Кинематика привода как функция угла поворота платформы манипулятора

Автор: Шамутдинов А.Х., Леонов Д.И.
Журнал: Форум молодых ученых @forum-nauka
Статья в выпуске: 9 (25), 2018 года.
Бесплатный доступ
Исследована функция угла поворота наклонной платформы манипулятора от времени, при скорости перемещения штока гидроцилиндра от геометрии при постоянной скорости перемещения а цилиндра при скорости шток гидро
Оригинальная часть манипулятора, платформа, опорно-поворотное устройство, гидроцилиндр, угловая скорость, программа mathcad 14
Короткий адрес: https://sciup.org/140284315
IDR: 140284315
Kinematics of the drive as the function of the angle of a rotation of the platform of a manipulator
The function of the angle of rotation of the inclined platform of the manipulator with respect to time is studied, at a constant speed of displacement of the rod of the hydraulic cylinder; from geometry with a constant speed of movement the rod of the hydraulic cylinder and with the variable speed of the displacement of the rod of the hydraulic cylinder
Текст научной статьи Кинематика привода как функция угла поворота платформы манипулятора
Для исследования выбран оригинальный манипулятор, описанный в [1, c.65], [2, с.2], [3, с.2]. Кинематическая схема оригинальной части манипулятора представлена на рис. 1. Как было описано ранее, оригинальность данного пространственного манипулятора заключается в создании поступательного вертикального перемещения посредством двух встречных вращений наклонной платформы 1 и опорно-поворотного стола 2 [4, с.248].
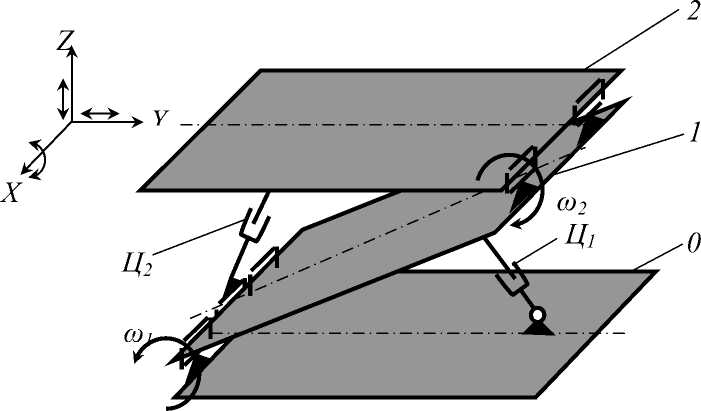
Рис. 1. Кинематическая схема оригинальной части манипулятора
0 - Основание; 1 – Наклонная платформа; 2 – Опорно-поворотное устройство; Ц1, Ц2 – Приводные устройства (гидроцилиндры).
Сведём движения манипулятора к моделированию соотношений в изменяемом «треугольнике», одна сторона которого изменяет свой размер и конструктивно исполнена, например, гидроцилиндром со штоком (рис. 2).
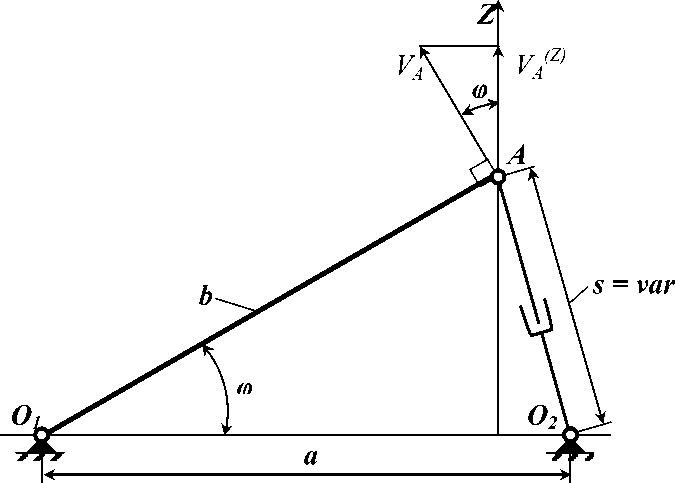
Рис. 2. Расчетная схема изменяемого треугольника механизма при s = var
s = О 2 А =var – изменяемая длина штока гидроцилиндра; О 1 О 2 = а = const – расстояние между опорами; О 1 А = b = const – длина наклонной платформы; φ = var – угол наклона наклонной платформы.
