К фазовому анализу ходьбы и некоторых ритмических движений человека

Автор: Витензон А.С., Петрушанская К.А.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 1 (27) т.9, 2005 года.
Бесплатный доступ
В статье приведены материалы по исследованию ходьбы человека по горизонтальной поверхности и по лестнице вверх и вниз, а также при ритмических движениях на велоэргометре. Описана и проанализирована фазовая биомеханическая структура этих двигательных актов, установлена роль основных групп мышц разгибателей и сгибателей в осуществлении локомоторных и ритмических движений. Выявлены существенные различия в деятельности мышц- антагонистов при ходьбе (силовая функция мышц-разгибателей и корректирующая функция мышц-сгибателей).
Фазовая биомеханическая структура ходьбы, ритмические движения, мышцы-разгибатели и мышцы-сгибатели
Короткий адрес: https://sciup.org/146215818
IDR: 146215818 | УДК: 531/534:
Текст научной статьи К фазовому анализу ходьбы и некоторых ритмических движений человека
Несмотря на большое число исследований, посвящённых ходьбе и ритмическим движениям человека, эти акты недостаточно проанализированы с позиции их фазовой структуры и участия основных мышечных групп (разгибателей и сгибателей) в управлении двигательным процессом.
В настоящей работе сделана попытка рассмотреть основные фазы биомеханических событий, происходящих при разных видах ходьбы и велоэргометрии, найти объединяющие и различающиеся закономерности выполнения этих двигательных актов, выявить роль мышц–антагонистов в локомоторной синергии человека.
Материал и методы исследования
Исследования были проведены на группе здоровых испытуемых (10 человек) в возрасте от 20 до 40 лет. Рост испытуемых колебался от 172 до 190 см (в среднем 180 см), масса тела – от 64,3 до 103,6 кг (в среднем 84,2 кг).
Все испытуемые ходили по горизонтальной дорожке длиной 14 м, а затем по лестнице длиной 2,6 м. Лестница имела 7 ступенек высотой 15 см с металлической контактной поверхностью и площадкой наверху. В одну из ступенек была вмонтирована тензометрическая платформа для регистрации составляющих опорной
реакции. Сравнительные исследования ходьбы по горизонтальной поверхности и по лестнице производили у одних и тех же испытуемых в одном и том же опыте без перестановки датчиков межзвенных углов и без какого-либо изменения в калибровке регистрирующих приборов.
Биомеханические параметры записывали в 6 проходах по горизонтальной дорожке и в 8 проходах по лестнице вверх и вниз.
Регистрировали следующие биомеханические параметры: основные показатели ходьбы (темп, длину шага, среднюю скорость), временные характеристики, кинематические параметры (угловые перемещения и скорости в основных суставах нижних конечностей), динамические характеристики (вертикальную и продольную составляющие главного вектора опорной реакции).
Ранее были получены данные о движениях тазового и плечевого пояса верхних конечностей, перемещении общего центра масс и работе соответствующих мышц при ходьбе по горизонтальной поверхности.
Наряду с биомеханическими показателями ходьбы регистрировали электрическую активность мышц: передней большеберцовой, внутренней икроножной, четырёхглавой бедра, полусухожильной, большой ягодичной, подвздошно-поясничной. Электрическую активность мышц отводили поверхностными электродами, увеличивали усилителем биопотенциалов УБФ-4 и вводили в аналого-цифровой преобразователь в виде огибающей сигнала электромиографа при постоянной времени, равной 5 мс.
Все измеряемые параметры обрабатывали на ПЭВМ с частотой 200 Гц при помощи 12-разрядного аналого-цифрового преобразователя с погрешностью 2 разряда [1].
Биомеханические и электромиографические параметры при велоэргометрии исследовали у 9 здоровых испытуемых.
Регистрировали угловые перемещения в основных суставах нижних конечностей и электрическую активность следующих мышц: передней большеберцовой, камбаловидной, внутренней икроножной, наружной широкой, полусухожильной, двуглавой бедра, прямой бедра, напрягающей широкую фасцию бедра. Использовали произвольный темп ритмических движений (36 об/мин) при нагрузке 9,8 Н.
Результаты исследований и их обсуждение
Основные биомеханические фазы локомоторного цикла и работа мышц при ходьбе по горизонтальной поверхности в норме
Уже элементарный анализ показывает, что в течение локомоторного цикла происходит закономерная смена фаз с различной характеристикой биомеханических и электрофизиологических процессов. К настоящему времени существует несколько классификаций фаз шага.
Наиболее распространенная из них основана на использовании временных показателей цикла, регистрируемых с помощью двухконтактной электроподограммы. По этой классификации цикл состоит из двух основных фаз: опорной и переносной. В свою очередь, опорная фаза разделяется на три интервала: опора на пятку, на всю стопу и носок. Кроме того, различают двуопорную фазу.
