Кинематический анализ движения руки в локтевом суставе при реабилитации методами механотерапии

Автор: Яцун С.Ф., Тарасова Е.С.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Биотехнологии и биоинженерия
Статья в выпуске: 4-4 т.13, 2011 года.
Бесплатный доступ
Представлено описание структуры системы рука пациента - реабилитационное устройство. Рассмотрены особенности строения локтевого сустава, оказывающие влияние на его кинематические характеристики. Предложена кинематическая модель локтевого сустава, которая может быть использована для определения требуемых параметров реабилитационного устройства, а также в дальнейшем для моделирования системы рука-устройство в целом.
Механотерапия, реабилитационная система, локтевой сустав, кинематическая модель
Короткий адрес: https://sciup.org/148200282
IDR: 148200282 | УДК: 531.1
The kinematic analysis of the arm movement in elbow joint at rehabilitation by mechanotherapy methods
The exposition of structure of system an arm of the patient - the rehabilitation device is pre-sented. Features of the elbow joint structure, influencing on its kinematic performances are considered. The kinematic model of elbow joint which can be used for definition the de-manded parameters of the rehabilitation device, and also further for modeling the system an arm-device as a whole is offered.
Текст научной статьи Кинематический анализ движения руки в локтевом суставе при реабилитации методами механотерапии
процесс движения становится неконтролируемым: получаемые траектории движения не будут совпадать с требуемыми, что может привести к недопустимому увеличению моментов, возникающих в суставах, и в конечном итоге нанести вред пациенту [1, 3, 7].
Для того чтобы обеспечить возможность исследовать движение руки человека и реабилитационного устройства как единой человеко-машинной системы, необходимо иметь четкое представление о том, каким образом происходят естественные движения в локтевом суставе, а также движения совместно с механотерапевтическим устройством. В соответствии со структурной схемой, изображенной на рис. 2, система может быть представлена в виде двух отдельных подсистем, каждая из которых включает в себя три взаимосвязанных части: механическую, силовую и информационную. Взаимодействие между подсистемами осуществляется через механические связи. В связи со сложностью механики движения руки в локтевом суставе, необходимо рассмотреть ее более подробно.
Особенности строения локтевого сустава. Локтевой сустав представляет собой сложное соединение трех костей: плечевой, локтевой и лучевой (рис. 3). На рис. 3 показан профиль поверхностей сопряжения плечевой кости с костями предплечья. Соединение с локтевой костью представляет собой вращательную пару с одной степенью свободы. Поверхности костей в этом суставе по форме напоминают песочные часы, что позволяет избежать взаимного осевого смещения. Локтевой отросток при разгибании входит в ямку плечевой кости, ограничивая таким образом объем движений. Соединение плеча и лучевой кости осуществляется посредством сферического шарнира. Кроме того, кости предплечья также образуют пару вращения, ось вращения которой направлена приблизительно вдоль прямой, соединяющей центр сферического шарнира и точку соединения локтевой кости с запястьем. [2, 4] Таким образом, локтевой сустав обеспечивает две степени свободы для предплечья: поворот относительно оси плечелоктевого сопряжения, то есть сгибание-разгибание руки, и ротацию вокруг продольной оси, то есть пронацию-супинацию, которая фактически является вращением лучевой кости вокруг локте- вой. На рис. 4 представлена модель сустава, в которой реализованы описанные выше соединения, а на рис. 5 – соответствующая кинематическая схема [8].
Кинематика движения локтевого сустава. Для определения кинематических соотношений, описывающих движение руки, воспользуемся расчетной схемой, представленной на рис. 6, при этом будем считать, что плечо лишено всех возможных степеней свободы кроме вращения вокруг собственной оси. Для упрощения будем считать, что отрезки ОО1 и ОО2 лежат на одной прямой, которая является осью плечелоктевого сустава, О 1 К 1 - длина локтевой кости, О 2 К 2 – длина лучевой кости.
