Экспериментальные исследования кинетических и динамических характеристик звеньев механизма (привод утюга)
")
Автор: Гусев Б.К., Пеленко В.В., Ширшиков А.М.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Математика и информатика
Статья в выпуске: 7, 2012 года.
Бесплатный доступ
В статье оценивается адекватность физической и математической моделей реальному процессу составлением значения координаты и скорости любого из звеньев механизма привода утюга. Исследователями установлено, что динамическое совершенствование механизма привода расфасовочно-упаковочных машин по удельным действиям позволяет системно подойти к оценке их качества, выбрать названия и пути совершенствования конструкции машин, снизить затраты.
Координаты, экспериментальная установка, амплитуда колебаний, погрешность результатов исследования, удельные затраты
Короткий адрес: https://sciup.org/14082522
IDR: 14082522 | УДК: 648.4:621.01.001
Experimental research of the kinetic and dynamic characteristics of the mechanism links (iron drive)
Adequateness of the physical and chemical models to the real process is estimated in the article by means of coordinate value construction and speed of any of the iron drive mechanism links. It is determined by the researchers that dynamic perfection of the weighing-and-packing machine drive mechanism on the specific actions allows to estimate their quality in a system, to choose the name and the ways to perfect the machine design; to reduce expenses.
Текст научной статьи Экспериментальные исследования кинетических и динамических характеристик звеньев механизма (привод утюга)
С целью обоснования перечня характеристик, определяемых экспериментально, в качестве обобщенных координат и скорости в математической модели механизма привода утюга приняты угловые координаты p и скорость p кулачка [1, 4-10].
Координаты и скорости звеньев механизма привода через обобщенные координаты p и ip выражаются следующим образом:
угловая координата и скорость коромысла a = в - arccos
L 2+ 1 2 — R2
2 Ll
;
da _______2R_______dR dp dt J4L212 -(L2 +12 -R2) dP dt ’ координата и скорость центра масс тяги (в проекциях на оси координат) X т = X 0 + IK cosa + ^lT cos в;
YT = Y + P sin a + —lT sin в;
T 0 K2
da1
VT = P sin a + lT sin P ;
TX dt K 2 dt T
, ■ da,1
V = P cos a + P cos P,
TY dt K 2 dt T , где
в
A, - lK sin a
— п - arcrg —— K ----;
C +1? cos a K dfi _ lK (lK - Ai sin a + C cos a) da dt (C + lK cosa )2 +(A1 - lK sin a )2 dt координата и скорость цепи, присоединенной к утюгу (координата и скорость утюга),
Н Ц — l Ц + lT
dH- _ 1
dt cos в
—
п „ С + 1? cos a 4Re +—;
-
2 cos в
de , . da,
{( C + lK cos a ) tge--lK sin a —};
K dt K dt координата и скорость пружины
H пр — Н пр о + ( Н ц о - Н ц );
dHпр dHЦ
-------—--.
dt dt
Исходя из полученных выражений, для оценки адекватности физической и математической моделей реальному процессу достаточно сопоставить расчетные и экспериментальные значения координаты и скорости любого из звеньев механизма привода утюга.
В качестве исследуемых звеньев выбраны коромысло и утюг. Причиной этому является невысокий уровень кинетических и динамических характеристик и технические возможности располагаемой измерительной системы
Описание экспериментальной установки и оценка погрешности результатов измерений
Для экспериментального определения характеристик звеньев была разработана экспериментальная установка, в состав которой входят исследуемый механизм (механизм привода утюга машины для упаковки гастрономических товаров в полиэтиленовую пленку МУГТ-700); комплект аппаратуры ВИ6-5МА с датчиками, закрепленными на звеньях исследуемого механизма (рис.1); шлейфный осциллограф НI-45; магазин сопротивлений. Роль контроля в данной системе выполняют датчики перемещения утюга и датчики ускорения ДУ-5.
