К методике определения сопротивления материалов импульсному нагружению

Автор: Купершляк-Юзефович Георгий Марианович, Шкербин Юрий Владимирович, Исаева Наталия Юрьевна
Рубрика: Контроль и испытания
Статья в выпуске: 33 (166), 2009 года.
Бесплатный доступ
Приведена оригинальная методика синхронного измерения продольной силы и деформации в контрольном сечении стержня-образца при распространении упругопластической волны. По экспериментальным зависимостям напряжение-деформация-время алюминиевых сплавов и аустенитной стали выявлены два последовательных вида деформирования: упругопластическое при постоянной скорости нагружения и динамическая ползучесть при уменьшении скорости нагружения и разгрузке.
Напряжение, деформация, скорость, импульсное нагружение
Короткий адрес: https://sciup.org/147151478
IDR: 147151478 | УДК: 531.78.2
То the method to define the impulse load strength of materials
An original technique of synchronous measurement of longitudinal force and deformation in the check section of model rod at elastoplastic wave transmission is presented. By experimental dependences tension-deformation-time of aluminum alloys and austenitic steel two consecutive types of deformation are defined: elastoplastic at constant speed of load and dynamic creep at loss of speed of load and unload.
Текст научной статьи К методике определения сопротивления материалов импульсному нагружению
Технологии изготовления деталей машиностроительных конструкций в основном основаны на пластическом деформировании материалов. Анализ условий работы материалов в конструкциях и при изготовлении деталей показывает на необходимость учета реономных (зависящих от времени) свойств материалов. Особенно это нужно учитывать при высокоскоростных нагружениях конструкций и технологиях штамповки и сварки взрывом, ковки и штамповки на автоматах.
Одной из основных задач экспериментальной механики деформируемого твердого тела является разработка методик для определения параметров, характеризующих пластическое деформирование материала. Обычно эти параметры определяют по экспериментальной зависимости напряжение-продольная деформация при испытаниях образцов в виде цилиндрических стержней при линейном напряженном состоянии растяжения или сжатия.
При импульсном нагружении (удар, взрыв), длительность фронта которого характеризуется микросекундами, необходимо учитывать, что напряженно-деформированное состояние стержня-образца создается упругопластическими волнами. В этом случае нужно определить зоны образца, где создается линейное напряженное состояние с равномерным распределением напряжений по поперечному сечению. На фронте волны практически невозможно создать однородное состояние по продольной координате и возникает задача синхронного определения напряжения и деформации в контрольном сечении образца.
Для определения зависимости напряжение-время, синхронной с деформацией, в ЮжноУральском государственном университете разработана оригинальная методика [1].
В отличие от принятых в мировой практике методик, рассмотренных в обзорных работах [2, 3] и известных нам по публикациям в периодической печати, по этой методике впервые удалось определить напряжения в контрольном сечении образца без предположений о виде уравнения состояния исследуемого материала и условий распространения волн в системе нагружения образца.
На схеме нагружения образца и установки датчиков (рис. 1) передающий стержень Т установлен на центрирующих резиновых втулках в стволе вертикальной пневмоустановки. Упругий прижим, не влияющий на распространение волны, обеспечивает контакт образца М со стержнем Т.
Импульс силы F(t). нагружающий систему, создастся ударом бойка, скорость которого обеспечивает упругое соударение. На расстоянии от точки удара более двух диаметров в стержне распространяется волна линейного напряженного состояния [4]. В работе [5] показано, что при этом напряжения равномерно распределены по поперечному сечению стержня. Упругая волна, распространяющаяся в стержне Т, при переходе границы Т-М создает в образце М упругопластическую волну. В работе [1] показано, что даже при притертых плоских контактных торцах стержней Т и М одинаковых диаметров D линейное напряженное состояние в образце формируется на расстоянии хо=О, 6D.
На основании уравнения движения элемента образца длиной dx
9F(x,t) 9v(x,t)
—-—- dx = рл (x) —-—- dx,(1)
ЭхSt сила в контрольном сечении
F(-W>p ^^is^dx,(2)
О/ где p и S(x) - плотность и площадь поперечного сечения недеформированного стержня, v(x,t) -массовая скорость, Со = д/^/р —скорость распространения упругого фронта волны, Е - модуль упругости.
