К проблеме управляемости в системах с обратной связью

Автор: Клименко Игорь Семенович, Баскаков Алексей Андреевич, Шарапова Людмила Викторовна
Рубрика: Управление сложными системами
Статья в выпуске: 1, 2020 года.
Бесплатный доступ
Проведен анализ условий сохранения управляемости в системах с обратной связью на основе привлечения принципа необходимого разнообразия Эшби. Показано, что при выполнении процедур оперативного управления, обеспечивающего рутинное функционирование систем, задача сохранения управляемости сводится к выполнению условий изоморфизма множества его состояний и множества управляющих воздействий. При реализации иерархического управления, протекающего в условиях неполной определенности, возрастает вероятность возникновения положительной обратной связи, что может приводить к дальнейшему росту неопределенности и в конечном итоге к потере управляемости.
Обратная связь, принцип необходимого разнообразия эшби, энтропия, неопределенность сообщений
Короткий адрес: https://sciup.org/148309065
IDR: 148309065 | УДК: 517.977 | DOI: 10.25586/RNU.V9187.20.01.P.084
To the problem of controllability in feedback systems
The analysis of the conditions for maintaining controllability in feedback systems based on the involvement of the principle of Ashby’s necessary diversity is carried out. It is shown that when performing operational control procedures that ensure the routine functioning of systems, the task of maintaining controllability is reduced to fulfilling the conditions of isomorphism of the set of its states and the set of control actions. In the implementation of hierarchical management, proceeding under conditions of incomplete certainty, the probability of positive feedback arises, which can lead to a further increase in uncertainty and, ultimately, to a loss of controllability.
Текст научной статьи К проблеме управляемости в системах с обратной связью
Управление сложными организационно-техническими системами предполагает привлечение принципа необходимой иерархии, основанного на устойчивом функционировании обратной связи. Рост сложности задач, в первую очередь связанных с разработкой инновационных стратегий управления, естественным образом требует увеличения сложности структуры управления.
В свою очередь, усложнение структуры управления приводит к росту степени неопределенности относительно ситуации принятия управленческих решений. Как следствие, возрастает риск принятия ошибочных решений, уводящих систему с оптимальной траектории движения к цели вплоть до потери управляемости.
Как правило, потеря управляемости свидетельствует о том, что система имела меньшее разнообразие, чем проблема, или, иными словами, количество информации об источнике проблемы и ее природе было недостаточным для выбора адекватного управляющего воздействия.
Принцип необходимого разнообразия Эшби и его место в теории управления
Принцип необходимого разнообразия, сформулированный в 1956 г. Уильямом Россом Эшби в книге “An Introduction to Cybernetics” [10], гласит: чтобы эффективно управлять системой, которая характеризуется определенной степенью разнообразия, необходимо, чтобы сама управляющая система обладала не меньшим разнообразием. Формально этот закон принято представлять, используя понятие энтропии:
H ( X / Y ) = H ( Y ) max - H ( X ) + H ( Y / X ) , (1)
где H ( X / Y ) – количество энтропии, отображающей степень несоответствия управляющих воздействий реальным состояниям объекта управления (ОУ); H ( Y ) max - количество энтропии, характеризующее разнообразие возможных состояний ОУ или степень неопределенности для ЛПР УС относительно реального состояния ОУ; H ( X ) - количество энтропии, характеризующее разнообразие управляющих воздействий, которым располагает ЛПР УС; H ( Y / X ) – количество энтропии, отображающей степень несоответствия сведений, поступающих из ОУ, его реальным состояниям.
Из (1) следует известный вывод о том, что повышение эффективности управления может быть обеспечено уменьшением H ( Y ) m ax и H ( Y / X ) , а также увеличением H ( X ) .
Следует подчеркнуть, что при сопоставлении разнообразия, отображаемого H ( X ) и H ( Y ) max, молчаливо подразумевается, что между множествами возможных состояний ОУ и управляющих воздействий, которыми располагает ЛПР УС, должна существовать высокая степень соответствия.
