Измерение параметров магнитного поля и анализ возмущений на борту малых космических аппаратов "Аист"

Автор: Смкин Н.Д., Сазонов В.В., Воронов К.Е., Пияков А.В., Дорофеев А.С., Ильин А.Б., Пузин Ю.Я., Видманов А.С.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 4 т.18, 2015 года.
Бесплатный доступ
Представлено описание экспериментов, проводимых с помощью аппаратуры «МАГКОМ», установленной на борту малых космических аппаратов типа «Аист», которая предназначена для измерения магнитного поля Земли посредством двух трехкомпонентных магнитометров, а также для компенсации возникающих в полете угловых возмущений посредством использования трех ортогонально расположенных электромагнитов. Данные измерений геомагнитного поля передаются в составе программно-телеметрической информации на Землю, где обрабатываются в целях реконструкции параметров вращательного движения космического аппарата, определения условий освещенности Солнцем датчиков другой научной аппаратуры и расчета величины бортовых остаточных возмущений.
Малый космический аппарат, магнитометр, измерение магнитного поля
Короткий адрес: https://sciup.org/140255945
IDR: 140255945
Magnetic field measurments at small spacecraft "Aist"
The description of the experiments conducted using the equipment «MAGCOM» installed on board the spacecraft small type «Aist», which is designed to measure the Earth’s magnetic field by means of two ternary magnetometers, as well as for compensation arising in flight angular perturbations using three orthogonally arranged solenoids. The measurements of the geomagnetic field are transmitted as part of software and telemetry data to Earth, where they are processed for the purpose of reconstruction of the parameters of the rotational motion of the spacecraft, certain lighting conditions Sun sensors and other scientific instruments on board the calculation of the value of the residual disturbances.
Текст научной статьи Измерение параметров магнитного поля и анализ возмущений на борту малых космических аппаратов "Аист"
Малый космический аппарат (МКА) «Аист» (летный образец) был выведен на орбиту 21 апреля 2013 года путем отделения его от КА «Бион-М» № 1, функционирующего на околокруговой орбите высотой около 570 км и наклонением 64.9 ° . Технологический образец МКА «Аист» был выведен на орбиту 28 декабря 2013 года путем отделения его от блока выведения «Волга» на орбиту с параметрами: высота в перигее 602.3 км, в апогее 633.6 км, наклонение плоскости орбиты 82.4 ° , период обращения 96.9 минуты. Установленная на борту МКА научная аппаратура (НА) «МАГ-КОМ» и «МЕТЕОР» разработана и изготовлена институтом космического приборостроения СГАУ.
В период полета НА «МЕТЕОР» производит регистрацию высокоскоростных механических частиц естественного и искусственного происхождения и измеряет параметры электризации элементов конструкций МКА. Данные измерений передаются в НА «МАГКОМ». Аппаратура «МАГКОМ» по командам управления с Земли производит измерение параметров магнитного поля Земли, включает ортогональную систему электромагнитов для компенсации угловых возмущений, формирует и передает программнотелеметрическую информацию с данными из- мерений от датчиков НА в бортовую команднонавигационную систему МКА, которая по радиоканалу обеспечивает передачу информации на наземные средства управления.
Обработка поступающей от МКА программнотелеметрической информации производится наземными средствами управления СГАУ.
В данной статье представлены основные особенности технической реализации аппаратуры «МАГКОМ» в части измерений вектора магнитной индукции (ВМИ) геомагнитного поля, по данным которых решается ряд следующих задач: контроль помеховой и магнитной обстановки на борту спутника [1; 2]; реконструкция параметров углового движения МКА в условиях неориентированного орбитального полета [3; 4]; определение условий освещенности Солнцем и расчет величины возмущений, действующих на МКА в низкочастотной части спектра (от 0 до 0,01 Гц.).
