К вопросу использования когнитивной технологии "белых пятен" ТВ-диапазона в сетях VANET

Автор: Елисеев С.Н., Степанова Н.В.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 1 т.21, 2018 года.
Бесплатный доступ
В статье рассматриваются проблемы передачи сообщений о безопасности дорожного движения в сети VANET в режиме вещания по радиоканалам между двумя двигающимися автомобилями. Рассматриваемые проблемы вызваны низким расположением передающей и приемной антеннами над земной поверхностью. Волны используемого в VANET канала с частотой 5,89 ГГц, из-за слабой способности к дифракции, испытывают значительное затухание вплоть до полной блокировки линии прямой видимости. Нарушения нормальных условий приема сообщений о безопасности дорожного движения вызывают увеличение времени доставки и вероятности приема этих сообщений. Для решения проблемы обеспечения надежной доставки сообщений о безопасности дорожного движения предлагается дополнить их передачу в канале 5,89 ГГц передачей в дециметровом ТВ-диапазоне по когнитивной технологии «белых пятен». Распространение волн в этой части спектра частот имеют более выраженную способность к дифракции, меньшее ослабление сигнала в зависимости от расстояния между передатчиком и приемником, что способствует эффективной доставке сообщений о безопасности дорожного движения в сети VANET.
Сообщения безопасности дорожного движения, сети vanet, полосы "белых пятен" тв-диапазона, затухание радиосигнала, мобильные препятствия распространению радиоволн
Короткий адрес: https://sciup.org/140256031
IDR: 140256031
To the question of using the cognitive technology of "white spots" of the TV range in VANET networks
The article discusses problems transmission of the messages of road safety in the VANET network in the broadcast mode via radio channels between two moving cars. The problem caused by the low location of the transmitting and receiving antennas above the earth’s surface. The waves used in VANET channel with a frequency of 5.89 GHz, due to the weak ability of diffraction, experience significant attenuation up to the complete blocking line of sight. Obstructions of the normal conditions of reception of the messages of road safety causes an increase in delivery time and probability of reception of these messages. To solve the problem of ensuring reliable delivery of the messages of road safety is proposed to add transmission SM in the channel of 5.89 GHz transmission in the UHF TV band for cognitive technologies «white spaces». Wave propagation in this part of the spectrum have a better ability to diffraction, the smaller the attenuation depending on the distance between the transmitter and the receiver, which contributes to the effective delivery of the messages of road safety in the network of VANET.
Текст научной статьи К вопросу использования когнитивной технологии "белых пятен" ТВ-диапазона в сетях VANET
Одна из главных приоритетных целей создаваемых интеллектуальных транспортных сетей (ИТС) это обеспечение безопасности автодорожного движения (БДД), снижение аварийности на дорогах. Как сформулировано в [1; 2] к числу основных целей повышение уровня безопасности дорожного движения, выработка эффективных решений с целью предотвращения ДТП и минимизация негативных последствий от произошедших ДТП. Достижение перечисленных целей диктует необходимость формулирования и выполнения требований по своевременности и надежности доставки сообщений категории БДД по телекоммуникационной основе ИТС, которой являются самоорганизующиеся децентрализованные сети – VANET, для которых выделена полоса частот 70 МГц в диапазоне 5,9 ГГц, предназначенная для работы систем радиосвязи ближнего действия (DSRC) [3; 4]. Эта полоса разделена на 7 каналов по 10 МГц в каждом, как это иллюстрирует рис. 1. Назначение каналов в США показано на рис. 1, а, в Европе рис. 1, б. Уровень излучаемой мощности для неправительственных служб не превышает в обоих случаях 33 dBm. Сеть VANET поддерживается системой позиционирования автомобилей через спутниковые навигационные системы и цифро- вые карты местности, актуализируемые информацией содержащейся в сообщениях VANET.
