К обоснованию и разработке новой конструкции самоходного полока для условий подземных рудников

Автор: Абдрахимов У.Т.
Журнал: Вестник Алматинского технологического университета @vestnik-atu
Рубрика: Социально-гуманитарные науки
Статья в выпуске: 1 (97), 2013 года.
Бесплатный доступ
В статье предлагается новая конструкция промышленного полока для осмотра кровли шахт. Особенностью данного механизма является то, что он по своей структуре относится к группе Ассура высокого класса, что обуславливает простоту в управлении и надежность конструкции. Для данной конструкции производится синтез и анализ направляющего механизма.
Технология, механизм, эффективный, синтез, анализ
Короткий адрес: https://sciup.org/140204622
IDR: 140204622 | УДК: 622.23.05:622.34(07)
Текст научной статьи К обоснованию и разработке новой конструкции самоходного полока для условий подземных рудников
Нефтегазовая и горно-металлургическая, энергетическая и транспортно-логистическая и другие отрасли экономики Казахстана остро нуждаются в продукции машиностроения. Поэтому, развитое машиностроение является основополагающей для успешной реализации программы индустриальноинновационного развития экономики страны. Рычажные механизмы широко представлены в современных автоматах, робототехнических устройствах и автоматических линиях, используемых в различных отраслях машиностроения. С помошью таковых механизмов обычно осуществляется заданное программное движение рабочих органов и обрабатываемых изделий. В частности, в горнорудной промышленности нашли широкое применение самоходные оборудования (самоходные машины с комплеском навесного обору- дования). В работе [1] разработана универсальная конструкция шасси вспомогательного оборудования и произведена адаптация импортного шасси к условиям рудников Казахстана с поэтапным импортозамещением сборочных единиц. Спроектирована конструкция самоходного полока на базе разработанного шасси, которая представляет в структуре прямолинейно-направляюший механизм IVкласса по классификации И.И. Артоболевского. В этой же работе приведены результаты инженерного расчета основных кинематических и конструктивных параметров самоходного полока новой конструкции, подтвердившие эффективность и надежность новой машины.
Обьекты и методы исследований
В традиционных промышленных манипуляторах исполнительные органы (механизмы) состоят из открытых кинематических цепей, каждое звено которых приводится в движение отдельным двигателем, установленным в шарнире. Тяжесть перемещаемого груза, захватного устройства и приводных двигателей воспринимается отдельным шарниром, что значительно тормозит производительность машины. Кроме того, из-за консольности конструкции звеньев довольно трудно поднять грузоподъемность манипуляторов, обеспечить их быстродействие и упростить систему управления ими. Использование замкнутых кинематических цепей, в особенности механизмов высоких классов (МВК), в качестве исполнительных механизмов манипуляторов устраняет отмеченные недостатки. Именно данное утверждение было доказано авторами в работах [1,2,3]. На рис 1 приведена структурная схема навесного оборудования, разработанного в качестве самоходного полока для горношахтных работ.
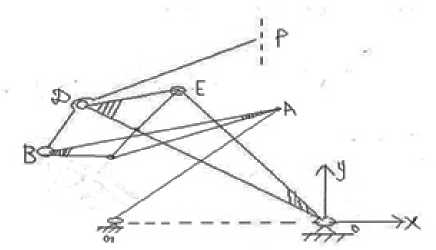
Рисунок 1 – Структурная схема навесного оборудования, используемого в качестве самоходного полока.
Однако, как это видно из рис.1, данная конструкция не до конца отвечает требованиям компактности и оптимальной передачи усилий в звеньях.
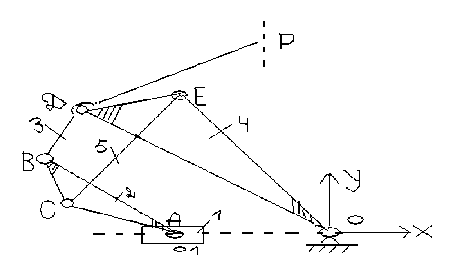
Рисунок 2 - Прямолинейно-направляюший меха- низм IV класса.
На рис.2 представлен разработанный эффективный прямолинейно-направляюший механизм IV класса (по классификации Ассура), обеспечивающий компактность при складывании и позволющий оптимально разрешить проблему нежелательного эффекта "циркуляции мощности" в замкнутых контурах.
МВК, благодаря своим структурным особенностям (наличие изменяемых замкнутых контуров), обладают большими кинематическими и динамическими возможностями при реализации заданных траекторий движения рабочих органов. Манупуля-ционные устройства, созданные на базе МВК, имеют высокую точность позиционирования и большую грузоподъемность вследствие большей жесткости конструкции и за счет распределения сил по контурным звеньям.
Одна из особенностей МВК – широкий диапазон изменения отношений перемещений рабочей точки и ведущего звена при сравнительно малых габаритных размерах в нерабочем положении. Эта особенность позволяет создавать на их базе передвижные грузоподъемные устройства (ГУ), представляющие собой манипуляторы с одной степенью свободы (автооператоры).
Результаты и их обсуждения
На рисунке 2 представлен разработанный эффективный прямолинейно-направляющий механизм, на базе которого предложена новая конструкция промышленного полока. Механизм включает входное звено 1, двухшарнирный промежуточный шатун 5, основное коромысло (трехшарнирное) 4, трехшарнирный рычаг 2 и основной выходной трехшарнирный шатун 3. В данной конс- трукции входное звено получает поступательное движение от гидроцилиндра. Это эвено воздействует на трехшарнирный рычаг, заставляя его поворачиваться. К оставшимся двум сторонам рычага прикреплены два шатуна. Первый шатун воздействует на трехшарнирное коромысло, при этом оно совершает вращательные движения относительно точки О. Второй шатун является выходным.
По своей структуре механизм включает входное звено 1 со стойкой, структурную группу Ассура IV класса ABCDEO
I (1) IV —► класса (2,3,4,5) ,
Перемещение звена 1 относительно шарнира О вызывает прямолинейное вертикальное перемещение рабочей точки Р.
Задача кинематического синтеза данного механизма решается следующим образом. Задаемся из габритных соображений начальным значением S OP = OPH, и координатой начальных точек О и О1 в системе координат ХОУ (рисунок 2)
м
^01
АВ = I AB COS флв
Jab ^Vm
О
О cosp, sinp.
О
COS^S
^Рла
О -sin^ , cos^.
О
~sin РХ8
-С05рлд
где последняя матрица определяет значения искомых моментов.
Углы положений звеньев φ1 и φ АВ в матрицах Z01 и МАВ определяются из уравнений замкнутности треугольников ОО1 А и АВР по соотношениям
Задавшись траекторией точки Р и длинами звеньев открытого четырехзвенника О1АВDР, определим круговую квадратическую точку D в плоскости ВР:
1 Хв у.
где Хв и У в - координаты точки В; ХА и УА - координаты точки А;
м
1 о о
- момент от вращения.
1 Г1'
^ +МЛд О
/J к
I 2 2 — 7 2
Флв =
'ah
Лишняя степень свободы пятизвенника О1 А ВDО исключается соединением плоскостей АВ и ОD допоплнительным шатуном ЕС. Для этого необходимо определить в обращенном движении (при неподвижной плоскости ОD) круговую квадратическую точку С в полоскости АВ и ее центр Е в полоскости ОD. Параметры неподвижной плоскости АВ в обращенном движении
' И Г i 1

