Юстировочно-метрологический комплекс для регулировки положения и ориентации антенн при сборке космических аппаратов

Автор: Филина Марина Александровна, Костикова Надежда Юрьевна, Петров Владимир Викторович, Бузик Глеб Борисович, Зуев Юрий Викторович, Юсов Александр Викторович, Козлов Сергей Анатольевич, Устинова Екатерина Андреевна
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Наземные комплексы, стартовое оборудование, эксплуатация летательных аппаратов
Статья в выпуске: 3 (26), 2019 года.
Бесплатный доступ
Рассмотрены вопросы регулировки положения и ориентации рефлекторов антенных комплексов космического аппарата (КА) на этапе его сборки с применением созданного юстировочно-метрологического комплекса, состоящего из шестистепенного манипулятора и лазерной координатно-измерительной системы. Обеспечение заданного линейного и углового положений элементов антенных комплексов в базовой системе координат КА, сокращение трудозатрат и времени выполнения этой технологической операции - актуальная задача при создании КА. Для решения этой задачи была разработана и опробована на практике при сборке КА методика совместного использования шестистепенного манипулятора «Гексапод ПМ-мкм-П» и высокоточной лазерной координатно-измерительной системы Leica AT 403. Разработан алгоритм аппаратно-программного взаимодействия элементов юстировочно-метрологического комплекса, обеспечивающий итерационное позиционирование и ориентирование рефлекторов антенн в замкнутом цикле с обратной связью. В статье рассмотрены источники ошибок и пути минимизации их влияния на работу манипуляторов различных типов с применением постоянного контроля внешней измерительной системой. Созданный юстировочно-метрологический комплекс обеспечил высокоточное пространственное позиционирование элементов антенн в системе координат КА, что позволило исключить ошибки оператора-монтажника при выполнении юстировки и существенно сократить время выполнения указанной операции.
Космический аппарат, юстировка антенн, шестистепенной манипулятор с параллельной кинематической структурой, платформа гью-стьюарта, лазерная координатно-измерительная система
Короткий адрес: https://sciup.org/143172142
IDR: 143172142 | УДК: 621.396.67.084.42:629.78.022 | DOI: 10.33950/spacetech-2308-7625-2019-3-48-56
Alignment-and-metrological facility for fine adjustment of antenna linear and angular position during spacecraft assembly
The paper discusses issues involved in fine adjustment of the linear and angular position of antenna system reflectors on a spacecraft (SC) during its assembly using an alignment-and-metrology facility that has been developed, which consists of a 6-DOF pointing device and a laser coordinate measurement tracker. Achieving the specified linear and angular positions of antenna system elements in the SC datum reference frame, reducing human effort and time needed to perform this processing operation is an important task when building a spacecraft. To address this problem, a procedure was developed and tried out during an actual SC assembly consisting in the joint use of the 6-DOF pointing device Hexapod PM-mkm-P and the high-precision laser tracker Leica AT 403 for measuring the coordinates. An algorithm was developed for hardware/software interfacing between elements of the alignment-and-metrology facility, which provides iterative linear and angular positioning of the antenna reflectors in a closed loop with a feedback. The paper discusses sources of errors and the way to minimize their effect on the operation of various types of pointing using continuous monitoring by means of an external measuring system. The developed alignment-and-metrology facility provided high-precision spatial positioning of antenna elements in the SC coordinate system, which made it possible to rule out any errors by operator/installation worker during alignment and significantly reduce the time needed to perform the said operation.
Текст научной статьи Юстировочно-метрологический комплекс для регулировки положения и ориентации антенн при сборке космических аппаратов
При сборке космических аппаратов (КА) различного назначения одной из актуальных задач является высокоточная ориентация бортовых антенных радиокомплексов в базовой системе координат (СК) КА. Решение этой задачи позволяет обеспечивать взаимное положение диаграммы направленности антенн и СК бортовых приборов системы управления движением и навигации КА и вводить эти параметры в полетное задание КА.
До настоящего времени антенные комплексы, состоящие из связки «рефлектор–облучатель», устанавливались на КА (например, типа «Ямал») как единая сборка [1], в которой системы координат рефлектора и облучателя антенны были взаимно сориентированы при испытаниях антенн на антенном полигоне. Рефлектор и облучатель были смонтированы на общем основании, на котором устанавливался зеркальный куб. В системе координат этого зеркального куба была измерена и паспортизована фирмой-изготовителем антенн пространственная ориентация диаграммы направленности антенны. Такую конструкцию антенных комплексов реализовали фирмы Alenia Spazio (Италия), MDА (Канада) для КА РКК «Энергия» серий «Ямал-200» и «Ямал-300» [2].
