Экспериментальные исследования и идентификация модели динамической системы «виброзащитное кресло - оператор» мобильной машины

Автор: Абызов А.А., Мухиддинзода К.Д.
Рубрика: Контроль и испытания
Статья в выпуске: 4 т.23, 2023 года.
Бесплатный доступ
При создании новых образцов транспортных и технологических мобильных машин важно обеспечить выполнение санитарных норм по вибрациям на месте водителя. Виброзащитные сиденья широко используются для уменьшения вибраций, передаваемых от двигателя и ходовой части машины на рабочее место оператора. Для обоснованного выбора параметров сиденья при проектировании машины применяют математическое моделирование. Виброзащитное сиденье вместе с телом оператора образуют единую динамическую систему, поэтому математическая модель должна включать как виброзащитное сиденье, так и тело оператора. В статье представлен обзор математических моделей, описывающих вертикальные колебания тела сидящего человека. Описана экспериментальная установка для изучения динамики человека-оператора, находящегося в виброзащитном сиденье. Установка включает электродинамический вибростенд, на который установлено сиденье, управляющую и регистрирующую аппаратуру. Исследования проводились для виброзащитного сиденья Sibeco. В процессе испытаний основание кресла совершало вертикальные гармонические колебания с плавно увеличивающейся частотой, при этом амплитуда виброускорений поддерживалась постоянной. Акселерометры, установленные на элементах сиденья, на специальном диске, находящемся на подушке сиденья и на теле оператора, регистрировали колебания этих элементов. В результате обработки результатов эксперимента получены передаточные функции, связывающие амплитуды перемещений различных элементов модели с перемещениями основания в заданном частотном диапазоне. Эксперименты проводились с участием испытателей, имеющих различную массу тела. Предложена математическая модель, описывающая вертикальные колебания системы «виброзащитное сиденье - тело оператора». Инерционные и упруго-демпфирующие характеристики элементов сиденья были определены ранее в ходе специальных испытаний. На основании сопоставления расчетных и экспериментальных данных уточнены параметры элементов модели, описывающих тело оператора. Полученные в ходе исследования параметры математической модели будут использованы в дальнейшем для расчетных оценок вибронагруженности рабочего места оператора.
Виброзащитное сиденье, математическая модель, динамическое воздействие
Короткий адрес: https://sciup.org/147242637
IDR: 147242637 | УДК: 629.033 | DOI: 10.14529/engin230406
Experimental studies and identifying a model of the dynamic system “anti-vibration seat - operator” of a mobile machine
When creating new types of transport and technological mobile machines, it is important to ensure compliance with sanitary standards for vibrations at the driver’s seat. Anti-vibration seats are widely used to reduce vibrations transmitted from the engine and chassis of the machine to the operator's workplace. When designing a machine, mathematical modeling can be used to make a reasonable choice of seat parameters. Since the anti-vibration seat together with the operator’s body form a single dynamic system, the mathematical model must include both the anti-vibration seat and the operator’s body. The article presents an overview of mathematical models that describe vertical vibrations of the seated body. It describes an experimental setup for studying the dynamics of a human operator sitting in an anti-vibration seat. The experimental setup includes an electrodynamic vibration bench produced by LDS, control and recording equipment. The studies were carried out for the Sibeco anti-vibration seat. During testing, the base of the seat performed vertical harmonic vibrations with a gradually increasing frequency, while the amplitude of vibration accelerations was maintained constant. The accelerometers installed on the seat elements, on a special disk located on the seat cushion and on the operator’s body, recorded vibrations of these elements. As a result of processing experimental data, transfer functions were obtained. They connect the amplitudes of movement of various elements of the model with movements of the base in a given frequency range. The experiments were carried out with the participation of testers with different body weights. The article proposes a mathematical model that describes the vertical vibrations of the “vibration-protective seat - operator’s body” system. The inertial and elastic-damping characteristics of the seat elements were determined earlier during special tests. Based on a comparison of calculated and experimental data, the parameters of the model elements describing the operator’s body were refined. The parameters of the mathematical model obtained during the study will be used in the future research for calculation estimates of the vibration load of the operator’s workplace.