Величина угла при известных координатах орпеделяется по формуле:
О " -sin Pod , " 00 8 Poo ।
Фнр = Wctg

в которых φОД определяет положение звена ОД.
Координаты шарнира D
где Хр и Ур - координаты выходной точки Р.
Координаты точки А можно найти через заданный центр вращения О по формулам
где φВР - угловое положение звена ВР.
В результате квадратического синтеза получим механизм высокого класса с группой Ассура I V класса второго порядка, ведущее звено 1 которого, перемещаясь относительно заданной шарнирной точки О, перемещает в итоге рабочую точку Р выходного звена 3 по прямолинейной траектории. В процессе синтеза заданными являются следующие параметры координаты точек О и О1, амплитуда вращения входного звена 1 и поставленная им в соответствие перемещение точки Р по прямой траектории, начальные длины звеньев О1 А, АВ, ВР, О1О. Подлежали определению положения круговой квадратической точки D на звене ВР и круговой квадратической точи С на звене АВ и соответствующего ей центра Е на звене ОD.
Выводы
В результате исследований в работе предложена новая, более эффективная конструкция механизма полока на базе направляющего механизма высокого класса с ведущим звеном в виде ползуна, что обеспечило не только удобную компоновку механизма подьема, но и позволило увеличить грузоподьемность машины в целом.
Список литературы К обоснованию и разработке новой конструкции самоходного полока для условий подземных рудников
- Абдрахимов У.Т., Кузьмин С.Л. Разработка конструкции самоходного полока для горнорудных предприятий РК./Материалы 65 научно-технической конференции, посвященной 75-летию Магнитогорского металлургического комбината, Магнитогорск, 2007. -С. 259-263.
- Абдрахимов У.Т., Жантурин М.Ж., Кузьмин С.Л. Проектирование самоходного полока для горнорудных предприятий РК.//Горный журнал Казахстана. -2009. -№2. -С. 13-15.
- Абдрахимов У.Т., Кузьмин С.Л. Кинетостатический анализ шахтного самоходного оборудования./Материалы международной научной конференции, “Состояния и перспективы развития машиностроения в Казахстане”. -Алматы. 2007. -С.239-245.