Работы по измерению ориентации зеркальных кубов антенных комплексов в базовой СК КА в РКК «Энергия»
(например, КА серии «Ямал-200») проводились операторами-геодезистами с использованием автоколлимационных теодолитов (теодолиты 3Т2КА). С появлением высокоточных лазерных координатно-измерительных систем процесс прецизионных оптических измерений был автоматизирован. В настоящее время задача ориентации бортовых антенных комплексов при их установке на КА в РКК «Энергия» решается с высокой точностью в сжатые сроки с использованием лазерной координатно-измерительной системы Leica Absolute Tracker AT403 [3].
Крупногабаритные контурные антенны с диаметром рефлектора более 2 м могут быть собраны и отъюстированы непосредственно в процессе их сборки на КА. В РКК «Энергия» для установки таких антенн разработана и реализована следующая последовательность работ:
-
• установка на КА и юстировка в проектное положение в базовой СК КА облучающего устройства антенны;
-
• установка рефлектора антенны на специально разработанной жесткой оснастке до его монтажа на КА, юстировка положения рефлектора в базовой СК КА;
-
• раскрытие и обезвешивание смонтированного на КА механизма раскрытия антенны и установка его на фланец рефлектора антенны, закрепленного на жесткой оснастке;
-
• обезвешивание и демонтаж рефлектора антенны с жесткой оснастки.
Для решения задачи точного позиционирования (юстировки) крупногабаритных рефлекторов в базовой СК КА было предложено использовать робототехническую систему — высокоточный шестистепенной манипулятор отечественной разработки, обеспечивающую точное позиционирование рефлектора под контролем лазерной координатно-измерительной системы в рамках созданного единого аппаратно-программного юстировочно-метрологического комплекса.
робототехнические системы для прецизионного позиционирования, погрешности систем
Эффективным решением актуальной задачи позиционирования и ориентирования антенных комплексов является применение промышленных робототехнических систем — манипуляторов.
Повторяемость и разрешение (минимальный шаг перемещения) — основные характеристики, позволяющие оценить возможность применения промышленных роботов-манипуляторов в решении данной задачи.
Большинство современных роботизированных манипуляторов обладает высокой механической жесткостью конструкции, что обеспечивает повторяемость пространственного положения заданной рабочей точки объекта ( X , Y , Z ) на уровне 0,01…0,05 мм и менее [4, 5].
Стандарт ИСО 9283 в качестве основной характеристики выделяет абсолютную погрешность позиционирования рабочей точки объекта в выбранной СК [6]. На практике для роботов различных моделей абсолютная погрешность позиционирования составляет 0,5…6,0 мм [5]. Именно данный факт существенно ограничивает применимость роботизированных систем для прецизионного пространственного позиционирования элементов конструкции объектов (в частности, КА) без применения дополнительных вспомогательных систем определения ориентации и положения.
Абсолютная погрешность позиционирования объекта при помощи роботизированной системы позиционирования (РСП) складывается в т. ч. из описанных ниже составляющих.
Погрешность определения параметров кинематической модели робота-манипулятора. Основными кинематическими структурами, применяемыми в промышленной робототехнике, являются:
-
• последовательная кинематическая структура. Робот представляет собой набор соединенных между собой в последовательную цепь звеньев, работающих на изгиб и кручение. Пример — промышленные роботы-манипуляторы KUKA [4].
-
• параллельная кинематическая структура. Манипулятор типа «платформа Гью–Стьюарта» представляет собой пространственную трансформируемую гексагональную ферму, все элементы которой работают исключительно на растяжение и сжатие. При этом обеспечивается высокая жесткость конструкции при малой массе и достаточном для решения поставленной задачи диапазоне линейных и угловых перемещений. Пример — манипулятор шестистепенной «Гексапод ПМ-мкм-3» отечественной разработки ООО «Прикладная механика» (рис. 1) [7].
