ИЗМЕРЕНИЕ СОСТАВЛЯЮЩИХ КОМПЛЕКСНОГО СОПРОТИВЛЕНИЯ ВЗАИМНОЙ ИНДУКЦИИ

Автор: Б. М. Мамиконян, С. А. Казарян
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Системный анализ приборов и измерительных методик
Статья в выпуске: 3, 2023 года.
Бесплатный доступ
Разработано микроконтроллерное устройство цифрового измерения составляющих комплексного сопротивления взаимной индукции магнитно-связанных катушек для случая, когда из-за эффектов "емкости" и "вихревых токов" в ЭДС взаимной индукции возникают "примесь" и "фазовый дефект". При этом в комплексном сопротивлении взаимной индукции появляется активная составляющая. Для инвариантного измерения составляющих этого сопротивления использован фазовый метод в сочетании с временнÏм разделением канала измерения. Измерительная цепь (ИЦ) питается током управляемого генератора синусоидальных сигналов. Информативным параметром выходного сигнала ИЦ является угол фазового сдвига между двумя напряжениями. Эти напряжения поступают на аналоговые входы программируемого микроконтроллера (МК). В процессе измерения МК устанавливает частоту генератора, управляет переключением канала измерения, измеряет угол фазового сдвига между выходными напряжениями ИЦ и по заданным алгоритмам вычисляет составляющие комплексного сопротивления взаимной индукции. Изложены теория метода, методика расчета параметров элементов ИЦ, оценка чувствительности преобразования, анализ погрешностей измерения.
Взаимная индукция, комплексное сопротивление, измерение, фазовый метод, угол сдвига фаз, погрешность измерения
Короткий адрес: https://sciup.org/142238280
IDR: 142238280 | УДК: 543.426; 543.9
MEASUREMENT OF THE COMPONENTS OF THE COMPLEX RESISTANCE OF MUTUAL INDUCTION
A microcontroller device for digital measurement of the components of the complex resistance of mutual induction of magnetically coupled coils has been developed for the case, when due to the effects of "capacitance" and "eddy currents", an "impurity" and a "phase defect" arise in the EMF of mutual induction. An active component appears in the complex resistance of mutual induction. For invariant measurement of the components of this resistance, a phase method was used in combination with a timing separation of the measurement channel. The measuring circuit (MC) is powered by the current of a controlled generator for sinusoidal signals. An informative parameter of the MC output signal is the angle of the phase shift between two voltages. These voltages are supplied to the analog inputs of the programmable microcontroller (MCU). During the measurement, the MCU sets the generator frequency, controls the switching of the measurement channel, measures the phase shift angle between the MC output voltages, and calculates the components of the complex mutual induction resistance according to the given algorithms. The theory of the method, the technique for calculating the parameters of the MC elements, the evaluation of the sensitivity of the conversion, and the analysis of measurement errors are presented.
Текст научной статьи ИЗМЕРЕНИЕ СОСТАВЛЯЮЩИХ КОМПЛЕКСНОГО СОПРОТИВЛЕНИЯ ВЗАИМНОЙ ИНДУКЦИИ
Сопротивление взаимной индукции (ВИ) является одним из наиболее важных параметров электрических цепей, который необходимо определять для систем катушек, применяемых в различных областях, включая трансформаторы, электрические машины и аппараты, электромагнитные устройства автоматики и измерительной техники, технологии связи, производство и передачу электроэнергии. Помимо этих традиционных применений, появляются новые. Индуктивно-связанные катушки являются важными узлами систем беспроводной передачи энергии, которые уже нашли применение в бытовой электронике, промышленном производстве и медицинских имплантатах, активно изучаются возможности их применения для зарядки электромобилей. Другой развивающейся отраслью промышленности является робототехника. Здесь нужны системы точного измерения перемещений механизмов, способных работать в условиях загрязненных сред. Таким требованиям наилучшим образом удовлетворяют системы, по- строенные на базе датчика взаимной индуктивности. Широкое применение ВИ обуславливает требование постоянного совершенствования методов и средств измерения ее параметров.