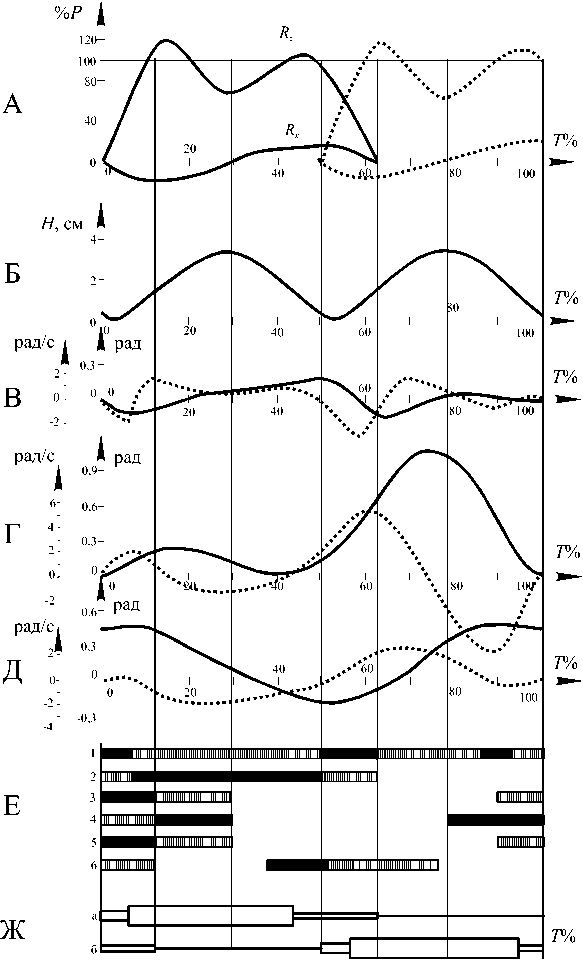
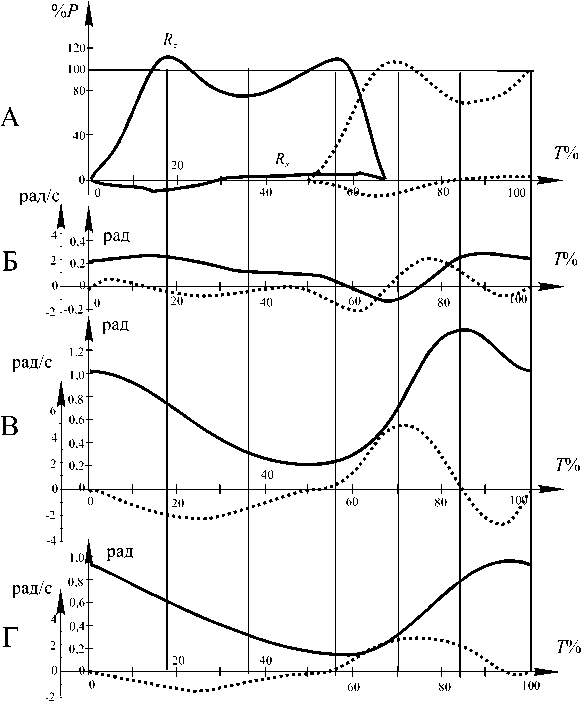
Рис. 1. Изменение динамических, кинематических и электрофизиологических параметров в течение цикла ходьбы: А – вертикальная ( Rz ) и продольная ( Rx ) составляющие опорной реакции, в % к массе тела; Б – вертикальные перемещения (Н) общего центра масс; В – голеностопный; Г – коленный; Д – тазобедренный углы правой ноги (град) и их первые производные (рад/с); Е – схема работы мышц правой ноги (1 – передняя большеберцовая, 2 – икроножная, 3 – четырёхглавая бедра, 4 – средняя ягодичная, 5 – большая ягодичная, 6 – подвздошно-поясничная); зачернённые участки – уступающая работа мышц, штриховка – преодолевающая работа мышц; Ж – подограммы (а – правой ноги, б – левой ноги)
Авторы, пользующиеся четырехконтактной электроподограммой, помимо двуопорной и переносной фаз, выделяют еще несколько интервалов, которые, по их мнению, отражают динамическую и статическую устойчивость при ходьбе [2, 3].
В основе ряда классификаций шага лежит изменение кинематических или динамических параметров ходьбы [4-9].
Многопараметрический анализ ходьбы позволяет разделить локомоторный цикл на шесть биомеханических фаз, разграниченных экстремальными значениями динамических параметров [10-13].
Отметим наиболее существенные черты каждой фазы локомоторного цикла (рис. 1).
Первая фаза (0 – 15% цикла)* соответствует фазе амортизации. В этой фазе происходит развитие переднего толчка, начинается подъем общего центра масс, возникают амортизационные движения в трех основных суставах нижней конечности (подошвенное, а затем тыльное сгибание в голеностопном суставе, сгибание в коленном и тазобедренном суставах), наблюдается уступающая работа большинства мышц опорной ноги (тыльные сгибатели стопы в первой половине этой фазы, разгибатели коленного сустава и тазобедренного сустава в течение всей фазы).
Во второй фазе – выпрямления ноги (16 – 30% цикла) – наступает спад опорной реакции (в конце фазы обозначается ее минимум), завершается подъем общего центра масс (достигается момент вертикали), происходит выпрямление конечности вследствие тыльного сгибания в голеностопном суставе и разгибания в проксимальных суставах, работа мышц приобретает преодолевающий характер (мышцы разгибатели коленного сустава и тазобедренного сустава).
