К вопросу определения величины буксования при развороте гусеничной машины вокруг центра тяжести

Автор: Закиров Рамиль Агзамович, Кондаков Сергей Владимирович, Крапивин Артем Александрович, Подживотова Ирина Александровна, Тимофеев Дмитрий Александрович
Рубрика: Расчет и конструирование
Статья в выпуске: 4 т.20, 2020 года.
Бесплатный доступ
Статья посвящена исследованию поворота гусеничной машины относительно вертикальной оси, проходящей через центр тяжести. Такое движение гусеничных машин стало возможным с внедрением в их трансмиссии дифференциальных механизмов поворота или c применением бортовых схем бесступенчатых трансмиссий. Возможность разворота на месте существенно повысило маневренность как быстроходных гусеничных машин, так и тихоходных промышленных тракторов. Вопросы теории движения гусеничных машин в части разворота на месте (вокруг центра тяжести) изложены в технической литературе недостаточно глубоко, что связано с конструктивными особенностями традиционных механизмов поворота, обеспечивающих минимальный радиус поворота, равный поперечной базе машины, то есть поворот вокруг остановленной гусеницы. Буксование гусеничного движителя относительно опоры (грунта) вносит существенные коррективы в кинематику поворота и особенно поворота вокруг центра тяжести. Результаты полевых испытаний гусеничных машин с дифференциальным механизмом поворота значительно отличаются от теоретических параметров кинематики разворота на месте, однако никому до сих пор не удавалось количественно оценить это различие и теоретически его обосновать. Авторы установили новые аналитические зависимости, наглядно иллюстрирующие многократный рост буксования гусениц при развороте на месте по сравнению с прямолинейным движением. Коэффициент буксования увеличивается до 10 раз, становится невозможным игнорировать его при оценке кинематических расчетов криволинейного движения гусеничных машин. Результаты исследования могут быть полезны научным работникам и конструкторам, занимающимся проектированием гусеничных машин с прогрессивными трансмиссиями и механизмами поворота.
Буксование, разворот на месте, дифференциальный механизм поворота, бортовая схема трансмиссии, коэффициент сопротивления прямолинейному движению, коэффициент сцепления, коэффициент сопротивления повороту, сила тяги
Короткий адрес: https://sciup.org/147233488
IDR: 147233488 | УДК: 629.114.2(07) | DOI: 10.14529/engin200402
On the issue of determining the amount of skidding when turning a tracked vehicle around the center of gravity
The article is devoted to the study of the rotation of a tracked vehicle relative to the vertical axis passing through the center of gravity. This movement of tracked vehicles became possible with the introduction of differential turning mechanisms in their transmissions or the use of on-Board schemes of continuously variable transmissions. The ability to turn on the spot significantly increased the maneuverability of both high-speed tracked vehicles and low - speed industrial tractors. The theory of motion of tracked vehicles in terms of rotation (around the center of gravity) described in the technical literature is not deep enough, because of design features of traditional mechanisms of rotation, providing minimum turn radius equal to the transverse base of the machine, i.e. the rotation around the stopped track. Skidding of the crawler relative to the support (ground) makes significant adjustments to the kinematics of the turn, and especially the turn around the center of gravity. The results of field tests of tracked vehicles with a differential turn mechanism differ significantly from the theoretical parameters of the turn kinematics in place, but no one has yet been able to quantify this difference and theoretically justify it. The authors established new analytical dependencies that clearly illustrate the multiple growth of track skidding when turning in place compared to straight-line movement. The slip coefficient increases up to 10 times, and it becomes impossible to ignore it when evaluating kinematic calculations of the curved movement of tracked vehicles. The results of the study can be useful to researchers and designers involved in the design of tracked vehicles with progressive transmissions and turning mechanisms.
Текст научной статьи К вопросу определения величины буксования при развороте гусеничной машины вокруг центра тяжести
Введение. Буксование в прямолинейном движении оценивается как разность теоретической скорости движения центра масс гусеничной машины и реальной скорости центра масс. При этом, естественно, оба борта ведут себя одинаково, буксование обеих гусениц совпадает. При развороте на месте центр масс не имеет линейной скорости, он только вращается вокруг одной точки, он и есть эта точка. Все остальные точки на корпусе и в теле гусеничной машины имеют линейную скорость, равную произведению угловой скорости корпуса относительно ЦТ на расстояние этой точки до ЦТ. Гусеницы вращаются в разные стороны с равной скоростью. Силы тяги на гусеницах направлены противоположно друг другу. Буксование каждой гусеницы – это разность между теоретической линейной скоростью точки корпуса, лежащей над геометрическим центром гусеничного обвода (серединой гусеницы по длине опорной поверхности, и серединой по ширине гусеницы).
