Измерение с помощью стереофотограмметрии и анализ перемещений в височно-нижнечелюстном суставе

Автор: Меснар М., Баллу А., Кутан Ж.-К., Кид М.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 4 (30) т.9, 2005 года.
Бесплатный доступ
Статья представляет трехмерный метод описания и анализа кинематики височно-нижнечелюстного сустава. Описывается разработанное и примененное оборудование. Представлен экспериментальный протокол, который затем подтвержден путем исследования неточностей измерений. Возможности оборудования лабораторий и, следовательно, применяемых методов позволяют двойное считывание результатов. Анализ движений раскрытия и смыкания челюстей показывает, что перемещения нижней челюсти относительно височной зоны происходят одновременно путем вращения и поступательного движения.
Геометрия, движение раскрытия и смыкания челюстей, кинематика, биомеханическое моделирование, протезирование
Короткий адрес: https://sciup.org/146215843
IDR: 146215843 | УДК: 531/534:
Текст научной статьи Измерение с помощью стереофотограмметрии и анализ перемещений в височно-нижнечелюстном суставе
Биоинженерия может быть определена как применение принципов инженерии для успешного развития медицины и здравоохранения. Применение науки и технологии к решению проблем здравоохранения требует высокой точности при описании процессов физиологии человека. Поэтому основные принципы проектирования, используемые при протезировании суставов, должны быть получены из механической модели изучаемого сустава. Приближение должно быть и квазистатическим (силы, реакции связей) и кинематическим (движение, геометрия), причем эти приближения должны дополнять друг друга [ 1 ] . Настоящее исследование имеет целью разработать модель височно-нижечелюстного сустава, биомеханика которого должна соответствовать реальным физиологическим движениям [ 2 ] .
Первые полные протезы височно-нижнечелюстного сустава [ 3 ] , разработанные Мишеле (1972), включали височную часть из акриловой смолы и металлическую мыщелковую часть, накрученную на внешний кортикальный слой. Титановая чашечка, зависящая от мыщелка, надевалась на верхний край. Штрайкер (1982) покрыл металлическую чашечку полиэтиленовой раскрытой суставной поверхностью. Эта подвижная мыщелковая поверхность предназначалась для того, чтобы создать две фазы движения, которые изучаются в кинематике при описании движения со временем (вращение головки мыщелка в полости суставной ямки до поступательного движения мыщелковой части протеза из этой полости).
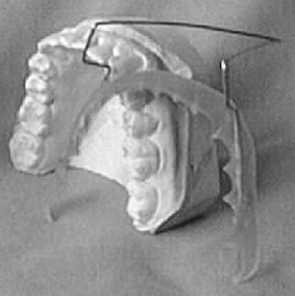
Желоб и нижнечелюстное кольцо
Нижнечелюстная и верхнечелюстная пластины и мишени
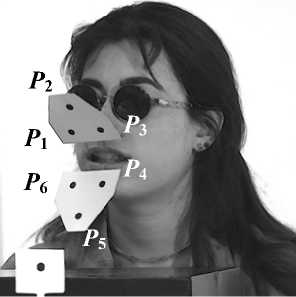
Рис. 1. Желобы, кольца, пластины и мишени на верхней и нижней челюстях
Трехмерный видеоанализ делает возможным изучение трехмерных движений сегментов тела, рассматриваемых как твердые тела. Абдель-Азиз и Карара в работе [ 4 ] разработали методику применения стереофотограмметрии с обычными камерами. Этот метод позволяет определить пространственные траектории точек с использованием последовательных кадров пленки.
Применение этого метода к изучению кинематики височно-нижнечелюстного сустава, представленное в данной работе, позволяет количественно оценить любое перемещение нижней челюсти и системы фиброзно-хрящевых структур относительно черепа. Это позволяет учесть скольжение, которое сопровождает качение при суставном контакте. Скольжение, которое вызывает серьезные патологии, должно учитываться при восстановительном лечении анатомических структур сустава с помощью инженерных методов.