В третьей фазе – наклона голени вперёд (31 – 50% цикла) – развивается задний толчок; общий центр масс начинает опускаться (достигается пик ускорения падения общего центра масс); в результате продолжающегося разгибания во всех суставах опорная конечность наклоняется вперёд (к концу этой фазы наблюдается максимальное тыльное сгибание в голеностопном суставе и максимальное разгибание в коленном и тазобедренном суставах); работа мышц осуществляется в уступающем режиме (сгибатели пальцев, трехглавая мышца голени, сгибатели бедра).
В четвертой фазе – отталкивания ноги от пола (51 – 65%) – вначале происходит разгибание в плюснефаланговом суставе, комбинирующееся с наклоном голени вперёд. Оба перемещения противоположно влияют на положение общего центра масс: первое способствует его повышению, второе – его понижению. В середине этой фазы возникает подошвенное сгибание в голеностопном суставе. Это движение приводит к повышению уровня общего центра масс, которое частично нейтрализуется продолжающимся разгибанием в плюснефаланговом суставе, сгибанием в коленном суставе, наклоном таза во фронтальной и его ротацией в горизонтальной плоскостях. Три последние фазы (вторая, третья, четвертая) составляют вместе фазу отталкивания ноги от опоры [7].
Пятая и шестая фаза относятся к переносной фазе ипсилатеральной конечности, но соответствуют второй и третьей фазам контралатеральной ноги.
В пятой фазе – сгибания ноги в крупных суставах (66 – 76% цикла) – происходит тыльное сгибание в голеностопном суставе, заканчивается сгибание в коленном суставе, в то время как сгибание в тазобедренном суставе все еще продолжается. В конце этой фазы конечность приобретает максимальную линейную и угловую скорость, опорная реакция другой ноги минимизируется, а общий центр масс вновь занимает высшее положение. Данная фаза объединяет фазы подъема и разгона [7] и соответствует фазе ускоренного движения ноги [6]. В этой фазе тыльные сгибатели стопы и сгибатели бедра работают в преодолевающем режиме, активность мышц разгибателей находится на низком уровне.
Шестая фаза – приземления ноги (77 – 100% цикла) – является завершением двойного шага. Ее следует разделить на две подфазы.
В первой из них (77 – 88% цикла) разгибание в коленном суставе комбинируется со сгибанием в тазобедренном суставе; к концу этой подфазы линейная и угловая скорость конечности становятся равными нулю, а центр масс ноги достигает
Подограмма правой ноги

ЭМГ, мкВ
Правая камбаловидная
мышца
мышца dl 1)млил111 ,
T %
4-----1-----к
100 120
----------11111--------------------H
0 20 40 60

Подограмма левой ноги
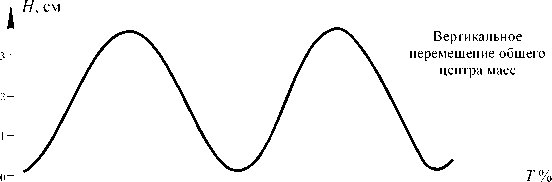
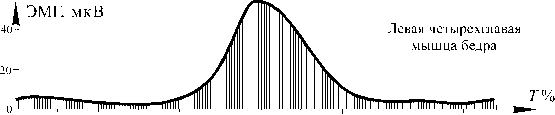
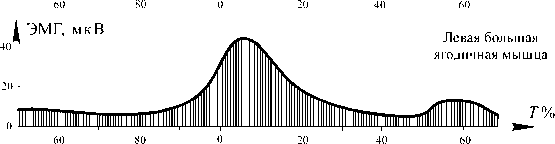
Рис. 2. Графики вертикальных перемещений общего центра масс тела человека (по М.И. Лапаеву, 1971) и изменения электрической активности мышц-разгибателей нижних конечностей в течение цикла ходьбы наивысшей точки. Во второй подфазе (89 – 100% цикла) заканчивается разгибание в коленном суставе и сгибание в тазобедренном суставе; в последнем затем наблюдается небольшое разгибание. Отмеченные подфазы соответствуют фазам торможения и опускания [7]. В течение шестой фазы мышцы в основном функционируют в уступающем режиме (сгибатели коленного сустава), но в самом конце фазы возможен и преодолевающий режим работы (тыльные сгибатели стопы, разгибатели коленного сустава).
Наиболее существенны для ходьбы первая и четвертая фаза, когда большинство параметров приобретает экстремальное значение.
Отмеченные фазы являются основными моментами взаимодействия нижних конечностей с опорной поверхностью, в результате которого происходит перемещение общего центра масс тела человека (рис. 2). Процесс протекает с различным участием двух основных мышечных групп ноги: разгибателей и сгибателей. Если работа мышц-разгибателей почти целиком направлена на перемещение общего центра масс и обеспечение устойчивости тела человека при ходьбе, то работа мышц-сгибателей имеет преимущественно коррекционный характер: она способствует уточнению положений и движений отдельных сегментов конечности.
Основной динамический эффект при ходьбе – подъем и продвижение вперед общего центра масс тела – создается благодаря суммированию силовых эффектов, производимых мышцами-разгибателями обеих ног: трехглавой мышцей голени одной конечности во время заднего толчка; четырехглавой мышцей бедра и большой ягодичной мышцей другой конечности во время переднего толчка. Опускание общего центра масс требует меньшего участия мышц, так как накопленная при его подъеме потенциальная энергия превращается в кинетическую. Тем не менее, и эта фаза контролируется деятельностью мышц-разгибателей (трехглавой мышцей голени), что обеспечивает плавность опускания общего центра масс.