Основная часть. При повороте гусеничной машины трак, лежащий на грунте, перемещается относительно земли (опоры) не только в продольном, но также и в поперечном направлении. Преодолевает сопротивление деформации грунта в продольном, поперечном направлениях и от вращения (подворота относительно центра трака). Это соответствует представлению Н.Е. Жуковского и его последователей в области теории движения гусеничных машин о силах и моменте трения плоского тела о грунт [1, 2].
Важно, что активной силой, преодолевающей этот конгломерат противостоящих сопротивлений, является все та же сила тяги на гусенице. Сила тяги, в свою очередь, обеспечивается только продольной (вдоль средней линии гусениц) составляющей деформации грунта – то, что принято называть буксованием. Назвать буксованием поперечную составляющую деформации грунта, или деформацию от вращения трака на грунте, нельзя – скорее это юз.
Так или иначе, в процессе поворота, а особенно ярко это видно при развороте на месте, только продольное буксование обеспечивает преодоление всех сил и моментов сопротивления повороту. Надо отметить, что далеко не все механизмы поворота позволяют разворачиваться на месте. Только появление бесступенчатых бортовых трансмиссий и дифференциальных механизмов поворота позволили получить это важное потребительское свойство в арсенал преимуществ гу-
сеничных промышленных тракторов.
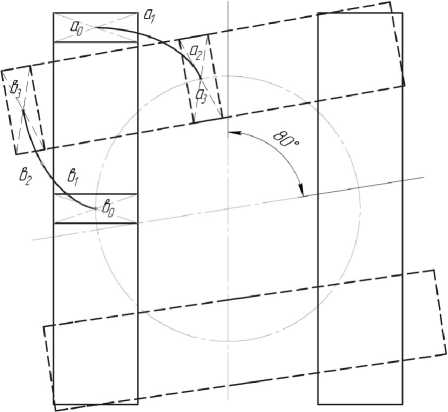
На рис. 1 приведена схема расположения траков, лежащих на грунте при развороте ГМ вокруг ЦТ, относительно траектории движения середины гусеничной тележки. Схема призвана показать величину преодолеваемых каждым траком расстояний и подворотов. Например, для трактора с дифференциальным механизмом поворота, изготовленного ОАО «Ходовые системы» совместно с ЮУрГУ в рамках комплексного проекта по созданию высокотехнологичного производства «Разработка бесступенчатого дифференциального механизма поворота со следящей системой управления для внедорожных дорожно-строительных машин нового поколения», радиус траектории R = B/2 = 0,94 м, а продольная база L = 2,86 м. Каждый трак сначала боком с подво-ротом перемещается примерно на 1 м (дуга a 0 - a 1 - a 2 - a 3 ), прежде чем попасть на траекторию центра гусеничной тележки, а потом совершает такой же путь в обратную сторону (дуга b 0 - b 1 - b 2 - b 3 ). Всё это графически показывает, насколько большие сопротивления нужно преодолевать дополни-
Рис. 1. Схема расположения траков, тельным буксованием траков по касательной к лежащих на грунте при развороте ГМ вокруг ЦТ траектории центра гусеничной тележки.
С другой стороны, из теории движения гусеничных машин [3, 4] известно, что сила тяги зависит от радиуса поворота. Причем максимум сил достигается при радиусе, равном нулю, то есть при вращении вокруг центра тяжести. В свою очередь допустимый радиус криволинейного движения связан со скоростью балансом мощности. На рис. 2 приведены графики относительных сил тяг по бортам в зависимости от линейной скорости движения центра тяжести быстроходной гусеничной машины.
Из теории движения гусеничных машин также известно, что сила тяги пропорциональна буксованию по графику на рис. 3 [5, 6], причем прямо пропорциональна, в пределах упругой деформации грунта.
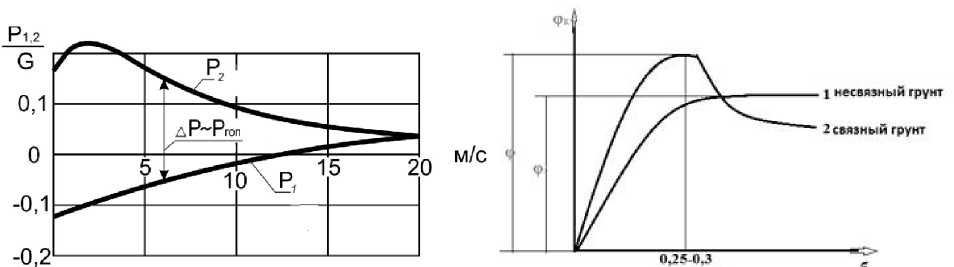
Рис. 2 Силы тяги по бортам в зависимости Рис. 3. Зависимость удельной (отнесенной к весу от скорости движения в повороте машины) силы тяги от буксования
То есть в повороте, и особенно на месте, буксование траков должно быть значительно больше, чем при прямолинейном движении машины.
