Элементы искусственного интеллекта в коррекции отклонений летательного аппарата от программы заданного маршрута

Автор: Шутов А.Б.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 8 (107), 2025 года.
Бесплатный доступ
Предлагаемая в данной работе булева противоречивых зависимостей в показателях долевых тенденций дает возможность применить поэтапный подход в коррекции отклонений активных и пассивных накопительных структур. Функции управления в программном и реальном планах полета представлены характеристики сопряжения долевых тенденций полученных из гармоник различных иерархических уровней временного ряда. Аналогово-цифровое преобразование данных показателей делает возможным применение элементов самокоррекции в задаваемых программах автоматизированных устройств.
Летательный аппарат, запрограммированный маршрут, адаптивные самокоррекции, долевые тенденции, элементы обратной связи, противоречивые зависимости, сопряжения, аналого-цифровые преобразователи
Короткий адрес: https://sciup.org/170210877
IDR: 170210877 | DOI: 10.24412/2500-1000-2025-8-191-197
Elements of artificial intelligence in correction of the flight aid's deviations from the set program of the route
The Boolean contradictory dependencies proposed in this work in the indicators of share trends make it possible to apply a step-by-step approach in the correction of deviations of active and passive accumulative structures. Control functions in the software and real flight plans are presented characteristics of conjugation of share trends obtained from the harmonics of different hierarchical levels of the time series. Analog-to-digital conversion of indicator data makes it possible to use selfcorrection elements in automated programs.
Текст научной статьи Элементы искусственного интеллекта в коррекции отклонений летательного аппарата от программы заданного маршрута
Развитие искусственного интеллекта (ИИ) сильно изменило представления людей о цифровизации. Под искусственным интеллектом может пониматься как научное направление, так и различные устройства, способные к рефлексии и моделирующие человеческий интеллект. Трактовка представлений о том, что такое разум и что есть познание применительно к человеческому сознанию, дает возможность постановки проблемы воссоздания искусственного интеллекта. Проблема разграничения сильного и слабого ИИ создает технологические этапы конструирования и сравнительные испытания на подобия интеллекта животных и человека [1, 2].
Индуктивный метод умозаключения на основе анализа и метод дедуктивного логического пути от общего к частному, переданные ИИ дают ему способность в получении, накоплении и оперировании новыми знаниями в различных научных областях. Выбранный человечеством технократический путь развития предполагает прогноз возможности в будущем вытесние роботами человека, как менее эффективную и менее рентабельную «модель» в познании мироздания [3].
В настоящее время во многих странах мира разработкам в области искусственного интеллекта (ИИ) отдается приоритет. На данный момент «США и КНР доминируют в этом направлении. Усиление связей Китая с Израилем, Великобританией, Германией и другими странами, к середине 2019 г., способствовало созданию более 240 зарубежных исследовательских учреждений [4].
Наиболее активно ИИ внедряется в беспилотные летательные аппараты (БПЛА) различного назначения: в сельском хозяйстве, помощь при чрезвычайных ситуациях, исследования земных и морских глубин, освоение космоса. Являются БПЛА, также, неотъемлемой частью вооруженных сил многих стран мира. Анализ текущего состояния прогресса стран, которые занимаются серьезной разработкой БПЛА, четыре: Россия, США, Китай и Израиль. Новейшие разработки США в этой области направлены на повышение потенциала ИИ в управлении БПЛА. Китай упорно ведет разработку своих БПЛА, но ориентируется на разработки других стран [5].
Для создания самоуправляемых БПЛА, безусловно, необходимо создание инструментов искусственного интеллекта (ИИ). Создание модели ИИ интегрирует знания многих научных отраслей, но основным методом является математическое моделирование [6]. Разделение летательных аппаратов на управляемые и частично управляемые предъявляет особые требования к системам управления, где особое внимание должно обращаться на устройства в обратимой аналогово- цифровой переработке информации [7].
При прохождении БПЛА по маршруту, воздействия на ЛА могут быть: системными, многократными, однократными и случайными [8]. Внешние воздействия на объект управления ЛА требуют создания особых методов самоконтроля текущего состояния объекта управления (рис. 1), которые представляют собой особые преобразующие устройства по кодированию отклонений [9], которые могут так же представлять некоторые двоичные функции зависимых высказываний [10].
