Измерение увода бурового инструмента и угла закручивания бурильной колонны

Автор: Цветков Г.А., Крюков С.А.
Журнал: Вестник Пермского университета. Геология @geology-vestnik-psu
Рубрика: Геофизика, геофизические методы поисков полезных ископаемых
Статья в выпуске: 1 (14), 2012 года.
Бесплатный доступ
Предлагается конструкция, позволяющая измерять увод инструмента и угол за- кручивания буровой колонны для ориентации долота на забое и проводке сква- жин. Для максимальной точности устройство устанавливается максимально близ- ко к породоразрушающему инструменту.
Инклинометрия, бурение, ускорение, гравитация
Короткий адрес: https://sciup.org/147200805
IDR: 147200805 | УДК: 550.
Measurement of withdrawal and twisting angle of boring column
The tool to measure of the withdrawal and the angle of twist at the wiring holes is proposed.
Текст научной статьи Измерение увода бурового инструмента и угла закручивания бурильной колонны
Применяемая компоновка низа бурильной колонны для направленного бурения скважины включает породоразрушающий инструмент, кривой переводник с шарнирной соединительной муфтой, забойный двигатель и расположенный над ним инклинометр. Инклинометр оборудован измерительным модулем азимутального угла для установки отклонителя. Траектория ствола скважины выдерживается с помощью системы получения скважинной информации в процессе бурения (MWD) Недостатком указанного устройства является неустойчивость процесса ориентирования из-за непредсказуемого закручивания низа бурильной колонны и увода инструмента. Увод долота при бурении возникает вследствие неравномерной плотности породы, вибрации буровой колонны и несовершенства инструмента Телесистема «Сперри-Сан» включает датчик динамических параметров «ДДС» бурильной колонны, предназначенный для определения разрушающих вибраций. Используя информацию, получаемую от датчика, можно оптимизтровать условия, вызывающие проскальзывание, удар, биение
долота. Закручивание буровой колонны происходит под действием реактивного момента двигателя турбобура и вследствие трения между колонной и стенками скважины, напряженного состояния горных пород.
Предлагаемая конструкция позволит измерять увод инструмента и угол закручивания буровой колонны при ориентации долота на забое и построении нефтегазовых скважин. Модуль-устройство устанавливается максимально близко к породоразрушающему инструменту.
Существует автоматизированная система измерения пространственных угловых отклонений [1, 2, 3], состоящая из наклономера с подвесом инерциальной массы на газодинамической опоре, расположенного на платформе, которая имеет возможность поворачиваться вокруг вертикальной оси. Она позволяет измерять две пространственные (рис.1) координаты отклонения контрольных площадок от горизонта, а также вычислить угол закручивания (скрутки). Чувствительными элементами являются акселерометры, расположенные так, что их оси чувствительности
составляют ортогональную измерительную систему координат.
Исходная система координат OXYZ инструментом. Перед спуском в скважину (рис. 2) связана с устьем скважины. Ось инструмент ориентируют так, чтобы си
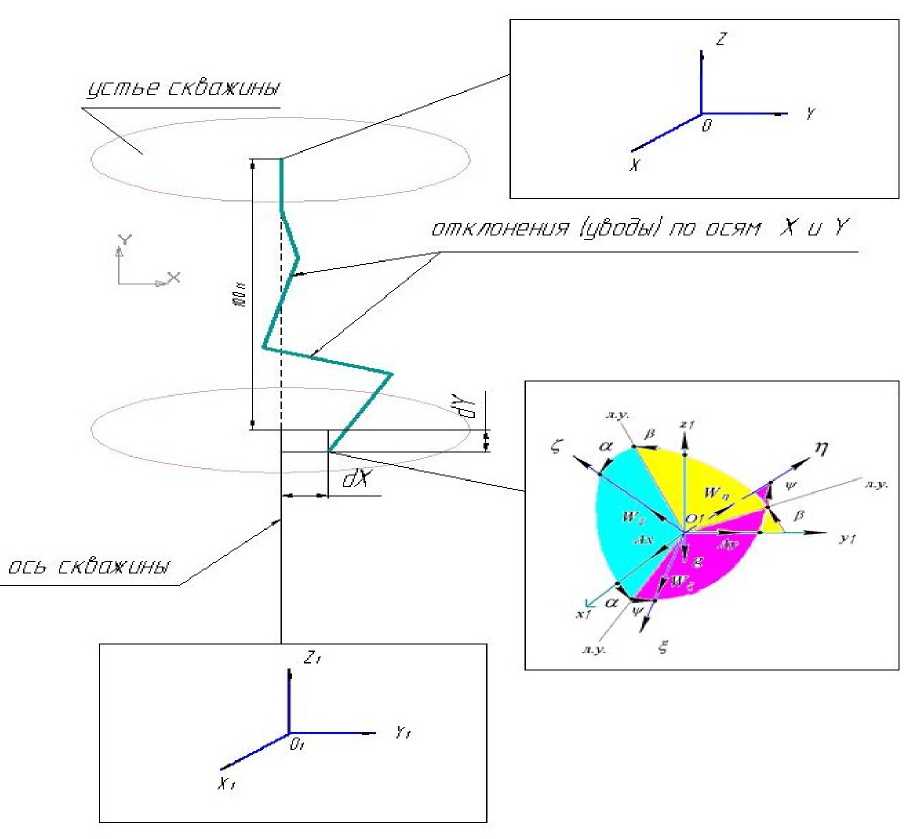
стемы координат OXYZ и Оξηζ совпада ли.