Таким образом, мышцы-разгибатели образуют основную (силовую) часть локомоторной синергии. Строгая упорядоченность их работы в течение цикла определяет четкий колебательный характер перемещения общего центра масс.
Коррекционная функция мышц-сгибателей обусловливает их меньшую связь с определенными фазами шага.
Количественный анализ электрической активности мышц показывает, что более выгодный в энергетическом отношении уступающий режим доминирует в деятельности мышц-разгибателей при ходьбе, тогда как в работе мышц-сгибателей преодолевающий и уступающий режимы имеют примерно одинаковую длительность.
Хотя решающая роль при ходьбе принадлежит движениям и работе мышц ног, определенные задачи выполняют движения и мышцы вышележащих частей тела. Так, нижняя половина туловища при ходьбе совершает сложное движение, которое может быть спроецировано на три взаимно перпендикулярные плоскости. Цикл движения в каждой плоскости состоит из шести фаз, сопоставимых с ранее описанными биомеханическими фазами.
Колебания относительно фронтальной плоскости имеют период, равный длительности цикла; повороты таза в сторону неопорной конечности происходят лишь в двуопорные фазы (1 и 4 биомеханические фазы). Колебания относительно сагиттальной плоскости составляют половину цикла: в двуопорные фазы наблюдается наклон таза назад, в одноопорные фазы – наклоны таза вперед. Ротация таза относительно горизонтальной плоскости совершается с периодичностью цикла: при опоре на правую ногу таз вращается по часовой стрелке, а при опоре на левую ногу – против часовой стрелки [14].
Сопоставление кривых, описывающих движения таза, с графиками составляющих опорной реакции дают основание считать, что наклоны и ротация нижней половины туловища при ходьбе являются результатом силового взаимодействия ног с опорной поверхностью. Об этом же свидетельствуют ЭМГ-исследования: электрическая активность возникает обычно в тех группах мышц, которые противодействуют движениям таза и позвоночника; максимальное значение активности приходится на те фазы шага, при которых эти движения приобретают наибольшую амплитуду и скорость. Следовательно, мышцы таза, спины и живота не создают движения этих звеньев тела при ходьбе, но, работая преимущественно в уступающем режиме, регулируют их параметры.
Многосторонняя функция движений таза и позвоночника при ходьбе может быть сведена к трем основным элементам: участию в механизме перемещения тела над опорной поверхностью, стабилизации его вертикальной позы и минимизации энерготрат посредством уменьшения амплитуды колебаний общего центра масс [15-17].
Вращательные движения верхнегрудного отдела позвоночника и плечевого пояса относительно всех плоскостей совершаются в противофазе к движениям нижнегрудного отдела позвоночника и таза. Кинематические кривые, описывающие движения рук, имеют форму, близкую к синусоидальной, и период, равный циклу ходьбы. Отрицательный экстремум этих кривых соответствует моменту, когда нога ставится на пятку, а верхняя конечность той же стороны находится в крайнем заднем положении. Положительный экстремум кривых достигается при 50% цикла, когда рука занимает крайнее переднее положение [18, 19].
Сопоставление кривых угловых перемещений в проксимальных суставах руки с кривой ротации верхнегрудного отдела позвоночника обнаруживает значительное сходство: экстремальные точки обеих кривых почти полностью совмещаются по оси времени. Сгибание правой руки в плечевом и локтевом суставах в первую половину цикла соответствует ротации верхнегрудного отдела позвоночника против часовой стрелки; разгибание в суставах руки во второй половине цикла по времени совпадает с ротацией этого же отдела позвоночника по часовой стрелке. В то же время, кривая ротации верхнегрудного и нижнегрудного отделов позвоночника различны по форме, величине и противоположны по направлению.
К динамическим факторам, вызывающим движения плечевого пояса и верхних конечностей, следует, прежде всего, отнести мышечные силы.
Согласно ЭМГ при ходьбе активируется лишь часть мышц плечевого пояса и рук, преимущественно мышцы-разгибатели и ротаторы: активация мышц-сгибателей мала и нерегулярна. Наиболее высокая волна возбуждения отмечается в середине цикла ходьбы. Все активируемые мышцы сначала работают в уступающем, а затем в преодолевающем режиме [18, 20]. Средняя электрическая активность мышц плечевого пояса и рук примерно в 2 – 3 раза меньше активности мышц нижних конечностей.
Таким образом, вращательные движения плечевого пояса и рук имеют активный характер, хотя в их построении также участвуют силы инерции и силы тяжести. Основное назначение этих движений – оптимизация ротационных движений таза с целью предотвращения чрезмерного осевого поворота тела при ходьбе.
В заключение отметим наиболее существенные биомеханические и физиологические закономерности ходьбы человека:
-
• ходьба относится к числу баллистических движений, в которых минимизация действия мышечных сил достигается путем всемерного использования сил инерции и реактивных сил [21];
-
• основную двигательную функцию при ходьбе выполняет группа мышц-разгибателей, которая обусловливает подъем и продвижение вперед общего центра масс и далее контролирует его опускание;
-
• мышцы-сгибатели имеют в основном коррекционную функцию, регулируя
движения отдельных сегментов тела по амплитудно-скоростным параметрам, особенно в переносную фазу шага.
