К развитию теории синтеза неэвольвентных зубчатых зацеплений на базе цилиндрического исходного звена в обобщающих координатах

Бесплатный доступ
Описан общий подход к синтезу неэвольвентных зубчатых зацеплений в обобщающих координатах точек поверхностей зубцов исходного звена. Сформулированы общие принципы управления качественными показателями зацеплений в обобщенной области существования с помощью локальных областей существования.
Неэвольвентные зацепления, обобщающие координаты, обобщенная область существования, локальная область существования
Короткий адрес: https://sciup.org/147151603
IDR: 147151603 | УДК: 621.833
To development of the theory of synthesis of uninvolute gearings on the basis of cylindrical basic link in generalizing coordinates
The general approach to synthesis uninvolute gearings in generalizing coordinates of points surfaces teeth of basic link is described. The general principles of management qualitative factors gearings in the generalized area of existence with the aid local areas of existence are stated.
Текст научной статьи К развитию теории синтеза неэвольвентных зубчатых зацеплений на базе цилиндрического исходного звена в обобщающих координатах
Синтез зубчатого зацепления любого вида выполняется при заданных значениях независимых параметров схемы передачи, задающих закон движения звеньев и их относительное расположение, форму и размеры начальной поверхности исходного звена.
В ранее опубликованной монографии автора настоящей статьи изложена теория синтеза неэвольвентных зубчатых зацеплений в обобщающих параметрах на базе цилиндрического эволь-вентного исходного звена, которое отличается от производящего цилиндрического эвольвентного зубчатого колеса на величину радиального зазора в проектируемых передачах [1].
В связи с повышением уровня технологий формообразования зубчатых колес настало время расширить понятие исходного звена, а следовательно, область применения метода синтеза зацеплений в обобщающих параметрах, и сформулировать общие принципы управления качественными показателями зацеплений (геометро-кинематическими и нагрузочными показателями - ГКП и НП) на стадии синтеза в обобщающих координатах. В число ГКП включаются: коэффициент перекрытия, приведенный радиус кривизны контактирующих поверхностей зубцов (зубьев без переходных кривых) в центре зацепления, скорости их качения и скольжения в проекциях на оси мгновенной площадки контакта и коэффициенты скольжения в крайних точках зацепления. В число НП включаются контактные, изгибные и эквивалентные напряжения.
Под исходным звеном предлагается понимать зубчатое колесо, получаемое в процессе формообразования зубьев производящей рейкой с заданным, в общем случае криволинейным, профилем зубцов в торцовом сечении, перемещаемой по определенной, в общем случае криволинейной, траектории.
В частном случае, если производящая рейка имеет прямолинейный торцовый профиль зубцов и перемещается по прямолинейной траектории, то получаем эвольвентный торцовый профиль зубцов воспроизводимого колеса - исходного звена. При этом поверхность вершин зубцов колеса может быть цилиндрической или конической. Во втором случае получаем, так называемое, эвольвентно-коническое исходное звено.
В общем случае кинематического огибания воспроизводится колесо с переменным коэффициентом смещения вдоль его оси. Задача заключается в обоснованном определении вида функции изменения коэффициента смещения в зависимости от аппликаты торцового сечения исходного звена для каждого вида проектируемой передачи с целью получения наиболее благоприятного комплекса качественных показателей контакта. При синтезе зацепления в обобщающих координатах сначала нужно установить влияние вида функций граничных линий и обобщающих координат определяющей точки его локальной области существования, выбираемых в обобщенной (предельной) области существования, на геометро-кинематические показатели контакта.
Неэвольвентный профиль зубца исходного звена теоретически может быть образован перекатыванием по некоторой (основной) окружности отрезка некоторой кривой линии f(x, у) = 0 (рис. 1), в частности, дуги окружности, ветви параболы, гиперболы и др., а практически методом обкатки заготовки производящей рейкой с соответствующим профилем зубцов. Перекатываемая кривая может состоять и из нескольких участков различной формы, а в самом общем случае может быть задана набором точек с определенным шагом дискретности. Соответствующий профиль зубцов практически может быть реализован на станках с числовым программным управлением.