1. Состав и описание аппаратуры «МАГКОМ»
Научная аппаратура «МАГКОМ» состоит из блока электроники (БЭ), двух трехкомпонентных магнитометров (ДМ № 1 и ДМ № 2), блока управления электромагнитами (БУЭМ) и трех
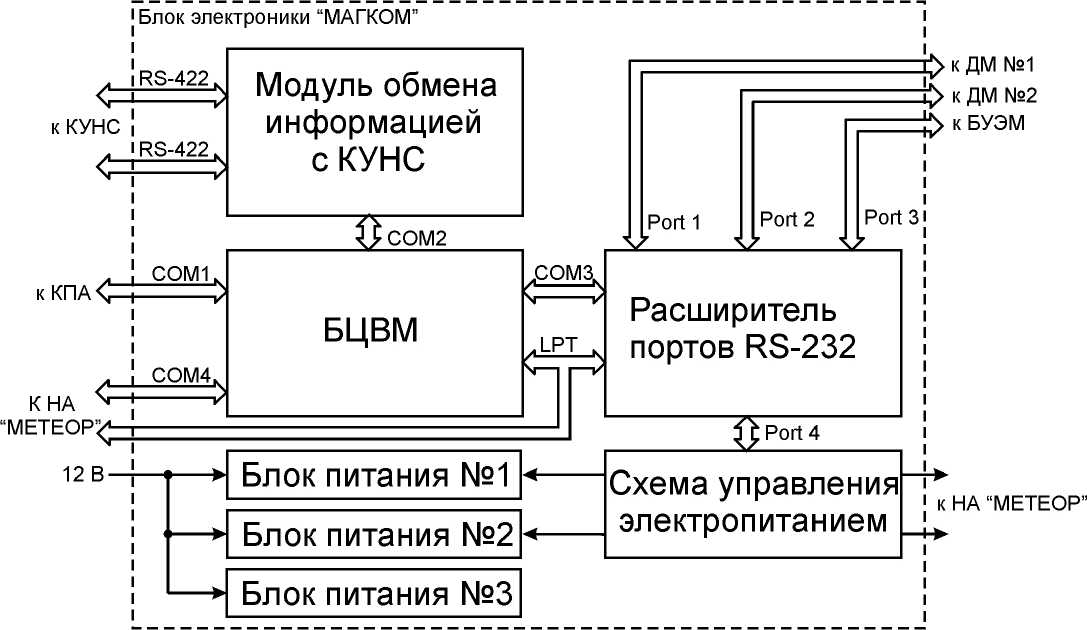
Рис. 1. Функциональная схема БЭ «МАГКОМ»
ортогонально расположенных электромагнитов (ЭМ-X, ЭМ-Y, ЭМ-Z).
На рис. 1 приведена структурная схема блока электроники «МАГКОМ».
В качестве бортовой вычислительной центральной машины (БЦВМ) в блоке электроники «МАГКОМ» используется одноплатный компьютер VSX-104 Канадской фирмы Tri-M. Данный компьютер построен на x86-совместимом процессоре Vortex-104 с управляемой тактовой частотой от 66 до 300 МГц, имеет 128 мегабайт оперативной памяти и 4 последовательных порта стандарта RS-232. Для хранения телеметрической информации, рабочих программ и оперативной системы используется Compact Flash размером 4 гигабайта.
Для обеспечения подключения к БЦВМ двух датчиков-магнитометров, контрольно-поверочной аппаратуры (КПА), блока управления электромагнитами, связи с командно-управляющей навигационной системой (КУНС) и т. д. имеющихся последовательных портов недостаточно. Для расширения существующих портов используется специально спроектированный для этого расширитель портов RS-232, который фактически представляет собой коммутатор. Использование стандартных расширителей портов было отвергнуто на этапе эскизного проектирования ввиду их большого энергопотребления (более 1 Вт у самого экономичного варианта). Схема управления электропитанием построена на микроконтроллере ATmega 88. Она принимает по последовательному порту сигналы управления от БЦВМ и формирует на своем выходе логи- ческие уровни, по которым включаются источники питания. В БЭ «МАГКОМ» имеются 3 источника питания: блок питания № 1 формирует напряжение +6 В для питания магнитометров; блок питания № 2 формирует напряжение +5 В для питания блока управления электромагнитами и блок питания № 3 (включен постоянно, как только на блок электроники «МАГКОМ» подается напряжение бортовой сети +12 В) формирует +5 В для питания БЦВМ, расширителя портов RS-232, схемы управления электропитанием и модуля обмена информацией с КУНС. В качестве коммутаторов использованы микросхемы 74HC125D, драйверы RS-232 – MAX3232, ключи собраны на транзисторах BC817 по схеме с открытым коллектором. Для выбора требуемого порта используются дешифратор 74HC138 и регистр-защелка 7HC273.