Текст научной статьи Экспериментальные исследования и идентификация модели динамической системы «виброзащитное кресло - оператор» мобильной машины
В настоящее время при создании транспортных и технологических машин различного назначения важным является обеспечение комфортных условий и выполнение санитарных норм на рабочем месте водителя-оператора. Для промышленных гусеничных тракторов особенно важной является задача защиты от вибраций, поступающих от гусеничного движителя, двигателя и технологического оборудования. Превышение допустимого уровня вибраций приводит к повышенной утомляемости водителя, а также к заболеваниям позвоночника и вибрационной болезни [1]. Снизить уровень вибраций до приемлемого уровня в источнике или за счет виброизоляции кабины удается далеко не всегда, поэтому в качестве элементов защиты оператора широко применяются виброзащитные сиденья различной конструкции.
Для выбора оптимальных параметров сиденья при проектировании машины применяется математическое моделирование. Для получения наиболее точных результатов необходимо использовать математическую модель, описывающую динамику системы «виброзащитное кресло – тело оператора». В настоящее время при расчетах часто используют упрощенные модели, где тело оператора заменяется сосредоточенной массой. Повысить точность результатов исследований можно при использовании более сложных моделей. При этом также появится возможность исследовать колебания различных частей тела водителя-оператора и использовать новые критерии вибрационной нагруженности, например, энергию, поглощаемую телом [2, 3]. Важность учета динамических процессов в колеблющемся теле оператора косвенно подтверждается нормативными документами (например, [4]), предусматривающими проведение стендовых испытаний виброзащитных сидений вместе с находящимся на них человеком. В настоящее время разработан ряд математических моделей, описывающий колебания тела водителя-оператора. Однако при этом модели, предлагаемые различными исследователями, имеют разную структуру и каждая из них соответствует оператору с какой-либо одной массой тела. В связи с этим актуальной является задача разработки математической модели системы «виброзащитное кресло – тело водителя-оператора» и определение набора ее параметров, соответствующих операторам с различной массой тела.
Виброзащитные сиденья по конструкции можно разделить на две большие группы – с пассивной и активной системами подрессоривания. Сиденья первого типа наиболее распространены, их конструкция обычно включает упругий и демпфирующий элементы в системе подрессорива-ния, а также мягкую подушку. В качестве упругого элемента могут использоваться пружины, торсионы, пневматические рессоры. Конструкция сиденья обычно предусматривает регулировку по росту и массе водителя.
Сиденья с активным подрессориванием могут включать управляемые упругие элементы или амотризаторы, характеристика которых изменяется при колебаниях сиденья [5], исполнительные механизмы, задающие силовое воздействие на подвижную часть сиденья в противофазе с внешним воздействием [6–8] и др. Управление активными элементами осуществляется специальным контроллером по сигналам датчиков-акселерометров таким образом, чтобы минимизировать колебания подушки сиденья, на которой располагается оператор. Такие сиденья обеспечивают наиболее эффективное снижение вибраций, однако они дороги, имеют сложную конструкцию, в связи с этим потенциально менее надежны и пока не находят широкого применения.
Статья посвящена разработке математической модели системы «виброзащитное сиденье – оператор» промышленного трактора. При этом рассматривается виброзащитное сиденье фирмы Sibeco с пассивной системой подрессоривания, включающее пневматический упругий элемент. Исследованию характеристик таких сидений посвящены работы [9–12]. Получены характеристики упругого и демпфирующего элементов системы подрессоривания, соответствующие различным настройкам сиденья по массе водителя. В работах [12, 13] исследованы характеристики подушки сиденья и их влияние на подавление вибраций.
При описании динамики тела оператора, находящегося на виброзащитном сиденье, используются различные модели. В наиболее простом случае оператор моделируется одной сосредоточенной массой. Однако полученные при этом результаты зачастую отличаются от экспериментальных данных, полученных при стендовых и натурных испытаниях сиденья с оператором. В связи с этим необходимо использовать более сложные модели.