-
• тогда как движения нижних и верхних конечностей являются результатом деятельности их собственных мышц, движения нижней половины туловища при ходьбе отражают силовое взаимодействие ног с поверхностью опоры; мышцы таза, спины, живота не создают эти движения, но, работая главным образом в уступающем режиме, определяют их амплитуду и скорость; основная задача этих мышц – стабилизация вертикальной позы и уменьшение колебаний общего центра масс.
Д

Рис. 3. Изменение динамических, кинематических и электрофизиологических параметров в течение цикла при ходьбе по лестнице вверх: А – вертикальная ( Rz ) и продольная ( Rx )
Е
б

T %
составляющие опорной реакции, в % к массе тела; Б – голеностопный; В – коленный; Г – тазобедренный углы правой ноги (град) – сплошная линия и их первые производные (рад/с) – пунктирная линия; Д – схема работы мышц правой ноги (1 – передняя большеберцовая, 2 – икроножная, 3 – четырёхглавая бедра, 4 – средняя ягодичная, 5 – большая ягодичная, 6 – подвздошно-поясничная); зачернённые участки – уступающая работа мышц, штриховка – преодолевающая работа мышц; Е – подограмма (а – правой ноги, б – левой ноги)
Следовательно, наблюдается строгая специфичность биомеханической функции каждой части тела при ходьбе: опорная и толчковая функция ног, стабилизирующая функция туловища и балансировочная функция рук.
Основные биомеханические фазы локомоторного цикла и работа мышц при ходьбе по лестнице в норме
Тот же принцип разделения локомоторного цикла, использованный при рассмотрении ходьбы по горизонтальной поверхности, по-видимому, применим и для
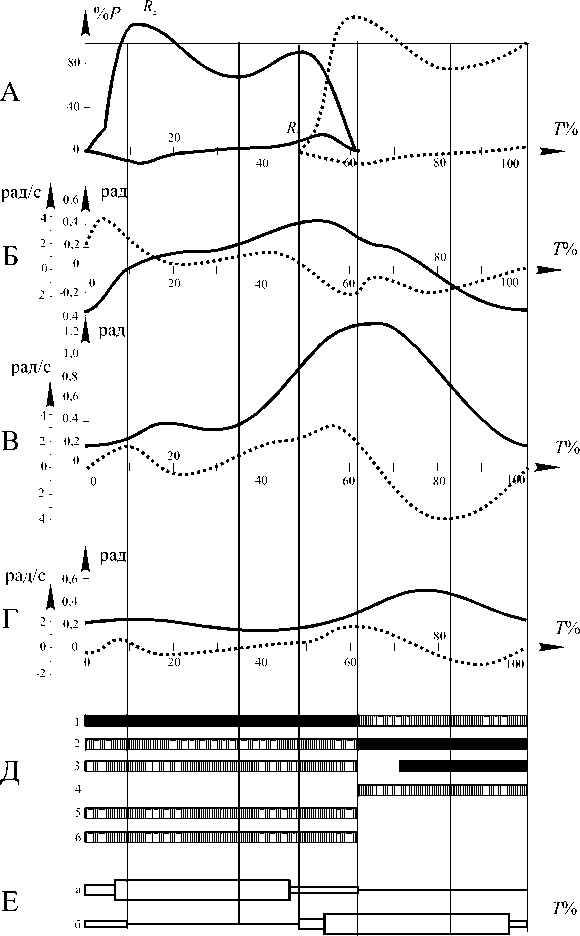
Рис. 4. Изменение динамических, кинематических и электрофизиологических параметров в течение цикла при ходьбе по лестнице вниз. Остальные обозначения те же, что на рис. 3
анализа биомеханической структуры ходьбы по лестнице. Основными критериями для фазировки цикла являются экстремальные значения опорных реакций, прежде всего R z составляющей. При этом также учитываются основные режимы работы мышц: преодолевающий и уступающий. В соответствии с такими принципами фазировки биомеханических событий удаётся выявить в цикле ходьбы по лестнице вверх и вниз шесть основных фаз [22-25].
Ходьба по лестнице вверх (рис. 3)
Первая фаза (0-19% цикла) характеризуется следующими изменениями биомеханических параметров: вертикальная R z и продольная R x составляющие опорной реакции достигают максимальной величины в области переднего толчка. Одновременно наблюдается небольшое тыльное сгибание в голеностопном суставе и незначительное разгибание в коленном суставе и тазобедренном суставе.
Для второй фазы (19-36% цикла) типичными являются спад значений R z и R x составляющих до минимума, слабое подошвенное сгибание в голеностопном суставе и резкое разгибание в коленном суставе и тазобедренном суставе с минимальной скоростью для опорной фазы. В результате нога, наступившая на вышестоящую ступеньку лестницы, почти полностью выпрямляется (до угла 13? в коленном и тазобедренном суставах).
Третья фаза (36-56% цикла), по существу, является подготовительной. R z составляющая достигает максимального значения в области заднего толчка, движения в голеностопном, коленном и тазобедренном суставах замедляются, наступает опора на передний отдел стопы.
В четвёртой фазе (56-70% цикла) события развиваются более стремительно, в конце фазы R z и R x составляющие приобретают максимальное значение в области переднего толчка контралатеральной ноги, происходит подошвенное сгибание в голеностопном суставе и резкое сгибание в коленном и тазобедренном суставах ипсилатеральной ноги, всё ещё находящейся на опоре: при этом наблюдается наибольшая угловая скорость движения в проксимальных суставах перемещающейся конечности; в конце этой фазы возникает отрыв стопы от опорной поверхности.