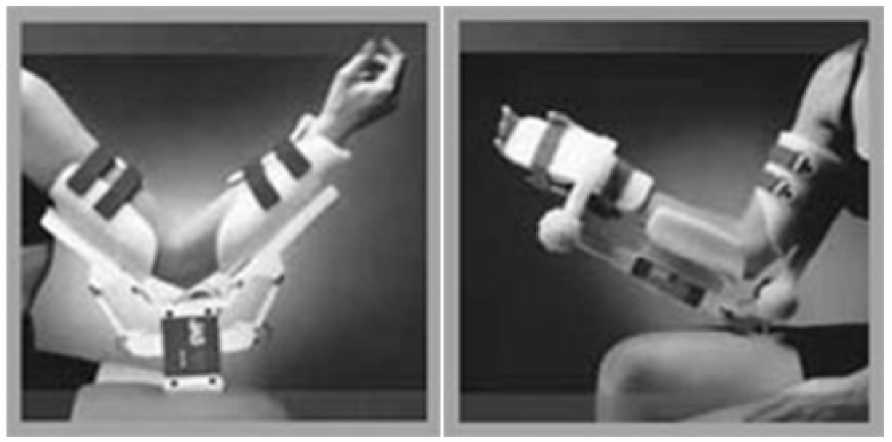
Рис. 1. Аппараты JAS для локтевого сустава

Рис. 2 . Структурная схема системы рука-устройство
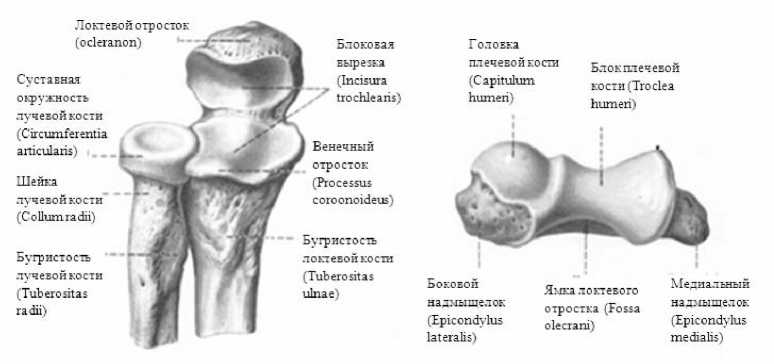
Рис. 3. Строение костей плеча и предплечья в области сустава
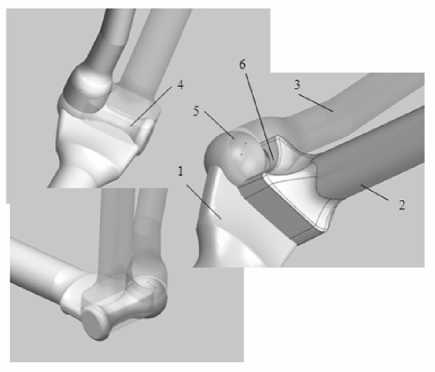
Рис. 4. Модель локтевого сустава:
1 – плечевая кость; 2 – локтевая кость; 3 – лучевая кость; 4 – пара вращения плечелоктевого сустава; 5 – сферический шарнир плечелучевого сустава; 6 – пара вращения соединения локтевой и лучевой кости
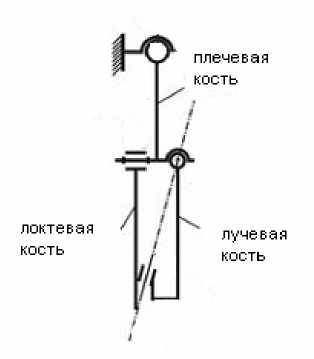
Рис. 5. Кинематическая схема локтевого сустава
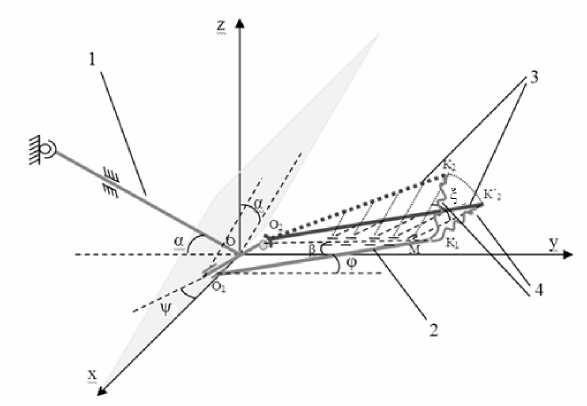
Рис. 6. Расчетная схема:
1 – плечевая кость; 2 – локтевая кость; 3 – лучевая кость (в двух положениях); 4 – линия прикрепления запястья (в двух положениях; ОО 1 – расстояние между осями плечевой и локтевой кости; ОО 2 – аналогичная величина для лучевой кости
Примем, что ось вращения лучевой кости проходит через точки О2 и К1, составляя постоянный угол β с локтевой костью (соответствующее шарнирное соединение показано пунктиром). Нас интересует перемещение точек К1 и К2, так как именно они и осуществляют результирующее движение запястья. Положение руки определяется следующими величинами: α – угол между плечом и горизонтальной плоскостью; ψ – угол поворота плеча вокруг своей оси; φ – угол между предплечьем и горизонтальной поверхностью (сгибание); ξ – угол пронации/супинации. Для определения кинематических параметров системы воспользуемся методом Денавита-Хартенберга [6]. На рис. 7 показана последовательность перехода систем координат для реализации этого метода.