МЕТОДЫ ИССЛЕДОВАНИЯ
В индуктивно связанных катушках сопротивление ВИ обычно определяется размером и геометрией обмоток, относительным положением между первичной и вторичной обмотками и витками обмоток. На частотах, превышающих f = 100 Гц, усиливаются эффекты "емкости" и "вихревых токов" [1–3]. Межвитковые емкости, потери на вихревые токи в проводниках обмоток, утечки и диэлектрические потери в изоляции приводят к ситуации, когда угол сдвига фазы между ЭДС E 2 , индуцируемой во вторичной обмотке, и током I 1 в первичной обмотке отличается от 90°. Нарушается также простая пропорциональность ЭДС E 2 частоте и значению геометрической (низкочастотной) индуктивности M 0 . Вместо идеального уравнения E 2 = jroM 0 1 1 появляется зависимость
E 2 =[ ст + jto ( M 0 + AM ) ] I 1 = ( ст + jtoM ) I 1 , (1)
где σ и Δ M — корректирующие члены, называемые соответственно "примесью" и "частотной коррекцией" M 0 на частоте f . В комплексном сопротивлении ВИ Z M = ст + jtoM увеличивается эффективная взаимная индуктивность M = M 0 + A M , а малый угол 3 = = arctg ( ст/toM ) ® ст/toM отображает фазовый дефект ВИ.
Активное сопротивление σ зависит от частоты и некоторых других факторов. Наиболее подробно теория эффектов "емкости" и "вихревых токов" изложена в [1], теоретическая оценка дает приблизительно квадратичную зависимость σ от частоты f . Показано [1], что в случае, если первичная катушка должна пропускать большой ток, отклонение от квадратуры векторов E 2 и I 1 может стать значительным: рассмотрен пример, в котором даже при сравнительно низкой частоте f = 60 Гц дефект фазы составляет 75 мин. При применении ферромагнитных сердечников дефект фазы увеличивается и может достигать 10° [4].
В ряде случаев катушка ВИ используется для высокоточного установления сдвига фазы между током и напряжением на 90°, как, например, в прямоугольно-координатных потенциометрах, в стандартах высокочастотной мощности переменного тока и др. В [2] построена эквивалентная схема замещения катушек с индуктивной связью с учетом всех паразитных емкостей и получены математические зависимости σ и Δ M от этих емкостей. При разработке стандартов высокочастотной мощности необходимо очень точно знать фазовую погрешность шунтов переменного тока [5, 6]. Погрешность фазового угла сильноточных шунтов калибруется по шунту с известным фазовым углом. Сопротивления сильноточных шунтов обычно находятся на уровне МОм, а реактивное сопротивление шунтов, которое генерируется эквивалентной индуктивностью, является доминирующей частью на высокой частоте. Измерения дефекта фазы взаимной индуктивности на частотах от 20 кГц до 200 кГц произведены в [2].
Для инвариантного измерения составляющих комплексных сопротивлений широко применяются мосты переменного тока в режиме уравновешивания [7, 8]. Для уравновешивания моста две его составляющие должны быть регулируемыми и градуированными, обычно применяются переменные образцовые сопротивления или емкости [3, 9]. С применением моста UMPT-2 были измерены угловые погрешности катушек взаимной индуктивности типов KV-1 и KVI-5 ( M = 0.01 Гн и M = 0.001 Гн) в диапазоне частот от 400 до 2500 Гц [3].
Мосты переменного тока работают обычно на низких частотах — до 1000 Гц; при работе на повышенных частотах погрешность измерения резко возрастает [10]. Мостовые методы измерения имеют общий недостаток: в них не обеспечивается выходной сигнал с единственным информативным параметром для передачи на расстояние или сопряжения со средствами вычислительной техники с целью автоматизации процесса измерения и обработки результатов измерений.
СУЩНОСТЬ РАЗВИВАЕМОГО МЕТОДА ИЗМЕРЕНИЯ
Как показано в настоящем исследовании, указанный недостаток мостовых методов можно устранить, если использовать фазовый метод измерения составляющих ZM [11]. Сущность метода поясняется с помощью рис. 1 .