Модуль обмена информацией с КУНС построен на базе микроконтроллера ATmega 680 и с лужит для связи с командно-управляющей навигационной системой малого космического аппарата «Аист». Модуль работает в режиме приема передачи потоков информации в соответствии с протоколом обмена информацией с КУНС.
Блок управления электромагнитами (БУЭМ) осуществляет формирование контролируемого значения тока по трем каналам для питания исполнительных устройств – электромагнитов. Принцип действия БУЭМ основан на управлении скважностью сигнала постоянной амплитуды 5 В с применением широтно-импульсной модуляции. В режиме измерения вектора магнитной индукции данный блок выключен и не функционирует.
2. Датчик магнитного поля
Датчик магнитного поля конструктивно разделен на две составные части – ячейка А1 (датчики магнитного поля, система измерения и формирования тестового сигнала) и ячейка А2 (система питания и информационного согласования датчика магнитного поля), которые соединены между собой межплатным штыревым разъемом. Через этот разъем осуществляется подача питания и обмен данными между ячейками А1 и А2. Ячейки устанавливаются одна над другой, чтобы уменьшить габаритные размеры датчика. Функциональная схема датчика приведена на рис. 2.
В качестве магнитных датчиков используются одно- и двухкомпонентные магнитные сенсоры HMC1021Z и HMC1022Z компании Honeywell International Inc [5].
Дифференциальные напряжения с выходных цепей датчиков магнитного поля X, Y, Z через коммутатор последовательно подключаются ко входу инструментального усилителя. Коэффициент усиления усилителя равен 200 и определяется диапазоном измеряемых значений индукции магнитного поля, т. е., с одной стороны, чувствительностью датчиков магнитного поля, с другой – максимальным измеряемым значением индукции магнитного поля. Напряжение с выхода усилителя подается на вход быстродействующего АЦП. Оцифрованный сигнал – значение уровня магнитного поля по каждой из составляющих – считывается микроконтроллером. По запросу результаты измерения выдаются через последовательный интерфейс с протоколами RS 232 или RS 485.
Ко входу АЦП подключен датчик температуры, с помощью которого производится измерение температуры внутри датчика. Информация о температуре необходима для учета температурного влияния на результаты измерения и последующей коррекции.