Рассмотрим движение манипулятора как функцию угла φ . Здесь можно рассмотреть 2 момента:
,у _ ds _
-
1) изменение φ при V = = const ,
ds
-
2) изменение φ при V = = var .
Из треугольника ∆О 1 АО 2 имеем:
s2 = a2 + b2
-
2a∙b∙cosφ ,
откуда
ф =
arccos
22 a + b
—
5 2 )
v 2 ab 7
,
при этом a = const, b = const.
Рассмотрим 2 случая:
1) Полагая, что s = V∙t ,
т.е. изменение суммарной длины s штока с
гидроцилиндром происходит
с постоянной
скоростью, т.е. V = const ,
выражение (1) запишется:
a
ф = arccos
2 + b b
—
( a b V2
v 2 ab 7
= arccos-- 1--
( 2 b 2 a
—
• t
2 ab
Выбирая конструктивно параметры так, что a = b выражение
V 2 2
преобразуется: ф = arccos(1 —2- • t ) или
|
V 2 2 ф (t ) = arccos(1-- у • t ) 2 a 2 |
(3) |
-
2) Изменение суммарной длины s штока с гидроцилиндром происходит с переменной скоростью, т.е. V = var , выражение (2) запишется:
. ( V2 ,^
ф ( V , t ) = arccos 1 •• t
I 2 az J
(4)
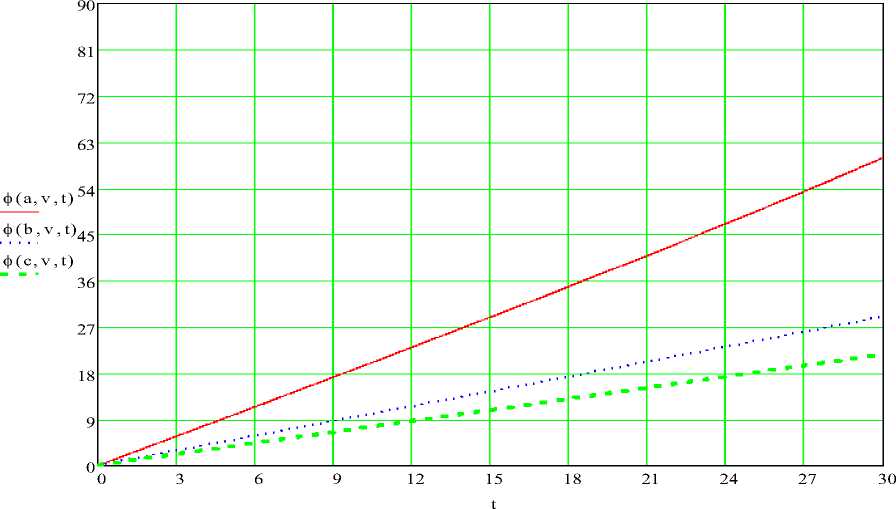
Используя пакет программы MathCAD 14, приводим зависимости выражений (3), (4) которые представлены на рис.3( а , б ) и рис. 4( а , б ).
а)
v := 0.0] t := 0 , 0 + 0.01 .. 30 a := 0.2 b : = 0.0 c : = GJ
б)
v := 0.02 t := 0 , 0 + 0.01 .. 30
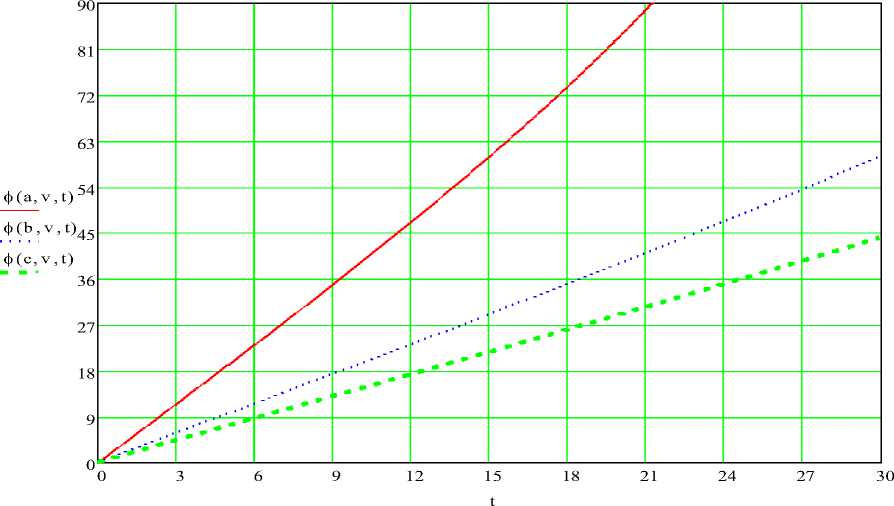
Рис. 3. Зависимость угла поворота наклонной платформы ф(а, V, t) от времени t = var при разных скоростях штока гидроцилиндра
0 0
в)
t := 10 v := 0 , 0 + 0.01 .. 0.