В пятой фазе (70-85% цикла) стопа наступает на следующую ступеньку благодаря энергичному тыльному сгибанию в голеностопном суставе, чрезмерному сгибанию в коленном суставе и умеренному сгибанию в тазобедренном суставе. На контралатеральной ноге обозначается минимальное значение R z и R x составляющих.
В шестой фазе (85-100% цикла) ∗ завершается локомоторный цикл, стабилизируются движения в голеностопном и тазобедренном суставах, происходит корректирующее сгибательное движение в коленном суставе вследствие раннего превышения амплитуды разгибания. Стопа устанавливается на вышестоящую ступеньку при полусогнутом положении ноги. На контралатеральной конечности фиксируются максимальные значения R z и R x составляющих.
Таким образом, судя по величине и скорости движений, наибольшую роль при передвижении вверх по лестнице играют угловые перемещения в коленном суставе и отчасти в тазобедренном суставе. В первом из них в фазах опоры и переноса возникают наибольшие угловые скорости.
Уже на этом основании можно предположить, что наибольшее участие при ходьбе по лестнице в опорную фазу шага приобретает деятельность мышц-разгибателей коленного и тазобедренного суставов (четырёхглавой мышцы бедра, большой и средней ягодичных мышц и некоторых других экстензоров бедра). Менее ясна роль мышц голени. Во время опорной фазы на долю передней большеберцовой мышцы и отчасти икроножной мышцы падает роль стабилизатора голеностопного сустава.
Позднее икроножная мышца может принимать некоторое участие в подошвенном сгибании стопы и создавать толчок ноги вверх, а передняя большеберцовая мышца благодаря мощному сокращению в преодолевающем режиме вызвать подъём стопы.
Стремительное сгибание в коленном суставе осуществляется благодаря сокращению сгибателей голени (полусухожильной, двуглавой бедра и др.). В начале этого движения несомненное участие принимает и икроножная мышца. В шестой фазе уменьшение сгибания в коленном суставе может корректироваться разгибателями в
∗ Проценты фаз шага даны приблизительно, поскольку они в значительной мере зависят от скорости передвижения по лестнице.
тазобедренном суставе, т.е. теми же мышцами, но с переключением режима их работы на другой сустав.
Таким образом, в отличие от ходьбы по горизонтальной поверхности, преодолевающий режим в работе мышц нижних конечностей становится доминирующим при ходьбе по лестнице вверх. Последнее, вероятно, связано с необходимостью постоянного преодоления веса тела. В то же время, уступающий режим работы мышц имеет, скорее всего, корректирующее значение.
Ходьба по лестнице вниз (рис. 4)
Первая фаза (0-15% цикла) характеризуется изменением амплитуды R z и R x составляющих опорной реакции от нуля до максимальных значений в области переднего толчка. При этом в голеностопном суставе отмечается резкое тыльное сгибание стопы, ранее поставленной на передний отдел, небольшое сгибание в коленном суставе до угла 20? и практическое отсутствие угловых перемещений в тазобедренном суставе.
Во второй фазе (15-35% цикла) происходит спад амплитуд обеих составляющих опорной реакции до минимума; продолжается, но более плавное тыльное сгибание в голеностопном суставе, замедляются движения в коленном и тазобедренном суставах.
В третьей фазе (35-54% цикла) значение R z составляющей опорной ноги становится максимальным, увеличивается наклон голени вперёд (тыльное сгибание в голеностопном суставе), резко возрастает амплитуда и угловая скорость сгибания в коленном суставе ноги, всё ещё находящейся на опоре, практически отсутствует движение в тазобедренном суставе.
В четвёртой фазе (54-65% цикла) формируется максимум R x составляющей опорной ноги, а в конце этой фазы уже во время переноса возникают максимумы R z и R x составляющей контралатеральной конечности. Происходит перегиб кривой голеностопного сустава: тыльное сгибание сменяется подошвенным, завершается сгибание в коленном суставе и наблюдается небольшое сгибание в тазобедренном суставе.
В пятой фазе (66-81% цикла) опорные реакции контралатеральной конечности минимизируются. Продолжается подошвенное сгибание в голеностопном суставе, развивается быстрое сгибание в коленном суставе и небольшое сгибание в тазобедренном суставе.
В шестой фазе (81-100% цикла) завершается цикл ходьбы: стопа в положении резкого подошвенного сгибания (до 20?) устанавливается на нижестоящей ступеньке, происходит разгибание в коленном и тазобедренном суставах до угла 15?.
Во всех фазах участвуют мышцы нижней конечности, функционирующие в режимах уступающей или преодолевающей работы.
Для первых трёх фаз характерен преодолевающий режим передней большеберцовой мышцы, затем возникает постепенно нарастающий преодолевающий режим работы икроножной мышцы. Большинство мышц-разгибателей коленного и тазобедренного суставов в опорную фазу функционируют в режиме уступающей работы, наоборот, режим уступающей работы в течение переносной фазы заметен лишь у полусухожильной и двуглавой мышц бедра.
Сравнение ходьбы по лестнице вверх и вниз выявляет ряд общих и различных черт.