Драйвер и управляемый мост используются для формирования сигнала Set (установки)/
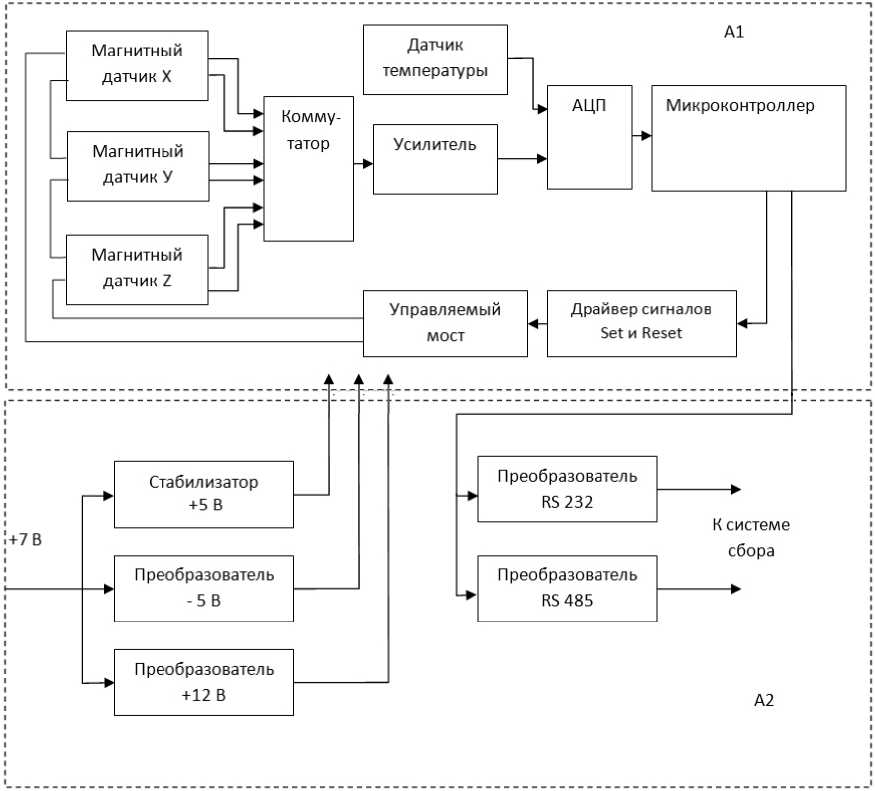
Рис. 2. Функциональная схема датчика магнитного поля
Reset (сброса), необходимого для нормальной работы датчиков магнитного поля. Микроконтроллер по двум цепям управления формирует импульсы длительностью 1–2 мкс, которые поступают на драйвер. Драйвер производит формирование импульсов тока амплитудой 0.5–4 А такой же длительностью прямой и обратной полярности. Временной интервал между импульсами тока определяется режимом работы датчика магнитного поля.
Микроконтроллер программируется внутри-схемно с помощью программатора, подключаемого к технологическому разъему на ячейке А1.
Преобразователи формируют требуемое для работы модулей напряжения питание. Дополнительно установлены источники опорного напряжения для формирования опорных потенциалов.
Информация о магнитном поле по каждой составляющей в виде измеренного напряжения, о температуре и некоторая служебная информация в виде пакетов данных определенного размера передается по последовательному каналу связи в блок электроники. Для обмена возможно использование обычного протокола RS 232 или помехоустойчивого RS 485. Переключение осуществляется перемычками на ячейке А2. С точки зрения протокола обмена датчик магнитного поля является пассивным устройством, т. е. работает в режиме «ведомый». Запрос на измерение инициируется блоком электроники.
Перед установкой на космический аппарат каждый датчик калибруется и строится калибровочная характеристика. Для калибровки магнитного датчика используется катушка длиной 0,3 м и диаметром 0,15 м. Максимальная индукция магнитного поля, создаваемая катушкой, должна быть не менее границ диапазона измерений датчика. Для датчиков-магнитометров, входящих в научную аппаратуру «МАГКОМ», максимальное значение индукции магнитного поля, создаваемого катушкой, должно быть не менее 200 мкТл. Расчет катушки выполнялся по формуле
B = µ a Iwl , (1) где µ a – абсолютная магнитная проницаемость (для воздуха равна 4 π ⋅ 10 - 7 Гн/м); I – ток, протекающий через катушку; w – количество витков; l – длина катушки, м.
Для намотки катушки использовался медный провод диаметром 1 мм. Катушка содержала 300 витков и имела длину 0,3 м. Внутри катуш- ки на немагнитных подставках размещался датчик-магнитометр таким образом, чтобы магнитные сенсоры располагались на оси симметрии катушки. Для исключения влияния магнитного поля Земли катушка располагалась таким образом, чтобы ее ось симметрии была направлена перпендикулярно линиям магнитного поля Земли. Для контроля ориентации катушки использовался магнитный компас. Датчик-магнитометр подключался к персональному компьютеру и постоянно измерял магнитное поле. Через катушку пропускался ток, и составлялась зависимость значений кодовых слов с выхода АЦП датчика-магнитометра от пропускаемого через катушку тока. По формуле (1) значения тока пересчитывались в значения индукции магнитного поля, создаваемого катушкой на ее оси, и полученная зависимость интерполировалась линейной функцией. Калибровка производилась для всех трех составляющих магнитного поля. Таким образом, определялись, так называемые, калибровочные функции, которыми определялся перевод измеренных датчиком-магнитометром кодовых слов в значения индукции магнитного поля. Для каждого датчика строились три калибровочные функции.