В ряде работ для описания динамики тела оператора используется конечноэлементная модель [3]. При этом модель может быть весьма подробной. Однако при ее разработке могут возникнуть трудности с определением свойств материалов, моделирующих тело человека, а проведение расчетов занимает большое время. В связи с отмеченным большое распространение получили модели, в которых тело человека описывается набором сосредоточенных масс, а также упругих и демпфирующих элементов. В настоящее время предложен ряд подобных моделей различной сложности, описывающих вертикальные колебания тела сидящего человека.
В наиболее простых моделях, использовавшихся в ранних исследованиях, тело человека по вертикали условно разделяется на две или три части и, соответственно, описывается двух- или трехмасcовыми расчетными схемами [14, 15]. Трехмассовая модель также представлена в стандарте ISO 5982 [16]. В настоящее время большее распространение получили модели, описывающие колебания нижней и верхней частей туловища, головы и внутренних органов. Расчетные схемы таких моделей, описывающих вертикальные колебания, представлены на рис. 1. Входное воздействие для представленных моделей – это вертикальное перемещение кресла; обобщенными координатами являются вертикальные перемещения масс.
Расчетная схема (рис. 1, a) включает нижнюю часть туловища (m2), верхнюю часть ( m 4), голову ( m 5) и внутренние органы( m 3) В работе [2] приведены параметры этой модели для человека массой 60,7 кг.
Схема (рис. 1, b) отличается отсутствием упругого и демпфирующего элементов ( c 6 и b 6 ). В [17] приведены параметры этой модели для человека массой 76 кг, в [2] – для человека массой 55,2 кг.
В модели (рис. 1, c) внутренние органы описываются двумя массами ( m 3 и m 6). В [18] представлены ее параметры для человека массой 72 кг.
Модель (рис. 1, d) описывает внутренние органы тремя массами ( m 3, m 31 и m 32). Верхняя часть туловища также разделена на две массы ( m 4 и m 41 ) [19].
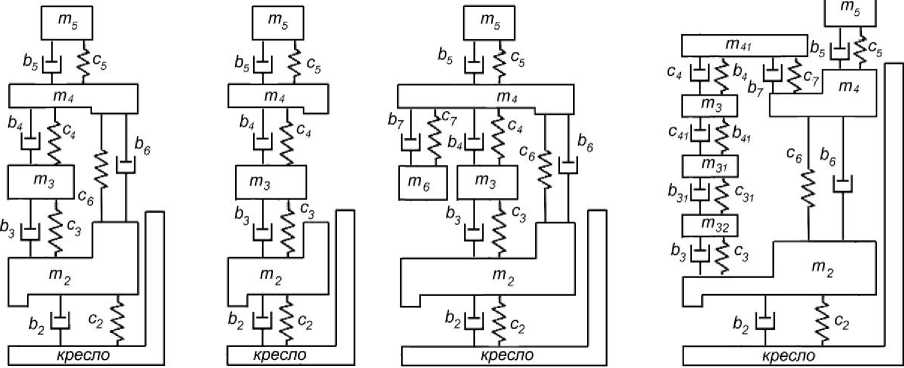
a) b) c) d)
Рис. 1. Расчетные схемы математических моделей сидящего человека Fig. 1. Calculation schemes for mathematical models of a sitting person
Параметры перечисленных моделей представлены в табл. 1. Анализ этих данных показывает, что параметры моделей, приводимые в работах разных авторов, существенно различаются даже при описании людей с близкой массой тела.
Представленное в статье исследование посвящено разработке математической модели, описывающей вертикальные колебания динамической системы «виброзащитное сиденье – человек-оператор». Для определения параметров модели использованы результаты испытаний на вибростенде сиденья с людьми различной массы. В статье приводится описание экспериментальной установки и методики проведения испытаний. Представлены параметры модели для операторов с различной массой тела.