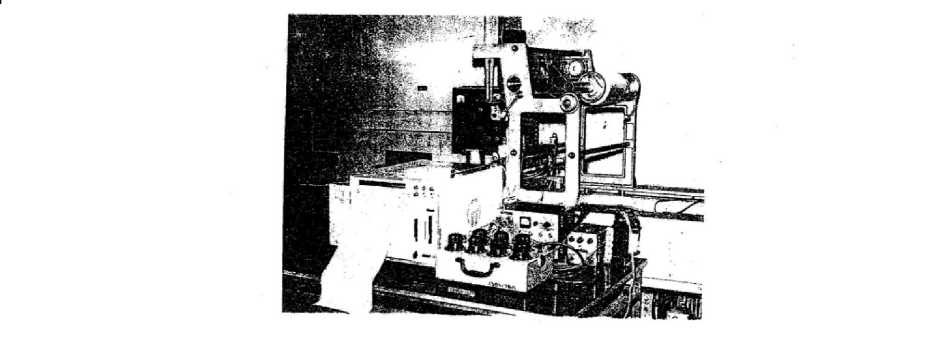
Рис. 1. Комплект аппаратуры ВИ6-5МА и шлейфного осциллографа НI-45
Датчик параметра перемещения утюга представляет собой датчик линейного перемещения на основе реостатного датчика.
Датчик параметра ускорения ДУ-5 является индуктивным преобразователем измеряемых механических величин в электрический сигнал. Схема и принцип действия датчика ускорения (построен на основе дифференциально-трансформаторной схемы) подробно рассмотрена в работе [2].
После обработки результатов измерений получены временные зависимости изменения скорости утюга, угловых координат и скорости коромысла.
Для работы датчиков, используемых в составе экспериментальной схемы, была снята их амплитудная характеристика cиспользованием экспериментальной тарировочной установки, которая состоит из вибрационного измерительного стенда ST-3000, устройства контроля величины перегрузки, аппаратуры ВИ6-5МА с датчиками ДУ-5, магазина сопротивлений и шлейфного осциллографа НI-45.
В состав вибрационного измерительного стенда ST-3000 входят пульт управления и вибрационный стол (оба элемента электрически связаны между собой).
По результатам расчетов определена частота колебаний исследуемого механизма равная 0,194 Гц.
Но тарировку датчиков на такой частоте осуществить практически невозможно, так как устойчивая работа вибростенда начинается на частоте от 20 Гц. Необходимо решить данную задачу.
Как известно, амплитуда колебаний равна
A = -W- 4 n2 f2
где W – величина перегрузки, м/с².
Задавая величину для перегрузки стола, при фиксированном значении частоты колебаний получаем величину амплитуды колебаний (табл. 1).
Зависимость амплитуды колебаний от величины перегрузки
Таблица 1
|
Параметр |
Значения |
|||
|
Перегрузка W , м /с² |
0,981 |
4,905 |
9,81 |
19,6 |
|
Амплитуда A , м ∙ 106 |
62,1 |
311,0 |
621,0 |
1242,0 |
Величина амплитуды колебаний вибрационного стола контролировалась микроскопом МИР-2 (длина тубуса микроскопа 1туб = 0,19 м , цена деления шкалы а = 3,6 - 10 - 5 м ).
На фотобумаге фиксировалось изменение величины амплитуды колебания датчиков в зависимости от значения перегрузки. На основании этих данных построены амплитудные характеристики датчиков (рис. 2).
Исходя из полученных данных, можно сделать вывод – полученные тарировочные зависимости так же будут справедливы и на частотах ниже 20 Гц. Таким образом, их можно использовать для определения истинных значений ускорений звеньев исследуемого механизма.
Рис. 2. Комплекс аппаратуры ВИ6-5МА и шлейфного осциллографа Н1-45. Определение величины погрешности результатов измерения
При проведении экспериментальных исследований использовались прямые и косвенные методы измерения.
При определении величины линейного перемещения утюга использовался прямой метод измерения (датчик - реостат). Витки датчика наматывались с шагом l = 2 мм при погрешности намотки A l = ± 0,1 мм.
В результате величина погрешности самого датчика (s Д) не превышала значения s = l + 2Al ^ 1oo%, ДH
где Н < 120 – рабочий диапазон измеряемой величины, мм. В результате получим s = 2 + 2 •0,1.100% = 1,9%.