Запрограммированный ЛА, обладающий инструментами самокоррекции, представляет собой «черный ящик» с входом и выходом [11]. Входом могут быть различные фак- торы внешней среды, которые система само-коррекции через датчики должна регистрировать. Выходом же будут параметры саморегуляции отклонений от заданного маршрута [12].
Формирование кодов внутрисистемных отклонений, возникающих на внешние воздействия (рис. 1), по каналам обратной связи (ОС) от объектов управления должны передаваться в центр системы управления для переработки информации и дальнейшей коррекции отклонений управляющего устройства от маршрута [13, 12].

Рис. 1. Прямая и обратная связь в схеме автоматизации
Для сравнения влияний внешних воздействий на открытую биологическую систему (или систему ИИ), чаще используются испытания на фоне действующих контрольных моделей. Где полученный результат исследований является больше продуктом статистики, который предполагается изучать по отличительным показателям контроля и опыта [10]. Результаты экспериментов могут обрабатываться так же симплекс методом, методом крутого восхождения [14] и другими методами достоверных отличий, при условии замены нулевого значения показателя динамики виртуальным числом [15].
Таким образом, в неизвестной вероятностной среде, поведение автоматизированных систем управления должны быть максимально приближено к алгоритмам управления биологических объектов [16].
Для создания модели самоуправляемых аппаратов необходимо знать, какие информационные элементы и принципы непрерывной коррекции управления внутренними системами организма лежат в оценке простых и комплексных внешних воздействий [17]. В самоуправлении элементы ОС функционально связаны с регуляцией гомеостатического равновесия и образуют в природе иерархию способностей «биологического интеллекта» для простых и сложных систем организмов [18].
В адаптивных реакциях гомеостатического равновесия организма во время спортивной подготовки показатели ОС многомерны и много-параметричны [19]. Антагонизм в регуляции работы различных органов и систем на основе высказываний и зависимых противоречий предполагает селективный отбор доминирующего регулятора [20]. Сигналы, идущие по каналам обратной связи, образуют так же череду циклически возрастающих или циклически убывающих адаптивных показателей накопительного итога [21].
Пример циклической регуляции сложных зависимостей заложен в гармонических рядах кардиоинтервалограммы (КИГ) сердечного ритма, которые представляют многоуровневую иерархию в адаптивной регуляции на факторы внешних воздействий [17]. Гармоники многолики и в системном управлении организма они отражают роль симпатических и парасимпатических центров управления [21]. Ряд гармоники, в отличие от показателей временного ряда, содержит долевые тенденции (ДТ), которые выявляют доли взаимозависимых регуляций различных систем [22]. ДТ и другие элементы ОС в простых и сложных биологических организмах на определенном временном интервале способствуют селективному отбору доминирующих регуляторов, которые корректируют уровень адаптации органов и систем на воздействия [23].
В медицине [24], иногда, ответную реакцию некоторой системы организма на определённый раздражитель (воздействие) представляют как явление гистерезиса, в котором инерционность поведения системы организма обозначают как ее монотонное сопротивление [25]. Однако, в физиологии и медицине петлю гистерезиса нельзя использовать для определения поведения системы. Если в физике петля гистерезиса представляет ответ материальной структуры на внешнее воздействие, что позволяет определить изменение ее состояния амортизационного износа. То в организме на воздействия любого раздражителя запускает селективный отбор доминирующих регуляторов, которые создают условия для обеспечения регуляций гомеостатического равновесия различных процессов [19, 17].
На рисунке 2 представлена модель, которая может быть применима и для коррекции маршрута автоматизированных устройств [4, 8, 16]. Где: показатель W 0 – представляет заданные программные значения; W – устройство выработки управляемых сигналов; ℇ – булевы структур зависимых активных и пассивных переменных; Z и X – зависимые двоичные функции 22 от n переменных; V – неконтролируемые внешние воздействия; Y – измененные функциональные координаты управления; ΔW – разность несовпадения управляемых сигналов [18].