При заданных значениях независимых параметров схемы передачи геометрия неэвольвент-ного зацепления в общем случае полностью определяется значениями обобщающих координат точек поверхности зубца исходного звена в его торцовых сечениях: торцового угла зацепления a tw , определяющего угловое положение нормали n и касательной т к торцовому профилю зубца в системе координат xOy ; профильных углов а х , a у , определяющих расстояния rn и r т от оси исходного звена до нормали и касательной к торцовому профилю соответственно (см. рис. 1), и относительной толщины зубца на окружности вершин m a в долях диаметра наибольшей основной окружности d b max - масштабного фактора проектируемой передачи.
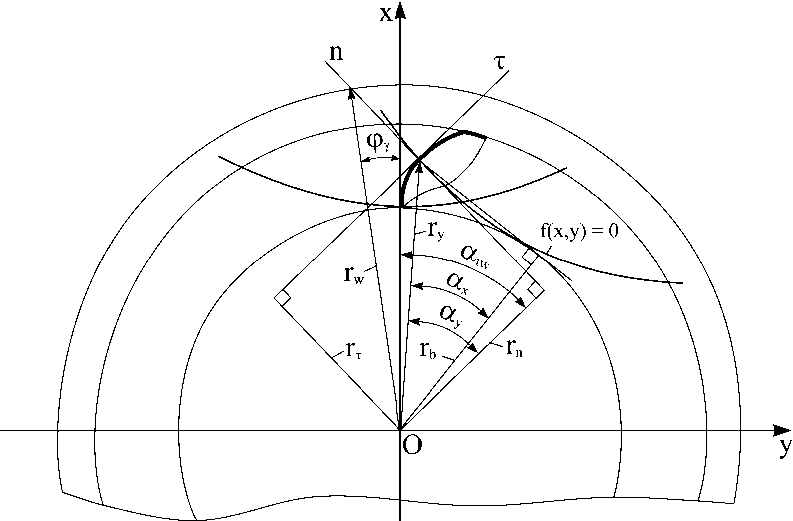
Рис. 1. К образованию торцового профиля зубца исходного звена
Радиус начальной окружности r w предлагается выбирать больше или равным радиусу окружности вершин зубцов, то есть область их профилирования в каждом торцовом сечении ограничивать начальной окружностью, а в пространстве - начальной поверхностью.
Для обеспечения преемственности разрабатываемой и разработанных ранее теорий предлагается модуль радиуса-вектора текущей точки профиля гу определять как функцию радиуса текущей основной окружности Г ь .
Вид функции f( a x , a y ) = 0 в торцовом сечении исходного звена зависит от вида функции перекатываемой по основной окружности линии. Если эту функцию выбирать по какому-либо критерию качества зацепления, то наоборот, она определит функцию перекатываемой по основной окружности линии. Если заготовка цилиндрическая, то используем основной цилиндр, если коническая - основной конус. Во втором случае радиусы основных окружностей торцовых сечений будут зависеть от угла конуса.
Функцию образующей поверхности вершин зубцов исходного звена и связанную с ней функцию изменения коэффициента смещения в зависимости от аппликаты торцового сечения предлагается выбирать в результате анализа инерционных зон касания производящей и воспроизводимой поверхностей на стадии компьютерного проектирования различных видов передач. Основной критерий - качество локализованного контакта, при котором исключается кромочное
Цуканов О.Н.
касание зубьев вследствие погрешностей изготовления и монтажа передачи, снижается вероятность их интерференции вследствие деформаций элементов механизма.
Если в любом торцовом сечении исходного звена а х = а y , то получаем неэвольвентное зацепление с эвольвентным, в частности с цилиндрическим, исходным звеном, а разработанная автором настоящей статьи теория синтеза таких зацеплений в обобщающих параметрах может рассматриваться, как частный случай разрабатываемой общей теории неэвольвентных зацеплений. Иными словами, синтез неэвольвентных зацеплений на базе эвольвентного исходного звена выполняется в системе двух обобщающих координат ( а tw , а у ), а синтез неэвольвентных зацеплений на базе неэвольвентного исходного звена - в системе трех обобщающих координат ( а w , а y , и а x ).
В общем случае поверхность зацепления существует в некоторой предельной области, называемой обобщенной областью существования зацепления (ООСЗ), которая определяется совокупностью значений независимых параметров схемы передачи, числом зубцов исходного звена и их относительной толщиной на окружности вершин в системе обобщающих координат а tw , а x , а у .