Методы
Метод, развитый Абдель–Азизом и Карара, предполагает применение методов стереофотограмметрии к камерам, внутренние параметры которых неизвестны [ 5 - 7 ] . Алгоритм прямого линейного преобразования позволяет воссоздать пространственные координаты точки из изображений этой точки двумя камерами (или больше, чем двумя). Имеется линейное соотношение между координатами точки на плоской поверхности оцифрованного изображения и координатами, известными в отсчетной системе координат [ 8, 9 ] .
Оборудование
Для изучения височно-нижнечелюстного сустава точки локализации должны быть связаны с верхней и нижней челюстью. Необходимая точность, описывающая кожные области любой локализации, слишком изменчива в сравнении с соседними костными зонами. Исследование костных зон, расположенных у основания черепа, представляет трудности из-за малой величины мыщелка нижней челюсти. Кроме того, использование внутрикортикальных игл вблизи мыщелка является особенно болезненным. Следовательно, две зубные дуги служат как постоянные скелетные системы. Два желоба, зависящие от зубных дуг, были отлиты из метилметакрилата (рис. 1). Когда отливка была закончена, жесткое металлическое защелкивающееся кольцо было вставлено в желоб. Такое кольцо служит для связи пластинки на каждой дуге. Три точки различной локализации были выбраны на пластине верхней челюсти и
Заснятый объект
y

три другие точки были взяты на пластине нижней челюсти. Система отсчета определена с каждым набором трех точек.
Описанное оборудование эксперимента было одобрено двумя лабораториями Университета Бордо, и методика эксперимента добровольно принята двумя волонтерами, студентами – медиками, которые были должным образом информированы и выразили интерес к результатам.
Метод
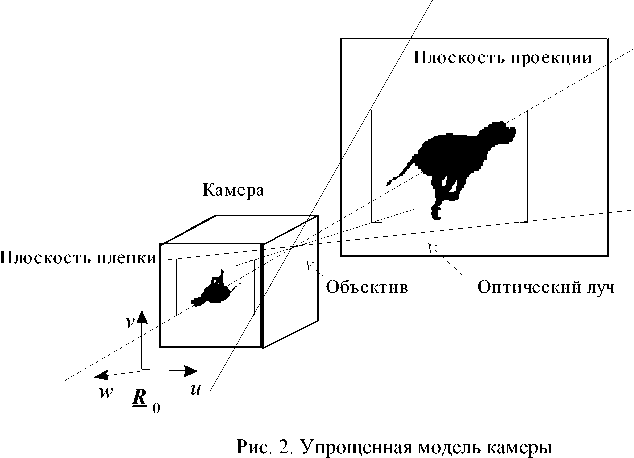
Видеокамера (упрощенная модель) представлена в виде параллелепипеда на рис. 2 с малым отверстием (линза объектива). Свет от объекта, локализованный в области камеры, производит перевернутое изображение в плоскости цифрования после прохождения через отверстие. При проектировании в отсутствие возмущений изображение определяется пересечением лучей света с экраном.
Прямое линейное преобразование помогает получить в плоскости цифрования координаты точки, локализованной в области камеры, в соответствии с ее координатами в отсчетной системе, прикрепленной к объекту. Принцип основан на геометрических соотношениях, разработанных для упрощенной модели камеры (рис. 2). Алгоритм учитывает линейные возмущения относительно двух осей плоскости цифрования изображения и основан на линейной калибровке заснятого объекта. Снимая точку с помощью двух камер, размещенных в двух различных положениях, можно воссоздать пространственные координаты этой точки относительно системы отсчета объекта.