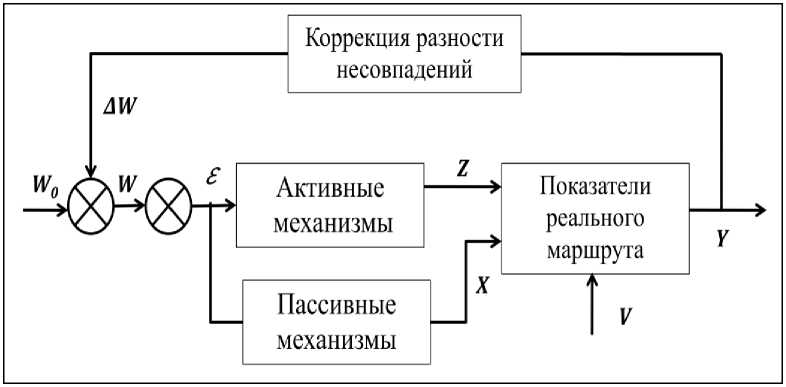
Рис. 2. Элементы обратной связи в коррекции отклонений
В организме, на весах противоречивых зависимостей, (в отличие от весов противоречивых значений [9]), создаются условия для селективного отбора тех долевых метрик адаптивных реакций, которые наиболее точно соответствуют выживанию организма в окружающей среде [23].
Так же природа придумала биоритмы, цикличность которых имеет от изолинии фазы подъема и снижения. Адаптивные структуры биоритмов зависят от структур внешних воздействий [22]. Это позволяют организму переходить от сна к бодрствованию, при этом, ускоряется или замедляется активность различных отделов вегетативной нервной системы. Деревья осенью сбрасывают листья, звери утепляют свои шубки, а холоднокровные впадают в зимнюю спячку [20]. Таким образом, структуры итогового накопления вариаций воздействующего фактора формируют в организме новые, защитные структуры гомеостатического равновесия [19].
Каким же образом создаются условия для селективного отбора тех или иных структур биоритмов? Показатели долевой тенденции в динамике выделенных в отдельные ряды амплитуд (рис. 3; А, В, С, Д), как амплитуд положительных рядов (А), так и амплитуд отрицательных рядов (В), могут иметь активные
(C) или пассивные (D) накопительные тенденции (рис. 4). Доли амплитудных приростов (p i ) , если их суммировать (p i + p i+1 ) , в динамике ряда могут принимать структурные формы активного или пассивного накопительного итога (рис. 4). В системе координат эти две формы долевой тенденции (ДТ) будут принимать противоречивые зависимости по отношению к показателям динамического стандарта [26].
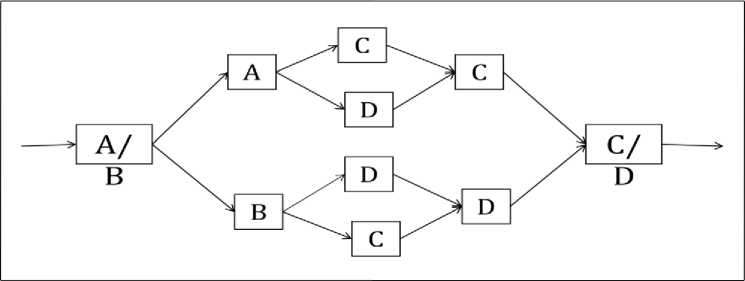
Рис. 3. Значения двоичной функции от двоичных переменных Показатели вариаций прироста: А – возрастающие, В – убывающие. Вариационное накопление: С – активное, D – пассивное.
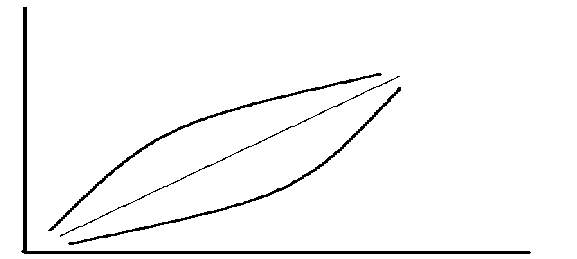
Рис. 4. Структура вариационного накопления:
(прямая – динамический стандарт , выпуклая дуга – активная форма (С) , прогнутая дуга – пассивная форма (D) )
Амплитудные приросты между показателями этих рядов образуют двойственные числа (рис. 5). Они являются одновременно и количественными, и порядковыми, где «количество» замкнуто на пространство, а «порядок» - на время [27].