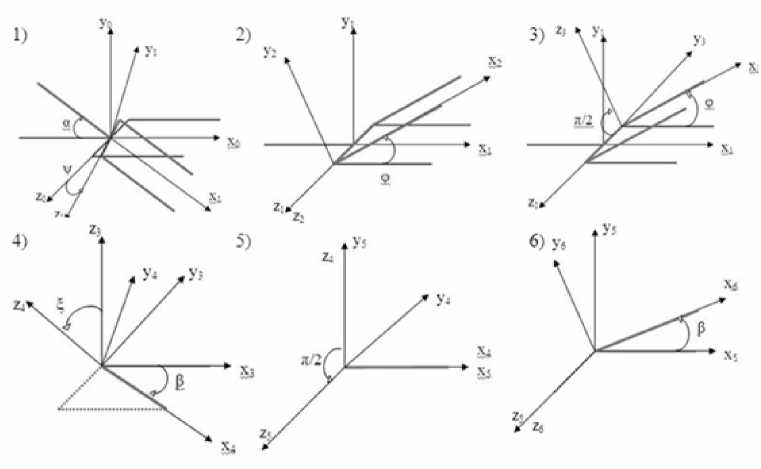
Рис. 7. Преобразование систем координат
При этом осуществляются следующие преобразования:
-
1) Переход из неподвижной системы координат XYZ 0 в подвижную систему координат XYZ 1 , связанную со звеном 1 (плечевая кость). При этом осуществляется поворот на угол α вокруг оси z и поворот на ψ вокруг оси x.
-
2) Переход из подвижной системы координат XYZ 1 в подвижную систему координат XYZ 2 , связанную со звеном 2 (локтевая кость). При этом осуществляется поворот на угол φ вокруг оси z и смещение на величину a вдоль оси z.
-
3) Переход из подвижной системы координат XYZ 1 в подвижную систему координат XYZ 3 , связанную со звеном 3 (лучевая кость при движении совместно с локтевой). При этом осуществляется поворот на угол φ вокруг оси z, смещение на величину b вдоль оси z и поворот на 90° вокруг оси x.
-
4) Переход из подвижной системы координат XYZ 3 в подвижную систему координат XYZ 4 , связанную с осью вращения лучевой кости. При этом осуществляется поворот на угол β вокруг оси z и поворот на угол ξ вокруг оси x.
-
5) Переход из подвижной системы координат XYZ 4 в подвижную систему координат XYZ 5 , связанную с осью вращения лучевой кости (для изменения положения осей). При этом осуществляется поворот на 90° вокруг оси x.
-
6) Переход из подвижной системы координат XYZ 5 в подвижную систему координат XYZ 6 , связанную с лучевой костью. При этом осуществляется поворот на угол β вокруг оси z.
Матрицы соответствующих переходов будут иметь следующий вид:
см (a) aln (а)саз ($) sin (cOsin (^} O' e sin (ff) CQS(tr)CQS (i^) CDS(tt)sHn (^) о и 0 sin (^} cos(^) О
. О 0 01.