86 в ыпуск 1/2020
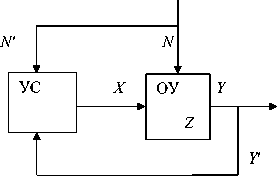
Риc. 1. Общая структурная схема системы с управлением:
X – множество управляемых воздействий; N – множество неуправляемых (внешних) воздействий; Z – множество внутренних состояний ОУ; Y – множество выходов ОУ; Y ʹ – подмножество выходов, известных в УС; N ʹ – подмножество неуправляемых воздействий, известных в УС
Рассмотрим структуру системы с управлением (рис. 1).
Пусть X = { x 1 , x 2, .^,x n } - множество управляющих воздействий, которыми располагает ЛПР УС, Z = { z 1 , z 2, . . , z n } - множество возможных состояний, определяющих разнообразие ОУ а Y = { у 1 , у 2, . . , y n } - множество соответствующих выходных сигналов, поступающих в УС.
В случае если ОУ является полностью наблюдаемым (решена обратная задача управления), то множество Y = { у 1 , у 2 , ..., y n } однозначно детерминировано множеством Z = { z 1 , z 2, . . , z n } , т.е. имеет место изоморфное отображение Z в Y . Если при этом множество фиксировано и не может пополняться, то ЛПР УС может однозначно судить о текущем состоянии ОУ по соответствующему выходу ОУ.
Следовательно, условием идеального управления является выполнение отношения изоморфизма множеств X = {x 1,x2, ...,xn} и Y = {у 1,у2, ...,yn}. Это означает, что каждому состоянию ОУ должно соответствовать только одно вполне определенное, адекват- ное ему управляющее воздействие.
Подобные условия могут быть обеспечены в случае, когда ОУ не подвержен воздействию внешней среды и процесс управления можно считать детерминированным, т.е. проходящим в условиях полной определенности. Тогда закон функционирования ОУ обусловлен только его начальным состоянием z 0 и последовательностью управляющих воздействий X = { x 1 , x 2 , .., x n } :
Y = f ( z о , X ) . (2)
В таких условиях сообщения, поступающие в УС, несут полную информацию о состояниях ОУ, поэтому формально H ( Y / X ) = 0 и, следовательно, ЛПР УС имеет возможность выбрать в текущем цикле управления адекватное управляющее воздействие, что обеспечивает выполнение условия H ( X / Y ) = 0. Тогда
H ( X ) = H ( Y ) max . (3)
В частности, таким условиям соответствует выполнение процедур оперативного управления, обеспечивающего рутинное функционирование ОУ, параметры которого остаются неизменными в процессе управления.
Поскольку каждому состоянию ОУ соответствует одно и только одно управляющее воздействие, то лишь диагональные элементы матрицы эффективности будут иметь единичные значения, а все остальные – нулевые (табл. 1).
Клименко И.С., Баскаков А.А., Шарапова Л.В. К проблеме управляемости... 87
Очевидно, что использование того или иного управляющего воздействия не по назначению приводит к существенному уменьшению эффективности управления. Очевидно также, что отсутствие хотя бы одного из необходимых управляющих воздействий чревато потерей управляемости, т.е. невозможностью перевода ОУ в требуемое состояние в определенном цикле управления.
Таблица 1
Оценивание эффективности однозначного управления
|
x j |
yi |
|||
|
y 1 |
y 2 |
yi |
yn |
|
|
x 1 |
1 |
0 |
0 |
0 |
|
x 2 |
0 |
1 |
0 |
0 |
|
x j |
0 |
0 |
1 |
0 |
|
x n |
0 |
0 |
0 |
1 |
В общем случае, т.е. в условиях неполной определенности , ситуация принятия решения существенно усложняется. Постановка общей задачи принятия решений характерна для проблемной ситуации, в которой ЛПР оказывается перед необходимостью осуществить выбор наилучшей альтернативы в условиях не только высокой неопределенности, но и ограниченного лимита времени [6].