В измерительной цепи (ИЦ) с первичной обмоткой ВИ последовательно соединены два образцовых резистора: опорный резистор R 1 и дополнительный резистор R 2 . В ИЦ измеряемые параметры σ и M преобразуются в угол фазового сдвига φ между выходными напряжениями uS и uN , которые поступают на аналоговые входы микроконтроллера (МК), при этом вторичная обмотка ВИ работает в режиме холостого хода.
В первом ( а ) и втором ( б ) положениях переключателя имеем соответственно
U s 1 = I ( R 1 + ст + jtoM ) ,
US 2 = I ( R1 + R2 + ст + jtoM ), а опорное напряжение UN = IR1, где I — измерительный ток. Следовательно, будем иметь tg Ф1 = toM /(ст + Ri), (2)
tg ф2 = toM(ст + R1 + R 2), преобразованием которых получаем to (ctg Ф2 - ctg Ф1)’
( R i + R 2 ) ctg Ф 1 - R i ctg Ф 2
ст = :. (4)
ctg Ф 2 - ctg Ф 1
Видно, что обеспечивается независимое друг от друга (инвариантное) определение M и σ , при этом необходимо измерить только угол φ в двух положениях переключателя, а результат измерения не зависит от стабильности измерительного тока.
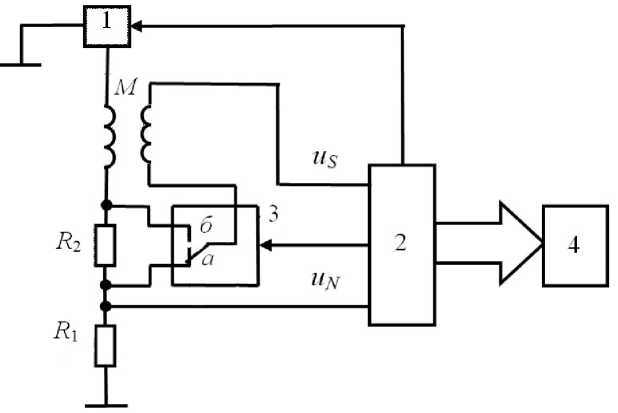
Рис. 1. Упрощенная функциональная схема измерителя.
1 — генератор синусоидального напряжения с программируемой частотой, 2 — микроконтроллер, 3 — электронный переключатель, 4 — цифровое табло
В экспериментальном образце измерителя использованы микросхема генератора AD9833 [12] и МК типа PIC32MX695F512H [13]. Аналоговые входы МК снабжены компараторами, где угол φ преобразуется во временной интервал τ , который измеряется в МК методом дискретного счета. При каждом измерении МК устанавливает требуемую частоту ω генератора, управляет положением переключателя, измеряет углы φ 1 и φ 2 , вычисляет значения M и σ по алгоритмам (3) и (4) и выводит результаты измерения на цифровое табло.
ВЫБОР ДИАПАЗОНА ШКАЛЫ И АНАЛИЗ ЧУВСТВИТЕЛЬНОСТИ
Анализ показывает, что из-за особенностей тангенсных и котангенсных функций чувствительность преобразования А ф = ф 1 - ф2 максимальна в середине шкалы 0 ° < ф < 90 ° угла и падает по краям этого диапазона, поэтому шкала угла ф выбрана в диапазоне 15 ° < ф < 75 ° , что реализуется выбором сопротивлений R 1 и R 2 с учетом диапазонов измерения M и σ . При этом, поскольку Ф 1 > ф 2, то верхний предел шкалы устанавливается значением сопротивления R 1, а нижний — значением сопротивления R 2 .
Выполним расчет этих сопротивлений для случая частоты измерительного тока f = 1000 Гц и диапазонов измерения σ = 1–10 Ом, ωM = 100– 1000 Ом. Исключив из двух выражений (2) сумму (ст + R1), получаем
R 2 = to ( M min • ctg Ф 2тп — M max ' ctg Ф 1тах ) •
С учетом значений ctg15 ° = 3.732 и ctg75 ° = = 0.268 получаем для шкалы M значение R 2 - 105 Ом, а также ст + R 1 = 1000/3.732 -- 268 Ом, ст + R 1 + R 2 = 100/0.268 - 373 Ом. При этих значениях находим также углы ϕ 1min и ϕ 2max :
tg Ф 1т.п = ^M mn = 100 - 0.373, Ф 1„,п - 20.45 ° ;
ст + R1
tg ϕ 2
= ® M max = 1000 - 2.681, = 69.55 ° .
max2max ст + R1 + R2373
По результатам расчета чувствительности преобразования на рис. 2 построена кривая зависимости А ф = f ( ф ) .