Расстояние между моментными точками (а,б) и (б,с), в метрике двумерного простран- ства (рис. 5), будут представлять сопряженную зависимость. А убывающие – А и возрастающие – Б амплитудные различия в гармонике временного ряда будут отражать сопряженное противоречие внутрисистемных взаимодействий [26].
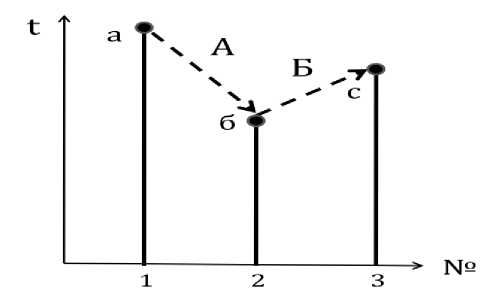
Рис. 5. Весы противоречивых зависимостей
Двоичные показатели возрастающих (Б + ) и убывающих (А–) приращений на графике (рис. 5) могут характеризовать накопительную структуру вариационной изменчивости в динамике какого-либо процесса. В сложных саморегулирующихся системах активные ( C ) и пассивные ( D ) формы накопительного итога (рис. 4) на принципах антагонизма осуществляют контроль за активностью тех или иных функциональных структур [28]. Таким образом, точки а,б,с -представляют показатели временного ряда, А- и Б + - зависимые интервалы гармоник, Си D - структуры накопительного итога в интервалах гармоник. Следует предположить, что между моментными точками, вариационными приращениями и структурами тенденций накопительного итога существует сопряженное, взаимозависимое влияние a,6,c^A,B^C,D [23, 26, 28]. Приведенные ниже примеры исследований в этой работе выявляют данную зависимость между иерархическими структурами.
Перенос элементов ОС, созданных в природе, на автоматизированные элементы ОС систем с ИИ дает возможность повысить способность систем автоматизации самостоятельно осуществлять коррекцию отклонений в заданном маршруте. В схемах автоматизации динамика ряда показателей плана маршрута, также как и для биологических объектов, представляет временной ряд, который так же имеет интервальные значения гармоник (рис. 5).
Введение чисел долевого участия (ДУ) для различных гармонических тенденций создает единую метрику для планируемых рядов маршрута БПЛА. Где каждый пространственно-временной показатель ряда в трехмерном пространстве будет отражать сопряженные долевые зависимости между показателями управляющих механизмов (моторов, закрылок, винтов, аккумуляторов, карбюраторов, стабилизаторов и т.п.).
Аналогом системам запрограммированного ЛА (ЗЛА) с встроенными элементами ИИ, на сегодня выступают системы навигационных спутников третьего поколения. Однако, практика показала, что системы навигации оказываются неспособны давать точную ориентировку в условиях города, лесистой местности и в плохих погодных условиях. Радиосигналы, передаваемые со спутника «зависают» в атмосфере, а возникающие на пути препятствия вызывают переотражения [29].
Предлагаемые сегодня различные подходы в решении задач планирования маршрута не учитывают ситуаций уточнения информации об окружающей среде в режиме реального времени [17]: дождь, сильный ветер, снег и непредвиденные препятствия могут вызывать отклонения от заданного маршрута.
Самостоятельная коррекция ЗЛА этих отклонений предполагает использование метрических датчиков смещений в показателях работы исполнительных механизмов (рис. 1, КУ, УПИ) с последующей передачей данных по каналу ОС в блок УПИ для коррекции отклонений в схеме автоматизации.
Выводы. В основе самоуправления автоматизированных устройств лежит информационно-аналитическое равновесие между различными по функционалу задаваемыми и исполнительными механизмами. Замкнутая обратная и прямая связь между механизмами представляет первичный элемент ИИ. Соподчиненные элементы системы управления и элементы объектов управления, объединенные во взаимозависимую функциональную систему коррекции, представляют вторичные элементы ИИ. Задаваемые и регистрируемые параметры и структуры траекторий движения представляют третичные элементы ИИ.
Программа самостоятельного плана полета ЗБЛА является расчетным состоянием равновесной активности всех исполнительных систем. В результате воздействия факторов внешней среды датчики контроля весовых отклонений включают системы переучета рулевых команд по устранению возникших потерь в расчетных показателях долевых тенденций задаваемого плана.