В совокупности множество управляемых воздействий X и множество неуправляемых воздействий N образуют множество входных воздействий, которое обозначим W = < X , N >. В общем случае W порождает множество Z внутренних состояний ОУ, которое, в свою очередь, порождает множество выходных сигналов Y . По тем или иным причинам для ЛПР наблюдаемым оказывается некоторое подмножество Y* выходных сигналов, поскольку некоторые выходные сигналы для ЛПР могут быть ненаблюдаемыми, а некоторые из них ЛПР может при выборе решения счесть несущественными и вывести из рассмотрения.
При этом, как правило, возникает задача адаптивного управления динамической системой, решение которой достигается посредством изменения параметров и/или структуры УС, в частности приобретения ею недостающего управляющего воздействия, т.е. увеличения ее разнообразия в части наличия необходимых ресурсов управления (множество X ).
Следует подчеркнуть, что в рамках рассматриваемой задачи в первую очередь анализируются информационные ресурсы: знания ЛПР и вычислительные ресурсы информационных систем.
Время, которым располагает ЛПР на принятие решения, определяет такой частный показатель эффективности, как оперативность управления, и выделяется в самостоятельный ресурс в силу существования неоднородной (векторной) связи между оперативностью и ресурсоемкостью. Наличие такой связи представляет собой неотъемлемый признак сложной системы, поэтому оптимизация соотношения время/ресурсы представляет собой характерную задачу обеспечения эффективности процесса управления в зависимости от целей управления и отношения ЛПР к риску [3].
88 в ыпуск 1/2020
Оценивание эффективности управления в условиях неполной определенности
Эффективность системы с управлением является операционной характеристикой ее функционирования, а ее обобщенный показатель интегрирует три частных показателя: результативность Y рез, оперативность Y оп и ресурсоемкость Y рес:
Y = Y , Y , эфф рез оп
В условиях неопределенности (и порождаемого ею риска) оценивание эффективности основано на использовании понятия вероятности достижения цели. При этом операция считается эффективной [1], если вероятность достижения цели по обобщенному показателю эффективности равна вероятности достижения цели с оптимальным значением этого показателя:
доп
дц (^ эфф ) ^Дц(^ эфф ) .
Очевидно, что риск, связанный с принятием решения и реализацией соответствующего управляющего воздействия, обусловлен в основном неполной наблюдаемостью ОУ и обстановки, т.е. неполным соответствием данных, имеющихся у ЛПР УС относительно ситуации принятия решения, ее реальному состоянию. Такая ситуация характерна для управленческих задач планирования и прогнозирования, связанных с необходимостью снятия неопределенности относительно структуры и поведения ОУ, обусловленной его количественными и/или качественными изменениями.
На уровне тактического управления решаются задачи снятия неопределенности относительно структуры ОУ, т.е. пополнения множества управляемых воздействий в связи с количественными изменениями параметров текущего состояния ОУ. На уровне стратегического управления речь идет о снятии неопределенности относительно структуры и обусловленного ею поведения ОУ в отдаленной перспективе в связи с прогнозируемыми качественными изменениями обстановки.
В таких условиях различные управляющие воздействия, в том числе приобретаемые УС в связи с развитием и/или эволюцией ОУ, будут обладать различной степенью эффективности по отношению к тем или иным состояниям ОУ в пределах от нуля до единицы, т.е. k .. Е [ 0,1 ] . Соответственно, матрица эффективности приобретает следующий вид (табл. 2).
Таблица 2
Оценивание эффективности управления в условиях неполной определенности
|
x j |
yi |
|||
|
y 1 |
y 2 |
yi |
yn |
|
|
x 1 |
k 11 |
k 12 |
k 1 i |
k 1 n |
|
x 2 |
k 21 |
k 22 |
k 2 j |
k 2 n |
|
x j |
k j 1 |
kj 2 |
kj 3 |
k jn |
|
x n |
k n 1 |
k n 2 |
k nj |
k nn |
При этом уже только некоторые управляющие воздействия могут по-прежнему обладать полной или нулевой эффективностью по отношению к соответствующим состояниям ОУ, множество которых, естественно, будет пополняться.