Д 120
Учитывая, что случайная погрешность преобразователя (осциллографа) £ П не превышает 1%, а погрешность считывания информации £ С находится на уровне 2%. Суммарная погрешность определения величины составит.
s = л IS 2 + S 2 + s ,.2 = J (1,9 2 + 1 2 + 22) • IO - 4 • 100% = 2,9%. Н ДПС
Измерения линейных ускорений производились с использованием акселерометров – датчиков ускорения, входящих в комплект виброизмерительной аппаратуры ВИ6-5МА. Анализ устройства экспериментальной установки показывает, что погрешность измерения величины ускорения s W есть сумма погрешности задания перегрузки при тарировке s 3 , погрешности усилителя (ВИ6-5МА) s y , погрешности преобразователя £ П и погрешности считывания информации s c .
Величина s 3 определяется из известной функциональной зависимости
W = 4 п2 f 2 A .
с использованием следующего соотношения:
s3 = АА- + 4 f -100%.
-
З А 2 f 2
При количественной оценке величины s 3 необходимо учитывать, что нелинейный характер изменения закона тарировочной характеристики датчика начинает проявляться на частотах, близких к собственной частоте, которая составляет величину fc = 395 Гц . В рабочем диапазоне частот ( f Р = 0...20 Гц ) тари-ровочная характеристика имеет линейный характер. Для обеспечения удовлетворяющей точности задания величины перегрузки s 3 (учитывая, что A f- < 0,01 , значение f < 200 Гц , разрешающая способность отсчетного микроскопа МИР-2 не превышает 1,8 - 10 5 м ). Тарировочную зависимость следует определять при амплитудах колебаний А > 400 - 10 6 м . При этом величина погрешности £ 3 не превысит значения
£ 3 =
1,8 - 10 - 5 Л
\ ^ 400 - 10 - 6
+ 4 - 0,012 - 100% = 4,6%.
Таким образом, случайная составляющая погрешности измерения ускорения составит
£Ц

+ £У + £П + £С .
Учитывая, что £ У « s n , получим
£ Ц = Vc^e^Tl^n^T^^^To-^ - 100% = 5,2%.
Косвенные измерения перемещений и скоростей связаны с процессом графического дифференцирования и интегрирования, при этом погрешность интегрирования оценивается погрешностью определения площадей, которая не превышает 2%, а погрешность дифференцирования определяется погрешностью определения линейных дуговых координат, которая тоже не превышает 1,1%.
Сравнительный анализ результатов исследования
Полученные опытным путем кинематические характеристики звеньев механизма были сопоставлены с данными, полученными в процессе расчета на ЭВМ (рис. 3, 4).
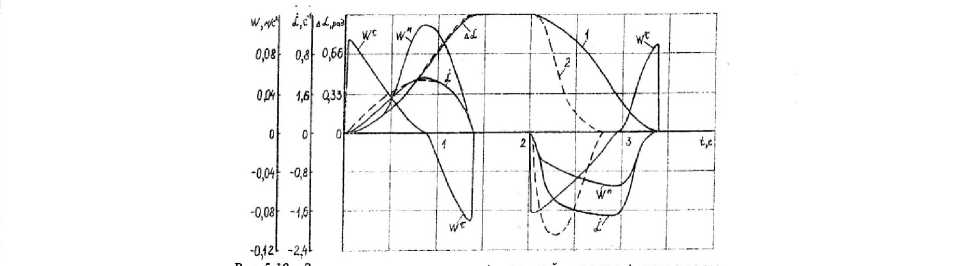
Рис. 3. Зависимости угла поворота Ла , угловой скорости а , нормального W" и тангенциального W Т ускорений коромысла по времени t : 1 – экспериментальные; 2 – расчетные
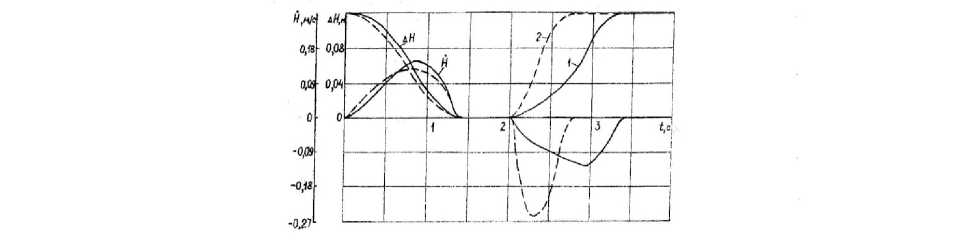
Рис. 4. Зависимость перемещения ∆ Н и скорости Н утюга по времени t : 1 – экспериментальные; 2 – расчетные
Так, на участке опускания утюга расхождения значений составили:
- угловой координаты коромысла α около 5%, что является вполне допустимым, а скорости d α – dt
25%, что превышает величину общепринятой инженерной точности (до 10%), однако также является допу- стимым для рассматриваемого параметра;
- координаты утюга НЦ – около 8%, скорости
dHЦ dt
– 28%, что удовлетворяет требованиям точности.