Таблица 1 Параметры математических моделей сидящего человека
Table 1
Parameters of mathematical models of a sitting person
|
Параметры модели |
Масса оператора; расчетная схема модели (рис. 1) |
||||
|
55,2 кг; схема b |
60,1 кг; схема a |
72 кг; схема c |
76 кг; схема b |
81 кг; схема d |
|
|
m 2 , кг |
12,80 |
360 |
10,20 |
18 |
27 |
|
m 3 , кг |
8,60 |
5,50 |
9,0 |
12,2 |
1,4 |
|
m 31 , кг |
– |
– |
– |
– |
0,46 |
|
m 32 , кг |
– |
– |
– |
– |
6,02 |
|
m 4 , кг |
28,5 |
15 |
20,2 |
40,3 |
6,94 |
|
m41, кг |
– |
– |
28 |
– |
33,3 |
|
m 5 , кг |
5,31 |
4,17 |
5,8 |
5,5 |
5,6 |
|
m 6 , кг |
– |
– |
8,1 |
– |
6,02 |
Окончание табл. 1
Table 1 (end)
|
Параметры модели |
Масса оператора; расчетная схема модели (рис. 1) |
||||
|
55,2 кг; схема b |
60,1 кг; схема a |
72 кг; схема c |
76 кг; схема b |
81 кг; схема d |
|
|
c2, Н/м |
90000 |
49340 |
120100 |
21670 |
25500 |
|
c 3 , Н/м |
162800 |
20000 |
5300 |
17200 |
8940 |
|
c 31 , Н/м |
— |
— |
— |
— |
8940 |
|
c4, Н/м |
18300 |
10000 |
9150 |
309600 |
8940 |
|
c 41 , Н/м |
— |
— |
— |
— |
8940 |
|
c 5 , Н/м |
310000 |
134400 |
292000 |
5900 |
53640 |
|
c6, Н/м |
– |
– |
128200 |
– |
53640 |
|
c 7 , Н /м |
— |
— |
13172 |
— |
53640 |
|
b 2 , Н ⋅ c/м |
2060 |
2480 |
2375 |
500 |
378 |
|
b 3 , Н ⋅ c/м |
4580 |
330 |
677 |
1920 |
298 |
|
b 31 , Н ⋅ c/м |
– |
– |
– |
– |
298 |
|
b 4 , Н ⋅ c/м |
4750 |
200 |
1792 |
232 |
298 |
|
b 41 , Н ⋅ c/м |
– |
– |
– |
– |
298 |
|
b 5 , Н ⋅ c /м |
400 |
250 |
979 |
95 |
3651 |
|
b 6 , Н ⋅ c/м |
– |
909 |
4020 |
– |
3651 |
|
b 7 , Н ⋅ c/м |
– |
– |
144 |
– |
3651 |
Материалы и методы
Экспериментальные исследования динамики системы «виброзащитное сиденье – человек-оператор» проводились в Центре виброиспытаний и мониторинга состояния конструкций ЮжноУральского государственного университета. Экспериментальная установка включала следующую аппаратуру (рис. 2):
– электродинамический вибростенд LDS V850. Вибростенд имеет допустимую нагрузку на вибростол до 350 кг, обеспечивает толкающее усилие до 22 кН, частотный диапазон до 3 кГц и амплитуду виброускорений до 60g (при синусоидальной вибрации);
– систему управления для вибрационных испытаний Bruel&Kjaer VC-LAN 7542. В качестве датчика обратной связи используется пьезоэлектрический акселерометр PCB 352C04, установленный на подвижный стол вибростенда;
– акселерометры PCB 333B30, закрепленные на элементах виброзащитного сиденья и на теле оператора;
– управляющий персональный компьютер.
На подвижной платформе вибростенда установлены акселерометры обратной связи системы управления (Ду) и системы сбора данных (Дк). Акселерометр Д1 установлен на верхней платформе кресла под верхней подушкой. Акселерометр Д2 закреплен на специальном податливом диске, используемом в соответствии с ГОСТ [4] при виброиспытаниях сидений. Он находится на подушке сиденья под человеком-испытателем.
При размещении акселерометров непосредственно на испытателе необходимо обеспечить их неподвижность относительно тела. В связи с этим акселерометр Д4 был установлен на податливую пластиковую пластину, которая плотно привязывалась к груди испытателя. Акселерометр Д5 устанавливался на каске, которая плотно надевалась на голову. На рис. 3 представлена фотография установленного на стенд виброзащитного сиденья с испытателем.