Клименко И.С., Баскаков А.А., Шарапова Л.В. К проблеме управляемости... 89
В реальной практике управления ЛПР УС, ориентируясь на выполнение критерия оптимальности по обобщенному показателю эффективности (4), может выбрать решение ограничиться выполнением критерия пригодности, согласно которому операция считается эффективной, если вероятность достижения цели по обобщенному показателю эффективности окажется не меньше допустимой вероятности достижения цели по этому показателю:
Р (y ^J > Р (у д°п\ дц эфф дц эфф
При этом, в силу существования неоднородной связи между оперативностью и ресур-соемкостью, оптимизация по обобщенному показателю эффективности будет направлена на достижение их наилучшего с точки зрения ЛПР УС соотношения при непременном условии достижения цели.
В случае достижения качественной цели эффективность определяется оптимальным соотношением результирующих показателей оперативности и ресурсоемкости в зависимости от того, какой из них является целевым, а какой играет роль ограничения.
В случае количественной цели результативность Y рез оценивается по степени достижения целевого эффекта. В условиях риска ЛПР УС может установить допустимую степень достижения цели, а в отношении показателей оперативности и ресурсоемкости, в зависимости от конкретных условий управления, варьировать их соотношением [6; 8].
Так, например, ЛПР УС может выбрать не самое результативное, но наиболее экономичное решение при условии обеспечения приемлемой оперативности. Тогда условие оптимальности будет выглядеть следующим образом:
опт
Y эфф
= Y доп Y доп Y опт рез , оп , рес
Действительно, в реальной практике управления в условиях неполной определенности разные ЛПР, реализуя принцип свободы выбора решения, в одной и той же ситуации будут принимать решения о выборе управляющих воздействий в соответствии со своими индивидуальными оценками степени допустимого риска решений в конкретных ситуациях.
Влияние положительной обратной связи на эффективность управления в иерархических системах
Один из важнейших аспектов проблемы управляемости связан с управлением сложными организационными и организационно-техническими системами, обладающими разветвленной иерархией. Управление сложными многоуровневыми системами предполагает выполнение принципа необходимой иерархии, основанного на устойчивом функционировании обратной связи.
Иерархическое управление (рис. 2) получило широкое распространение в организационных системах с высокой неопределенностью относительно ситуации принятия решений. В силу высокой сложности таких систем взаимодействие между уровнями иерархии, как правило, не поддается формализации и ЛПР УС нередко приходится при выборе решений использовать, наряду с расчетными и логическими, эвристические процедуры.
Рассмотрим иерархическую систему с позиции известной организационной модели менеджмента – треугольника Энтони [9], имеющего три уровня иерархии: стратегический, тактический и оперативный.
90 в ыпуск 1/2020
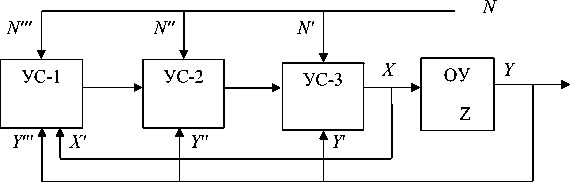
Рис. 2. Иерархическое управление:
УС-1 – управляющая система стратегического уровня иерархии; УС-2 – управляющая система тактического уровня иерархии; УС-3 – управляющая система оперативного уровня иерархии;
X ʹ – подмножество управляемых воздействий, УС-1, известное в УС-3; Y ʹʹ –подмножество выходов ОУ, известное в УС-2; Y ʹʹʹ – подмножество выходов ОУ, известное в УС-1;
N ʹʹ – подмножество неуправляемых воздействий (неконтролируемых входов ОУ), известное в УС-2; N ʹʹʹ – подмножество неуправляемых воздействий (неконтролируемых входов ОУ), известное в УС-1
-
1. На стратегическом уровне иерархии любое решение носит долгосрочный характер и определяет путь развития организации. Это может быть долгосрочное инвестирование, план по расширению, слиянию компаний и т.д.