Сообщения передаваемые по сети VANET разделяются по своему содержанию и назначению на две большие группы: сообщения о безопасности дорожного движения (СБ) и на информационные и развлекательные сообщения (СИ). Канал 178, называемый каналом управления (обозначается как – ССН), предназначен для передачи сообщений СБ. Каналы 172 и 1184, размещенные на краях частотной полосы предназначены для специальных целей. Оставшиеся 4 канала, называемые сервисными (обозначаемые как – SCH), предназначены для передачи СИ. В децентрализованной структуре VANET, являющейся Ad-hoc сетью с быстро меняющейся топологией, в которой автомобили, находящиеся в данный момент на определенном участке дороги – это высокомобильные сетевые узлы, используется режим вещания, точнее широковещания (ШВ), чтобы выполнить жесткие требования по допустимой величине задержки доставки СБ и обеспечению высокой надежности передачи СБ. ШВ распространение информации из СБ позволяет участникам дорожного движения (ДД) находящимся в зоне вещания наиболее быстро реагировать на появляющиеся препятствия и угрозы.
а )
б )
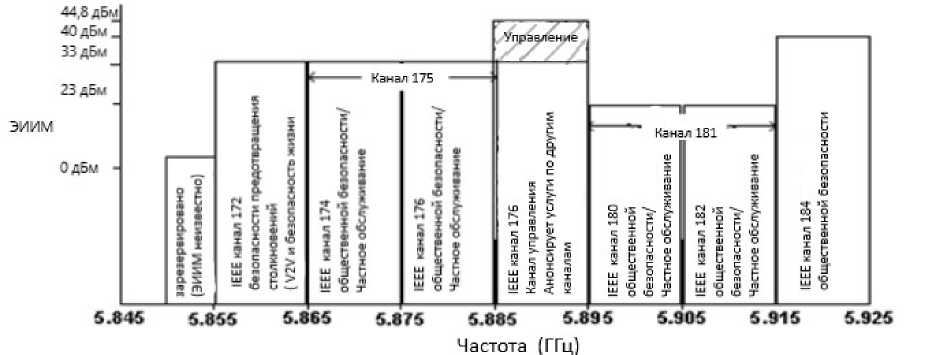
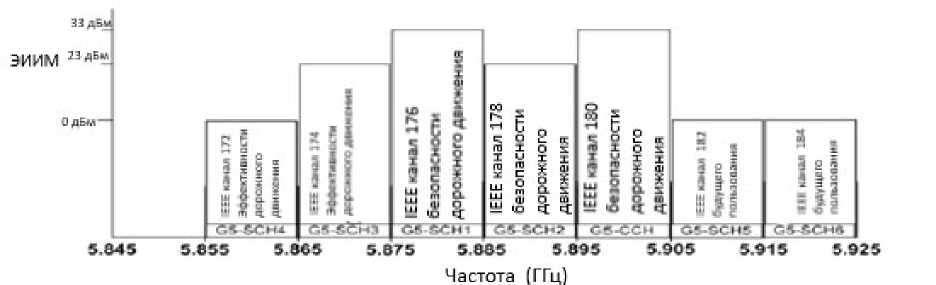
Рис. 1
В сети VANET используются два вида связи: V2V-связь между автомобилями и V2I-связь между автомобилями и коммуникационными устройствами придорожной структуры, например точками доступа во внешние сети по отношению к сети VANET или ретрансляторы. В данной статье рассматривается только режим V2V.
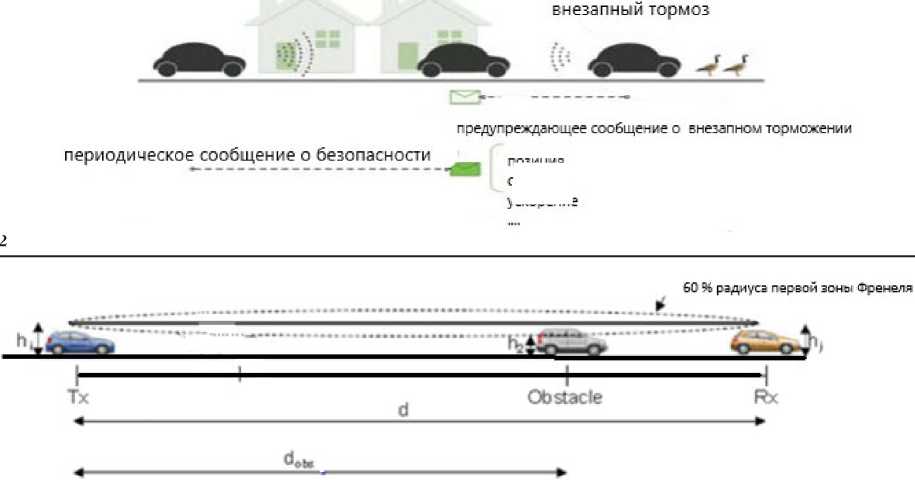
СБ разделяются на два вида сообщений: 1) периодически транслируемые каждым из автомобилей данного фрагмента сети маячковые сообщения (РВМ) содержащие данные о его географических координатах местоположения, направлении движения, скорости и ускорении движения, а также номер данного РВМ. Маячковые сообщения – это один из ключевых моментов в процессе обеспечения безопасности ДД. Конкретно автомобиль создает цифровую карту, отображающую статус окружающих его автомобилей, принимая от них РВМ, и проверяет ее для оценки рисков аварии. 2) сообщения о возникшей опасности, чрезвычайной ситуации (ESM), которы е о тносятся к категории сообщений управляемых событиями. ЕSM генерирует один из автомобилей, обнаруживших на дороге потенциально опасную ситуацию, отправляя
ШВ образом на все автомобили находящиеся в зоне вещания отправителя. Рис. 2 иллюстрирует пример передачи СБ обоих видов.