Испытания проводились с участием группы добровольцев, имевших массу тела от 52 до 118 кг. В процессе испытаний использовалось гармоническое нагружение с постоянной амплитудой виброускорений и плавно изменяющейся частотой от 2 до 10 Гц. После обработки результатов были получены частотные передаточные функции, отображающие реакции различных эле- ментов динамической системы на единичное гармоническое воздействие со стороны нижней платформы сиденья, закрепленной на столе вибростенда. С каждым из испытателей эксперимент повторялся по три раза, результаты осреднялись.
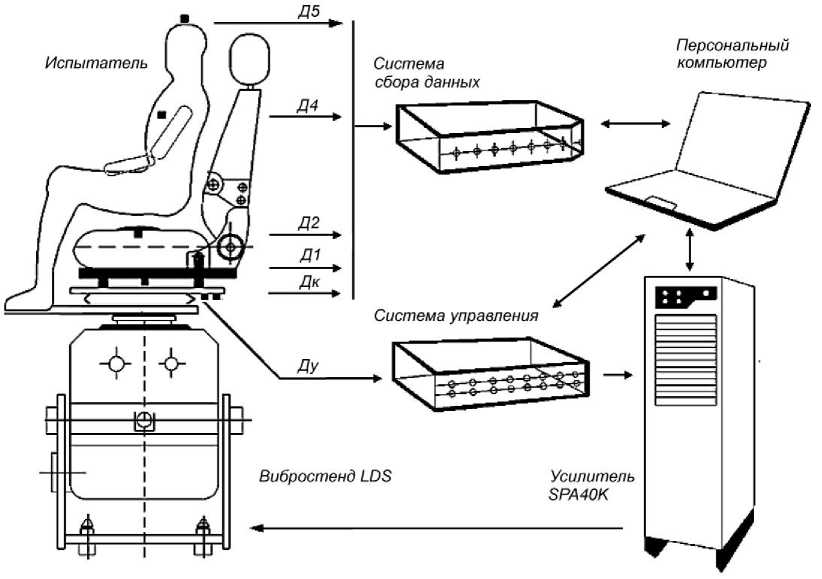
Рис. 2. Схема экспериментальной установки Fig. 2. Scheme of equipment for the experiment
Расчетная схема предложенной в данном исследовании математической модели приведена на рис. 4. Элементы m 1 , c 1 , b , b 1 , c 2 и b 2 описывают виброзащитное кресло. Масса m 1 соответствует верхней части сиденья, установленной на системе подрессоривания; для данного сиденья она равна 20 кг. Элементы c 1 , b , b 1 описывают систему подрессоривания. Последовательнопараллельная схема была обоснована в ходе ранее проведенных исследований. Следует отметить, что такая модель пригодна только для описания колебаний системы без учета постоянной составляющей нагрузки. Элементы c 2 , b 2 описывают подушку кресла. Параметры этих элементов для настроек кресла, соответствующих различной массе человека-оператора, приведены в [12].
Остальные элементы (массы m 2 – m 5 , упругие и демпфирующие элементы c 2 – c 6 , b 2 – b 6 ) соответствуют модели тела человека (см. рис. 1, а). Их значения для операторов различной массы предварительно были определены на основе анализа литературных данных. Входным кинематическим воздействием для модели является вертикальное перемещение основания x(t) , обобщенными координатами – вертикальные перемещения масс ( y 1 – y 6). Также введена дополнительная координата y 0 , соответствующая вертикальному перемещению точки соединения элементов c 1 и b . Динамика представленной математической модели описывается следующей системой дифференциальных уравнений:
b(yo -,У1) = ci(x-Уо), m1y1 = b(У0 - У1) + b1(x - y1) + c2(У2 - У1) + b2(y2 - yl), m2y2 = c2(У1 -У2) + b2(y1 -y2) + c3(У3 -У2) + b3(y3 -y2) + c6(У4 -У2) + b6(y4 -y2), m3У3 = c3(У2 -У3) + b3(У2 -У3) + c4(У4 -У3) + b4(У4 -У3), m4J>4 = c4(У3 -У4) + b4(У3 -У4) + c5(У5 -У4) + b5(У5 -У4) + c6(У2 -У4) + b6(У2 -У4), m5У5 = c5(У4 -У5) + b5(У4 -У5)•