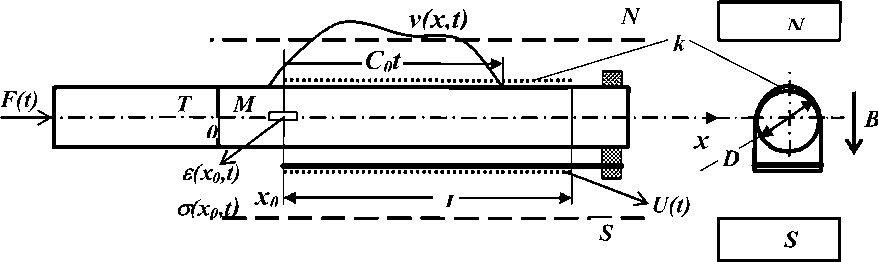
Рис. 1. Схемы нагружения образца М через стержень Т импульсом силы F(t) и установки датчиков для синхронного определения напряжения о(х0Д) и деформации £(х0Д) в контрольном сечении х0
Если при изготовлении образца площадь поперечного сечения в пределах его длины выдерживается с ошибкой не более 0,5 %, то можно принять S(x)=const.
По правилу дифференцирования интеграла по параметру (времени) имеем d Bv(x,t) . d^xp^)
— v(x, t) dx = ------- dx - v(C0Z, /)-------.(3)
dt Д Stdt
Учитывая, что v(Co4^=O, получим d
F(x0, t) = pS — f v(x, t)dx.
d,cl,
Для определения функции времени, представленной интегралом
J(xQ,t)- jv(x,0^9(5)
О/ разработан индукционный датчик [6], показанный на рис. 1.
Начиная от контрольного сечения х0, на образец намотана «виток к витку» однослойная катушка тонкого медного изолированного провода. Витки катушки к охватывают стержень и консольную планку, закрепленную на свободном конце образца. Часть каждого витка, примыкающая к образцу, приклеена к нему и движется со скоростью v(x,t) в поле постоянного магнита N-S. Участок, примыкающий к планке, неподвижен, а соединительные участки при движении не пересекают магнитный поток. Поэтому активная длина витка, в которой наводится ЭДС индукции, равна диаметру D образца. Длина магнита, в 1,5 раза большая длины катушки, и ширина, в 4 раза большая диаметра образца, обеспечивают неравномерность магнитного поля в пределах катушки датчика не более 1 %. Для сохранения однородности магнитного поля передающий стержень и образец изготовлены из немагнитных материалов. Сигнал ЭДС индукционного датчика
х0
J v(x,t)dx,
где В - магнитная индукция, и и L - количество витков и длина катушки датчика. На основании (4) и (6) сила в контрольном сечении
0 DBn dt условные напряжения
F(x0,t)
^о,0 = —~—•
Деформацию в контрольном сечении e(x0,t) определяют тензорезистором, база которого согласована с длиной фронта волны. Применение серийных фольговых тензорезисторов с базой 3 мм обеспечивает измерение деформаций до 5 %. В работе [7] показано, что для стержней из алюминия и стали (С0~5 мм/мкс) при длительности фронта импульса силы не менее 4 мкс, динамическая ошибка такого тензорезистора при определении максимального значения деформации в точке стержня, совпадающей с центром тензорезистора, не превышает 2 %. При определении немаксимального значения деформации на фронте и спаде импульса ошибка значительно меньше.
Если поперечным тензорезистором измерить поперечную деформацию, то можно определить фактическую площадь S(x^,t) и действительные напряжения
°/zOW) =
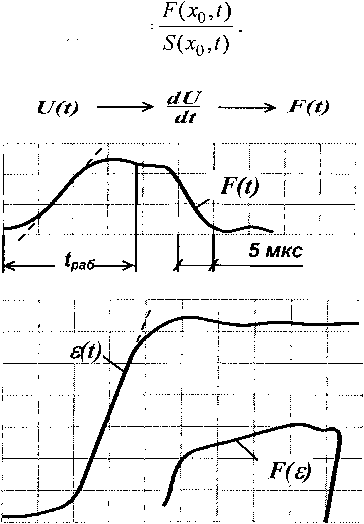
Рис. 2. Осциллограммы деформации e(t) и силы F(t) в контрольном сечении образца
На рис. 2 показаны типичные осциллограммы силы и деформации, полученные по данной методике и зарегистрированные на двух двухлучевых запоминающих аналоговых осциллографах С8-17.