На ранних стадиях разработки сетей VANET, при анализе характеристик радиоканалов, определяемых на физическом уровне параметрами сигналов стандарта IEEE802.11p [5] и собственно характеристиками распространения радиоволн, излучаемых антеннами размещенными на малой высоте относительно поверхности, не учитывалось влияние автомобилей, как препятствующих прохождению радиосигналов от передатчика (Тх) к приемнику (Rx) по линии прямой видимости (LOS), которое значительно увеличивает ослабление силы сигнала, вплоть до его блокировки когда автомобиль не способен принять сигнал Тх даже в области радиовидимости. Результаты экспериментов [6] свидетельствуют, что даже одиночный автомобиль-препятствие может уменьшить мощность принимаемого сигнала на 20 дБ и блокировать на автомагистрали LOS до 50 % времени.
Первые меры противодействия рассмотренной выше обструкции сигналов рассматривалась ретрансляция узлами VANET передаваемых сообщений. Там где доступны узлы V2I связи
Рис. 2
позиция скорость ускорение
Рис. 3
(с увеличенной высотой подвеса антенн) для этого используются узлы придорожной структуры. В рассматриваемой V2V cвязи ретрансляторами автомобили, находящиеся поблизости. Характеристики устойчивости такого вида ретрансляции зависят от плотности потока автомобилей, подобного Пуассоновсокому потоку [7] и во многих условиях слабого (редкого) трафика он имеет ограниченные возможности.
В данной работе в качестве устраняющей обструкцию сигнала альтернативной меры, рассмотренной выше, предлагается дополнить передачу сообщений в диапазоне DSRC передачей в диапазоне дециметровых волн по технологии когнитивного радио (СR) в «белых пятнах» телевизионного диапазона (TVWS). В работе [8] и ряде других работ подробно рассматривались вопросы преодоления ограничений связи DSRC диапазона, используя для этого дополнительно к основной DSRC связи передачу сообщений в TVWS каналах, в которых обеспечивается большая зона покрытия. Распределенная передача в двух разных диапазонах частот требует создания механизмов взаимодействия процедур приема сообщений в этих диапазонах.
Сначала оценим влияние одиночного мобильного препятствия, сравнивая характеристики распространения радиоволн двух рассматриваемых диапазонов на одиночном клинообразном препятствии следуя методике, предложенной в [6]. Применение этой модели обосновывается малой длиной волны Тх в сравнении с размером препятствия. Рассматривая вклад препятствия распространению сигнала нужно вначале определить возможность существования LOS на основе данных о размерах автомобилей и их взаимного расположения согласно рис. 3
Радиолиния может считаться LOS есл и существует визуальная линия прямой видимости между Тх и Rx и не менее 60 % радиуса первой зоны Френеля образуют эллипсоид, в точках фокуса которого находятся Тх и Rx, свободный от любых препятствий (рис. 3) Радиус первой зоны Френеля определяется как:
X d np ( d d np ) гф Ч d
где X — длина волны сигнала Тх; dn p — расстояние от Тх до препятствия; d – расстояние от Tx до Rx.
