К задаче определения взаимной ориентации блока акселерометров и тела системы видеоанализа

Автор: Кручинин П.А., Латонов В.В., Матвеев Д.С.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 3 (89) т.24, 2020 года.
Бесплатный доступ
Обсуждается два алгоритма определения матрицы относительной ориентации инерциального блока и тела системы видеоанализа. Решение этой задачи необходимо для дальнейшей совместной обработки данных этих сенсоров в биомеханических исследованиях. В частности, оно требуется для определения ускорения движущегося объекта в условиях гравитации по показаниям трехкомпонентного акселерометра и системы видеоанализа. В этом случае для вычитания из показаний акселерометра составляющих, порожденных силой тяжести, можно использовать данные о местной вертикали хорошо откалиброванной системы видеоанализа. Оба алгоритма используют измерения, полученные для статических положений, отличающихся ориентацией приборных осей относительно гравитационной вертикали, и одновременно позволяют оценивать систематические ошибки акселерометров. Первый алгоритм предполагает ортогональность приборных осей инерциального блока и не учитывает погрешности в информации о масштабных коэффициентах акселерометров. Алгоритм использует соотношения, линеаризованные в окрестности априорных оценок искомых величин. Второй алгоритм не использует априорную информацию об осях приборного трехгранника. В этом случае проводится повторная калибровка блока акселерометров, и помимо нулей и масштабных коэффициентов определяются углы неортогональности инструментальных осей блока. Непосредственным результатом его работы является матрица, которая позволяет определять проекции кажущегося ускорения на координатные оси, связанные с телом системы видеоанализа. Алгоритмы опробованы на экспериментальных данных. Критерием сравнения являлась разность оценок, полученных по различным выборкам измерений. Обработка результатов пробного эксперимента показала, что для неточных микроэлектромеханических систем второй алгоритм дает более устойчивые результаты.
Видеоанализ, блок акселерометров, определение ускорений, комплексирование измерений, взаимная ориентация, масштабные коэффициенты, приборный трехгранник, неортогональность приборных осей
Короткий адрес: https://sciup.org/146281853
IDR: 146281853 | УДК: 531.7: | DOI: 10.15593/RZhBiomeh/2020.3.05
The problem of mutual orientation determination of the accelerometer unit relative to target of the motion capture system
Two algorithms for determination of the rotation matrix of the inertial unit relative to the motion capture 6DOF target are discussed. Solution of this problem is necessary for further co-operative data processing of these sensors in biomechanical researches. In particular, it is required to estimate the acceleration of a moving object in the field of gravity from the data of a 3D accelerometer and a motion capture system. In this case, the local vertical of the well calibrated motion capture system can be used to separate the gravity induced components from the accelerometer data. Both algorithms use measurements obtained for static positions, which differ in orientation of instrumental axes relative to gravitational vertical and at the same time allow us to estimate systematic errors of accelerometers. The first algorithm assumes orthogonality of instrumental axes of inertial unit and does not take into account errors in information on scale coefficients of accelerometers. The algorithm uses equations wich are linearized in the neighborhood of a priori estimates of the unknown values. The second algorithm does not use a priori information about axes of instrumental frame. In this case, the accelerometer unit is recalibrated, and in addition to the zeros and scale factors, the non-orthogonal angles of the instrumental axes of the unit are determined. The immediate result of its work is a matrix, which allows us to determine projections of apparent acceleration on body axes of the motion capture system. Algorithms are tested on experimental data. The comparison criteria is the repeatability of estimated results obtained from different measurement samples. Processing the results of the trial experiment showed that for inaccurate microelectromechanical systems, the second algorithm produced more stable results.
Текст научной статьи К задаче определения взаимной ориентации блока акселерометров и тела системы видеоанализа
Современные экспериментальные методы в биомеханике предполагают использование различных видов измерительных систем: системы видеоанализа, инерциальные блоки и др. Анализ движений с помощью каждой системы в отдельности
Латонов Василий Васильевич, м.н.с. лаборатории математического обеспечения имитационных динамических систем, Москва
Матвеев Денис Сергеевич, студент кафедры прикладной механики и управления, Москва могут затруднить значительные инструментальные погрешности и неточности в определении части параметров. В частности, недостатком системы видеоанализа является наличие сбоев при обработке изображений. Сбои возникают, например, если видеокамеры не видят один из маркеров или не могут распознать два маркера при их расположении вблизи оси объектива одной из камер. Компенсировать подобные погрешности можно посредством алгоритмов комплексирования сенсоров с различной структурой погрешностей [4].