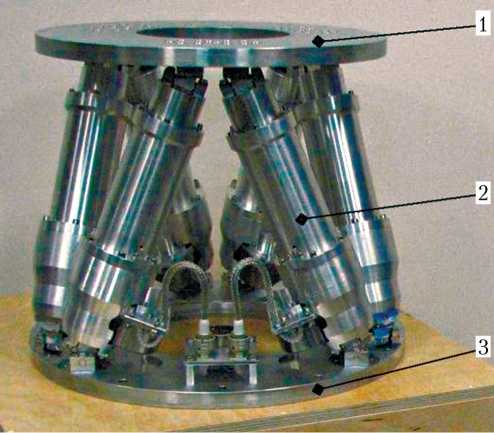
Рис. 1. Манипулятор шестистепенной «Гексапод ПМ-мкм-3»: 1 — верхняя подвижная платформа (эффектор); 2 — электромеханический привод (6 шт.); 3 — нижняя неподвижная платформа
Параметры кинематической модели (линейные и угловые параметры, описывающие положения СК звеньев (осей) робота-манипулятора друг относительно друга) являются ключевыми элементами в системах уравнений прямой и обратной кинематики, используемыми в виде коэффициентов [8–10].
При использовании роботов с последовательной кинематической структурой для высокоточного позиционирования объектов ошибки, накапливающиеся в узлах манипулятора, приводят к эффекту мультипликатора на выходном элементе. В этом случае суммарная ошибка системы будет суммой всех допущенных ошибок.
В роботах с параллельной структурой кинематических связей ошибка выходного элемента является среднеквадратичным значением от ошибок всех элементов.
Погрешность определения параметров объекта, установленного на концевом эффекторе робота-манипулятора. Любой объект, установленный на концевом эффекторе робота-манипулятора, в т. ч. позиционируемый в проектное положение рефлектор антенны, имеет свою собственную СК, началом которой является заданная рабочая точка объекта. Для позиционирования объекта необходимо знать, где именно относительно фланца робота-манипулятора расположена рабочая точка объекта, и как именно объект сориентирован, т. е. положение СК объекта относительно СК фланца робота-манипулятора должно быть известно с высокой точностью.
При решении прямой и обратной кине- матических задач вычисляются параметры трансформации (Торбоъбеоктт ) от базовой СК робота-манипулятора к СК объекта, опираясь на рассчитываемую трансформацию (Тфрлоабноетц) от базовой СК робота к СК фланца эффектора робота-манипулятора и на заданную трансформацию (Тофблъаенкетц) от СК фланца эффектора робота-манипулятора к СК объекта.
Ошибки в трансформации ( Т о ф б л ъ а е н к е т ц ) приводят к ошибкам в преобразовании от СК робота-манипулятора к СК объекта.
Погрешность определения положения РСП определяется погрешностью измерения фактического положения СК робота-манипулятора в выбранной СК. Для задачи позиционирования рефлектора антенны на КА — это погрешность определения параметров трансформации ( Т р К о А бот ) от базовой СК КА к СК робота-манипулятора.
Для выполнения прецизионного позиционирования рефлекторов антенн на КА с помощью роботизированного манипулятора необходимо исключить или минимизировать влияние указанных погрешностей.
В мировой практике промышленного производства для этого наиболее часто применяется технология калибровки робо- тизированного манипулятора, заключающаяся в выполнении цикла калибровочных измерений с помощью внешней измерительной системы и последующем расчете уточненных параметров кинематической модели, а также набора пара-
( Т фланец) ( Т робот )
объект , о б ъ е к т ,
метров трансформации
( Т р К о А бот ) [11, 12].
принцип работы юстировочно-метрологического комплекса при юстировке рефлекторов антенн на этапе сборки ка
РКК «Энергия» выполнила интеграцию системы позиционирования рефлекторов антенн с внешней измерительной системой, т. е. был образован единый юстировочно-метрологический комплекс, работающий в цикле с обратной связью для обмена данными. Прецизионное позиционирование рефлекторов антенн антенно-фидерных устройств бортового радиокомплекса КА в проектное положение с помощью роботизированного манипулятора осуществлялось под постоянным контролем прецизионной лазерной координатно-измерительной системы Leica Absolute Tracker AT403 .
Единый юстировочно-метрологический комплекс впервые реализован РКК «Энергия» при установке рефлекторов антенн С - и Ku- диапазонов на КА спутниковой связи (рис. 2).
Выбор роботизированного манипулятора для юстировки рефлекторов антенн С- и Ku- диапазонов проводился с учетом допусков на положение рефлекторов в СК КА, заданных в конструкторской документации. Рефлектор должен быть установлен на КА с допускаемым угловым отклонением не более ±0,007° вокруг осей СК КА и допускаемым линейным отклонением не более ±0,5 мм по всем трем осям.