Рис. 3. Испытатель на виброзащитном сиденье на вибростенде Fig. 3. Tester in a anti-vibration seat on a electrodynamic vibration bench
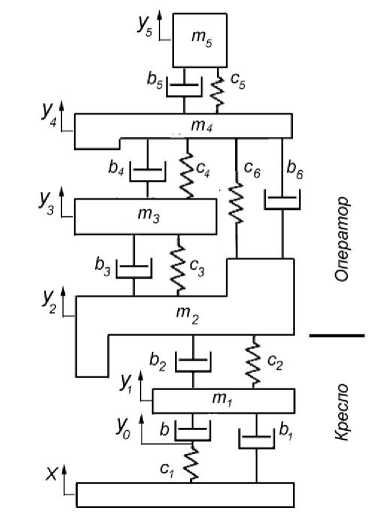
Рис. 4. Расчетная схема модели виброзащитного сиденья с оператором
Fig. 4. Calculation scheme of a model of a anti-vibration seat with an operator
После преобразований [20] из этих уравнений были получены выражения для частотных передаточных функций. В дальнейшем параметры элементов модели, описывающих тело человека, были уточнены для обеспечения наилучшего соответствия расчетных и экспериментальных данных.
Результаты и обсуждения
В качестве примера на рис. 5 представлены расчетные частотные передаточные функции для оператора с массой тела 73 кг. Там же приведены экспериментальные передаточные функции для координат y 1 , y 2 , y 4 , y 6 , полученные на основе сигналов акселерометров Дк, Д1, Д2, Д4 и Д5. Параметры модели для операторов с массой тела 52, 66, 73, 85 и 118 кг представлены в табл. 2.
В результате уточнения параметров элементов модели, описывающих тело оператора, удалось обеспечить достаточно хорошее соответствие расчетных и экспериментальных данных. Небольшие локальные всплески, присутствующие на экспериментальных передаточных функциях, по-видимому, вызваны резонансами отдельных элементов виброзащитного сиденья, не учитываемых в математической модели. Следует отметить существенное расхождение расчетной и экспериментальной передаточных функций для обобщенной координаты y 4 , соответствующей колебаниям верхней части тела оператора. По-видимому, это вызвано не вполне удачным размещением акселерометра Д4 (ближе к средней части туловища), а также недостаточно жесткой связью с телом испытателя.
Представленная в статье математическая модель будет использована в дальнейших исследованиях для получения расчетных оценок вибронагруженности рабочего места оператора промышленного гусеничного трактора. При этом могут быть проведены исследования для операторов с различной массой тела.
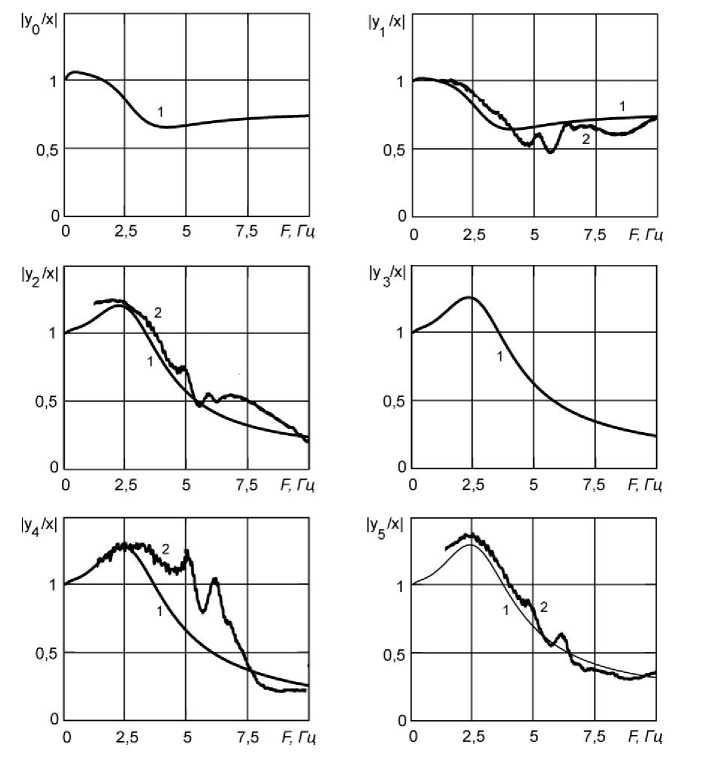
Рис. 5. Расчетные и экспериментальные передаточные функции для испытателя массой 73 кг;
1 – расчет, 2 – эксперимент
Fig. 5. Calculated and experimental transfer functions for a tester with a mass of 73 kg;
1 – calculation, 2 – experiment
Таблица 2