В системе отсчета, связанной с отснятым объемом, x, y и z указывают координаты снятой точки. Собирая постоянные члены, скорректированные координаты U и V точки в отсчетной системе идеальной плоскости проекции имеют следующий вид:
Ax + By + Cz + D Hx + Jy + Kz + L
U =---------------- и V =----------------- . (1)
Ex + Fy + Gz + 1 Ex + Fy + Gz + 1
Для выбранной установки фаза калибровки камеры позволяет определить постоянные значения 11 неизвестных коэффициентов прямого линейного преобразования A, B, C, D, E, F, G, H, J, K и L . Эти параметры изменяются в соответствии с внутренними и внешними параметрами камеры. Необходимо заснять
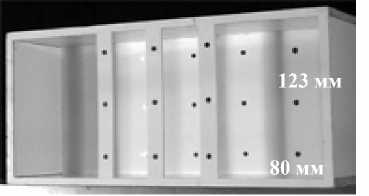
Рис. 3. Калибровочный ящик

Рис. 4. Последовательность операций
(по крайней мере) шесть точек с координатами x, y и z , чтобы отцифровать изображение и измерить соответствующие координаты U и V для каждой точки. Эти шаги приведут затем к системе 12 уравнений с 11 неизвестными коэффициентами.
Калибровочный ящик (рис. 3) имел такие размеры, чтобы калибровать объем, содержащий перемещения головы и верхней челюсти волонтера. Две камеры, используемые в этом эксперименте, были расположены так, чтобы заснять область, включающую весь объем. Чтобы улучшить точность эксперимента, ящик содержал 18 точек отсчета (мишеней), с помощью которых контакты были вычислены. Поэтому восстановление точек было более точным в калибровочном объеме.
Завышенная система из 36 уравнений и 11 неизвестных коэффициентов была затем решена методом наименьших квадратов, что позволило определить 11 констант, характеризующих камеру и оборудование.
Чтобы определить пространственные координаты точек объекта, объект должен быть заснят с помощью по крайней мере двух вышеуказанных калиброванных камер. Для каждой из этих двух камер и их оборудования 11 констант прямого линейного преобразования были известны и обозначены, как A 1 , B 1 , …, L 1 для камеры 1 и A 2 , B 2 , …, L 2 для камеры 2.
В плоскости цифрования камеры 1 (соответственно, камеры 2) координаты точек были обозначены как U 1 и V 1 (соответственно, U 2 и V 2 ). Уравнение (1) позволяет написать систему (2) четырех уравнений с тремя неизвестными коэффициентами:
|
A i — EU 1 |
B i - F i U 1 |
C i - |
G i U i |
U i |
- D i |
|||||
|
H 1 |
— EV i |
J i - |
F 1 V 1 |
K 1 |
- GV |
x |
V |
- L i |
||
|
A 2 |
- E 2 U 2 |
B 2 |
— F 2 U 2 |
C 2 |
- G 2 U 2 |
‘ |
y |
= |
U 2 |
- D2 |
|
H 2 |
— E 2 V 2 |
J2 |
- F 2 V 2 |
K 2 |
— G 2 V 2 _ |
_ z _ |
_ V 2 |
- L L 2 |
||
Решение системы также производится методом наименьших квадратов, что позволяет определить пространственные координаты снятой точки. Этот метод применяли к каждому кадру пленки, чтобы воссоздать траекторию точки. Некоторые фазы (рис. 4) затем требуются для анализа относительных перемещений (нижняя челюсть - череп) [ 10 ] .
После определения координат мишеней (рис. 1) в плоскости верхней челюсти (точки P 1 , P 2 и P 3 ) и в плоскости нижней челюсти (точки P 4 , P 5 и P 6 ) возможно вычислить перемещение центра височно-нижнечелюстного сустава. Точки C 1 и C 2 указывают центры двух мыщелков. Середина сегмента C 1 C 2 обозначена как С (рис. 5).