Для получения сигнала F(t) сигнал индукционного датчика U(t) обрабатывали в дифференцирующем блоке dU/dt.
Один луч осциллографа регистрировал зависимость деформация-время s(x0,t). Второй луч в режиме X-Y одновременно регистрировал зависимость силадеформация F(e). Второй осциллограф регистрировал зависимость сила-время F (хоД), которую калибровали при упругом нагружении образца по сигналу F (x0,t)= e(xo,t)ES. Время регистрации силы ограничено длиной катушки датчика 1раб^Ь/С^.
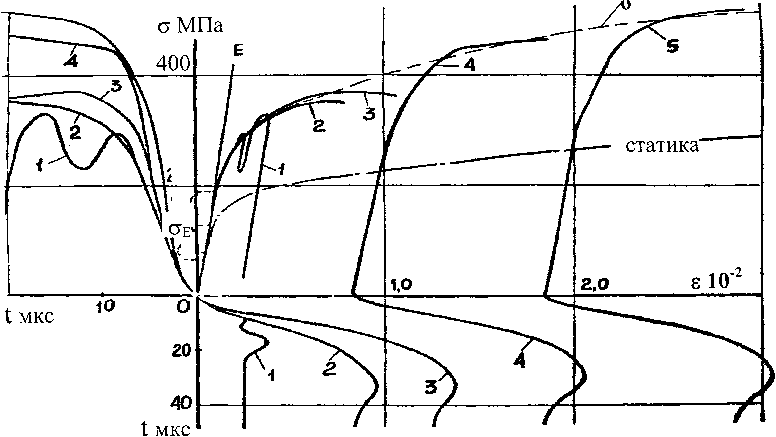
На рис. 3 приведены зависимости напряжение-деформация-время для алюминия АМц при сжатии стержней длиной 200 мм и диаметром 11,6 мм импульсами напряжений а(х0Д). Передающий стержень, таких же размеров как образец изготовлен из алюминия Д16Т с пределом пропорциональности 290 МПа. Для этих опытов tpa6=20 мкс. Там же показана статическая диаграмма сжатия образцов того же диаметра, высотой 20 мм.
Характерные закономерности процессов нагружения и деформирования проследим по рис. 3.
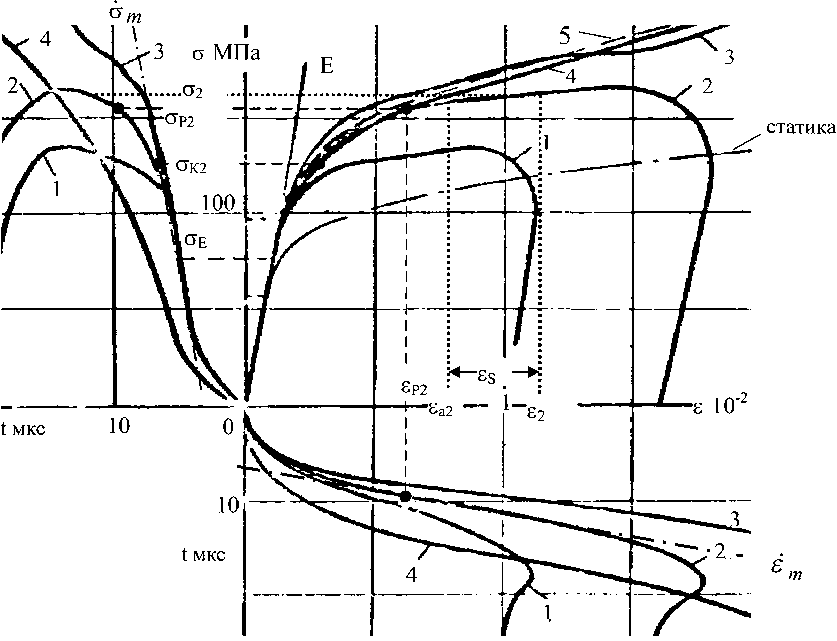
Рис. 3. Напряжение-деформация-время для алюминия АМц при режимах нагружения 1-4.
Зависимость 5 - среднее значение для семи образцов, испытанных по режиму 4
Зависимости напряжение-деформация определяли при четырех режимах нагружения j=l—4„ представленных осциллограммами напряжение-время. Соответствующие деформации представлены осциллограммами деформация-время. Штриховой линией 5 показана зависимость напряжение-деформация, осредненная по результатам испытаний 7 образцов в режиме нагружения 4.