Параметры математической модели виброзащитного сиденья с оператором
Table 2
Parameters of the mathematical model of an anti-vibration seat with an operator
|
Параметры модели |
Масса оператора, кг |
||||
|
52 |
66 |
73 |
85 |
118 |
|
|
m1, кг |
20 |
20 |
20 |
20 |
20 |
|
m 2 , кг |
10,9 |
17,2 |
18,4 |
24,8 |
37 |
|
m3, кг |
11,5 |
11,2 |
12,4 |
13,7 |
16,7 |
|
m4, кг |
25 |
32,3 |
36,7 |
40,4 |
58 |
|
m 5 , кг |
4,6 |
5,3 |
5,5 |
6,1 |
6,3 |
|
c 1 , Н/м |
3100 |
3600 |
5218 |
5600 |
6070 |
|
c2, Н/м |
170000 |
195000 |
220000 |
230000 |
290000 |
|
c 3 , Н/м |
24320 |
18180 |
15100 |
9800 |
7600 |
|
c 4 , Н/м |
15200 |
10200 |
9100 |
8700 |
6300 |
|
c5, Н/м |
172360 |
111300 |
84410 |
52760 |
37820 |
|
c 6 , Н /м |
254000 |
166000 |
122400 |
111700 |
80600 |
|
b, Н ⋅ c/м |
1100 |
1800 |
2300 |
2800 |
3500 |
|
b1, Н ⋅ c/м |
950 |
1100 |
3200 |
3700 |
4300 |
|
b 2 , Н ⋅ c/м |
1100 |
1300 |
1500 |
16200 |
18100 |
Окончание табл. 2
Table 2 (end)
|
Параметры модели |
Масса оператора, кг |
||||
|
52 |
66 |
73 |
85 |
118 |
|
|
b 3 , Н ⋅ c/м |
4940 |
3180 |
2300 |
1300 |
780 |
|
b 4 , Н ⋅ c/м |
5270 |
2840 |
1620 |
790 |
220 |
|
b 5 , Н ⋅ c /м |
400 |
220 |
120 |
110 |
76 |
|
b 6 , Н ⋅ c/м |
4840 |
4267 |
3800 |
3400 |
2100 |
Список литературы Экспериментальные исследования и идентификация модели динамической системы «виброзащитное кресло - оператор» мобильной машины
- Bovenzi M., Hulshof C.T.J. An update review of epidemiologic studies on the relationship be-tween exposure to whole-body vibration and low back pain // Journal Sounds and Vibration. 1998. Vol. 215(4). P. 595–611. https://doi.org/10.1006/jsvi.1998.1598
- Szczepaniak J., Tanas W., Kromulski J. Vibration energy absorption in the whole-body system of a tractor operator // Annals of Agricultural and Environmental Medicine. 2014. Vol. 21(2). P. 399–402. https://doi.org/10.5604/1232-1966.1108612
- A finite element modeling-based approach to predict vibrations transmitted through different body segments of the operator within the workspace of a small tractor / N.C. Pradhan, P.K. Sahoo, D.K. Kushwaha et al. // Journal of Field Robotics. 2023. Vol. 40(6). P. 1543–1561. https://doi.org/ 10.1002/rob.22191
- ГОСТ 27259-2006 (ИСО 7096:2000). Вибрация. Лабораторный метод оценки вибрации, передаваемой через сиденье оператора машины. М.: Стандартинформ, 2008. 19 с.