Необходимость совместной обработки возникает также в задаче определения ускорений при движении частей тела человека. В качестве примера можно рассмотреть следующую ситуацию. Для измерения линейных ускорений во время орбитального полета используется 3-компонентный акселерометр, установленный на плате, позволяющий проводить автономную запись [3]. С его помощью проведены записи ускорений головы человека во время полета. Для сравнительного анализа записи аналогичных движений предполагается провести и в наземных условиях. Акселерометры на самом деле измеряют удельную силу, действующую на чувствительную массу прибора [7]. В условиях невесомости эта величина совпадает с ускорением, а в условиях гравитации его показаниями является кажущееся ускорение: векторная разность ускорения и удельной силы тяжести. Введем вектор удельной силы тяжести g = (0 0 g )T в проекциях на неподвижные относительно Земли координатные оси O ξης , в которых ось O ς вертикальна. Через f обозначим вектор измерений акселерометра. Учитываем, что акселерометр измеряет проекции удельной силы на приборные оси. Через a обозначим вектор ускорения, с которым движется чувствительная масса акселерометра в проекциях на те же оси. R -матрица ориентации блока акселерометров относительно осей O ξης . Тогда в соответствии с [7] ускорение a = f + Rg , и для его вычисления необходима информация о местной вертикали, которая содержится, например, в данных хорошо откалиброванной системы видеоанализа [5].
Во всех указанных случаях необходимо решить промежуточную задачу определения матрицы A относительной ориентации инерциального блока и тела системы видеоанализа. Использование известных оптимальных подходов [1, 6] для указанной задачи связано с определенными трудностями. Например, в ситуации, когда сенсоры закреплены непосредственно на одной из частей тела человека, определение взаимной ориентации систем должно проводиться в короткие сроки для ограниченного набора возможных движений и положений частей тела человека. В связи с этим необходима модификация известных алгоритмов и исследование их применимости в описанной задаче. Обсудим два алгоритма решения задачи определения матрицы относительной ориентации инерциального блока и тела системы видеоанализа.
Математическая модель
Традиционная схема исследования движений человека с использованием системы видеоанализа заключается в следующем. На конечности, голову и туловище человека крепятся тела с закрепленными на них светоотражающими маркерами (катафотами). Человек совершает движения, записываемые несколькими видеокамерами. При компьютерной обработке видеозаписи определяются координаты геометрических центров этих тел и их ориентация относительно неподвижных координат O ξης системы видеоанализа. При предварительной калибровке ось O ς этой системы устанавливается вертикально.
Рассмотрим следующую схему калибровочного эксперимента для отработки предлагаемых алгоритмов. Блок акселерометров, приборные оси которого обозначены, жестко связан с телом, на котором закреплены маркеры 1–4 системы видеоанализа, как показано на рисунке. Оси тела видеоанализа обозначены Dx y z . Вся конструкция закреплена на штативе, который дает возможность поворачивать ее вокруг трех ортогональных осей. Тело устанавливается в N различных положениях. Оно остается неподвижным на интервале времени порядка 10 с. Для каждого положения записывались данные акселерометров и системы видеоанализа. Система видеоанализа предоставляет данные о матрице поворота В осей Dx y z относительно системы координат O^nS • Преобразование ориентации осей Dxvyvzv тела видеоанализа к ориентации приборных осей трехкомпонентного акселерометра Cxuyuzu опишем последовательностью углов Эйлера–Крылова:
x v N v z v ' > x l У 1 z 1 "' > x 2 У 2 z 2 ^^ Хи Уи^ .
xvx 1 y 1 y 2 z 2 zu
Матрица поворота, по которой рассчитывается проекция удельной силы тяжести на приборные оси, имеет вид R = A –1 B.
Оба рассмотренных алгоритма используют изменение ориентации блока относительно вектора удельной силы тяжести. При этом первый алгоритм определения ориентации предполагает знание мультипликативных коэффициентов акселерометров и использует предположение об ортогональности осей инерциального блока. В этом случае матрицу A представим в виде
A = A* Am .
Здесь A*
–
диагональная
m =
Г ml
I 0
m
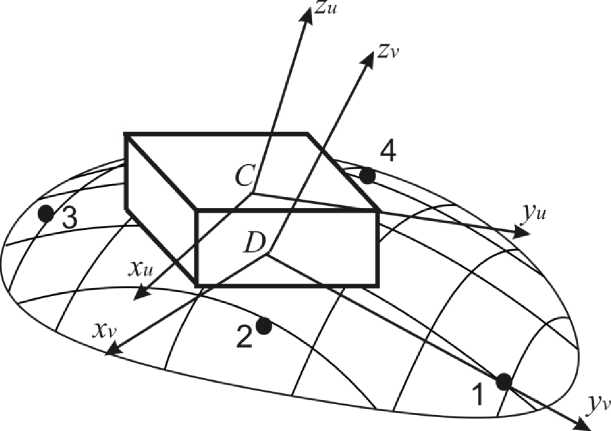
Рис. Схема размещения инерциального блока на теле системы видеоанализа
априорное приближение матрицы направляющих
матрица
0 )
масштабных
коэффициентов
0 , а A - матрица поворота, углы которого будем
m 3 )
Г 1
а
— P)
косинусов; m
–
акселерометров,
полагать малыми,
A =
— а
I в
-Y
Y)
.