На участке подъема наблюдается несовпадение результатов теоретического исследования и практики. Это объясняется наличием прогиба балок каркаса машины в местах крепления щек опоры кулачкового механизма. В результате это приводит к замедлению движения звеньев механизма, и как следствие, процесс подъема утюга растягивается по времени. Данный процесс наблюдается на осциллограммах, снятых с датчиков ускорения коромысла и перемещения утюга.
Исследование динамических параметров механизма привода утюга посредством машинного эксперимента
Известно, что рассматриваемая машина предназначена для создания механической работы mW на перемещение S c требуемой скоростью. При этом ключевым удельным действием, отвечающим данной цели, является удельное действие по Кориолису-Понселе (функцией для интегрирования является мощность Q , • ф\ )■
При исследовании и оптимизации механизмов с высшими кинематическими парами (в рассматриваемом механизме такой является пара «кулачок-ролик») целесообразно также использовать локальный критерий по Герцу (функцией для интегрирования является контактное напряжение в высшей паре а К )■
При динамическом совершенствовании механизма привода утюга необходимо уменьшить удельное действие по Кориолису-Понселе и Герцу с возможным уменьшением всех других удельных действий. В крайнем случае, допускается незначительное их увеличение.
Для определения направлений динамического совершенствования рассматриваемого механизма привода был произведен численный эксперимент с использованием ЭВМ. В качестве исследуемых механизмов рассматривались однотипные механизмы с различными параметрами звеньев.
Формирование исходных данных для исследования механизмов
В качестве первого варианта рассматривался механизм, применяемый на серийно выпускаемой машине. Габаритно-массовые характеристики данного механизма приведены в [3].
Анализируя выражения удельных действий, можно сделать вывод о том, что их уменьшение возможно достичь благодаря выполнению следующих условий:
-
1) уменьшением параметров кинематических и динамических характеристик звеньев механизма;
-
2) уменьшением параметров габаритно-массовых характеристик;
-
3) одновременно уменьшением параметров и тех и других характеристик.
Для уменьшения параметров кинематических и динамических характеристик необходимо, как правило, увеличивать как габаритные, так и массовые характеристики. Этот вывод следует из анализа операторов передачи движения и решения дифференциального уравнения движения.
Для проверки данных рассуждений были составлены варианты механизма, отличные от первого исходного.
Во втором варианте рассматривался механизм, отличие которого от первого заключается в следующем:
увеличены:
-
- момент инерции коромысла J кор = 5,95 - 10 - 3 кгм 2;
-
- масса коромысла ткор = 0,64 кг ;
-
- сила тяжести коромысла Ркор = 6,28 Н ;
-
- масса цепи тЦ = 0,174 кг ;
-
- сила тяжести цепи Р = 1,71 Н ;
-
- длина малого и большого плеча коромысла соответственно
1 мал.к = 0,08 М ; 1 б ОЛ , к = 0,258 м ;
-
- длина цепи 1ц = 0,257 м ;
-
- расстояние между осями вращения кулачка и коромысла
L = 0,137 м ;
-
- расстояние между осями вращения коромысла и звездочки (по оси абсцисс) С = 0,994 м ;
-
- радиус центра тяжести коромысла
-
- угол между осью «кулачок-коромысло» и осью кординат 8 = 1,14 рад ;
уменьшены:
-
- расстояние между осями вращения коромысла и звездочки (по оси ординат) А = 0,198.1 / ;
-
- расстояние от оси кулачка до оси абсцисс
-
- расстояние между осями вращения кулачка и коромысла по оси ординат а = 0,041 м .
Третий вариант отличается от второго только тем, что в нем уменьшены инерционно-массовые параметры J кор = 3,04 - 10 — 3 кгм 2:
-
- масса до ткор = 0,32 кг ;
-
- сила тяжести до Ркор = 3,14 Н .