- Duke M., Goss G. Investigation of tractor driver seat performance with non-linear stiffness and on-off damper // Biosystems Engineering. 2007. Vol. 96(4). P. 477–486. https://doi.org/10.1016/j.bio-systemseng.2007.01.005
- Al-Ashmori M., Wang X. A systematic literature review of various control techniques for active seat suspension systems // Applied Sciences. 2020. Vol. 10(3). P. 1148–1171. https://doi.org/10.3390/ app10031148
- Phu D.X. An J.H., Choi S.B. A novel adaptive PID controller with application to vibration control of a semi-active vehicle seat suspension // Applied Sciences. 2017. Vol. 7(10). P. 1055–1076. https://doi.org/10.3390/app7101055
- Обоснование технических решений устройств с рекуперацией энергии для виброзащиты оператора колесных и гусеничных машин / В.В. Шеховцов, А.И. Искалиев, П.В. Потапов и др. // Энерго- и ресурсосбережение: промышленность и транспорт. 2020. № 3. С. 25–32.
- Определение передаточной функции пневматической подвески сиденья на стенде-гидропульсаторе / М.В. Ляшенко, А.В. Поздеев, Д.А. Чумаков и др. // Тракторы и сельхозмашины. 2018. № 6. С. 53–57. DOI: 10.31992/0321-4443-2018-6-53-57
- Экспериментальные исследования для определения максимального коэффициента передачи сиденья / М.В. Ляшенко, В.В. Шеховцов, А.И. Искалиев и др. // Энерго- и ресурсосбережение: промышленность и транспорт. 2020. № 3. С. 19–25.
- Березин И.Я., Пронина Ю.О., Тараненко П.А. Экспериментальные исследования характеристик элементов виброзащиты рабочего места оператора промышленного трактора. // Тракторы и сельхозмашины. 2016. № 9. С. 19–22.
- Abyzov A.A., Pronina Y.O., Muhiddinzoda K.J. Experimental Study of the Dynamic Characteristics of the Anti-vibration Industrial Tractor Operator’s Seat // International Conference on Industrial Engineering (ICIE 2022). Lecture Notes in Mechanical Engineering. Springer. 2022. P. 421–430. DOI: 10.1007/978-3-031-14125-6_42
- Михайлов В.Г. Исследование, аппроксимация характеристик подушек сидений и их Влияние на вибронагруженность водителя ТС // Системный анализ и прикладная информатика. 2016. № 1. С. 51–59.
- Matsumoto Y., Griffin M.J. Mathematical models for the apparent masses of standing subjects exposed to vertical whole-body vibration // Journal of Sound and Vibration. 2003. Vol. 260(3). P. 431–451. http://dx.doi.org/10.1016/S0022-460X(02)00941-0
- Пановко Г.Я., Потемкин Б.А., Фролов К.В. Определение параметров моделей тела человека-оператора при вибрационном и ударном воздействиях // Машиноведение. 1972. № 3. С. 31–37.
- ISO 5982:2001. International Organization for Standardization. Mechanical Vibration and Shock: Range of Idealized Values to Characterize Seated-Body Biodynamic Response Under Vertical Vibration. International Organization for Standardization. 2002. 28 p.
- Absorbed power distribution in the whole-body system of a tractor operator / J. Kromulski, T. Pawlowski, J. Szczepaniak et al. // Annals of Agricultural and Environmental Medicine. 2016. Vol. 23(2). P. 373–378. https://doi.org/10.5604/12321966.1203908
- Zhao L., Yu Y., Cao J. Nonlinear coupled dynamic modelling of driver-seat-cab system and biomechanical behaviour prediction // Strojniski Vestnik – Journal of Mechanical Engineering. 2022. vol. 68 (2). P. 90–100. https://doi.org/10.5545/sv-jme.2021.7429
- Szczepaniak J., Pawłowski T., Kromulski J. Dynamic loads of whole operator’s body originating from the work of tractor mower set // Mechanization in agriculture & Conserving of the resources. 2013. Vol. 59(6). P. 28–31.
- Светлицкий В.А. Статистическая механика и теория надежности. М.: Изд-во МГТУ им. Н.Э.Баумана, 2004. 504 с.