Тогда
A, Am ( f + S ) = Bg . (1)
Здесь f – вектор показаний трехкомпонентного акселерометра; δ – вектор систематических ошибок акселерометров, а g – вектор удельной силы тяжести в системе координат O ^nS •
Алгоритм 1. Будем считать, что оси чувствительности акселерометров ортогональны, A , m и g известны из предварительных оценок, а f и B поступают в результате измерений. Тогда систему (1) перепишем в виде системы уравнений относительно вектора переменных х0 = (а , в , у , 5] , 52 , 53) T •
H 0 x 0 + A * ( А - E ) mS = Y 0. (2)
Здесь через E обозначена единичная матрица,
|
' m 2 f2 |
- m 3 f 3 |
0 |
m |
0 |
0 Л |
|
|
H o = A * |
- m l f. |
0 |
m 3 f 3 |
0 |
m 2 |
0 |
|
l 0 |
m 1 f 1 |
- m 2 f2 |
0 |
0 |
m 3 v |
Y = Bg - A * mf .
Пренебрегая в (2) ввиду малости квадратичным слагаемым, содержащим A, ( А - E ) mS , придем к системе линейных уравнений относительно x o
H o * o = Y , . (3)
Таким образом, по результатам измерений для N различных положений тела, отличающихся ориентацией этого тела и осей приборного трехгранника относительно вертикали, на основании соотношений (3) имеем 3 N уравнений относительно 6 неизвестных: α, β, γ и трех компонент вектора δ .
Полученная система уравнений решалась методом наименьших квадратов [2]:
X o = ( Ho T H o fH T Y . (4)
Снижения погрешностей можно достичь, использовав несколько итераций такой оценки. Для этого в начале каждой итерации значение A следует принять равным A *Д из предшествующей итерации.
Алгоритм 2 позволяет определить все компоненты матрицы K = (Am )-1 и не требует априорной информации о матрице A. Для этого систему (1) представим в виде f — S = Kg v. (5)
Здесь gv = Bg - проекция удельной силы тяжести на оси Dxvyvzv тела видеоанализа.
Эта система линейна, однако она содержит 12 неизвестных: 9 компонент матрицы K и три компоненты вектора δ . Для её решения целесообразно представить систему (4) в виде трех подсистем вида нх,=f (6)
для i = 1, 2, 3.
Здесь
H = ( g 'T
1 ) , x i =
T
K
V u i J
а K – i- я строка матрицы K .
По результатам измерений для N различных положений тела, отличающихся ориентацией осей приборного трехгранника относительно вертикали, на основании соотношений (5) имеем N уравнений относительно 4 неизвестных: трех компонент строки K и δ i . Каждая из этих систем уравнений решалась методом наименьших квадратов по формуле (4).
Матрица K получалась неортогональной. Примем обозначение P = K - 1 . В результате оценки поправок масштабные коэффициенты вычислялись как модули столбцов матрицы P :
mt=\ И-
Векторы ортогонализированного базиса вычислялись по формулам
e
Список литературы К задаче определения взаимной ориентации блока акселерометров и тела системы видеоанализа
- Акимов П.А., Деревянкин А.В., Матасов А.И. Гарантирующий подход и L1-аппроксимация в задачах оценивания параметров БИНС при стендовых испытаниях. - М.: Изд-во Моск. ун-та, 2012. - 296 с.
- Александров В.В., Болтянский В.Г., Лемак С.С., Парусников Н.А., Тихомиров В.М. Оптимальное управление движением - М.: Физматлит, 2005.
- Александров В.В., Бугров Д.И., Лемак С.С., Рязанский С.Н., Кручинина А.П., Латонов В.В., Сухочев П.Ю., Тихонова К.В., Томиловская Е.С., Чертополохов В.А. Исследование возможностей использования гравитоинерциального механорецептора в условиях микрогравитации для детектирования движений космонавта // Девятый междунар. аэрокосм. конгресс IAC'18: тез. докл. - М., 2018. - С. 129-131.
- Бобылев А.Н., Болотин Ю.В., Воронов А.В., Кручинин П.А. O двух модификациях метода наименьших квадратов в задаче восстановления утерянной информации системы видеоанализа по показаниям акселерометра // Российский журнал биомеханики. - 2012. - T. 16, № 1. - C. 89-101.
- Бобылев А.Н., Кручинин П.А., Чертополохов В.А. Совместная обработка показаний инерциального блока и системы видеоанализа // Изв. ЮФУ. Технические науки. - 2014. - № 10 (159). - С. 97-103.
- Вавилова Н.Б., Васинёва И.А., Голован А.А., Козлов А.В., Папуша И.А., Парусников Н.А. Калибровка в инерциальной навигации // Фундаментальная и прикладная математика. - 2018. - Т. 22, № 2. - С. 89-115.
- Ишлинский А.Ю. Классическая механика и силы инерции. - М.: URSS, 2018. - 320 с.
- Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация. - М.: Наука, 1976. - 672 с.