3. Измерение магнитного поля и реконструкция параметров углового движения МКА
Измерения вектора магнитной индукции геомагнитного поля производятся посредством двух 3-компонентных магнитометров с дискретностью измерений 6 секунд, что определено логикой работы научной аппаратуры «МАГКОМ». Оба магнитометра имеют левую систему координат. Они установлены на противоположных стенках МКА так, что оси OX и OY первого магнитометра соответственно сонаправлены осям OY и OX второго магнитометра, а оси OZ магнитометров противонаправлены друг другу. Данные измерений упаковываются в телеметрический пакет, общий объем которого содержит 2 блока по 4000 измерений магнитного поля, при этом максимальный объем телеметрической информации составляет 8000 измерений, или 13 часов 20 минут полета.
На рис. 3 представлены результаты измерений параметров ВМИ геомагнитного поля вторым магнитометром, установленным на летном образце МКА. Измерение выполнено при вклю-
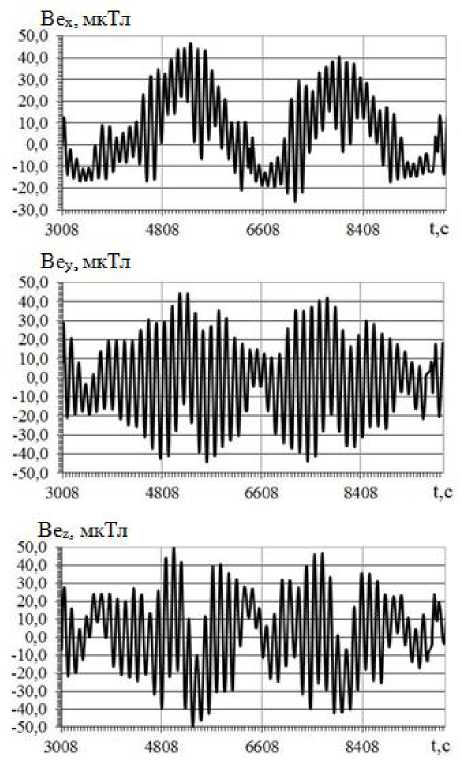
Рис. 3. Данные измерения ВМИ
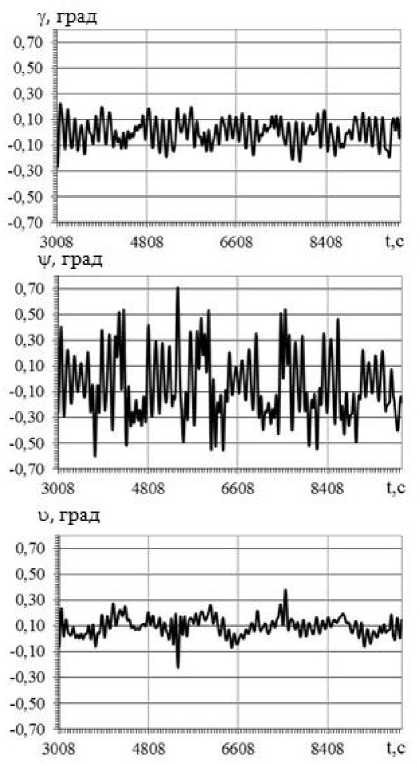
Рис. 4. Параметры угловой ориентации летного МКА
чении аппаратуры «МАГКОМ» в 8 секунд 50 минут 00 часов 27.04.2013 г. Измерения от первого магнитометра имеют аналогичный вид. Анализ полученных измерений ВМИ [4] показал, что они хорошо согласуются с моделью магнитного поля Земли IGRF.