Начальный режим нагружения характеризуется практически постоянной максимальной скоростью нагружения от , которая формируется при напряжениях, меньших предела пропорциональности с(1)<суе, и сохраняется при напряжениях, существенно превышающих предел пропорциональности. При испытаниях алюминия АМц реализовано дт = 3,3-107МПа/с . В этом режиме материал проходит два этапа деформирования, при которых увеличивается скорость деформации 8(7) > 0.
Первый этап - упругое деформирование г-о/Е, (10) ограниченное пределом пропорциональности сгЕ и характеризуемое модулем упругости Е.
В экспериментальной механике деформируемого твердого тела установлено, что для металлов и многих конструкционных материалов модуль упругости, определенный по результатам ультразвуковых измерений, практически совпадает со статическим значением. Наши измерения соответствуют этому результату.
Второй этап - пластическое деформирование, характеризующееся единой для всех режимов нагружения j=1-3 нелинейной зависимостью напряжение-деформация при действии напряжений °Е - °^Е - ^^j)- °Kj ■
Плавное уменьшение скорости нагружения относительно максимальной до значения
Gpj <д<дт
в интервале напряжений
cKj. < ^(tKj
В табл. 1 приведены скорости нагружения, реализованные при испытаниях алюминия АМц. В этих условиях для АМц dPj. > 0,4dw. Результаты аналогичного анализа: для алюминия АМгб dpj >0,156^ , для стали Х18Н1 ОТ QPj >0,36^ .
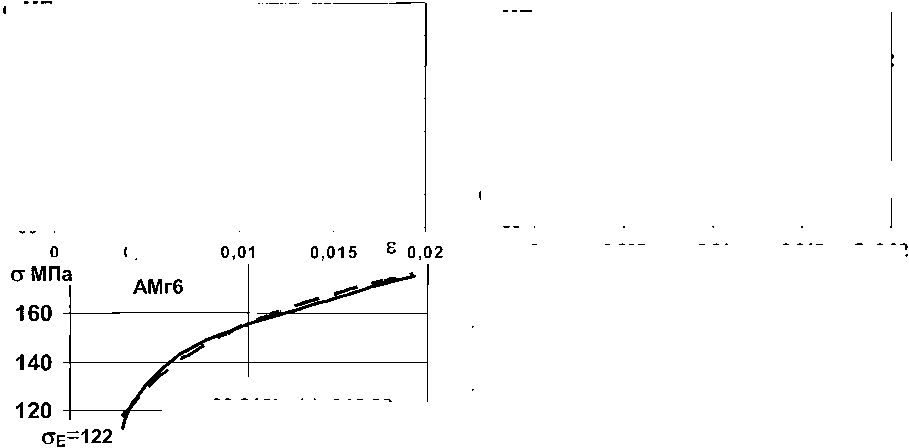
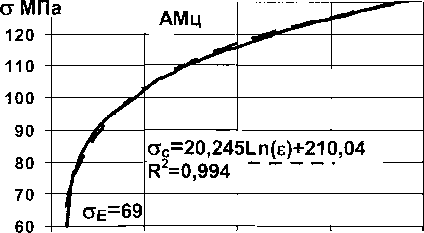
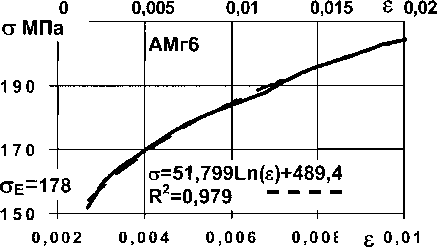
Пластические зависимости напряжение-деформация исследованных материалов при статическом (6^ < 1 МПа/с) сжатии (рис. 4, а) можно аппроксимировать уравнением а = ас h(s) + Ьс
(И)
1 2 > <тЕс - статический предел
, ^ ЕС где ас и Ьс - статические параметры материала, гЕС = —
Е пропорциональности.
Аналогичные зависимости получены при статическом растяжении нескольких марок конструкционных сталей.