Для выбора шкалы σ следует учесть, что с увеличением σ угол φ уменьшается, как видно из (2). Поэтому целесообразно измерить вместо σ добротность вторичной обмотки ВИ Q = toM/ст , поскольку, имея значения ωM и Q , МК вычислит значения σ .
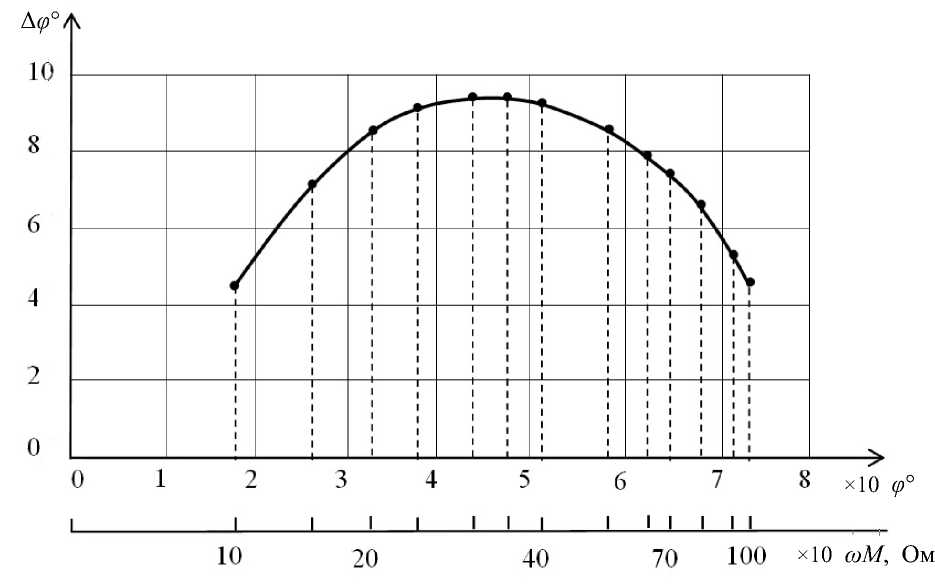
Рис. 2. График зависимости чувствительности преобразования А ф = f ( ф ) вдоль шкалы угла ф
Из (3) и (4) следует, что
tg Ф 2min =
Q = 7--------. R'-------------,
( R i + R 2 ) ctg ф 1 - R , ctg Ф 2
Q min
Q max/ tg Ф 1max + R 2/ ° ’
а диапазон измерения Q , определяемый диапазонами измерения ωM и σ , будет Q = 100–1000. Представим формулы (2) в виде:
tg ϕ 1
Q
1 + R 1 о ’
откуда находим отношение
R 2/ ° = Q min/ tg Ф 2min - Q max/ tg Ф 1тах » 105
Следовательно, о = R 2 /105 = 1.0 для всей шкалы, с учетом чего из (8) находим R 1 = 267 Ом. Таким образом, для M и Q получаем единую шкалу угла φ .