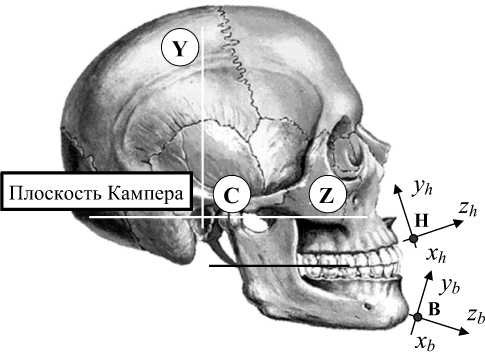
Рис. 5. Отсчетные системы
Отсчетная система Rh ( H bh ) относится к плоскости верхней челюсти (рис. 5). Точка H представляет центр тяжести точек P 1 , P 2 , P 3 . Отсчетная система Rb ( B bb ) относится к плоскости нижней челюсти. Точка В представляет центр тяжести точек P 4 , P 5 , P 6 .
В начальный момент времени (бугорково-фиссурный контакт зубов антагонистов) точка С , относящаяся к нижней челюсти, занимает положение С 0 в пространстве височной кости. Вектор C 0 C представляет перемещение точки С в
>
> >
>
течение всего наблюдения. В выражении C 0 C = C 0 H + HB + BC векторы C 0 H и BC остаются постоянными, соответственно, в системах отсчета Rh ( H bh ) и Rb ( B bb ) . Компоненты векторов C 0 H и BC могут быть определены путем морфологического отображения волонтеров. В начальный момент векторы BC и BC 0 соединены. Вектор BC 0 может быть выражен на основе b h и преобразования на основе b b .
Регистрация и производство данных было получено с помощью компьютера. После фотографирования двумя S - VHS камерами полученное изображение проводилось с помощью программ для видеоансамбля. Затем определение мишеней проводилось с программой производства изображений. Первое применение [ 9 ] обеспечило определение констант прямого линейного преобразования путем решения системы (2). После этого второе применение обеспечило определение координат мишени (точки P 1 - P 6 ), представленных на двух пластинах. Эти координаты были зарегистрированы и проанализированы с помощью программы, которая позволила вычислить и представить эволюцию точек, указанных в разделе результатов.
Выбор двух волонтеров
Два волонтера были отобраны для эксперимента. Это были две девушки (субъект 1, Лаура) в возрасте 26 лет и (субъект 2, Синди) в возрасте 28 лет. Они не подвергались ортодонтическому лечению, возможному для модификации их мышечной физиологии и суставных морфологических параметров в фазе роста. У них было полное прорезывание зубов без патологии суставов или зубных протезов. Эти два субъекта имели среднее развитие. Плоскость окклюзии и плоскость Кампера были параллельны.
-2 6 14 22
z h (мм)
-2
-5
h
-5
6 14 22
z h (мм)
-20
-20
-35
Лаура – волонтёр 1
-35
-50
-50
Синди – волонтёр 2
-65
-65
-80 y h (мм)
-95

-80
y h (мм)
-95
Рис. 6. Перемещение точки В в сагиттальной плоскости при раскрытии и смыкании челюстей
Результаты
Рис. 5 показывает обозначения и параметры, используемые для описания и анализа результатов. Результаты, связанные с движениями раскрытия и смыкания челюстей, представлены для подтверждения метода.
Движения раскрытия и смыкания челюстей
Движения раскрытия и смыкания челюстей были изучены от максимального бугорково-фиссурного контакта зубов антагонистов до квази-максимального открытия между резцами.
Запись перемещений точки B (рис. 6) показывает различные амплитуды максимального раскрытия у субъектов 1 и 2. При заданном времени наблюдения субъекты 1 и 2 обнаружили почти одинаковую максимальную амплитуду раскрытия. Поэтому различие не имеет физиологического обоснования. Субъект 1 не достиг максимального раскрытия полости рта в течение наблюдения.
В то же время перемещение точки С (центр височно-нижнечелюстного сустава) близки к 10 мм у субъекта 1 и около 22 мм у субъекта 2 (рис. 7). Из этого положения точки С вращательное движение (рис. 8) делает возможность увеличить амплитуду раскрытия.