ф (b , v ,045 ф (c , v , t)
ф (a , v , t)54
|
♦ |
|||||||||
|
* |
|||||||||
|
♦ |
|||||||||
|
♦ |
|||||||||
|
/ ♦ ? + |
|||||||||
|
/ ?> |
t |
||||||||
|
/ '^ |
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
v
0.2
г)
t := 10 v := 0 , 0 + 0.01 .. 0.:
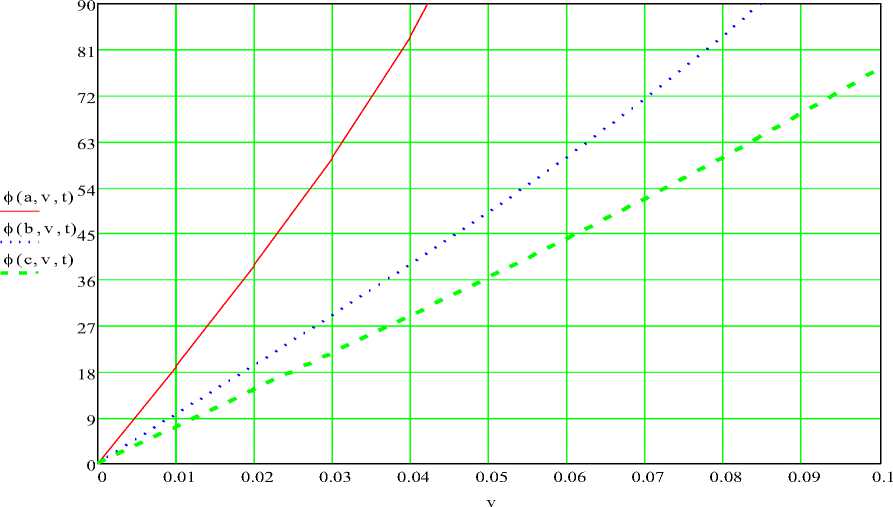
Рис. 4. Зависимость угла поворота наклонной платформы ф(а, V, t) от скорости движения штока V = var
Выводы:
1) с увеличением скорости движения штока гидроцилиндра V, поворот платформы осуществляется быстрее;
2) зависимость
ф ( V, t ) = arccos 1
к
V 2 2 a 2
• tт
при V = 0,01
- 0,02 м/сек и
t≤ 12 сек , практически линейна;
-
3) в рабочем диапазоне изменение угла α = 0° - 45° и угловая
скорость движения наклонной платформы 1 (или опорно-поворотного устройства 2) изменяются незначительно, что благоприятно для работы манипулятора.
Список литературы Кинематика привода как функция угла поворота платформы манипулятора
- Балакин, П. Д. Схемное решение механизма пространственного манипулятора / П.Д. Балакин, А. Х. Шамутдинов // Омский научный вестник. - 2012. - № 2. - С.65-69.
- Пат. №120599 РФ, МПК В25J1/00. Пространственный механизм / Балакин П.Д., Шамутдинов А.Х. Заявка №2011153160/02, 26.02.2011. Опубл. 27.09.2012, Бюл. №27.
- Пат. №170930 РФ, МПК В25J1/00. Пространственный механизм с шестью степенями свободы / Балакин П.Д., Шамутдинов А.Х. Заявка №2016115295, 19.05.2016. Опубл. 15.05.2017, Бюл. №14.
- Люкшин, В. С. Теория винтовых поверхностей в проектировании режущих инструментов / В. С. Люкшин. - М.: Машиностроение, 1967. - 372 с.