Четвертый вариант является симбиозом первого и третьего вариантов.
Масса mЦ , сила тяжести РЦ и длина цепи l ц , а также расстояние между осями вращения коромысла и звездочки А взяты такими же, как и в первом варианте, а остальные параметры – как в третьем. Отличие от третьего варианта заключается в том, что уменьшены следующие параметры:
-
- момент инерции тяги J Т = 2,04 - 10 - 3 кгм 2;
-
- масса тяги mT = 0,223 кг ;
-
- сила тяжести Р Т = 2,19 Н ;
-
- длина тяги 1т = 0,331 м ;
-
- расстояние между осями вращения коромысла и звездочки (по оси абсцисс) С = 0,454 м ;
-
- расстояние от оси вращения коромысла до оси абсцисс d = 0,155 м .
Результаты проведенных расчетов для различных вариантов механизма привода утюга приведены ниже.
Оценка результатов машинного эксперимента
На основании данных расчетов были построены зависимости изменения удельных затрат для различных критериальных действий, что отражено на рисунках 5, 7, 8. Представленные зависимости отражают суммарные затраты ( S ) , тяги ( Т ) , цепи ( Ц ) , утюга ( У ) и пружины ( П ) . Суммарные затраты приведены без учета затрат привода. Это сделано для упрощения количественного анализа. Исключения из рассмотрения в каждом варианте одинакового элемента (электродвигателя) позволяют существенно сместить начало отсчета сравнения и значительно изменить его масштаб, что, в свою очередь, существенно улучшает наглядность. В качестве базового варианта, относительно затрат которого построены зависимости, был принят первый вариант механизма привода утюга.
На рисунке 5 приведены зависимости изменения величины удельных затрат для критериальных действий по Кориолису-Понселе К К - П (ключевое удельное действие), Виттенбауэру К В , Буридану К Б , импульсу К ИМ и локальному критерию по Гауссу КГс . Относительные удельные затраты по этим критериям представлены в таблице 2. Относительные затраты вычисляются по следующему выражению:
nб
£" кш = -100%, шб
Кi где Кin,Kiб – i-е удельные затраты для n-го и базового вариантов соответственно.
Анализ полученных зависимостей (см. рис. 5 и табл. 2) показывает, что лучшим из рассматриваемых вариантов механизма привода утюга является четвертый вариант.
Таблица 2
|
Относительные затраты |
По Кориолису-Понселе, Виттенбауэру, Буридану, импульсу и Герцу, по вариантам £ nK i ,% |
|||
|
Базовый |
II |
III |
IV |
|
|
КК - П , Нм; |
38,3 |
4,4 |
3,9 |
-1,7 |
|
К , Нм; В |
4256 |
4,6 |
4,1 |
-1,6 |
|
К , Нмс Б |
30,2 |
4,6 |
4,0 |
-1,7 |
|
К ИМ , Нмс |
29,2 |
4,7 |
4,0 |
-1,7 |
|
КГс , Нс/м² |
39,3·108 |
-1,3 |
-1,5 |
-1,9 |
Относительные удельные затраты по Кориолису-Понселе, Виттенбауэру, Буридану, импульсу и Герцу
Как уже отмечалось, в качестве функции интегрирования в локальном критерии по Герцу используется контактное напряжение в высшей паре. На рисунке 6 представлены зависимости изменения величины контактного напряжения в паре «кулачок-ролик» от времени для различных вариантов механизма привода утюга. Анализ представленных зависимостей показывает, что научно обоснованное изменение конструктивных характеристик приводит к уменьшению величины максимального контактного напряжения ( а К ) MAX . В четвертом варианте а КМАХ уменьшается на 11,7% по сравнению с базовым вариантом. Это приводит к тому, что соответственно изменяются требования к качеству обработки рабочей поверхности кулачка и появляется возможность использовать более дешевые материалы, из которых он выполнен.