Эффективная высота прямой линии соединяющей Тх и Rx над точкой местоположения препятствия dпр равна:
h = (h R - h T ) d np / d + h T - 0,6 Г ф + h a , (2) где hR и hТ – соответственно высота автомобилей передатчика и приемника; ha – высота собственно антенны, которая в [6] полагается равной 0,1 м.
По данным зарубежных ассоциаций автомобилистов и авторитетных каталогов автомобилей высота автомобиля подчиняется нормальному распределению. Определяя вероятность существования LOS на линии между Tx и Rx с одним мобильным препятствием условную вероят- ность:
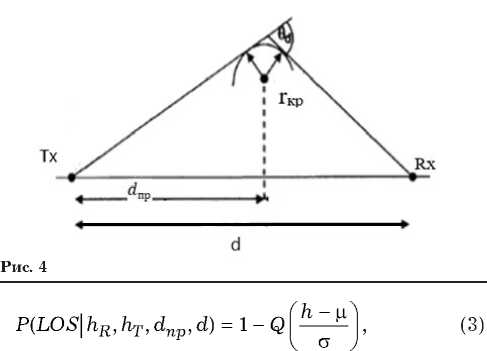
где Q | — | - это Q -функция; ц и □ соответ- V СТ 7
ственно средняя высота препятствия и стандартное отклонение его высоты (параметры нормального распределения). Строго говоря ц ( d ) является параметром, зависящем от длины радиолинии d .
Оценивая затухание сигнала на препятствии уточним, трассы прямой видимости LOS со свободной 1-ой зоной Френеля и с дифракцией волн на трассе, вызванной перекрытием этой зоны (LOS with sub-p a th diffraction ) . В е личина такого дополнительного затухания имеет хорошую аппроксимацию точного решения в форме интеграла Френеля [6]. Эта аппроксимация имеет вид для затухания В выраженного в дБ:
6,9 + 20 lgh/(( v - 0,1) 2 + 1) + V - 0,1]
В = < для V > - 0,7;
0,
H где V = д/2 —, H — это разность между высотой rф препятствия и высотой прямой линии Тх-Rx на
расстоянии dпр .
Детализируя рассмотренный выше случай
единственного препятствия в диапазоне TVWS можно выделить еще два фактора: во-первых
это препятствие со скругленной гранью, что характерно для многих видов автомобилей, ко-
торый рассматривается как цилиндр радиуса
rкр , как это показано на рис. 4: Угол дифракции
6 d = arctg
f H 1
dn„
V пр 7
+ arctg
f H 1
d - dna
V пр 7
Величина дополнительных потерь к потерям в
(4) выраженная в дБ равняется [9]:
r
В доп = 11,7 6 d п кр^- .
Л
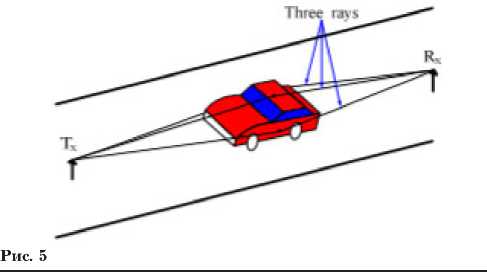
Из формулы (6) следует, что величина дополнительных потерь в диапазоне дециметровых волн (TVWS) в разы меньше, чем в диапазоне сантиметровых волн (DSRC). Во-вторых, если учитывать конечные размеры автомобилей, то следует использовать трехлучевую модификацию (4), предложенную в [10]. Из рис. 5 ясно, что кроме традиционно рассматриваемого луча, проходящего через крышу автомобиля, рассматриваются два луча дифракции с левой и правой стороны. Затухание каждого луча оценивается методом преодоления клинообразного препятствия, как и ранее по (4). Результирующие в Rx сигналы трех лучей некогерентно суммируются.
Для подтверждения преимуществ V2V радиоканалов TVWS диапазона в сравнении со «штатным» диапазоном VANET на частотах 5,9 ГГц, следует обратиться к опубликованным результатам экспериментальных исследований в реальных условиях. Публикации результатов измерений в диапазоне 5,9 ГГц более многочисленны, результатов по диапазону TVWS опубликовано гораздо меньше [6; 7; 10; 11]. Численные оценки характеристик в вышеперечисленных публикациях весьма отличаются друг от друга, поскольку многофакторные реальные условия экспериментов не поддаются контролю, а создание адекватных моделей радиоканалов VANET в настоящее время еще продолжается. Тем не менее, полезно сопоставить полученные характеристики двух диапазонов для подтверждения целесообразности применения TVWS на сети VANET.