-
2. На тактическом уровне иерархии стоят среднесрочные цели о том, как достичь стратегических задач, какие потребуются ресурсы, какие есть ограничения и т.п.
-
3. На оперативном уровне иерархии решаются вопросы конкретных задач, цели, как правило, краткосрочные, например, вопросы заработных плат, жалобы, клиентский опыт и т.д.
В таких системах управляемость ОУ в значительной мере зависит от степени достоверности сведений об их состоянии, поступающих с нижних уровней иерархии, на основе которых принимаются решения тактического и стратегического уровней. Поэтому на первый план выдвигаются такие функции управления, как организация и координация, а также функции управления, связанные с учетом человеческого фактора.
При этом возникает проблема определения ценности информации, несомой сообщениями, которыми обмениваются субъекты информационных процессов управления. Для ЛПР верхних и средних уровней иерархии критически важно выделять для принятия решений достоверные сведения, отсеивая составляющие сообщений, несущие информационный шум и/или дезинформацию [4].
В противном случае возникает угроза возникновения положительной (усиливающей) обратной связи, приводящей к нарастанию неопределенности ситуации принятия решения. Как следствие, при этом возрастает степень несоответствия принимаемых решений и, следовательно, управляющих воздействий реальному состоянию ОУ и обстановки, что ведет к дальнейшему росту неопределенности и в конечном итоге к потере управляемости.
Сущность действия положительной обратной связи состоит в том, что появление в системе отклонения от стабильного состояния служит сигналом для циклического нарастания этого отклонения [7].
Вернемся к соотношению (1) и рассмотрим слагаемое H ( Y / X ) , отражающее степень несоответствия поступающего в УС сообщения относительно состояния ОУ его реаль-
Клименко И.С., Баскаков А.А., Шарапова Л.В. К проблеме управляемости... 91
ному состоянию. Причиной такого несоответствия могут быть два фактора: технический и человеческий.
Проблема борьбы с помехами в каналах связи изучена обстоятельно и представляет самостоятельный интерес, выходящий за рамки настоящей работы. Ее решение состоит в обеспечении передачи сообщений без помех, в первую очередь от ОУ к УС, поскольку несоответствие между предполагаемым ЛПР УС и реальным состоянием объекта управления будет автоматически приводить к выработке неадекватных управляющих воздействий.
Что же касается роли человеческого фактора, то в организационных системах он играет весьма существенную роль. Дело в том, что источниками несоответствия сведений, поступающих из ОУ, его реальным состояниям могут быть как минимум три причины: некомпетентность ЛПР тех или иных уровней иерархии, разовые ошибочные решения и сознательное искажение сведений относительно реальной ситуации. В общем случае
H ( Y / X ) = H ( Y )1+ H ( Y X + H ( Y )з, (7)
где H ( Y )1, H ( Y )2 и H ( Y )3 – остаточная энтропия сообщения, обусловленная соответственно неточностью , неполнотой отображения реального состояния ОУ, а также его смысловым искажением.
Следствием некомпетентности и ошибочных решений оказываются неточность и неполнота сведений, которые можно расценивать как информационный шум или аддитивную помеху [4]. Однако нередки случаи сознательной дезинформации ЛПР УС со стороны ЛПР ОУ разного уровня иерархии, что не только чревато снижением эффективности функционирования систем, но и может приводить к серьезным негативным последствиям [2; 5]. При качественном оценивании масштаба негативных последствий решений, принятых на основе неточных и неполных, а также сознательно искаженных сведений, представляется целесообразным руководствоваться соотношением Парето, т.е. 20% отрицательных результатов отнести на неточность и неполноту сведений и 80% – на их умышленное искажение.