В таблице 3 представлены относительные удельные затраты по Гауссу для коромысла К Гс КОР , тя-
Т Ц К+Т+Ц S ги КГс , цепи КГс , а также суммарные затраты этих трех звеньев КГс и всей машины КГс , а также удельные затраты по Аппелю, Декарту, Лагранжу и Эйлеру. Анализ параметров полученных зависимостей (рис. 6) и данных таблицы 3 показывает, что несмотря на увеличение затрат для коромысла, во всех вариантах (II, III, IV) лучшим по суммарным затратам из рассматриваемых вариантов является четвертый вариант механизма привода утюга.
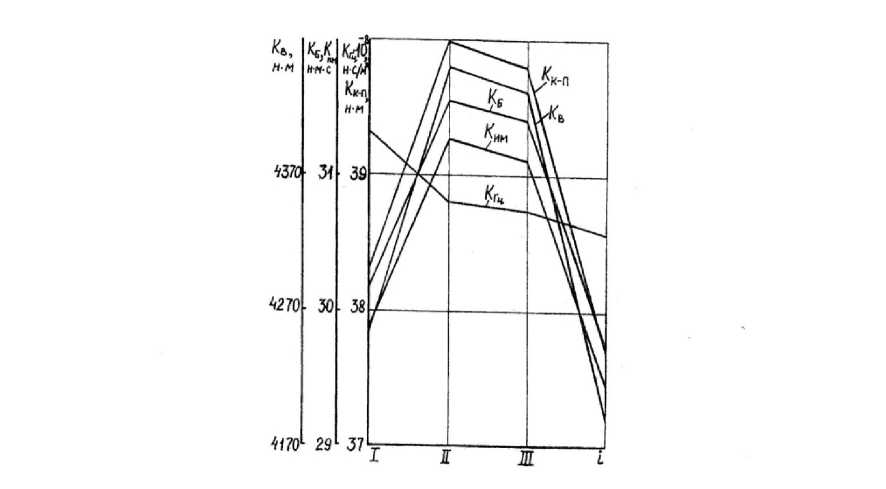
Рис. 5. Удельные затраты по Кориолису-Понселе, Виттенбауэру, Буридану, импульсу и Герцу для различных вариантов механизма привода утюга
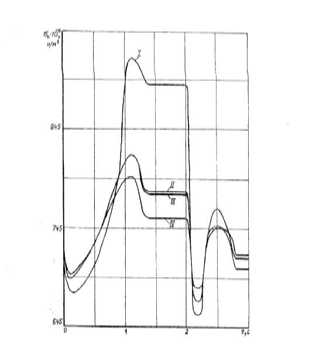
Рис. 6. Зависимости контактного напряжения а К в паре «кулачок-ролик» по времени t для различных вариантов механизма привода утюга
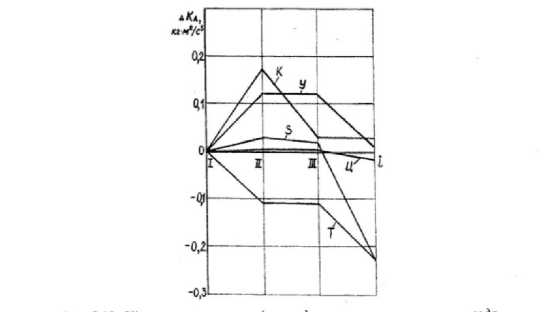
Рис. 7. Удельные затраты по Гауссу для различных вариантов механизма
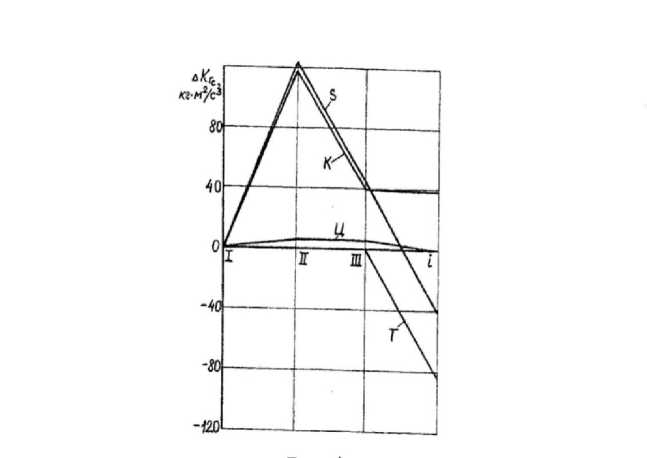
Рис. 8. Удельные затраты по Аппелю для различных вариантов привода утюга
На рисунке 8 изображены зависимости абсолютных разностей удельных затрат по Аппелю КА (значения удельных затрат для коромысла увеличены в десять раз), а на рисунке 9 изображены зависимости абсолютных разностей удельных затрать по Декарту Кд. Относительные значения величин затрат по этим критериям помещены в таблице 3.