tg Ф 2 =
Q
1 + ( R i + R 2 ) о
Для шкалы Q целесообразно сохранить значение сопротивления R 2 = 105 Ом, которым устанавливается чувствительность преобразования. Для отметки ϕ 1max шкалы из (6) определяем
1 + R 1 ° = Q max/ tg Ф 1max (8)
и подставляем в формулу (7), представленную для начальной отметки шкалы:
ИССЛЕДОВАНИЕ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ
Произведена теоретическая оценка погрешностей определения M и Q по формулам (3) и (5). Нестабильность частоты ω не вызывает погрешности в (3), поскольку при вычислении угла φ по формуле ф = (т/ T ) • 360 ° МК измеряет также период T = 1] f измерительного тока. Поэтому относительная погрешность определения M будет
Y ( M ) _
A M _ A R 2 + A ( ctg ф 1 ) -A ( ctg Ф 2 ) M R 2 ctg Ф 2 - ctg Ф 1
_ Yr ( M ) + Yф (M ),( где обозначены частные погрешности:
Yr (M) = AR2/R2 _ y(R2),(10)
Y (M)_ A(ctgФ1)-A(ctgФ2) _ ф ctg Ф2 - ctg Ф1
_ ctgФ1 - Y(ctgФ1)-ctgФ2 - Y(ctgФ2)
ctg Ф2 - ctg Ф1
Аналогичным образом получаем из выражения (5):
Y ( Q ) _ Y r ( Q ) + Y ф ( Q ) ,
Ar ( Q)
Y r ( Q ) _ "Q^
_ R i ( ctg Ф 2 -ctg Ф 1 ) [ Y ( R i ) - Y ( R 2 ) ]
( R + R 2 ) ctg Ф 1 - R i ctg Ф 2 ,
Y ф ( Q 1^ _
_ R L• ctg ф 2; Y (ctg ф 2) - ( R ^+ R 2) ctgf ; • Y (ctg ф 1) ( R + R 2 ) ctg ф 1 - R i ctg Ф 2
Анализ показывает, что фазовый метод измерения параметров ВИ чрезмерно критичен к стабильности сопротивлений резисторов R1 и R2 , поэтому выбраны наиболее высокоточные металлофольговые резисторы типа С5-61 [14]. С учетом значений допуска ±0.005% от номинального сопротивления RN и ТКС at _ ±10 -106 °C1 абсолютное изменение сопротивления резистора в нормальных условиях эксплуатации (при температуре 20 ± 5 °C) будет
ARx _ 0.00005R, +ARt -±1.5-10-4 R,, где ARt _at -At- R, _ 10-10-6 -10R, _±10-4R, — температурное изменение сопротивления резистора. Следовательно, частная относительная погрешность измерения M от изменения сопротивления резистора R2 с учетом (10) будет
Y r ( M ) _ Y ( R ) _A R z/ Rw _ 1.5 - 10 - 4 .
Можно считать, что погрешности резисторов R 1 и R 2 являются некоррелированными случайными величинами с нормальными законами распределения, поэтому для среднеквадратических отклонений о [ y ( R ) ] их сопротивлений можно принять с доверительной вероятностью 0.95 [15]
о [ Y ( R 1 ) ] _ 0 [ Y ( R 2 ) ] _ 0 [ Y ( R ) ] _ 0.5A R x _
_ 0.75-10-4, с учетом чего получаем
0 [ Y ( R 1 )- Y ( R 2 ) ] _ V2 0 2 [ Y ( R ) ] _
_ 1.41 o [ y ( R ) ]_ 1.41 - 0.75 - 10 - 4 » 1.06 - 10 - 4 .
Подставляя в (12)
[ Y ( R 1 ) - Y ( R 2 ) ]_ 2 - о [ Y ( R 1 ) - Y ( R 2 ) ]* 2.1 - 10 - 4
и значения сопротивлений R 1 и R 2 , получаем
_ 2.1 - 10 - 4 - ( ctg Ф 2 - ctg Ф 1 )
-
1.4 - ctg Ф 1 - ctg Ф 2
В табл. 1 представлены результаты расчета
Y r ( Q ) по формуле (14), где принято обозначение A _ ctg Ф 2 - ctg Ф 1 .
Табл. 1. Расчетные значения погрешности y r ( Q ) при R 1 _ 267 Ом, R 2 _ 105 Ом
|
Функция |
Q |
|||||||||
|
100 |
200 |
300 |
400 |
500 |
600 |
700 |
800 |
900 |
1000 |
|
|
ctg ϕ 1 |
2.680 |
1.340 |
0.893 |
0.670 |
0.536 |
0.446 |
0.383 |
0.335 |
0.298 |
0.268 |
|
ctg ϕ 2 |
3.730 |
1.865 |
1.243 |
0.933 |
0.746 |
0.621 |
0.533 |
0.466 |
0.415 |
0.373 |
|
A |
1.050 |
0.525 |
0.350 |
0.263 |
0.210 |
0.175 |
0.150 |
0.131 |
0.117 |
0.105 |
|
Y r ( Q ) , % |
1.00 |
1.002 |
1.021 |
1.105 |
1.002 |
1.081 |
0.984 |
0.917 |
1.112 |
1.002 |
Расчеты показывают, что частная погрешность определения Q от изменения сопротивлений резисторов R 1 и R 2 с доверительной вероятностью 0.95 не превышает значения y R ( Q ) — 1.2%. Для уменьшения этой погрешности можно перед монтажом резисторов определить точные значения их сопротивлений.