Для перемещения точки С , которое равно примерно 20 мм, субъект 2 имеет раскрытие 22 ° . С этой точки зрения, движение нижней челюсти относительно височной зоны сопровождалось очень малым дополнительным перемещением точки С (рис. 8). Первые две трети раскрытия (примерно 22 ° ) соответствуют комбинации вращения и поступательного движения. Последняя треть (примерно 11 ° ) соответствует квазичистому вращению вокруг оси, близкой к C 1 C 2 . Следовательно, это дополнительное движение проводится без значительного перемещения точки С и фиброзно-хрящевой структуры (около 3 мм).
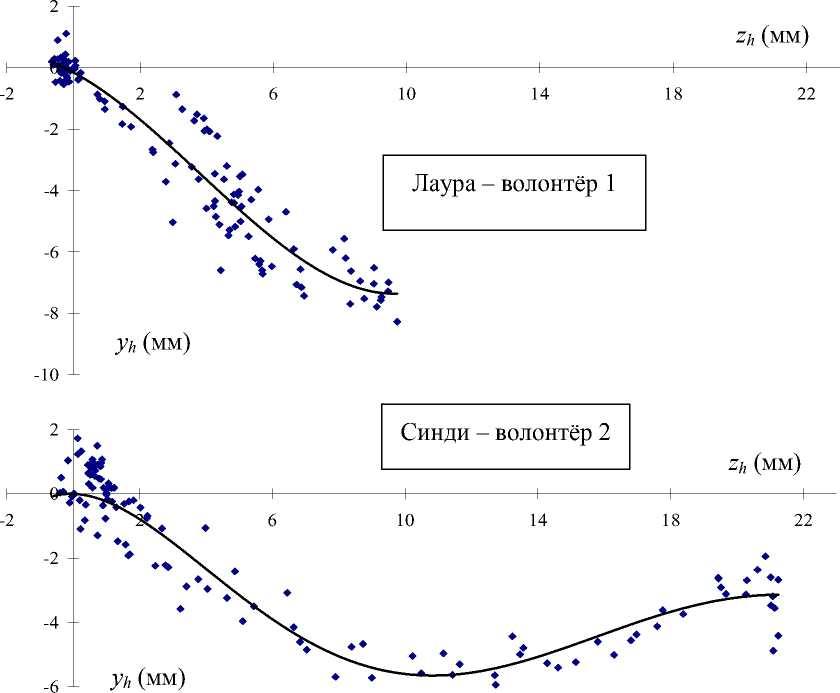
Рис. 7. Перемещение точки С в сагиттальной плоскости при раскрытии и смыкании челюстей
От положения дыхания к передней диско-мыщелковой позиции движения вып
Коне онечные движения имеют место между позицие дыхания и положением максимальной окклюзии. Они описывают перемещения точки С при смыкании зубов. Группы полученных точек показывают очень ограниченные амплитудные перемещения и отражают морфологию полости суставной ямки и деформации фиброзно-хрящевой структуры.
Дискуссия
Оригинальность этого исследования заключается в использовании нового трехмерного метода анализа височно-нижнечелюстного сустава. Механический метод, основанный на использовании пишущего индикатора, дает только плоские результаты (раскрытие и смыкание) и графики, в то время как данное исследование предлагает экспериментальный метод, переносимый на точно не определенные движения (жевание), и улучшенную обработку результатов, касающуюся гибкости обработки, получения данных и статистику на большем образце.