МКА типа «Аист» функционирует в режиме неориентированного орбитального полета. Полученная выборка измерений ВМИ позволяет оценить параметры углового движения МКА и произвести оценку возмущений, действующих на спутник в процессе полета при условии определения данных о движении центра масс МКА по орбите средствами бортовой навигационной аппаратуры.
Угловая скорость космической МКА рассчитывается по данным измерений ВМИ Be на моменты времени t i е [ to , tK ] и на основании формулы Бура:
d' B„ где e – скорость изменения ВМИ относитель-dt но осей ССК, включая и движение МКА относи-e тельно центра масс; Be – абсолютная скорость изменения ВМИ, обусловленная в основном параметрами орбитального движения центра масс МКА. При сглаживании выборки измерений toi тригонометрическим рядом Фурье численным методом рассчитываются угловые ускорения
- to,- - to si = — ---—^ и производится реконструкция
-
t i - t i - 1
параметров углового движения МКА с определением зависимости изменения угловой ориентации по каналам CCK: крен ( у i ); тангаж ( 9 i ); рыскание ( v i ). Зависимость изменения параметров угловой ориентации летного МКА, по данным измерений ВМИ от 27.04.2013 г., приведена на рис. 4.
На основе кинематических уравнений движе- toi =
B e х I B e
d ' B e ) dt )
ния вокруг центра масс
B
2 e
to x = Y cos V cos u + V cos Y sin u , to y = \V cos u - Y sin u cos v , to z = u + Y sin V
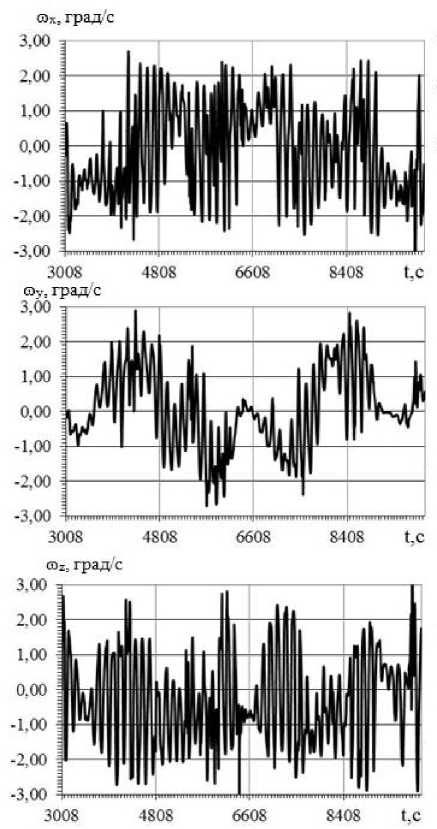
Рис. 5. Угловая скорость МКА
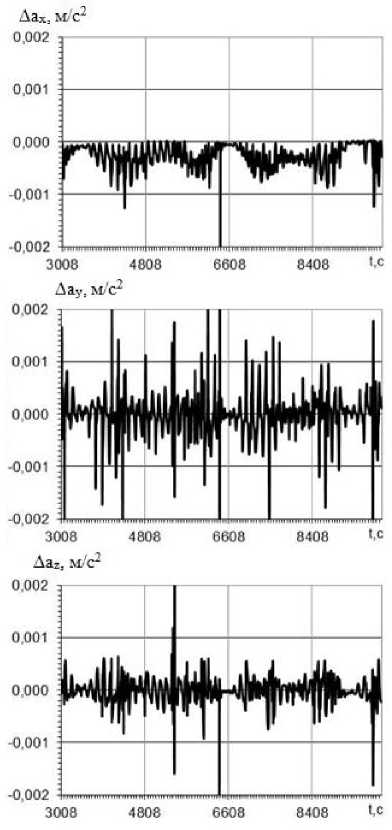
Рис. 6. Возмущения углового характера
МКА производится совместная обработка методом наименьших квадратов, выборки значений угловых скоростей ω i и параметров угловой ориентации МКА γ i , ϑ i , ψ i в целях определения квазиустановившихся значений компонентов угловой скорости вращения ( у i , \^ i , g i ) относительно соответствующих осей Оcxc , Оcyc , Оczc системы координат ССК, связанной с МКА. Подробнее алгоритм определения параметров углового движения МКА «Аист» приводится в [4].