К первым относится относительно более медленный характер движений в фазе опоры и более быстрый в фазе переноса, наибольшая амплитуда угловых перемещений в коленном суставе.
2 ■ lll l l l lllllll l lllllll l
3 lllllllllllllllllllllllllllllllllllllll ■■■■■и
М
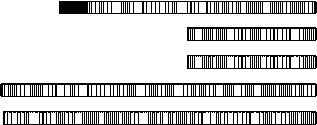
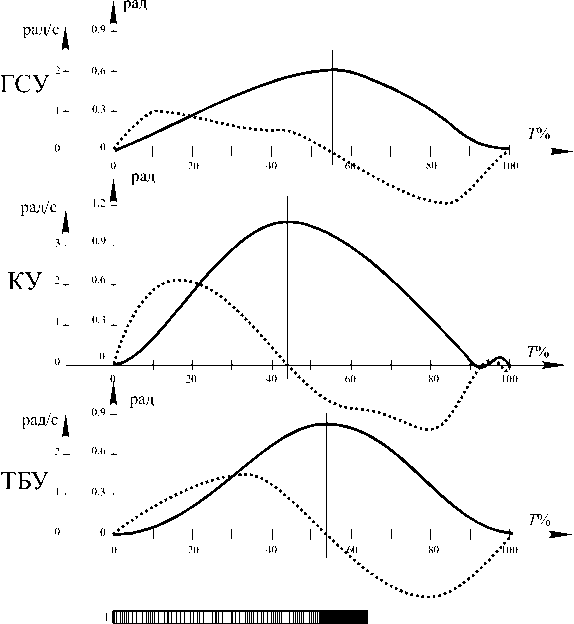
Рис. 5. Кинематические и электрофизиологические параметры движений при проведении велоэргометрии: ГСУ – голеностопный угол, КУ – коленный угол, ТБУ – тазобедренный угол (рад) и их первые производные (рад/с) правой ноги; М – схема работы мышц нижних конечностей (1 – передняя большеберцовая, 2 – камбаловидная, 3 – икроножная, 4 – наружная широкая, 5 – полусухожильная, 6 – двуглавая бедра, 7 – прямая бедра, 8 – напрягающая широкую фасцию бедра); зачернённые участки – уступающая работа мышц, штриховка – преодолевающая работа мышц
Вместе с тем, для ходьбы по лестнице вверх большое значение приобретают движения в тазобедренном суставе, для ходьбы по лестнице вниз - движения в голеностопном суставе.
Обращает на себя внимание также доминирующий силовой преодолевающий тип работы при ходьбе по лестнице вверх и, в основном, корректирующий и уступающий режим деятельности мышц при ходьбе по лестнице вниз.
Биомеханические фазы ритмических движений при проведении велоэргометрии (рис. 5)
В отличие от ходьбы при ритмических велоэргометрических движениях можно выделить две основные фазы: разгибательную и сгибательную. Первая из них является основной, поскольку запускает движения и определяет их скорость. Поэтому она характеризуется значительной синхронностью развития экстремальных значений угловых скоростей и ускорений и подключением большого числа мышц нижних конечностей. В этой фазе участвует четырёхглавая мышца бедра (наружная широкая и прямая), напрягающая широкую фасцию бедра, несколько позднее полусухожильная и двуглавая мышцы бедра как разгибатели тазобедренного сустава и, наконец, разгибатели голеностопного сустава: камбаловидная и икроножная.
Разгибательная фаза начинается с работы двусуставных мышц, которые ранее функционируют как сгибатели тазобедренного сустава, а затем переключаются на роль разгибателей коленного сустава. К ним примыкают короткие головки четырёхглавой мышцы бедра, а завершают эту силовую композицию мышцы-разгибатели тазобедренного сустава (полусухожильная и двуглавая бедра) и мышцы-разгибатели голеностопного сустава (икроножная и камбаловидная).
Сгибательная фаза возникает по инерции вследствие продолжающегося кругового движения велосипедного колеса, запущенного другой нижней конечностью. Когда скорость этого движения начинает уменьшаться, подключаются мышцы-сгибатели голеностопного сустава (передняя большеберцовая) и мышцы-сгибатели тазобедренного сустава (прямая бедра и напрягающая широкую фасцию). В дальнейшем цикл переходит в разгибательную фазу [26].
Общее представление об основных компонентах локомоторных синергий
Ещё в 1974 г. авторами было высказано предположение, что локомоторная синергия состоит из двух частей: разгибательной и сгибательной. Это представление нельзя считать полностью оригинальным, так как и ранее отдельные авторы высказывали мнение о разной роли этих мышц в акте ходьбы животных и человека [27-30]. Более того, были установлены фундаментальные факты об асимметричном действии различных мышечных рецепторов (афферентов Ia, 1б, II) на альфа-мотонейроны мышц-антагонистов, были выявлены неоднозначные влияния центральных и афферентных факторов при управляемой локомоции [31, 32].
Тем не менее, все эти представления носили бόльшей частью аналитический, а иногда фрагментарный характер и не касались существенных различий мышц-антагонистов в связи с выполняемыми ими локомоторными функциями.
Авторами было отчётливо показано, что мышцы-разгибатели и сгибатели отличаются по ряду важнейших особенностей.