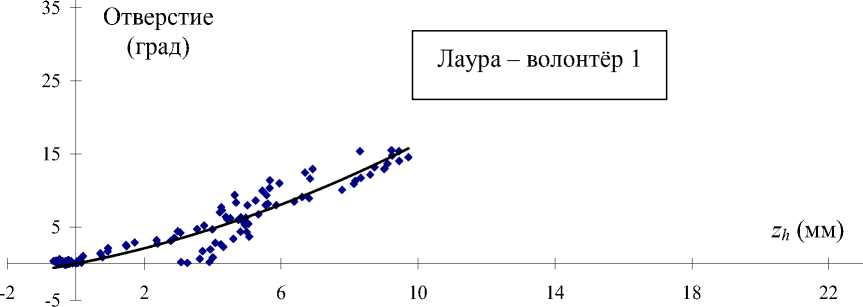
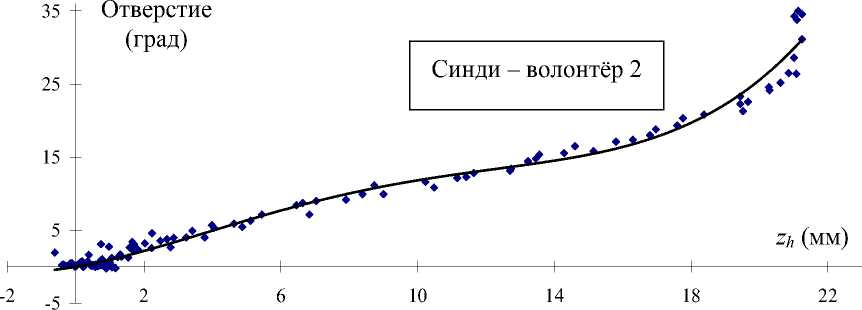
Рис. 8. Вращение вокруг оси C 1 C 2 в соответствии с перемещением точки С при раскрытии и смыкании челюстей
Нео
Чтобы проанализировать повторяемость экспериментальных данных, вер скр фик р у р поэтому постоянными. Тестирующая аппаратура сдвигалась вручную в область камер. Запись и получение данных проводились в соответствии с процедурой, описанной ранее. В этом случае амплитуда наложенных вручную перемещений была гораздо больше, чем амплитуда перемещений головки волонтеров.
Относительное положение точек C 0 и C остается неизменным. Поэтому вычисленные фиктивные перемещения точки С , центра височно-нижнечелюстного сустава относительно точки C 0 количественно характеризуют неопределенность измерения по отношению к полному перемещению пластины в заснятом пространстве. Десять относительных положений пластины было тестировано. Рис. 9 представляет одно из этих положений с рассмотрением 150 точек. Неточность оставалась ниже, чем 1 мм, в то время как перемещение точки С достигало 22 мм во время максимального раскрытия. Величина отношения 1/22 подтверждает правильность применяемого метода. При рассмотрении рассматриваемой фазы движения прибор использовали только при квазистатических перемещениях.
Одновременные перемещения
Полученные результаты находятся в противоречии с традиционной концепцией чисто вращательного движения для щели между резцами, меньшей 12 миллиметров

-1,0
-0,5
t
1,0
0,5
-0,5
-1,0
t
Перемещение y h (мм)
0,5
Перемещение z h (мм)
1,0
Рис. 9. Рамы и неопределенность перемещения
-
[ 11 ] . Когда имеет место окклюзионное раскрытие, движения раскрытия и смыкания нижней челюсти относительно височной зоны осуществляется путем одновременного поступательного движения и вращения. Этот результат описан также в работе Феррарио и Сфорца [ 12 ] .
Данная комбинация вращения и поступательного движения делается возможным благодаря фиброзно-хрящевым структурам. Анатомическое исследование путем рассечения свежих трупов подтверждает, что диск и мыщелок остаются взаимозависимыми при движениях нижней челюсти [ 2 ] . Точка контакта движется по поверхностям кости при движении качения со скольжением.
Первый анализ для проверки предусматривает применение статистического анализа метода к гораздо большему числу образцов.
Благодарность
Данное исследование не было бы возможным без вклада Лауры и Синди. Авторы хотят также поблагодарить Лабораторию анатомии и хирургии Университета 2 Бордо.