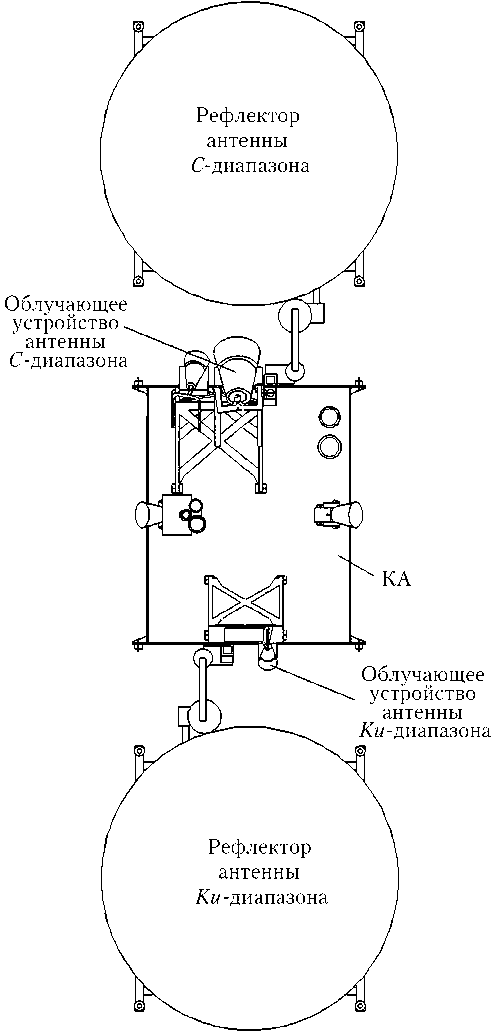
Рис. 2. Схема размещения антенн антенно-фидерных устройств бортового радиокомплекса на КА
Исходя из этих требований, для высокоточного позиционирования рефлекторов разработан высокоточный шестистепенной манипулятор «Гексапод ПМ-мкм-П» — специальная модификация манипуляторов серии «Гексапод ПМ-мкм-3» [7] с параллельной кинематической структурой, заключающаяся в доработке его эффектора для размещения и фиксации крупногабаритных рефлекторов антенн. Технические характеристики манипулятора представлены в таблице. Значение минимального шага линейного и углового перемещений данного манипулятора позволяет гарантированно обеспечить установку в проектное положение закрепленного на нем рефлектора.
технические характеристики манипулятора шестистепенного «гексапод пм-мкм-п»
|
Характеристика |
Ось |
Значение |
|
Диапазон линейных перемещений, мм |
Х |
±50 |
|
Y |
±50 |
|
|
Z |
±40 |
|
|
Диапазон угловых перемещений, ° |
X |
±15 |
|
Y |
±15 |
|
|
Z |
±20 |
|
|
Минимальный шаг линейного перемещения, мкм |
Х |
2 |
|
Y |
2 |
|
|
Z |
2 |
|
|
Минимальный шаг углового перемещения, ° |
X |
0,003 |
|
Y |
0,003 |
|
|
Z |
0,003 |
|
|
Линейная точность двунаправленного повторного позиционирования, мкм |
Х |
±3 |
|
Y |
±3 |
|
|
Z |
±3 |
|
|
Угловая точность двунаправленного повторного позиционирования, ° |
X |
±0,006 |
|
Y |
±0,006 |
|
|
Z |
±0,006 |
При измерении текущего фактического положения установленного на манипуляторе рефлектора антенны погрешность его положения будет определяться погрешностью измерений выбранного средства измерений — системы лазерной координатно-измерительной Leica Absolute Tracker AT403 , обеспечивающей требуемую точность измерений не хуже ±0,1 мм; ±0,003°.
На рис. 3 схематически показано размещение юстировочно-метрологического комплекса на рабочем месте оптических измерений и юстировки рефлекторов антенн С- и Ku- диапазонов на КА.
Рефлектор антенны через переходную раму закреплялся на манипуляторе «Гексапод ПМ-мкм-П», установленном на стойку посредством переходной фермы (рис. 3). Перемещения верхней подвижной площадки стойки обеспечивали первоначальную выставку рефлектора в положение, для которого диапазон подвижек манипулятора является достаточным для последующего получения требуемого отъюстированного положения рефлектора в базовой СК КА.
