К анализу червячного зацепления в обобщающих координатах

Автор: Цуканов Олег Николаевич, Зизин Игорь Михайлович
Рубрика: Расчет и конструирование
Статья в выпуске: 12 (271), 2012 года.
Бесплатный доступ
Описаны задачи анализа червячного зацепления путем управления его обобщенной и локальной областями существования в обобщающих координатах. Представлены результаты анализа червячного зацепления самобло-кирующего дифференциала автомобиля «Урал», позволяющие определить рациональные параметры производящего реечного контура формообразующего инструмента.
Червячное зацепление, обобщающие координаты
Короткий адрес: https://sciup.org/147151539
IDR: 147151539 | УДК: 621.833
For analysis of worm gearing in generalizing coordinates
The problems of the analysis of the worm gearing by management of its generalised and local areas of existence in generalising coordinates are described. The results of the analysis of the worm gearing of the no-spin differential of the motor vehicle Ural are presented, which allow define rational parameters of forming rodsidebar of form-building instrumen
Текст научной статьи К анализу червячного зацепления в обобщающих координатах
Несмотря на широкое применение червячных передач, синтез и анализ червячных зацеплений до сих пор выполняется традиционным методом с привязкой к стандартному исходному контуру по схеме «от технологии изготовления - к параметрам зацепления и его качественным показателям». Это ограничивает диапазон выбора значений параметров зацепления и возможности управления комплексом его геометро-кинематических и нагрузочных показателей, что особенно важно для передач повышенного трения. В экстремальных условиях работы и при жестких требованиях к массогабаритным показателям спроектировать червячную передачу с наиболее благоприятным комплексом качественных показателей зацепления часто оказывается невозможным.
Проблема решается, если синтез и анализ зацепления выполнять в обобщающих координатах с использованием современных компьютерных технологий [1]. При этом сначала определяют профили зубцов (зубьев без переходных кривых), их параметры и свойства, качественные (геометро-кинематические и нагрузочные) показатели зацепления. Затем определяют параметры производящих контуров формообразующего инструмента, параметры переходной кривой зубьев, исполнительные размеры передачи. Иными словами, проектирование передачи выполняется по схеме «от зубчатого изделия - к технологии изготовления, от зубчатого колеса - к производящему контуру инструмента».
Анализ зацепления в обобщающих координатах выполняется путем управления обобщенной (предельной для заданной схемы передачи) и локальной (для определенного комплекса качественных показателей) областями его существования с их визуализацией на отдельной компьютерной панели с использованием следующих принципов [1]:
-
1) комплексом качественных показателей в обобщенной области существования зацепления (ООСЗ) можно управлять путем изменения значений обобщающих координат определяющей точки локальной области существования зацепления (ЛОСЗ);
-
2) комплексом качественных показателей зацепления в пределах ЛОСЗ можно управлять путем изменения формы ее граничной линии, соответствующей точкам поверхности вершин зубцов огибающего звена, и значений обобщающих координат ее крайних точек;
-
3) комплексом качественных показателей неэвольвентного зацепления в пределах ООСЗ и ЛОСЗ можно управлять путем изменения формы торцового профиля зубцов исходного звена.
Цуканов О.Н., Зизин И.М.
Для получения наиболее благоприятного комплекса геометро-кинематических и нагрузочных показателей зацепления для заданных условий работы передачи необходимо решить следующие задачи:
-
1) определить обобщенную область поиска этих показателей;
-
2) установить, как изменяются эти показатели при перемещении локальной области существования зацепления в пределах обобщенной области при изменении значений координат определяющей точки ЛОСЗ;
-
3) определить рациональную часть ООСЗ по комплексу показателей, из которой следует выбирать значения обобщающих координат определяющей точки ЛОСЗ в зависимости от критерия работоспособности передачи.
Поскольку почти все уравнения функций червячного зацепления являются трансцендентными [2], то их исследование выполняется численными методами с помощью специально разработанных программ.
Проиллюстрируем принципы анализа червячных зацеплений в обобщающих координатах на примере зацепления червячной передачи самоблокирующегося дифференциала заднего моста автомобиля «Урал» [2]. Передача образована на базе цилиндрического эвольвентного исходного колеса. Неэвольвентным звеном является червяк, который по форме заготовки также является цилиндрическим.
Основным требованием к зацеплению является минимизация контактных напряжений и максимального коэффициента скольжения зубцов.
Исходные параметры схемы передачи: угол скрещивания осей X = 90 ° , угол наклона зубьев колеса на начальном цилиндре в w 1 = 67 ° 43 ' 49 " соответственно угол подъема витков червяка X w 2 = 67 ° 43 ' 49 " число зубьев колеса z 1 = 21, число зубьев (витков) червяка z 2 = 4.