Qc=30,316Ln(8)+316,08
R2 =0.994
0,005
а МПа
Х18Н10Т
100 40
q МПа
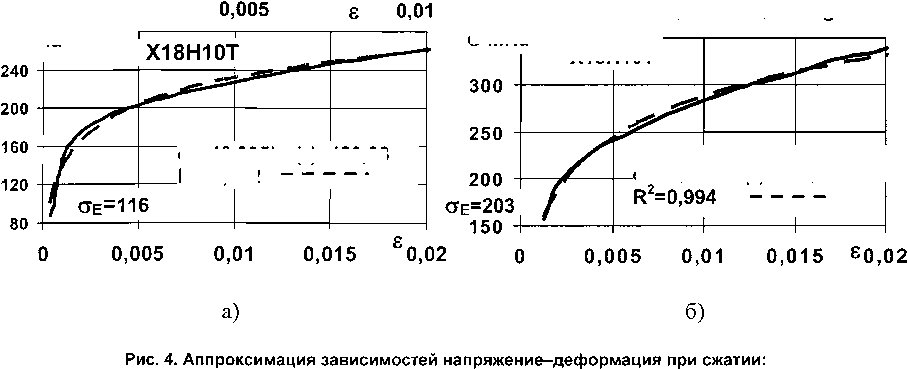
o.=40,895Ln(8)+420,03 R-0,982
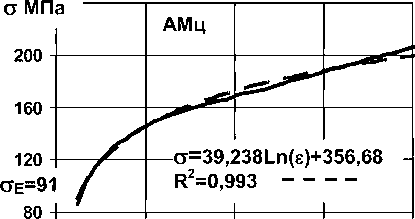
а - статика; б - скорость нагружения (3-9) 107 МПа/с
0=92,838Ln(e)+84O529
При импульсном нагружении (рис. 4, б) пластическую зависимость напряжение-деформация можно аппроксимировать аналогичным уравнением а = б/1п(8) + 6,
где а и Ъ - параметры материала при скорости нагружения др .
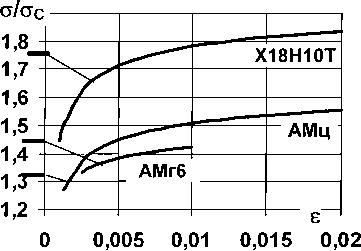
При пластическом деформировании в диапазоне напряжений аЕ < o(tE вующего конкретному режиму нагружения j=l—4. На основании (12) зависимость деформация-время еу(О = ехр v a > скорость деформации ёу(0 = о ДО (ajW-bA ——exp —--- a a соответст- В соответствии с условием аппроксимации aE < a < oPj максимальная скорость деформации Для алюминия АМц максимальные скорости деформации приведены в табл. 1. Деформация предела пропорциональности ее и параметры а и Ъ зависят от максимальной скорости нагружения су^ . Поэтому при пластическом деформировании зависимость напряже ние-деформация может быть описана уравнением /Д^еЛ,„) = 0- Напряжение aP. ограничивающее этап пластического деформирования, по физическому смыслу можно назвать пределом пластичности. На основании (11)и(12)с учетом (10) пределы пропорциональности при статическом и импульсном нагружениях определяем из уравнений: ^бс^сН^ес1 EVbc, (17) ge = aAn(cE /Е)л-Ь . (18) Таблица 1 Скорости нагружения и деформирования алюминия АМц Режим Нагружение Скорость нагружения, 106 МПа/с ^7Л03 1/с 6р 1 a 33 о > оР1 = O^j 4,5 U 2 О <0^-2 33 аХ2 - ст - °Р2 14 СУ > <3р2 3,6 1,9 3 а-°кз 33 aКЗ - a - °РЗ 8 су л сурз <8 2,8 4 о<сК4 20 °К4 ~ СТ - °Р4 8 СУ > СУ рд <8 1,9 Третий этап - деформирование при уменьшении скорости нагружения 0 < d(t) < др, происходит при напряжениях, больших предела пластичности, но не превышающих максимальное для заданного режима нагружения, cPj- < o(tPj Sy где tPj - время достижения напряжения GPj , увеличивается с постоянной максимальной скоростью 8^ (15), зависящей от режима нагружения. Для АМц в режиме 2 максимальная скорость деформации sw2 = 1,9 • 1031/с , т.е. сопротивление деформированию меньше, чем при пластическом деформировании. Как показано на рис. 3 (режим 2) общая деформация £2. вызванная напряжением <т2>(Ур2, равна сумме деформации 8а2, определяемой по уравнению (13), и дополнительной деформации 8S, зависящей от скорости нагружения 0 < а(/) < Gp . На основании (19) дополнительная деформация Ssj (0 = е7 (0 - еф = epj + smj (t - tPj) - exp где 8^- - exp '^2^? Для рассматриваемого примера j=2 и £S =^> Скорость дополнительной деформации При нагружении постоянным максимальным напряжением Gj (t>tM) = GMj = const a/Z > tMj) = 0 и дополнительная деформация является деформацией ползучести ^у (^м) = £pj + ^mj ^ -tpj)-6ХР ^м-Ь скорость которой равна гт] . Однако при этом вместо воздействия на материал повышенной температуры реализовано действие динамических напряжений, превышающих статические при заданной деформации. Поэтому дополнительную деформацию £S, можно назвать деформацией динамической ползучести. В работе [8] показана ползучесть стали при комнатной температуре при действии постоянных статических напряжений различного уровня. На основании (19) и (12) с учетом (15), (16) деформирование в режиме динамической ползучести может быть представлено уравнением Л(^Е^т^,?) = 0, где Gp При нагружении алюминия АМц по режиму 3 (рис. 3) на 8-й микросекунде произошло локальное резкое уменьшение