-
1. Прежде всего, по анатомическому строению. Мышцы-разгибатели, особенно односуставные, представляют собой мышцы с большим поперечником и, следовательно, способны развивать большую силу, которая прогрессирует в возрастном аспекте. Наоборот, мышцы-сгибатели нижних конечностей, как правило, длинные тонкие мышцы, нередко филогенетически образованные из односуставных мышц, имеющих собственное кровообращение и иннервацию.
-
2. Мышцы-разгибатели как у животных, так и у человека, функционируют строго в опорную фазу (исключение составляют лишь отдельные двусуставные мышцы). Работа этих мышц в фазу опоры осуществляет силовое обеспечение локомоции в течение всего цикла. Активность мышц-сгибателей менее сконцентрирована в определённые фазы шага, хотя при хорошо отработанном навыке встречается в конце опорной и переносной фаз шага.
-
3. Мышцы-разгибатели создают перемещение общего центра масс, двигая тело как перевёрнутый маятник с точкой опоры в области голеностопного сустава. Мышцы-сгибатели, преимущественно, корректируют движения в переносную фазу шага. Причём эти движения, в основном, подготовлены предшествующей работой мышц-разгибателей в фазе опоры.
Таким образом, мышцы-разгибатели составляют силовую, а мышцы-сгибатели коррекционную части локомоторной синергии.
Вся многолетняя ортопедо-неврологическая практика показывает, что утрата основных мышц-разгибателей нижних конечностей создаёт неимоверные трудности для реабилитационного процесса: больных приходится заковывать в замковые аппараты и ходьба становится трудно достижимой. В то же время отсутствие многих мышц-сгибателей в меньшей мере влияет на возможности восстановления локомоции: функция этих мышц может быть в значительной степени восполнена с помощью буферно-приводных устройств.
При искусственной коррекции движений посредством электростимуляции мышц даже у чрезвычайно тяжёлых больных наибольший эффект достигается при электрическом воздействии на разгибатели тазобедренного сустава и коленного сустава.
Рассмотренные нами различные виды локомоций полностью подтверждают указанную точку зрения на функции мышц-антагонистов.
Не только при хорошо изученной ходьбе по горизонтальной поверхности, но и при ходьбе по лестнице вверх и вниз проявляется неоднозначная функция мышц-антагонистов. При ходьбе по лестнице вверх это особенно бросается в глаза, так как подъём массы тела вверх требует мощных усилий со стороны мышц-разгибателей. И, действительно, в ЭМГ-профиле этих мышц появляются крупные резкопролонгированные волны активности мышц, захватывающие большую часть опорной фазы.
Но и при ходьбе по лестнице вниз, где само перемещение массы тела вниз требует значительно меньших усилий, мышцы-разгибатели продолжают мощно работать, чтобы обеспечить нужную устойчивость тела и минимизировать риск падения.
Все приведённые данные о функциональном различии мышц-антагонистов при выполнении локомоторных и других движений имеют отнюдь не только теоретическое значение. Они должны стать основополагающими моментами в разработке различных восстановительных мероприятий при нарушениях и повреждениях опорнодвигательного аппарата, учитываться при всех видах реабилитационной тренировки мышечной функции.
Выводы
-
1. Многокритериальный анализ структуры ходьбы человека позволяет выявить в локомоторном цикле шесть устойчивых биомеханических фаз, разграниченных экстремальными значениями динамических параметров и представляющих собой совокупность изменений опорных реакций, перемещений общего центра масс, движений в различных суставах и режимов работы мышц. При ходьбе по горизонтальной поверхности и по лестнице вверх наиболее существенными являются фазы, отражающие подъём и перемещение вперёд общего центра масс тела человека.
-
2. Процесс перемещения общего центра масс при ходьбе происходит с различным участием основных мышечных групп ноги. Работа мышц-разгибателей, направленная на перемещение общего центра масс и создание устойчивости при ходьбе, составляет наиболее важный силовой компонент локомоции, тогда как работа мышц-сгибателей преимущественно состоит в коррекции положений и движений отдельных сегментов конечности, особенно в переносную фазу шага.
-
3. Наклоны и ротация нижней половины туловища при ходьбе являются результатом силового взаимодействия ног с поверхностью опоры. Мышцы таза, спины, живота не создают эти движения, но, работая, главным образом, в уступающем режиме, регулируют их параметры. В то же время, противофазная ротация плечевого пояса и рук возникает вследствие деятельности собственных мышц и содействует оптимизации ротационных движений таза. Принцип разделения мышц при ходьбе на силовые (разгибатели) и коррекционные (сгибатели) сохраняет своё значение для мышц туловища и верхних конечностей.
-
4. При ходьбе по лестнице характер движений и работы мышц приближается к локомоции по горизонтальной поверхности. Остаётся и основополагающий принцип рационального функционирования мышц-антагонистов. При подъёме по лестнице доминирует силовой преодолевающий тип работы мышц, а при спуске с лестницы - корректирующий и уступающий режим мышечной деятельности.
-
5. При ритмических велоэргометрических движениях наблюдаются две основные фазы: разгибательная и сгибательная. Первая из них является основной, так как запускает движения и определяет их скорость. Следовательно, и в этом случае преобладающей является функция мышц-разгибателей. Однако, при ритмических круговых движениях отчётливо выступает также роль двусуставных мышц как переключателей двигательного процесса с одного сустава нижней конечности на другой.