Для осуществления анализа червячного зацепления была разработана специальная программа на языке Visual Basic в программной среде Microsoft Visual Studio 2010.
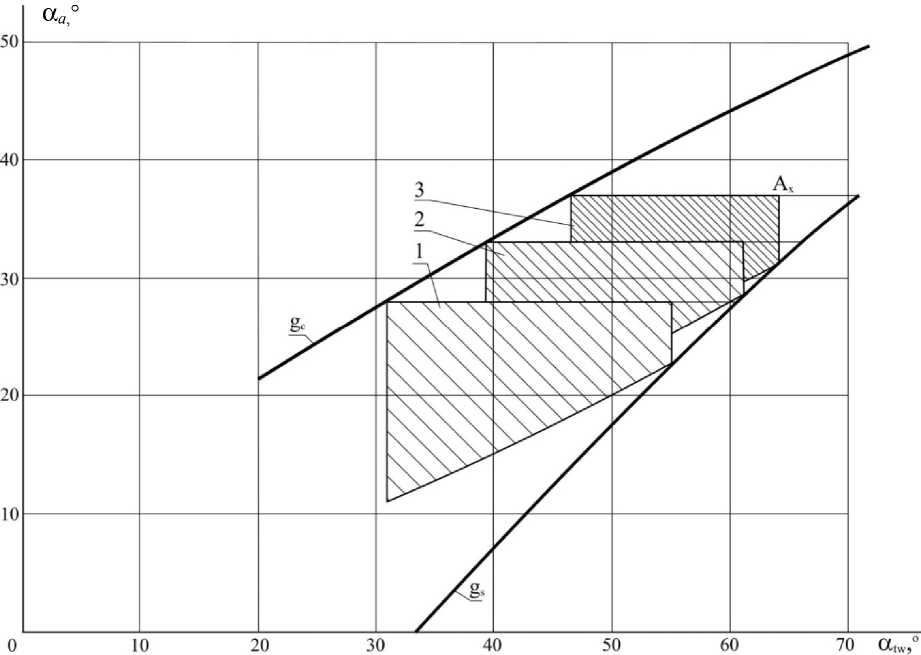
Локальные области существования червячного зацепления с X = 90 ° , в w 1 = 67 ° 43 ' 49 " Л w 2 = 67 ° 43 ' 49 " z 1 = 21, z 2 = 4 в зависимости от положения определяющей точки A x ( a a , а tw max ) в пределах обобщенной области существования: g c и g s - граничные кривые подрезания и заострения зубьев червяка; 1 - ЛОСЗ при a a = 28 ° , а tw max = 55 ° ; 2 - ЛОСЗ при а a = 33 ° , а tw m„ = 61 ° ; 3 - ЛОСЗ при а a = 37 ° , а tw m„ = 64 °
Расчет и конструирование
На рисунке показаны локальные области существования зацепления (для наглядности заштрихованы) в пределах его обобщенной области, соответствующей заданным параметрам схемы передачи, в зависимости от положения определяющей точки A x с обобщающими координатами a a (угол профиля эвольвентного зубца на окружности вершин) и a tw max (максимальный угол зацепления), выбираемыми при условии сохранения коэффициента перекрытия на одном и том же уровне (е 7 = 1,5).
Соответствующие варианты зацепления могут быть реализованы формообразующим инструментом, спроектированным на базе производящих реечных контуров (ПРК) с торцовыми углами профилей a t = 20 ° , 25 ° , 30 ° . Значения остальных параметров ПРК и соответствующих качественных показателей зацепления рассчитываются в зависимости от значений управляющих параметров ЛОСЗ с использованием формул, приведенных в [1].
Предварительные расчеты показывают, что при использовании ПРК с a t = 30 ° можно получить уменьшение контактных напряжений в зацеплении примерно на 15 %, а максимального коэффициента скольжения зубцов в 1,7 раза по сравнению с вариантом, полученным при использовании стандартного исходного контура с a t = 20 ° .
Список литературы К анализу червячного зацепления в обобщающих координатах
- Цуканов, О.Н. Основы синтеза неэвольвентных зубчатых зацеплений в обобщающих параметрах: моногр./О.Н. Цуканов. -Челябинск: Издат. центр ЮУрГУ, 2011. -140 с.
- Зизин, И.М. Синтез и анализ зацепления червячной передачи самоблокирующегося дифференциала в обобщающих параметрах/И.М. Зизин//Вестник ЮУрГУ. Серия «Машиностроение». -2009. -Вып. 14. -№ 33 (166). -С. 34-37.