Перед началом юстировочных работ, в процессе разворачивания юстировочнометрологического комплекса и установки его компонентов в рабочее положение, выполнялся ряд калибровочных измерений с помощью лазерной координатноизмерительной системы Leica Absolute Tracker AT403 для определения набора параметров трансформаций (взаимного положения) следующих СК:
-
• измеренные параметры трансформации ( Т К тр А екер ) от СК лазерной координатно-измерительной системы (трекера) к базовой СК КА;
-
• измеренные параметры трансформации ( Т гексапод ) от СК манипулятора «Гек- рефлектор нач
сапод ПМ-мкм-П» к СК установленного на нем рефлектора в начальном положении;
-
• измеренные параметры трансформации ( Т трекер ) от СК лазерной коор- гексапод
динатно-измерительной системы к СК манипулятора «Гексапод ПМ-мкм-П».
При обмене пространственной информацией между компонентами комплекса в качестве основной рабочей СК принимается СК манипулятора «Гексапод ПМ-мкм-П».
Зная параметры трансформаций ( Т К тр А екер ) и ( Т г т е р к е с к а е п р од ), можно определить параметры трансформации ( Т гексапод ) и проектное положение рефлектора может быть представлено в СК манипулятора.
Процесс юстировки рефлекторов антенн проводится в следующей последовательности:
-
1. Измерительная система Leica Absolute Tracker AT403 , используя программное обеспечение (ПО) Spatial Analyzer Ultimate разработки фирмы New River Kinematics [13], определяет фактическое положение установленного на манипуляторе «Гексапод ПМ-мкм-П» рефлектора антенны в базовой СК КА — ( Т реф лектор ) ф акт -
-
2. Оператор манипулятора «Гексапод ПМ-мкм-П» передает в ПО Spatial Analyzer Ultimate из системы управления манипулятором информацию о текущем (фактическом) положении рефлектора в собственной СК манипулятора — ( Т гексапод ) .
-
3. Проводятся анализ и обработка измерительной информации, выполняется расчет параметров корректировки положения и ориентации — линейных и угловых отклонений текущего положения рефлектора от его номинального положения в СК манипулятора с помощью ПО S patial Analyzer Ultimate измерительной системы Leica Absolute Tracker AT403 и передается оператору манипулятора.
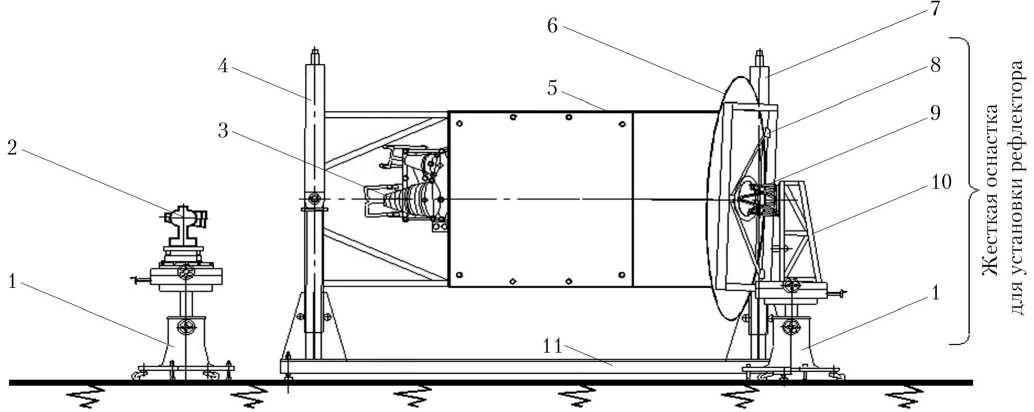
Рис. 3. Схематическое размещение юстировочно-метрологического комплекса на примере юстировки рефлектора антенны С-диапазона: 1 — стойка; 2 — лазерный трекер Leica Absolute Tracker AT403; 3 — облучающее устройство антенны С-диапазона; 4 — кольцо верхнее; 5 — космический аппарат; 6 — рефлектор антенны С-диапазона; 7 — кольцо нижнее; 8 — рама переходная; 9 — «Гексапод ПМ-мкм-П»; 10 — ферма для крепления гексапода; 11 — подставка-кантователь
-
4. Оператор манипулятора «Гексапод ПМ-мкм-П» вводит полученную информацию в систему управления манипулятора для перемещения рефлектора в заданное проектное положение. Манипулятор реализует требуемое перемещение.
рефлектор факт
Вышеобозначенные пункты 1–4 представляют собой одну итерацию цикла позиционирования с обратной связью.
Циклы повторяют до тех пор, пока отклонения от номинального пространственного положения рефлектора не войдут в установленный конструкторской документацией допуск.