скорости нагружения, которое отразилось локальной ползучестью. При увеличении скорости нагружения материал возвращается на пластическую зависимость напряжение-деформация. Четвертый этап деформирования - разгрузка. При разгрузке (а<сгм и G(t)< 0) деформация продолжает увеличиваться до максимального значения, но с уменьшающейся скоростью. При дальнейшем уменьшении напряжений происходит линейное уменьшение деформаций. Аналогичное явление ползучести при разгрузке было установлено в работе [9] при низких скоростях нагружения титанового сплава ВТ1-1. Полученные результаты испытаний образцов аустенитной стали Х18Н10Т. При режимах нагружения 2 и 3 выявили те же закономерности (рис. 5) пластического деформирования (динамической ползучести и разгрузки), что и при испытании образцов алюминия АМц, показанных на рис. 3. После нагружения по режиму 3 и разгрузки тот же образец был дважды испытан в режимах нагружения 4 и 5. При нагружении по режиму 4 увеличение напряжений до уровня сг3тах, с которого была проведена разгрузка режима 3, сопровождается упругим деформированием по уравнению (10). Но в этом случае предел пропорциональности сг£4«сг3тах. Дальнейшие пластическое деформирование, динамическая ползучесть и разгрузка происходят по законам первичного нагружения. Эти же явления имеют место и при нагружении по режиму 5 образца, испытанного в режимах 3 и 4. Ос-редненные результаты испытаний девяти образцов по этой программе, показанные пунктирной линией на рис. 5, соответствуют уравнению (12). При повторных нагружениях увеличиваются значения предела пропорциональности сг^ и предела пластичности о>, но сохраняются параметры уравнения (12). При о>оР проявляется ползучесть материала, как и при первом нагружении. Такая реакция металлов на повторное статическое нагружение известна как наклеп. При нагружении по режиму 1 в начале пластического деформирования была проведена частичная разгрузка с напряжения 1,8сге до напряжения 1,4о£ затем догрузка до 2,1 суе и полная разгрузка. Догрузка после частичной разгрузки продолжает процесс пластического деформирования. Следовательно, реакция материала на микросекундные изменения режима нагружения в виде наклепа такая же, как и при повторных нагружениях с интервалом в десятки минут. Рис. 5. Напряжение-деформация-время для стали Х18Н10Т при режимах нагружения 1-5. Линия 6 - среднее значение результатов испытаний 9 образцов Импульсные испытания стержневых образцов проводят в заданном режиме нагружения a(t), характерного для работы материала в конструкциях и при технологическом переделе. Деформация является реакцией материала на режим нагружения. Поэтому поведение материала обусловлено параметрами импульса напряжений: амплитудой, длительностью фронта, вершины и спада, скоростями нагружения и разгрузки. Параметры статического и импульсного нагружений испытанных материалов, осредненные по результатам испытаний 5-9 образцов, приведены в табл. 2. Наибольшее сопротивление материала импульсному деформированию - импульсное упрочнение реализуется на фронте импульса при максимальной скорости нагружения ат . На основании (12) и (11) импульсное упрочнение можно оценить отношением импульсного и статического напряжений, при которых реализуется одинаковая деформация 8>8Е, а aln(s) + Z? ос ас 1п(е) + Ьс На графиках импульсного упрочнения исследованных материалов (рис. 6) на оси ординат отмечены отношения импульсного и статического пределов пропорциональности Qe/gec (табл. 2). Рис. 6. Импульсное упрочнение а/стс для