В силу таких особенностей иерархическая организационная система имманентно подвержена нарастающей дезинформации, что не только чревато уходом системы с траектории, ведущей к цели, но и потерей управляемости, когда на нижних уровнях иерархии ЛПР начинают преследовать цели, не соответствующие целям системы. Действительно, если на стратегическом уровне были поставлены задачи для тактического, смысл которых был искажен или неадекватно интерпретирован, то на оперативный уровень поступят управляющие воздействия, неадекватные его реальному состоянию. В системе управления возникает характерная положительная (усиливающая) обратная связь. Отработка неадекватного воздействия будет уводить ОУ с траектории, ведущей к цели. Возвращение на оптимальную траекторию потребует дополнительных ресурсов и времени вплоть до их преждевременного исчерпания.
Например, частная компания поставила перед собой долгосрочную задачу нарастить объем инвестиций в акции одной из государственных компаний. Если на тактическом уровне риски необоснованно будут оценены оптимистично, то будет сделан вывод о том, что бюджета достаточно для инвестиций. Тогда на стратегическом уровне будет принято решение вложить часть бюджета в эти акции незамедлительно, отодвинув на будущее рас-
92 в ыпуск 1/2020
ширение компании, которое в долгосрочной перспективе планируется покрыть за счет выгоды от вложений.
Однако если акции рискованные, то существует большой риск потерять не только деньги, вложенные в них, но и лишиться средств для расширения, так как это расширение нечем будет обеспечить.
Заключение
Анализ ситуации принятия решений на основе принципа необходимого разнообразия показывает, что в условиях нарастающей неопределенности повышается вероятность потери управляемости систем, выступающих в качестве объектов управления.
При выполнении процедур оперативного управления, обеспечивающего рутинное функционирование систем, условие сохранения управляемости состоит в обеспечении изоморфизма множества его состояний и множества управляющих воздействий. В условиях организационно-иерархического управления возрастает роль человеческого фактора, потенциально способствующего накоплению неопределенности вследствие действия положительной обратной связи. В конечном итоге может возникнуть «эффект снежного кома» и, соответственно, угроза потери управляемости.
Поэтому возрастает значимость функций контроля и анализа, в ходе которых ЛПР верхних уровней способны выступать в роли экспертов и корректировать содержание и смысл сообщений, поступающих с нижних уровней иерархии.
Список литературы К проблеме управляемости в системах с обратной связью
- Анфилатов В.С., Емельянов А.А., Кукушкин А.А. Системный анализ в управлении: учебное пособие. М.: Финансы и статистика, 2005. 367 с.
- Клименко И.С. К интерпретации принципа необходимого разнообразия Эшби применительно к управлению в социально-экономических системах // Вестник Российского нового университета. Серия "Сложные системы: модели, анализ и управление". 2012. Вып. 4. С. 45-47.
- Клименко И.С. Теория систем и системный анализ: учебное пособие. М.: РосНОУ, 2014. 256 с.
- Клименко И.С., Белова Н.А., Шарапова Л.В. К проблеме определения ценности информации // Вестник Российского нового университета. Серия "Сложные системы: модели, анализ и управление". 2018. Вып. 2. С. 54-62.
- Клименко И.С., Коровко П.Г., Шарапова Л.В. К проблеме оценивания качества управленческих решений и эффективности управления // Вестник Российского нового университета. Серия "Сложные системы: модели, анализ и управление". 2017. Вып. 1. С. 53-57.
- Клименко И.С., Шарапова Л.В. Общая задача принятия решения и феномен неопределенности // Вестник Российского нового университета. Серия "Сложные системы: модели, анализ и управление". 2019. Вып. 3. С. 44-56.
- О'Коннор Дж., Макдермотт И. Искусство системного мышления / пер. с англ. М.: Альпина Бизнес Букс, 2006. 256 с.
- Фрайманн А.В. Об особенностях применения принципа необходимого разнообразия для отображения функций системного администратора // Вестник Российского нового университета. Серия "Сложные системы: модели, анализ и управление". 2019. № 2. С. 64-69.
- Anthony R.N. Planning and Control: A Framework for Analysis. Cambridge: Harvard University Press, 1965.
- Ashby W.R. An Introduction to Cybernetics. L.: Chapman & Hall, 1956.