При заданных в обобщенной области существования зацепления значениях обобщающих координат а tw max , а x , а y одной из крайних точек поверхности зацепления на вершине зубца исходного звена определяется ее локальная область существования (ЛОСЗ).
Исходя из результатов исследований, описанных в [1], можно предположить, что ООСЗ и ЛОСЗ будут иметь вид, показанный на рис. 2. ООСЗ ограничивается предельными кривыми заострения ( g s , g s ') и подрезания ( g c ) зубцов огибающего звена. ЛОСЗ ограничивается отрезком прямой a , соответствующей заданным значениям углов а x и а y на вершине зубца исходного звена; локальной кривой заострения зубца огибающего звена s , соответствующей этим значениям, и линией p , форма которой зависит от формы поверхности вершин зубцов этого звена.
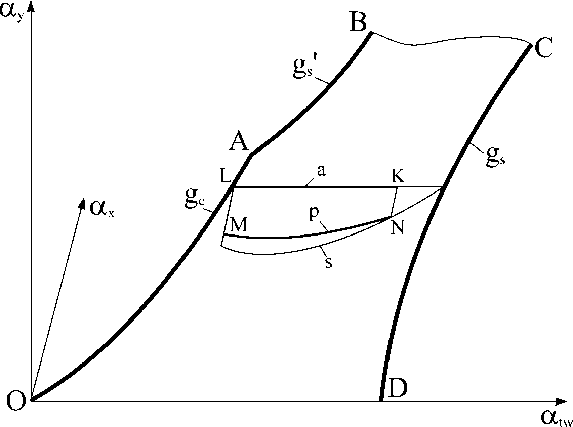
Рис. 2. К определению обобщенной и локальной областей существования (OABCD и KLMN) неэвольвентных зацеплений в обобщающих координатах α tw , α x , α у
Исходя из физических закономерностей образования неэвольвентных зацеплений в процессе кинематического огибания и анализа функций граничных линий областей существования, можно сформулировать следующие принципы управления качественными (геометро-кинематическими и нагрузочными) показателями зацеплений на стадии синтеза в обобщающих координатах:
-
1) комплексом качественных показателей неэвольвентного зацепления в пределах ООСЗ можно управлять путем изменения значений обобщающих координат определяющей точки ЛОСЗ;
-
2) комплексом качественных показателей зацепления в пределах ЛОСЗ можно управлять путем изменения формы ее граничной линии, соответствующей точкам поверхности вершин зубцов огибающего звена, и значений обобщающих координат ее крайних точек;
-
3) комплексом качественных показателей неэвольвентного зацепления в пределах ООСЗ и ЛОСЗ можно управлять путем изменения формы торцового профиля зубцов исходного звена;
-
4) комплексом качественных показателей неэвольвентного зацепления в пределах ЛОСЗ можно управлять путем изменения формы образующей поверхности вершин зубцов исходного звена – траектории движения производящей рейки.
Поверхность зубцов производящей рейки воспроизводится поступательным перемещением линии касания ее с поверхностью зубцов исходного звена (характеристики). Точки характеристики находятся поворотом точек торцового профиля зубцов на угол ϕ γ (см. рис. 1) на плоскости проекций xOy и перемещением на расстояние w = p γ ϕ γ от этой плоскости, где p γ – винтовой параметр.
Таким образом, линейные координаты x , y , w точек производящей и воспроизводимой поверхностей определяются как функции масштабных факторов проектируемых передач r w и r b , винтового параметра p γ и обобщающих координат α tw , α x , α у .
Использование исходного звена с неэвольвентным торцовым профилем зубцов и криволинейным профилем образующей поверхности вершин расширяет возможности управления комплексом качественных показателей зацеплений и создает предпосылки для создания зубчатых передач с новыми свойствами и нового уровня качества.
Список литературы К развитию теории синтеза неэвольвентных зубчатых зацеплений на базе цилиндрического исходного звена в обобщающих координатах
- Цуканов О.Н. Основы синтеза неэвольвентных зубчатых зацеплений в обобщающих параметрах: моногр./О.Н. Цуканов. -Челябинск: Издат. центр ЮУрГУ, 2011. -140 с.