OX направлена на магнитный север, ось OZ – вертикально. Измерение проводится в системе координат Оξηζ, связанной с
Рис.1. Структурная схема измерения углов увода
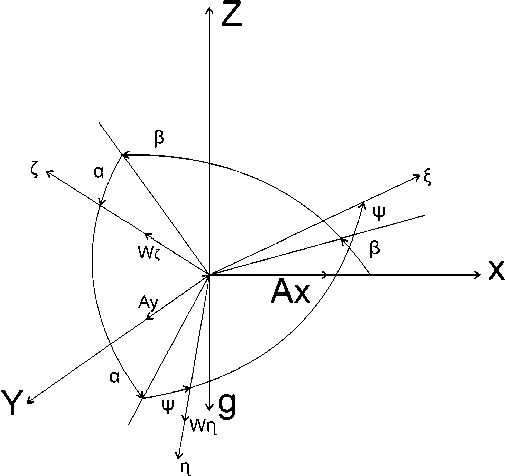
Рис.2. Углы рассогласования между базовой системой координат XOYZ, и системой ξОηζ при измерении: Ψ – азимутальный угол; α – угол закручивания БК; β – угол наклона продольной оси
На систему действует ускорение =, того положения, когда Wn = 0, Wz * max направленное вдоль оси ОZ. Проекции [1,2,3].
ускорения на связанные оси Оξηζ будут Тогда
W , = - g *cos ~ isin ■ ' *cos о H g *sin ~ *sin о
иметь вид:
-
♦ W = -g *cos ~ *cos ' "
I —
IW , = g fem ~ *cos о H g *cos ~ *sin fem о
I ♦
Углы β и Ψ малы, тогда sinβ = β, sinΨ = Ψ, cosβ = cosΨ =1.
Выражение (1) примет вид
-
♦ W = - g *cos ~
* -
|W , = g fcm ~
-
* W4 = - g *cos ~ *z H g isin ~ *0
. (2)
или
-
♦W = - g *cos ~
* ^
|W , = g *sin ~
Jw , = W - * x H W , * . (3)
Соотношение (3) позволяет определить угол скрутки α.
Для определения углов β и Ψ следует развернуть платформу вокруг оси Оξ до
W,=W *-■ * "■ T ---- W , - max
- m или
X t U3 *g
KH 3 U 2max
Далее
W
W = W * — H W * 0 - ■ w
- max
*
WiW'I t — i — H1*;
W i W max
, у — max
Угол закрутки найдём из первых двух уравнений системы (3)
W
~ t H arctg —
W
—
В статье рассмотрен принцип измерения углов увода бурового инструмента в процессе построения нефтегазовых скважин и угла закручивания.
Точностные характеристики системы зависят от условий использования и кон- кретного конструктивного решения, напряженного состояния горных пород в естественном залегании за счет гравитационных и других сил [4, 5].
Список литературы Измерение увода бурового инструмента и угла закручивания бурильной колонны
- Цветков Г.А., Утробин Г.Ф., Каган М.Г. Автоматизированная системаконтроля пространственных угловых отклонений/Вестн. Перм. техн. ун-та. Аэрокосмическая техника. 2004. №18. С. 130-134.
- Цветков Г.А., В.А. Каплун, Певзнер Л.А. Инерционные характеристики элементов компоновки низа бурового инструмента в вопросах стабилизации, ориентации и прецизионного построения скважин//Матер. Всерос. совещ. Ярославль, 2001. С. 193-196.
- Цветков Г.А., Каган М.Г., Костицын В.И. Повышение точности определения положения забоя скважин минимизацией погрешностей пеленгации сейсмических колебаний//Наземная, морская и аэрогравиметрия: измерение на неподвижных и подвижных основаниях: матер. Междунар. симпозиума. г.Санкт-Петербург, 2007. С. 18-19.
- Цветков Г.А, Балуева Н.Ю., Костицын В.И. Повышение точности метрологического обеспечения инклинометрических измерений//Научные исследования и инновации/Перм. техн. ун-т. 2009. Т.3, №4. С. 98-103.
- Цветков Г.А. Автоматизированный измерительно-вычислительный комплекс для определения массово-инерциальных характеристик КЛА/Перм. воен. ин-т. Пермь, 2003.