Частные погрешности уф (M) по формуле (11) и Уф (Q) по формуле (13) зависят от точности измерения фазовых углов φ1 и φ2. Относительная погрешность измерения фазового сдвига φ имеет две составляющие: погрешность у(т) преобразования угла φ во временной интервал τ и погрешность у (ф) — фф/ф измерения длительности импульсного сигнала — у Д Ф ) = Y (т) + Y (ф ). Погрешность у (т) зависит от напряжений смещения нуля входных компараторов МК; практически ее можно устранить, используя способ биполярного измерения, при котором τ определяется по четырем моментам перехода через нулевые значения синусоиды в обоих направлениях (в течение одного периода входного напряжения получаются два временных интервала т) [16]. Следовательно, относительная погрешность определения ctgϕ будет зависеть только от точности измерения фазового сдвига φ и может быть вычислена по выражению у (ctg ф , '" ctg ф) — J.д^5t8Фl ,фф = ctg ф ctg ф дф
Ф Аф _ 2ф- Y ( ф )
—--I--- • ----- —--.
ctg ф • sin2 ф ф sin 2ф или
7 в 1 2 • Y 2 ( ф ) • ctg2 ф + в 22 • Y 2 ( ф 2 ) • ctg2 ф 2~
ctg ф 2 - ctg ф
Т.к. углы φ 1 и φ 2 измеряются одними и теми же аппаратными средствами практически одновременно, то можно принять, что у ( ф 1 ) ~ ~ Y ( ф 2 ) — Y ( ф ) , следовательно,
( , , X Y ( ф ) 7 в 1 • ctg ф + в 2 • ctg ф 2
Yф(M)— —;-----;--------- ctg ф2 - ctg ф1
С учетом выражения β получаем:
Y ф ( M ) —
0.0175 • y ( ф ) ctg ф 2 - ctg ф 1 ^|
ф ^ I v sin2 ф 1 J
_Ф^_
^ Sin ф 2
Произведя аналогичные действия с выражением (13), получаем:
Y ф ( Q ) —
X
Y ( ctg ф ) —
2пф^у ( ф ) 180 • sin2 ф
0.035 ф ^ у ( ф ) sin 2 ϕ
— в • Y ( ф ) ,
0.035 ϕ где в —--, а угол ф выражен в радианах.
sin 2 ϕ
Следовательно,
Y ( ctg ф ) — А • Y ( ф ) , Y ( ctg ф 2 ) — в 2 • Y ( ф 2 ) .
Погрешности у ( ctg ф 1 ) и у ( ctg ф 2 ) являются случайными и независимыми, поэтому с доверительной вероятностью 0.95 можно принять, что Y ( ctg ф ) — 2 ^ ( ctg ф , ) , Y ( ctg ф 2 ) — 2 ^ ( ctg ф 2 ) , следовательно, c учетом выражения (11) получаем:
Y ф ( M ) —
0.0175 • y ( ф )
( 1+ R 2/ R 1 ) ctg ф 1 - ctg ф 2
ф 2
v sin2 ф 2
I + ( 1 + R 2 /R 1 ) 2 •
_фк_ I v sin2 ф1 J
.
Для вычисления погрешностей по выражениям (15) и (16) необходимо найти значение у (ф). Измерение фазового сдвига φ выполняется в МК по формуле ф — (т/T)• 360° путем заполнения временных интервалов т и T импульсами образцовой частоты f, — 80 МГц тактового генератора. Показание таймер-счетчика будет ф — nf^ • 360° — n • 360°, Nf0 N где n и N — количества импульсов, поступивших на таймер-счетчик за время τ и T соответственно.
Абсолютная погрешность измерения угла φ будет
. дф . дф . (Аn n .