реализации деформации ^>8е Таблица 2 Параметры статического и импульсного нагружений испытанных материалов Материал АМц АМгб Х18Н10Т Е, 105МПа 0,724 0,723 1,94 Со? м/с 5100 5170 4950 р, 103кг/м3 2,78 2,68 7,92 Нагружение Статика Импульс Статика Импульс Статика Импульс 8 10'2* 2 1 2 а, МПа 20,245 39,238 30,316 51,799 40,895 92,838 Ь, МПа 210,04 356,68 316,08 489,4 420,03 840,29 R2 0,994 0,995 0,994 0,979 0,982 0,994 Не» МПа 69 91 122 178 116 203 ^Е^ЕС 1,32 1,46 1,75 £е, IO"2 0,095 0,13 0,17 0,25 0,06 0,1 dm, 106МПа/с 33 39 88 ^p/^m 0,24 0,16 0,3 8W, 1О31/С. 1,8 1,0 0,8 Диапазон логарифмической аппроксимации 8^ - 8max при 6т - ср Упрочнение алюминия АМц и стали Х18Н10Т интенсивно увеличивается до деформации 1%, затем при е>1,5% практически стабилизируется на уровне 1,55 и 1,85 соответственно. У алюминия АМгб импульсное упрочнение стабилизируется на уровне 1,42 при 6=1 %. Увеличение предела пропорциональности (ое/о£С>1) и импульсное упрочнение необходимо учитывать при разработке технологий обработки соответствующих материалов и при проектировании конструкций, работающих при волновом нагружении. Выводы 1. Применение разработанной методики синхронного определения напряжений и деформаций в контрольном сечении стержня-образца при распространении упругопластической волны обеспечивает детальное исследование процесса деформирования. 2. Экспериментально показано, что процесс деформирования зависит от напряжения и скорости нагружения. 3. Выявлены два последовательных вида деформирования: упругопластическое при постоянной максимальной скорости нагружения и динамическая ползучесть при уменьшении скорости нагружения и разгрузке. 4. Но применение методики ограничено возможностью испытаний только неферромагнитных материалов, которые не вносят искажения в равномерное магнитное поле индукционного датчика силы.
Список литературы К методике определения сопротивления материалов импульсному нагружению
- Купершляк-Юзефович Г.М. Методика измерения напряжений при импульсном нагружении стержня/Г.М. Купершляк-Юзефович, Ю.В. Шкербин//Проблемы прочности. -1981. -№ 1. -С. 41-45.
- Николас Т. Поведение материалов при высоких скоростях деформации/Т. Николас//Динамика удара: пер. с англ. -М.: Мир, 1985. -С. 198-256.
- Wang Li-Li. Influences of Stress Wave Propagation upon Studying Dynamic Response of Materials at High Strain Rates//Journal of Beijing Institute of Technology. -2004. -Vol. 13. -№ 3.
- Александров Е.В. Прикладная теория и расчеты ударных систем/Е.В. Александров, В.В. Соколинский. -М.: Наука, 1969. -200 с.
- Гольдсмит В. Удар и контактные явления при средних скоростях/В. Гольдсмит//Физика быстропротекающих процессов: сб. науч. тр. -М.: Мир, 1971. -Т. 2. -С. 153-201.
- A.c. 666447 (СССР). Датчик мгновенных значений механических напряжений в образце/Г.М. Купершляк-Юзефович, Ю.В. Шкербин. -Приоритет 19.04.1977; опубл. Б.И., 1979, № 21.
- Купершляк-Юзефович Г.М. Оценивание погрешностей измерения динамических деформаций тензорезисторами/Г.М. Купершляк-Юзефович//Датчики и системы. -2003. -№ 9. -С 8-11.
- Жуков A.M. Некоторые особенности поведения металлов при упругопластическом деформировании/A.M. Жуков//Вопросы теории пластичности: сб. науч. тр. -М.: Издательство АН СССР, 1961. -С. 30-57.
- Викторов В.В. Математическое и экспериментальное моделирование влияния временных и скоростных эффектов на механическое поведение материалов/В.В. Викторов, В.Н. Кукуджанов//Труды IX конференции по прочности и пластичности. -М.: Издательство РАН, 1996. -Т. 2. -С. 45-51.