Величина буксования гусениц при развороте машины на месте определена с использованием формул из учебников по теории движения гусеничных машин [2–9]:
-
1. При равномерном прямолинейном движении сила сопротивления равна силе тяги по формуле
-
2. При неравномерном прямолинейном движенииР ТЯГИ > Р соПР , а точнее
Р ТЯГИ = ^ СОПР или —f СЦ = —f СОПР , (1)
где РТЯГИ – сила тяги; P СОПР – сила сопротивления; G – вес гусеничной машины; f СЦ – коэффициент сцепления; f СОПР – коэффициент сопротивления.
Ст "•
-
—f^ = Gf сопр + -V , (2)
-
3. При равномерном повороте вокруг ЦТ сила тяги на каждой из гусениц одинакова, но направлена в противоположные стороны:
g
•• где g – ускорение силы тяжести; V – ускорение машины. То есть коэффициент сцепления боль-
•• ше коэффициента сопротивления на величину, пропорциональную ускорению трактора V .
HGL^ff
GJС^Ц Gf СОПР + 4 B ’ где µ – коэффициент сопротивления повороту; L – продольная база машины; B – поперечная база машины. Как и в предыдущем случае, сцепление должно быть больше сопротивления. Хотя движение установившееся, но постоянный поворот вносит сюда квазидинамику, связанную с постоянной сменой направления движения. Постоянно действуют центробежные силы от тяг гусениц и центростремительные силы от грунта.
Сократим все слагаемые на — и примем соотношение -^ = 2, что справедливо для большин- ства ГМ. Получим:
-
fc U = f сопр + Ц . (4)
Преобразуем (4) и введем коэффициенты буксования в повороте δ ПОВ и при прямолинейном движении δ ПР
^ ПОВ _ f СЦ = 1 + Ц δ ПР f СОПР f СОПР
.
В результате получаем, что буксование при повороте больше буксования в прямолинейном
Ц
движении в 1 +
раз.
V J сопр у
Анализ литературных источников [10–19] (табл. 1, 2) свидетельствует о том, что это соотношение может иметь величину до 10 раз для разных грунтов.
Таблица 1
Коэффициенты сопротивления прямолинейному движению
|
Грунт |
f |
|
Асфальт |
0–0,2 |
|
Сухая грунтовая дорога |
0,03–0,04 |
|
Грязная грунтовая дорога (влажность 20 %) |
0,09–0,12 |
|
Луг |
0,05–0,07 |
|
Песок |
0,12–0,17 |
|
Снег |
0,07–0,22 |
Таблица 2
Коэффициенты сопротивления повороту
|
Грунт |
Р тах |
|
Сухой дернистый суглинок |
0,8–1,0 |
|
Сухая грунтовая дорога на суглинке |
0,7–0,9 |
|
Пахота на суглинке |
0,6–0,8 |
|
Влажный суглинистый грунт |
0,3–0,4 |
|
Снег |
0,25–0,7 |
Таким образом, нет ничего удивительного в том, что кинематические показатели поворота гусеничной машины вокруг вертикальной оси, проходящей через центр тяжести, посчитанные по кинематике трансмиссии и механизма поворота, при полевых испытаниях гусеничной машины существенно искажаются буксованием – в гораздо больших размерах, нежели при прямолинейном движении. Естественно, что 2 % можно пренебречь, а 20 % – уже нельзя!
Выводы:
-
1. Развита теория движения гусеничных машин в повороте в части определения коэффициента буксования при повороте.
-
2. Определена аналитическая зависимость между буксованием гусениц в прямолинейном движении и в повороте. Показано, что буксование при развороте трактора вокруг центра тяжести может быть в 10 раз больше аналогичного показателя прямолинейного движения.
-
3. Результаты справедливы для любых радиусов поворота и зависят от свойств грунта, в частности, от величины коэффициента сопротивления повороту по А.О. Никитину.
Работа выполнялась при финансовой поддержке Министерства науки и высшего образования Российской Федерации в рамках комплексного проекта по созданию высокотехнологичного производства «Разработка бесступенчатого дифференциального механизма поворота со следящей системой управления для внедорожных и дорожно-строительных машин нового поколения» по соглашению № 074-11-2018-006 от 31.05.2018 г. между Министерством науки и высшего образования Российской Федерации и обществом с ограниченной ответственностью «Производственная компания «Ходовые системы» в кооперации с головным исполнителем НИОКТР – Федеральным государственным автономным образовательным учреждением высшего образования «Южно-Уральский государственный университет (национальный исследовательский университет)».