Аф — -Аn +—AN —----AN 360°, дп dN In N2 J
а относительная погрешность:
у (ф) —Аф ϕ
A n NJ
—
.
nN
Табл. 2. Расчетные значения погрешности Y ф ( M ) при R 1 = 267 Ом, R 2 = 105 Ом, f = 1.0 кГц, f) = 80 МГц
|
Функция |
ωM , Ом |
|||||||||
|
100 |
200 |
300 |
400 |
500 |
600 |
700 |
800 |
900 |
1000 |
|
|
A |
1.050 |
0.525 |
0.350 |
0.263 |
0.210 |
0.175 |
0.150 |
0.131 |
0.117 |
0.105 |
|
φ 1 , град. |
20.455 |
36.723 |
48.214 |
56.168 |
61.800 |
65.923 |
69.043 |
71.473 |
73.412 |
75.000 |
|
φ 2 , град. |
15.000 |
28.191 |
38.799 |
46.990 |
53.267 |
58.123 |
61.940 |
64.995 |
67.481 |
69.538 |
|
B |
4.878 |
2.857 |
2.293 |
2.090 |
2.004 |
1.970 |
1.958 |
1.959 |
1.962 |
1.969 |
|
Y ( ф ) - 105 |
31.250 |
17.238 |
12.848 |
10.827 |
9.698 |
8.992 |
8.515 |
8.174 |
7.919 |
7.721 |
|
Y ф ( M ) - 10 3 % |
2.547 |
1.642 |
1.473 |
1.506 |
1.620 |
1.772 |
1.945 |
2.136 |
2.324 |
2.534 |
Погрешность у ( ф ) определяется случайной погрешностью дискретности, т.е. возможностью потери в числах n и N по одному счетному импульсу. Наихудший случай имеет место, когда A n = 1, AN = - 1:
1 1 Г Т ,11
y ( ф ) = 1 +± = Ts- + A- = T I 1 + A n N nT0 NT0 0 ( т T

360 °
ϕ
При имеющихся значениях J = 1.0 кГц, f 0 = 80 МГц получаем
Y ( ф ) = ± 1.25 - 10 - 5 -I 1 + 360- L
I Ф )
В табл. 2 представлены результаты расчета погрешности Yф ( M ) , вычисленные по формулам (15) и (17), где приняты обозначения
Аналогичный расчет по формулам (16) и (17) погрешности Yф ( Q ) показал, что она также минимальна в середине шкалы, где Yф ( Q ) ~ 0.57% при ф = 45 ° , и принимает максимальное значение Yф ( Q ) = 1.16% в начале шкалы при Q = 100. Видно, что Yф ( Q ) существенно больше Yф ( M ) •
Частные погрешности Y r ( M ) и Y ф ( M ) , Y R ( Q ) и Yф ( Q ) случайны и независимы, поэтому пределы допускаемых полных основных относительных погрешностей определения M и Q с доверительной вероятностью 0.95 будут
Y (M) = J[Yr (M )]2 +[Yф (M)]2 =
= 10 - 4 - V 1.52 + 0.255 2 » 0.016%,
Y(Q) = V[Yr (Q)]2 +[Yф(Q)]2 =
= 10 - 2 - V 1.2 2 + 1.162 » 1.67%
A = ctgФ2 -ctgфх, соответственно, с учетом соотношения <г = aM/Q
B =
Ф 1
\ I sin2 Ф 1
+
Ф 2
v sin2 ф2
получаем
Y (^) = V[ Y (M)] 2 +[ Y (Q)] 2 =
а в формуле (17) подставлены значения ф = ф 2, поскольку всегда ф 2 < ф 1 , а нас интересует предел допускаемой погрешности измерения. Из табл. 2 видно, что погрешность Yф ( M ) минимальна в средней части шкалы угла ф , при ф = 45 ° Yф ( M ) » 1.46 - 10 - 3% , и увеличивается по краям шкалы. Максимальное значение этой погрешности равно 2.547 - 10 - 3% .
= V 0.0162 + 1.672 » 1.68%.