Зависимости изменения компонентов угловой скорости вращения МКА, по данным измерения ВМИ в 8 секунд 50 минут 00 часов 27.04.2013 г., приведены на рис. 5.
Более точное восстановление углового движения МКА «Аист» приводится в [4].
По данным угловой скорости и углового ускорения вычисляется составляющая остаточных квазистатических ускорений Δaω (ρj )=ωi × ×(ωi×ρj)+εi×ρj вращательного характера в заданных точках внутри объектового простран- ства МКА с координатами ρj = [0.5 м, 0, 0]. Зависимости изменения компонентов возмущений углового характера, по данным измерения ВМИ в 8 секунд 50 минут 00 часов 27.04.2013 г., приведены на рис. 6. Из рис. 6 следует, что система компенсации микроускорений МКА «Аист» обеспечивает остаточные микроускорения на уровне 10-4 g, что соответствует расчетным характеристикам системы. Измерения ВМИ посредством 2-х трехкомпонентных датчиков-магнитометров обеспечивает решение задачи определения ориентации МКА в пространстве.
Заключение
Расширение информационных возможностей представленных в работе измерений магнитного поля позволяет выполнить реконструкцию параметров вращательного движения МКА и определения его возмущений с помощью специально разработанного для этого методического подхода. По результатам эксплуатации МКА типа
«Аист» можно сделать следующие основные выводы.
-
1. Результаты измерений индукции магнитного поля на борту двух МКА, функционирующих на разных орбитах, имеют незначительные расхождения и хорошо согласуются с данными модели магнитного поля Земли IGRF. Это свидетельствует о слабом собственном магнитном поле МКА (небольшое увеличение модуля индукции магнитного поля, измеренного вторым датчиком-магнитометром, относительно измерений первого датчика-магнитометра объясняется местом установки датчиков: в непосредственной близости второго датчика-магнитометра находится аккумуляторная батарея, которая имеет собственное постоянное магнитное поле).
-
2. По результатам измерения вектора индукции магнитного поля бортовыми магнитометрами определяются угловые параметры и возмущения, обусловленные движением МКА «Аист» вокруг центра масс.
Список литературы Измерение параметров магнитного поля и анализ возмущений на борту малых космических аппаратов "Аист"
- Магнитометрическая система аппаратуры СПРУТ-VI / Е.А. Грачев [и др.] // Приборы и техника эксперимента. 2004. № 1. С. 127-133.
- Датчиковая аппаратура Штиль-М для проведения экспериментов на космическом аппарате Ресурс-П / Н.Д. Семкин [и др.] // Труды 6-й международной научно-технической конференции «Космонавтика. Радиотехника. Геоинформатика», посвященной 90-летию со дня рождения академика В.Ф. Уткина. Рязань, 2013. С. 93.
- Определение вращательного движения спутника ФОТОН М-2 по данным бортовых измерений магнитного поля Земли / В.И. Абрашкин [и др.] // Препринт Института прикладной механики им. М.В. Келдыша (URL: http://www.keldysh.ru/papers/2005/prep96/FOTON_M2.PDF).
- Определение вращательного движения спутника Аист по данным бортовых измерений магнитного поля Земли / В.И. Абрашкин [и др.] // Препринт ИПМ им. М.В. Келдыша. 2014. № 17. С. 1-38 (URL: http://www.keldysh.ru/papers/2014/prep2014_17.pdf).
- Техническая документация на сенсор магнитного поля. URL: http://aerospace.honeywell.com/~/media/UWSAero/common/documents/myaerospacecatalog-documents/Missiles-Munitions/HMC_1001-1002-1021-1022_Data_Sheet.pdf.