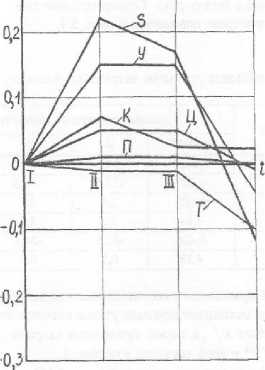
Рис. 9. Удельные затраты по Декарту для различных вариантов механизма привода утюга
Таблица 3
Относительные удельные затраты по Гауссу, Аппелю, Декарту, Лагранжу и Эйлеру
|
Обозначение, кг ∙ м/с3 |
Удельные затраты по вариантам s nK i ,% |
|||
|
По Гауссу |
||||
|
КОР К Гс |
39,6 |
300 |
100 |
100 |
|
КГсТ |
140 |
0 |
0 |
-60,4 |
|
КГсЦ |
37,4 |
16 |
16 |
-0,3 |
|
К + Т + Ц К Гс |
217 |
57,7 |
21,1 |
-20,7 |
|
КГсS |
3813 |
3,3 |
1,2 |
-1,1 |
|
По Аппелю |
||||
|
кор КА |
0,0124 |
141 |
23,4 |
23,4 |
|
КАТ |
0,309 |
-35,6 |
-35,6 |
-73,7 |
|
КАЦ |
0,105 |
2,8 |
2,8 |
-0,5 |
|
КА У |
3,84 |
3,1 |
3,1 |
0,3 |
|
К + Т + Ц К А |
0,426 |
-20,9 |
-24,4 |
-54,9 |
|
К АS |
4,38 |
0,7 |
0,5 |
-5,2 |
|
По Декарту |
||||
|
кор К Д |
0,0227 |
93,8 |
||
|
К ДТ |
0,164 |
-7,3 |
-7,3 |
-64,4 |
|
К ДЦ |
0,0226 |
22,1 |
21,7 |
-5,3 |
|
К ДУ |
3,18 |
4,7 |
4,7 |
-1,2 |
|
КД Пр |
0,0244 |
4,5 |
4,5 |
-1,2 |
|
т- К + Т + Ц КД |
0,209 |
30,1 |
8,1 |
-40,7 |
|
К ДS |
3,64 |
6,0 |
4,7 |
-3,3 |
Окончание табл. 3
|
Обозначение, Нмс |
Относительные удельные затраты |
|||
|
Базовый |
II |
III |
IV |
|
|
По Лагранжу |
||||
|
КОР К Л |
0,0007 |
171 |
42,8 |
28,6 |
|
КЛТ |
0,0118 |
0 |
0 |
-61,9 |
|
КЛЦ |
0,0026 |
38,5 |
38,5 |
15,4 |
|
К ЛУ |
0,25 |
4,8 |
4,8 |
-1,2 |
|
К + Т + Ц К Л |
0,0149 |
24,2 |
17,4 |
-36,2 |
|
КЛS |
0,287 |
5,2 |
4,9 |
-3,1 |
|
По Эйлеру |
||||
|
КОР К Э |
0,112 |
257 |
79,5 |
79,5 |
|
К ЭТ |
0,106 |
27,4 |
27,4 |
-52,8 |
|
КЭЦ |
0,278 |
13,7 |
13,7 |
0 |
|
тг К + Т + Ц К Э |
0,496 |
71,6 |
31,4 |
6,6 |
|
КЭS |
59,5 |
0,7 |
0,3 |
0,1 |
Полученные зависимости динамики изменений абсолютных разностей удельных затрат по названным критериям приведены на рисунках 10, 11 и в таблице 3. Их анализ показывает, что лучшим по удельным затратам по Лагранжу является четвертый вариант, а по Эйлеру – базовый вариант. Причем затраты в четвертом варианте практически не изменяются.