Список литературы К вопросу определения величины буксования при развороте гусеничной машины вокруг центра тяжести
- Жуковский, Н.Е. Условие равновесия твердого тела, опирающегося на неподвижную плоскость некоторой площадкой и могущего перемещаться вдоль этой плоскости с трением / Н.Е. Жуковский // Труды Отделения физических наук Общества любителей естествознания. – 1897. – Т. IX, вып. 1.
- Опейко, Ф.А. Колесный и гусеничный ход / Ф.А. Опейко. – Минск: Изд-во Академии сельскохозяйственных наук Белорусской ССР, 1960. – 228 с.
- Чобиток, В.А. Теория движения танков и БМП: учебник / В.А. Чобиток. – М.: Военное изд-во, 1984. – 264 с.
- Никитин, А.О. Теория танка / А.О. Никитин, Л.В. Сергеев. – Изд-во Военная академия бронетанковых войск, 1962. – 584 с.
- Буров, С.С. Конструкция и расчет танков / С.С. Буров. – Изд-во Академии БТВ, 1973. – 602 с.
- Забавников, Н.А. Основы теории транспортных гусеничных машин / Н.А. Забавников – М.: Машиностроение, 1968. – 396 с.
- Позин, Б.М. Вопросы методологии в теории тяговой характеристики трактора: монография / Б.М. Позин. – Челябинск: Изд-во ЧГАУ, 2006. – 122 с.
- Благонравов, А.А. Динамика управляемого движения гусеничной машины: учебное пособие / А.А. Благонравов, В.Б. Держанский. – Курган: Изд-во Курганского машиностроительного института, 1995. – 162 с.
- Кондаков, С.В. Алгоритм работы следящей системы управления для стабилизации прямолинейного движения промышленного трактора с дифференциальным механизмом поворота / С.В. Кондаков // Вестник Брянского гос. техн. ун-та. – 2019. – Т. 85, № 12. – C. 68–75.
- Modelling and Dynamic Tracking Control of Industrial Vehicles with Tractor-trailer Structure / Hongchao Zhao, Zhe Liu, Zhiqiang Li et al. // IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). – Macau, China, 2019. – P. 2905–2910.
- Grečenko, A. Thrust and slip of a track determined by the compression–sliding approach / A. Grečenko // Journal of Terramechanics. – 2007. – Vol. 44, iss. 6. – P. 451–459.
- Troyanovskaya, I.P. Forces of Friction at the Wheel-to-Ground Contact in a Turning Vehicle / I.P. Troyanovskaya, B.M. Pozin // Procedia Engineering. – 2015. – Vol. 129. – P. 156–160.
- Dolan, J.F. How well do surface slip measurements track slip at depth in large strike-slip earthquakes? The importance of fault structural maturity in controlling on-fault slip versus off-fault surface deformation / J.F. Dolan, B.D. Haravitc // Earth and Planetary Science Letters. – 2014. – Vol. 388. – P. 38–47.
- Application of a 3D tractor-driving simulator for slip estimation-based path-tracking control of auto-guided tillage operation / Xiongzhe Han, Hak-Jin Kim, Chan Woo Jeon et al. // Biosystems Engineering. – 2019. – Vol. 178. – P. 70–85
- Adaptive torque tracking control during slip engagement of a dry clutch in vehicle powertrain / Jinrak Park, Seibum Choi, Jiwon Oh, Jeongsoo Eo // Mechanism and Machine Theory. – 2019. – Vol. 134. – P. 249–266.
- Wang, W. Experimental study of a tracked mobile robot’s mobility performance /W. Wang, Zh. Yan, Zh. Du // Journal of Terramechanics. – 2018. – Vol. 77. – P. 75–84. – https://doi.org/10.1016/ j.jterra.2018.03.004.
- Wong, J.Y. A general theory for skid steering of tracked vehicles on firm terrain / J.Y. Wong, C.F. Chiang // Proc. Inst. Mech. Eng., Part D. J. Automobile Eng. – 2001. – Vol. 215. – P. 343–355.
- Song, X. Slip parameter estimation for tele-operated terrain vehicles in slippery terrain / X. Song, L.D. Seneviratne, K. Althoefer // Proc. Inst. Mech. Eng., Part I: J. Syst. Control Eng. – 2011. – Vol. 225. – P. 814–830.
- Kinematics-aware model predictive control for autonomous high-speed tracked vehicles under the off-road conditions / Zhao Ziye, Liu Haiou, Chen Huiyan et al. // Mechanical Systems and Signal Processing. – 2019. – Vol. 123. – P. 333–350.
