 22, no. 24, p. 3977-3982.
-
[7] V. Srinivasan, H.C. Lu, M. Haliona, “Automated phase-measuring profilometry of 3D diffuse object” Appl. Opt., 1984, v. 23, no. 18, p. 3105-3108
-
[8] Takeda M., H. Ina, S. Kabayashi “Fourier transform method of fringe pattern analysis for Computer-based topography and interferometry” J. Opt. Soc. Am. 1982, v. 72, no. 1, p. 156-160.
-
[9] T. Yatagai, S. Nakadata, M. Idesawa, H. Saito “Automatic fringe analysis using digital image processing techniques” Opt. Eng., 1982, v. 21, n. 2, p. 432-435.
-
[10] J. Liu, X. Su “Two-dimensional Fourier transform profilometry for the automatic measurement of three-dimensional object shapes” Opt. Eng. 1995, v. 34, no. 11, p. 3297-3302.
-
[11] R. W. Gerchberg “Superresolution through error energy reduction. Opt. Acta, 1974, v. 21, p. 709-720.
-
[12] A. N. Tikonov, V. Y. Arsenin, Solution of Ill-Posed Problems, Winston, Washington DC (1977)
-
[13] V. V. Kotlyar, P.G. Serafimovich, O.K. Zalyalov “Noise-insensitive iterative method for interferogram processing” Opt. and Laser Technology, 1995, vol. 27, No 4, p. 251-254.
-
В. В. Котляр, О. К. Залялов
ИТЕРАТИВНЫЙ АЛГОРИТМ ВОССТАНОВЛЕНИџЯ ТРЕХМЕРНОЙ ФОРМЫ ОБЪЕКТА.