Сравнительный анализ результатов проведенных расчетов для рассматриваемых вариантов механизма привода утюга показывают, что лучшим вариантом также является четвертый. Удельные затраты данного варианта соответственно уменьшаются по:
-
- Кориолису-Понселе на 1,7%;
-
- Виттенбауэру на 1,6%;
-
- Буридану на 1,7%;
-
- импульсу на 1,7%;
-
- Герцу на 1,9% (при этом максимальное значение контактного напряжения о К МАХ в высшей паре «кулачок-ролик» уменьшается на 11,7%);
-
- Гауссу на 1,1%;
-
- Аппелю на 5,2%;
-
- Декарту на 3,3 %;
-
- Лагранжу на 3,1%.
Физический смысл полученных результатов состоит в следующем. Например, уменьшение удельного действия по Гауссу показывает, насколько полно механическая система преобразует действие активных сил в движение и наоборот. При этом уменьшаются затраты на преодоление сил сопротивления, снижается энергоемкость, увеличивается износостойкость звеньев и повышается надежность системы.
Уменьшение удельных действий по Аппелю снижает напряженность динамического режима механической системы. При этом уменьшается действие сил инерции, снижаются шум, вибрация и энергоемкость системы.
Уменьшение удельных действий по Лагранжу и Декарту дает возможность уменьшить массу системы, снизить скорости ее элементов, что также ведет к снижению энергетических затрат.
Уменьшение удельных действий по Буридану и импульсу позволяет уменьшить внутренние усилия в подвижных и неподвижных звеньях механической системы, что влечет за собой снижение потерь на трение, а в последующих прочностных расчетах позволяет добиться уменьшения материалоемкости.
Уменьшение удельных действий по Кориолису-Понселе и Виттенбауэру приводит к снижению затрат на преодоление сил сопротивления и инерции звеньев. При этом повышается КПД системы за счет снижения энергетических затрат.
Уменьшение локального критерия по Герцу подтверждает факт снижения усилий в высшей паре и как следствие – уменьшение контактных напряжений. В результате появляется возможность снизить материалоемкость элементов пары, а также выполнить требования по качеству обработки контактируемых поверхностей и их износостойкости. А это обеспечивает как повышение надежности и долговечности, так и снижение затрат энергии в системе.
Из проведенного анализа можно сделать вывод о том, что динамическое совершенствование механизмов привода расфасовочно-упаковочных машин по удельным действиям позволяет:
-
а) системно подойти к оценке их качества;
-
б) выбрать направления и пути совершенствования конструкции машины;
-
в) значительно снизить затраты механических средств на функционирование машины (в том числе и на ее энергоемкость).
Оптимизация технических систем по совокупности различных критериев (конструктивные, динамические, удельные действия) позволяет улучшить технические и экономические критерии на 30…45% [2]. Динамическое совершенствование механических систем по удельным действиям составляет треть от общих результатов
Рис. 10. Удельные затраты по Лагранжу для различных вариантов механизма привода утюга
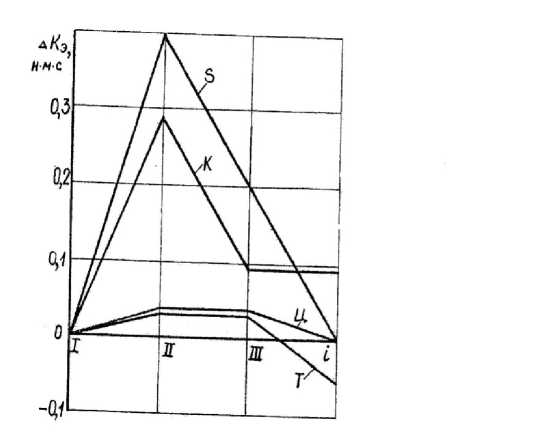
Рис. 11. Удельные затраты по Эйлеру для различных вариантов механизма привода утюга
Выводы
-
1. По точности составленные модели (физическая и математическая) механизма привода утюга достаточны для использования в практической работе при расчетах и конструировании машин данного типа.
-
2. Динамическое совершенствование механизмов привода расфасовочно-упаковочных машин по удельным действиям позволяет:
-
а) системно подойти к оценке их качества;
-
б) выбрать направления и пути совершенствования конструкции машины;
-
в) значительно снизить затраты механических средств на функционирование машины (в том числе и на ее энергоемкость).