Ввиду ограниченности объема статьи рассмотрим только оценки для условий ДД в сельской местности [11], под которые попадают многие участки федеральных дорог в РФ: движение в каждом направлении по одной полосе при сравнительно малом числе потенциальных высотных препятствий распространению сигнала в придорожном окружении. В этих условиях влияние мобильных препятствий возможно выявить
Таблица 1
|
Параметры модели затухания |
|||
|
Частота |
PL 0 |
Y |
о |
|
700 МГц |
11,61 |
3,16 |
3,55 |
|
5,9 ГГц |
54,71 |
1,79 |
5,36 |
Таблица 2
Параметры модели затухания LOS-OLOS
|
LOS/OLOS |
Частота |
PL 0 |
Y |
О |
|
LOS |
700 МГц |
29,93 |
2,04 |
2,48 |
|
5,9 ГГц |
57,46 |
1,61 |
5,49 |
|
|
OLOS |
700 МГц |
29,39 |
2,34 |
2,19 |
|
5,9 ГГц |
55,2 |
1,81 |
4,63 |
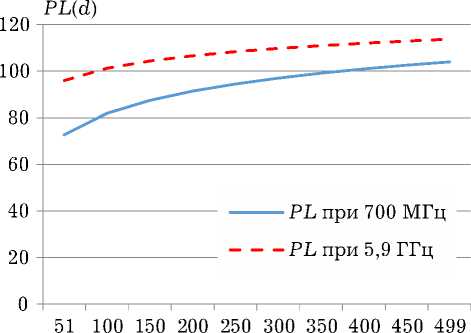
Рис. 6
наиболее явно. Практически все опубликованные результаты обработки полученных данных де- монстрируют на расстояниях порядка единиц километров линейную или линейно-ломанную зависимость потерь мощности сигнала в дБ относительно расстояния между Тх и Rx. Результаты в [11] представлены как с разделением на условия LOS и OLOS (нарушенной автомобилем препятствием) так и без разделения. Разделение оценивалось по наличию визуальной видимости, фиксируемое на видео.
Величина ослабления (затухания) сигнала ап- проксимировалась выражением:
PL ( d ) = PL0 + 10lg d + S ,
(i. • < л < л.
min max ,
где PL – величина затухания в дБ; d – расстояние между Tx и Rx; у — показатель степени отражающий условия распространения сигнала; PL0 – величина затухания определяемая из уравнения регрессии по экспериментальным данным; S – случайная нормально распределенная величина с 0-средним и о- среднеквадратичным отклонением.
Наличие в (7) случайной величины S учитывает влияние неконтролируемых факторов ДД, включая реакцию водителей. Численные значения параметров для (7) приведены в табл. 1.
Графическая иллюстрация затухания (7) построенная по данным табл. 1 на рис. 6
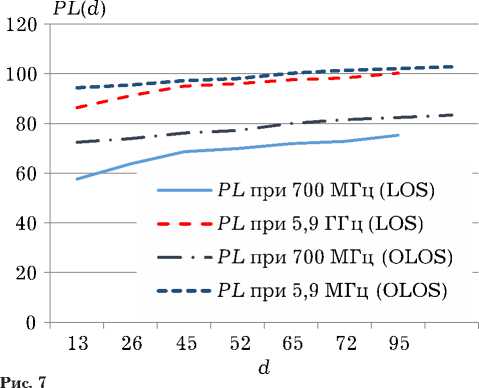
Параметры модели затухания сигнала при разделении условий LOS и OLOS в V2V связи [11] приведены в табл. 2 в LOS 13 < d < 95 м в OLOS 45 < d < 132 м.
Графическая иллюстрация затухания (7) построенная по данным табл. 2 на рис. 7.
Определим вероятности состояний LOS и OLOS, считая, что они образуют полную группу событий:
LOS OLOS
II + P II = 1
I d ) ^ d )
Для диапазона 5,9 ГГц методом моделирования в [12] вероятности (8) были определены (рис. 6). Определить вероятности (8) в диапазоне 700 МГц ( X = 0,429 м) можно по условным вероятностям (3) для условий эксперимента [11], дополненных данными [6]:
P ( L05| Kr = 1,43, Kt = 1,41, dnp = md , d ) =
( h -ц = 1,8 ) (9)
= 1 — У ----------- .