ВЫВОДЫ
В фазовом методе не используются аналоговые сигналы. Во многом благодаря этому метод позволяет сравнительно просто автоматизировать процесс измерения, реализовать инвариантное цифровое измерение активной и реактивной составляющих комплексного сопротивления ВИ магнитно- связанных катушек и обеспечить достаточную для практики точность. Результаты исследования показывают, что в разработанном микроконтроллерном устройстве погрешности определения активного сопротивления σ и индуктивности M комплексного сопротивления ВИ можно обеспечить не более у(^) = 1.68% и Y (M) = 0.016% с доверительной вероятностью 0.95. При этом можно уменьшить погрешности измерения сужением по краям шкалы угла φ.
Список литературы ИЗМЕРЕНИЕ СОСТАВЛЯЮЩИХ КОМПЛЕКСНОГО СОПРОТИВЛЕНИЯ ВЗАИМНОЙ ИНДУКЦИИ
- 1. Silsbee F.B. A study of the inductance of four-terminal resistance standards. London: Forgotten Books Publisher, 2016. 54 p.
- 2. Zhang J., Lui W., Pan X. et al. Design and measurement of the nH level mutual inductor // 19th IMEKO TC-4 Symposium and 17th IWADC Workshop Advances Instrumentation and Sensors Interoperability, 18–19.07.2013. Barcelona, Spain. P. 389–390. URL: https://www.imeko.org/publications/tc4-2013/IMEKOTC4-2013-096.pdf
- 3. Veksler A.Z. Measurement of angle errors of mutual inductance coils by means of an alternating current bridge //
- Measurement Techniques. 1959. Vol. 2, is. 6. P. 445–447. DOI: 10.1007/BF00975983
- 4. Р5017 магазин комплексной взаимной индуктивности. https://ross.com.ru/magazin-kompleksnoi-vzaimnoiinduktivnosti-r-5017
- 5. Budovsky I. Measurement of phase angle errors of precision current shunts in the frequency range from 40 Hz to 200 kHz // IEEE Trans. Instrum. Meas. 2007. Vol. 56, no. 2. P. 284–288. DOI: 10.1109/TIM.2007.891117
- 6. Pan X., Zhang J., Ma X., et al. A Coaxial time constant standard for determination of phase error of current shunts up to 200 kHz // IEEE Trans. Instrum. Meas. 2013. Vol. 62, no. 1. P. 199–204. DOI: 10.1109/TIM.2012.2212595
- 7. Нефедов В.И., Сигов А.С., Битюков В.К., Самохина Е.В. Электрорадиоизмерения. Учебник. М.: ФОРУМ, ИНФРА-М, 2018. 383 с.
- 8. Лушин Е.В., Долгов А.Н. Способы измерения индуктивности // Приволжский научный вестник. 2013. № 12, ч. 2. C. 36–40. URL: https://elibrary.ru/item.asp?id=21072153
- 9. Марченко А.Л., Опадчий Ю.Ф. Электротехника и электроника. Учебник. М.: ИНФРА-М, 2022. 391 с. 10. Дивин, А.Г., Пономарев С.В. Методы и средства измерений, испытаний и контроля. Учебное пособие. Ч. 1. Тамбов: Изд-во ГОУ ВПО ТГТУ, 2011. 104 с.
- 11. Мамиконян Б.М., Мамиконян Х.Б. Методы и средства раздельного измерения параметров катушек индуктивности на переменном токе // Вестник НПУА: Электротехника, энергетика. 2014, № 2. С. 9–24. URL: https://elibrary.ru/item.asp?id=35061218
- 12. AD9833 Programmable Waveform Generator. https://static.chipdip.ru/lib/691/DOC011691452.pdf
- 13. PIC32MX695F512H. Высокопроизводительный 32-разрядный микроконтроллер с интерфейсами USB и Ethernet. http://www.triatron.ru/upload/catalog_photo/elements/pdf/035343.pdf
- 14. Резисторы постоянные металлофольговые С5-61. http://amb-lab.narod.ru/References/ES/0004-3-1992/016.pdf
- 15. Новицкий П.В., Зограф И.А. Оценка погрешностей результатов измерений. Л.: Энергоатомиздат, 1985. 248 с.
- 16. Орнатский П.П. Автоматические измер