’cos ftp) sin (p) о
q
sin ( 0 01 Я . 0 00 1 413 - cos ( 0 sin (ф) O' 0 cos ( 1 0 -b 0 0 1. (3) сов(Д) sin (/7) ces (О sin (/7)^, (D0 0 sin (O cos (О0 ^45 — О О ■О о о 1 о о 1 о о О О О 1- ^56 ~ 1 о о .о о СОЗ (0) sin О?) Q о о гоя (/2) о О" О О На основе полученных матриц перехода можно получить координаты точек К1 и К2 (точки соединения локтевой и лучевой костей с запястьем) используя следующие соотношения: ; (7) , где , – координаты векторов ОК1 и ОК2 в подвижных системах координат 2 и 6 соответственно, , – координаты векторов ОК1 и ОК2 в неподвижной системе координат. Результаты моделирования движения руки показаны на рис. 8. Ни рис. 8.1-8.3 изображены полученные траектории точек К1 (1) и К2 (2) при сгибании от 0° до 120°, а также траектория точки К2 (3) при ротации предплечья на 120° (для трех различных углов сгиба, графики 1-3 соответственно) и положения локтевой (4) и лучевой (5) костей. Положение лучевой кости показано для нескольких углов ротации. На рис. 8.4 показана рабочая область точки К2 при следующих диапазонах изменения углов: ψ – от -15° до 15°, φ – от 0° до 120°, ξ – от -60° до 60°. Рис. 8. Траектории точек К1и К2 и положение костей предплечья Выводы: полученная кинематическая модель движения руки в локтевом суставе позволяет определить требуемую рабочую область реабилитационного устройства, а также форму траекторий, которые должна обеспечивать система реабилитации для реализации естественных движений в локтевом суставе. Кроме того, данная модель может быть использована в дальнейшем при изучении совместного движения руки и механотерапевтического устройства, оптимизации его параметров и отладки различных алгоритмов работы.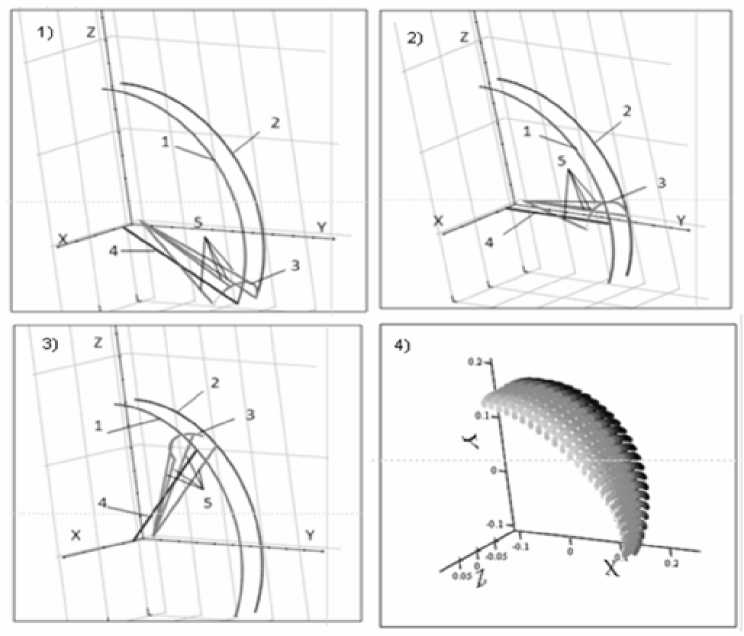
Список литературы Кинематический анализ движения руки в локтевом суставе при реабилитации методами механотерапии
- Белова, А.Н. Нейрореабилитация. -М.: Антидор, 2000. 568 с.
- Зациорский, В.М. Биомеханика двигательного аппарата человека/В.М. Зациорский, А.С. Аруин, В.Н. Селуянов. -М.: Физкультура и спорт, 1981. 43 с.
- Коган, О.Г. Медицинская реабилитация в неврологии и нейрохирургии/О.Г. Коган, В.Л. Найдин. -М.: Медицина, 1988. 304 с.
- Синельников, Р.Д. Атлас анатомии человека в 3 томах, том 1.Учение о костях, суставах и мышцах. -М.: Медицина, 1972. 458 с.
- Малая медицинская энциклопедия. -М.: Медицинская энциклопедия. 1991-96 гг.
- Shahinpoor, M. Robot Engineering Textbook. Harper and Row, New York, 1987. 527 p.
- Lum, P. Robotic Devices for Movement Therapy After Stroke: Current Status and Challenges to Clinical Acceptance/P. Lum, D. Reinkensmeyer, R. Mahoney et al./Top Stroke Rehabil. 2002. N 8(4). P.40-53.
- Mansour, G. A kinematic and dynamic model of the human upper extremity/G. Mansour, S. Mitsi, K.-D. Bouzakis//Proceedings of the 3rd International Conference on Manufacturing Engineering (ICMEN), 1-3 October 2008, Chalkidiki, Greece. P 885-891.