( о = 0,085 J
Тогда для h в (9) из формулы (2) получаем: d h = (Kr -Kt)—p + Kt + 0,6Гф + ha =
d
= (0,02) m + 1,51 - 0,3928V md (1 - m ).
Определим экстремум последнего выражения, приравняв производную от него по m к нулю: K i = 1,52 - 0,1964V d . В пределах реально возможных в данных условиях значений 0,02 < m < 0,98 величина h может измениться до: h 2 = 1,52 - 0,055V d .
Отсутствие взаимосвязывания условий получения экспериментальных данных из [6; 7; 11; 12] приводит к чрезвычайно малым значениям вероятностей (9) ((1-5) -10-6)в интервале наблюдавшихся расстояний. Тем не менее даже для условий OLOS вероятности правильного приема пакетов (PRP) в диапазоне TVWS превосходит PRP диапазона 5,9 ГГц для условий LOS. Значения PRP вычислялись по методике [12]. Результаты, агрегированные в данной статье, демонстрируют высокую эффективность дополнения «штатного» диапазона 5,9 ГГц передачей сигналов в диапазоне TVWS. Для практической реализации такой возможности в сети VANET требуется модернизировать протоколы VANET не только на физическом уровне, но и на МАС уровне. Дополнения должны согласно [8] включать «рандеву» протокол согласованного выбора на передаче и приеме TV-канала из некоторого множества каналов свободных от «первичных» пользователей в данной зоне (участке автодороги). В последующих работах планируется раз- работать для когнитивной технологии TVWS стандарта IEEE 802.11af [13] преамбулу кадра, обеспечивающую наряду с повышенной помехоустойчивостью малое время задержки и уменьшающую частоту столкновений сообщений в режиме широковещания.
Список литературы К вопросу использования когнитивной технологии "белых пятен" ТВ-диапазона в сетях VANET
- Евстигнеев И.А. Интеллектуальные транспортные системы на автомобильных дорогах федеральнoго значения России. М.: Перо, 2015. 164 с.
- Williams B. Intelligent Transport Systems Standards. Boston: Artech House, 2008. 827 p.
- Жанказиев С.В. Интеллектуальные транспортные системы. М.: МАДИ, 2016. 216 с.
- Dinesh M., Deshmukh M. Challenges in VANET // Int Journ. ETMAS. 2014. Vol. 2. № 7. P. 77-88.
- Abdelgader A., Lenan W. The physical layer of the IEEE802.11p wave communication standard: the specification and challenges // Proceedings of WCECS. 2014. Vol. 2. P. 1-8.
- Impact of vehicles as obstacles in VANET / M. Вoban [et al.] // IEEE J. of Selected Areas in Comm. 2011. Vol. 29. № 1. P. 15-27.
- A measurement based shadow fading model for V2V network simulations / T. Abbas [et al.] // arXiv:1203.3370v3.
- Interplay between TVWS and DSRC: optimal strategy for safety message dissemination in VANET / J-H. Lim [et al.] // IEEE Journal on Selected Areas in Communications. 2014. Vol. 32. № 11. P. 2117-2133.
- Molish A. Wireless Communications. N.-Y.: John Wiley, 2011. 817 p.
- Wang P-J., Li Ch-M. Influence of the shadowing on the information transmission distance in IVC // 20 Int. Symp. PIMRC. 2009. P. 1-5.
- Path loss characterization for vehicular communications at 700 MHz and 5.9 GHz under LOS and NLOS conditions / H. Fernandez [et al.] // IEEE Antennas and Wireless Propagation Letters. 2014. Vol. 13. P. 931-934.
- Abbas T., Tufvesson F. Line-of-sight obstruction analysis for vehicle-to-vehicle network simulations in a two-lane highway scenario // International Journal of Antennas and Propagation. 2013. Vol. 2013. P. 459323-1-9.
- IEEE802.11af: a Standard for TVWS spectrum sharing / A. Flores [et al.] // IEEE Communications Magazine. 2013. Vol. 51 (10). P. 92-100.