Отработка взаимодействия лазерной координатно-измерительной системы Leica Absolute Tracker AT403 и системы позиционирования — манипулятора «Гексапод ПМ-мкм-П» в составе единого юстировочнометрологического комплекса РКК «Энергия» — была проведена вначале при юстировке рефлектора антенны С- диапазона на КА. Затем по отработанной методике был отъюстирован рефлектор антенны Ku- диапазона.
заключение
В РКК «Энергия» создан и успешно прошел испытания прецизионный юстировочно-метрологический комплекс, предназначенный для высокоточной ориентации крупногабаритных антенн антенно-фидерных устройств бортового радиокомплекса на этапе сборки КА. Комплекс обеспечил пространственное положение рефлекторов антенн С- и Ku- диапазонов в базовой СК КА с требуемой в конструкторской документации точностью.
Комплекс создан на базе двух систем: лазерной координатно-измерительной Leica Absolute Tracker AT403 и роботизированного высокоточного шестикоординатного манипулятора «Гексапод ПМ-мкм-П» отечественного производства.
Интеграция этих систем и разработанный алгоритм их взаимодействия позволили оперативно получать и использовать измерительную информацию о фактическом угловом и линейном положении рефлекторов антенн в базовой СК КА для автоматизированной корректировки и получения требуемых значений этих параметров.
Cозданный юстировочно-метрологический комплекс явился эффективной альтернативой ручной регулировке в трехмерной СК, позволил отказаться от изготовления дорогостоящей технологической оснастки и втрое сократить трудоемкость и временные затраты на установку антенн на КА.
Список литературы Юстировочно-метрологический комплекс для регулировки положения и ориентации антенн при сборке космических аппаратов
- Ракетно-космическая корпорация "Энергия" имени С.П. Королёва на рубеже двух веков. 1996-2001. М.: РКК "Энергия", 2001. 1326 с.
- Ракетно-космическая корпорация "Энергия" имени С.П. Королёва в первом десятилетии XXI века. 2001-2010. М.: РКК "Энергия", 2011. 832 с.
- Описание типа средств измерений. Системы лазерные координатно-измерительные Leica Absolute Tracker АТ403. Режим доступа: http://fgis.gost.ru/ fundmetrology.registry/4/items/491315 (дата обращения 20.03.2019 г.).
- Компания KUKA. Промышленная робототехника. Режим доступа: http://www. kuka.com/ru-ru/продукция-услуги/промыш-ленная-робототехника/ (дата обращения 20.03.2019 г.).
- Salmani M., Nubiola A., Bonev I.A. Assassement of the positioning performance of an Industrial Robot // Industrial Robot. 2012. V. 39. № 1. Р. 57-68.
- ГОСТ Р 60.3.3.12016/ИСО 9283: 1998. Роботы промышленные манипуляционные. Рабочие характеристики и соответствующие методы тестирования. М.: Стандартинформ, 2016. 53 с.
- ООО "Прикладная механика". Режим доступа: http://www.amech.ru/ (дата обращения 20.03.2019 г.).
- Мамаев Ю.А. Динамика движения робота-станка с параллельной кинематикой (гексапода) для окончательной обработки деталей сложной геометрии: Дис.. канд. тех. наук. Белгород: БГТУ им. В.Г. Шухова, 2014. 140 с.
- Крутиков С.Л. Идентификация параметров кинематических моделей манипуляционных роботов // Сб. трудов XII Всероссийского совещания по проблемам управления. М.: МГТУ им. Н.Э. Баумана, 2014. С. 3069-3078.
- Швандт А., Ющенко А.С. Исследование возможностей промышленного манипуляционного робота при выполнении сложных технологических операций // Робототехника и техническая кибернетика. 2013. № 1. С. 18-21.
- Воротников А.А., Подураев Ю.В., Ромаш Е.В. Оценка погрешности определения центров вращения звеньев кинематической цепи для методики калибровки промышленных роботов // Измерительная техника. 2015. № 8. С. 23-28.
- Бузик Г.Б. Геодезические методы калибровки и повышения абсолютной статической точности промышленных роботов-манипуляторов // Сб. трудов XII Всероссийской науч.-практ. конференции "Новые технологии при недропользовании", секция "Инновационные технологии в маркшейдерском деле, геодезии и кадастре". СПб.: РИЦ Санкт-Петербургского горного университета, 2016. C. 45-47.
- Компания New River Kinematics. Режим доступа: https://www.kinematics.com/ spatialanalyzer/packages.php#Ultimate/ (дата обращения 20.03.2019 г.).
